Korean Journal of Remote Sensing, Vol.35, No.3, 2019, pp.471~482
https://doi.org/10.7780/kjrs.2019.35.3.10 ISSN 1225-6161 ( Print )
ISSN 2287-9307 (Online)
Article
고해상도 다기능 스테레오 카메라 지상 검증 및 분석 시스템 구현
신상윤 1)·고형호 2)†
Implementation of the Verification and Analysis System for the High-Resolution Stereo Camera
Sang-Youn Shin
1)·Hyoungho Ko
2)†Abstract: The mission of the high-resolution camera for the lunar exploration is to provide 3D topographic information. It enables us to find the appropriate landing site or to control accurate landing by the short distance stereo image in real-time. In this paper, the ground verification and analysis system using the multi-application stereo camera to develop the high-resolution camera for the lunar exploration are proposed. The mission test items and test plans for the mission requirement are provided and the test results are analyzed by the ground verification and analysis system. For the realistic simulation for the lunar orbiter, the target area that has similar characteristics with the real lunar surface is chosen and the aircraft flight is planned to take image of the area. The DEM is extracted from the stereo image and compose three dimensional results. The high-resolution camera mission requirements for the lunar exploration are verified and the ground data analysis system is developed.
Key Words: Lunar, Orbiter, Exploration, Multi-application, Stereo, Camera, DEM
요약 : 달 탐사용 고해상도 스테레오 카메라의 임무는 달 궤도선 및 착륙 선에 탑재되어 달 표면의3차원 지형 정보를 제공하는데 있다. 이를 통해, 달 착륙 후보지를 탐색하고 착륙 시에는 달 표면 근접에 따른 근거리 입체 영상을 실시간으로 제공하여 정확한 지점에 착륙이 가능하도록 한다. 본 논문에서는 달 탐사선에 탑재되는 달 탐사용 고해상도 카메라 개발을 위한 지상모델인 다기능 스테레오 카메라를 활용하여 고해상도 스테레오 카 메라에 요구되는 임무를 검증하고 결과를 분석하기 위해 지상검증 및 분석 시스템을 제안하였다. 지상검증 및 분석 시스템은 임무 검증을 위한 임무검증항목과 시험계획을 제공하며, 시험 수행 후 결과를 분석하게 된다.
이를 위해 본 논문에서는 달 지형과 유사한 지역을 대상으로 지상 임무항목시험 계획을 세우고, 항공촬영을 통 해 스테레오 영상을 획득하였다. 분석장치를 통해 스테레오 영상으로부터 영상을 보정 및 매칭 후 수치표고모 델(DEM)을 추출하고 3차원 영상을 생성하여 결과를 분석하였다. 달 탐사용 고해상도 카메라에 요구되는 임무 수행항목이 검증되었고, 스테레오 영상을 처리할 수 있는 지상처리분석 시스템이 확보 되었다.
Received June 19, 2019; Revised June 20, 2019; Accepted June 24, 2019; Published online June 26, 2019
1)
한국항공우주연구원 위성탑재체 개발부 선임연구원 (Senior Researcher, Satellite Payload Development Division, Korea Aerospace Research Institute)
2)
충남대학교 전자공학과 부교수 (Associate Professor, Department of Electronics Engineering, Chungnam National University)
†Corresponding Author: Hyoungho Ko ([email protected])
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License
(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in
any medium, provided the original work is properly cited.
1. 서 론
1960년대부터 1970년대에 걸친 냉전시대 이후, 달 탐 사선을 이용한 달 탐사는 1990년대부터 다시 본격적으 로 시작되었다. 클레멘타인(1994, 미국), 루나 프로스펙 터(1998, 러시아), 스마트1호(2003, 유럽연합), 셀레네 (2007, 일본), 창어 1호(2007, 중국), 찬드리안 1호 (2008, 인도 ), LRO(2008, 미국), 창어 2호(2010, 중국), 창어 3호 (2013, 중국), 창어 4호(2019, 중국), 찬드리안 2호(2019 발 사예정 , 인도) 등의 달 탐사 위성이 발사 또는 발사예정 중에 있으며 , 특히 창어 4호는 인류 최초로 달의 뒷면을 탐사하기도 하였다 (Bhandari, 2005; Hisahiro et al., 2005;
Kato et al., 2006; Sun et al., 2005). 달 탐사 위성은 그 목적 에 따라 여러 가지 탑재체가 탑재된다. 탐사목적에 따라 수집하고자 하는 데이터의 특성이 달라지며 이에 적합 한 탑재체를 개발하게 된다 . 현재 한국에서도 달 탐사선 개발 프로그램을 통해 달 탐사선 개발 중에 있으며 , 수 년 내에 달 탐사용 궤도 선을 보내는 것을 목표로 하고 있다 . 달 탐사선은 달 궤도 선을 달 궤도에 안착시키게 되는데 현재 달 궤도 선에 탑재 예정인 탑재체에는 5미 터 급의 고해상도 카메라 , 광시야 편광 카메라, 달 자기 장 측정기 , 감마선 분광기 등이 있다. 특히, 고해상도 카 메라는 달의 지형을 파악하고 향후 착륙선의 착륙 후보 지를 찾는 주요임무를 갖는다.
본 논문에서는 다기능 스테레오 카메라를 활용한 지 상모델 지상 검증 및 분석 시스템을 개발하여 고해상도 카메라에 요구되는 임무를 검증하고 분석하였다 . 이를 위해 먼저 , 달 탐사선에 탑재되는 달 탐사용 고해상도 카메라에 요구되는 임무항목에 대해 알아보고 , 다기능 스테레오 카메라 지상검증 시스템을 통해 검증계획을 수립한 뒤 수행 후 얻어진 결과를 분석하고자 하였다 . 달 궤도선과 착륙 선에 장착되는 탐사용 고해상도 카메 라의 임무에 따라 다기능 스테레오 카메라 시스템에 요 구되는 임무항목은 1차원 푸쉬부룸 방식의 시지연 방 식에 의한 스테레오 촬영, 2차원 프레임 방식의 실시간 스테레오 촬영 , 고도에 따라 줌 기능 제어를 통한 관측 폭 및 해상도 가변 , 스테레오 카메라간의 각도 제어 기 술이 있으며 , 각 임무 별 검증을 통해 가변해상도 스테 레오 촬영 탑재체 기술을 확보하고자 하였다 . 이러한 임 무항목을 검증하기 위한 시험계획 및 절차 서를 지상검
증시스템으로부터 도출하게 되는데 각 임무 기능별로 촬영 대상지역 , 시험방법, 시험조건, 운영모드와 이에 따른 카메라 촬영 변수들이 준비되고 , 최종적으로 실제 항공 촬영을 통해 스테레오 영상 데이터가 얻어진다 . 항 공기에 실제 탑재하여 시험하기 전에는 카메라를 정속 으로 회전시켜 1차원 푸쉬부룸 및 2차원 프레임 촬영 시 험을 수행하여 스테레오 영상 생성 기능을 사전에 검증 하였다(Heo and Yong, 2012a). 또한, 항공기에 탑재하여 기능시험을 수행함으로써 임무요구사항을 검증하기 위한 기능이 사전에 확인되었다 (Heo et al., 2012b).
지상분석시스템에서는 획득된 스테레오 영상으로부 터 영상 보정 , 매칭을 통해 위치간의 상대적인 깊이 정보 를 취득하여 수치표고모델 (DEM)을 추출하고, 이로부 터 3차원 영상을 생성하여 촬영지역의 지형을 파악함으 로써 최종 결과를 확인하게 된다 . 수치표고모델(DEM) 제작 및 평가 연구는 고해상도 위성이 운영되면서 본격 적으로 연구되어 왔으며 , 재난지역 파악과 같이 신속하 고 정밀한 수치지도제작을 위해 무인항공기를 이용한 수치표고모델 제작도 이루어지고 있다(Rhee et al., 2009;
Rhee et al., 2011; Oh et al., 2014; Lim et al., 2017). 지상검증 및 분석 시스템 개발에 앞서 상용 스테레오 카메라를 이 용한 스테레오 영상 시뮬레이터를 구성하였다 . 스테레 오 영상을 촬영 및 실시간 3차원 디스플레이를 할 수 있 는 기능을 제공하며 , 임무계획 시 시험 조건에 따른 3차 원 결과영상을 실시간으로 확인 해 볼 수 있었다 . 항공 촬영을 통해 얻어진 스테레오 영상결과 또한 시뮬레이 터의 3차원 디스플레이 장비를 통해 최종 결과물을 확 인할 수 있다.
지상분석 시스템은 향후 실제 달 탐사용 고해상도 카 메라가 달 표면을 촬영하여 스테레오 영상을 지상으로 전송 시 스테레오 영상 지상처리를 위해 활용될 수 있다 . 또한 , 탑재체 내에 실시간 스테레오 영상분석 장치 처 리시스템에 적용되어 달 표면 착륙지점의 정보를 실시 간으로 처리하는데 활용할 수 있다 .
2. 달 탐사위성의 임무 및 탑재체
1) 달 탐사 위성 임무 별 탑재체
달 탐사 위성들의 임무와 임무를 수행하기 위해 탑재
되었던 탑재체를 Table 1과 같이 정리하였다.
2) 탑재체별 고해상도 스테레오 카메라 규격 현황
달 탐사용 고해상도 카메라는 달의 표면을 조사 및 달 표면의 지형 파악 , 달 지도 제작 등의 목적으로 탑재 된다 . Table 2에서는 달 궤도 위성에 탑재되었던 고해상 도 스테레오 카메라의 해상도, 촬영 폭, 대역폭 등 주요 규격을 정리하였다 (Burns et al., 2012; Haruyama et al., 2012;
Gopala Krishna et al., 2009).
3. 다기능 스테레오 카메라 시스템
1) 스테레오 카메라 시뮬레이터
지상검증용 다기능스테레오 카메라는 두 개의 광학 부 , 전자 부를 이용해 스테레오 영상을 얻고 이를 통해 깊이 정보를 구함으로써 지형의 모양을 파악할 수 있다.
이를 위해 스테레오 카메라는 사람이 스테레오 영상을 통해 입체를 인지하는 과정을 두 개의 광학 부를 이용 하여 구현 한 카메라이다 . 두 개의 렌즈가 갖는 각에 의 해 서로 다른 각도에서 입사되는 영상을 이용하여 깊이 정보를 얻을 수 있으며, 촬영대상과 카메라와의 거리에 따라 원근감을 갖게 된다 . 스테레오 카메라 영상은 기
하 식에 의해 깊이 정보를 구할 수 있으며 식 (1)과 같다 (Jain et al., 1995).
Z = (1) 여기서 , Z는 depth, d는 변이 값(disparity), b는 거리 차 (baseline), f는 초점거리(focal length)를 나타낸다. 식 (1) 에 의해 스테레오 카메라로 어떤 물체를 촬영해 보면, 가까이에 있는 물체를 촬영한 경우 왼쪽 영상과 오른쪽 영상의 차이가 멀리 있는 물체를 촬영한 경우보다 상대 적으로 크게 된다 . 두 카메라간의 간격이 클수록 변이 값이 커지게 되어 거리정보를 더욱 정밀하게 파악할 수 있다 . 따라서, 스테레오 카메라로 더 높은 정밀도의 거 리정보를 구하고자 할 때에는 카메라와 카메라 사이를 넓혀 볼 수 있다 . 또한 카메라 렌즈의 초점거리를 길게 할 수도 있다 . 하지만, 변이 값을 크게 하거나 초점거리 를 길게 할 경우 거리 정보를 계산할 수 있는 3차원 공 간상의 영역은 줄어들게 된다 . 따라서 임무검증계획 시 임무검증항목을 수립하고 시험 파라미터를 정하는 데 있어, 시험 파라미터에 따른 결과를 사전에 확인해 보 는 것이 필요하다.
Fig. 1은 다기능 스테레오 카메라 설계를 위해 상용 스테레오 카메라를 이용하여 구성한 시뮬레이션 장치 이다 . 카메라 및 스테레오 영상으로부터 입체영상을 실 시간으로 확인하기 위한 편광 디스플레이 장비로 구성 되어 있다 . 임무검증 시험 계획 시 본 장비를 이용하여 시험 파라미터를 조정하면서 결과를 실시간으로 확인 할 수 있다 .
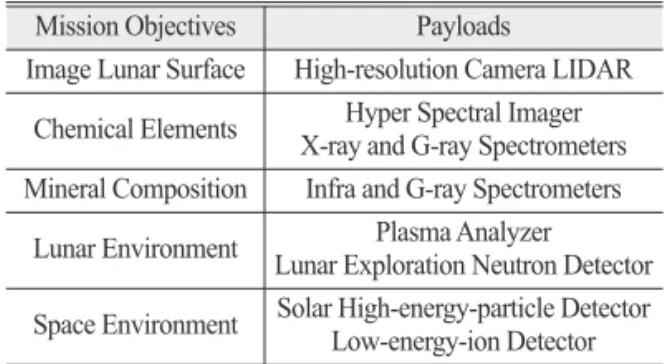
bf d Table 1. Lunar Orbiter Mission Objectives and Payloads
Mission Objectives Payloads
Image Lunar Surface High-resolution Camera LIDAR Chemical Elements Hyper Spectral Imager
X-ray and G-ray Spectrometers Mineral Composition Infra and G-ray Spectrometers
Lunar Environment Plasma Analyzer Lunar Exploration Neutron Detector Space Environment Solar High-energy-particle DetectorLow-energy-ion Detector
Table 2. High-Resolution Stereo Camera of the Lunar Orbiters
Obiter Resolution, Swath, Bandwidth Selene 10 m, 41 km, 430-850 nm Chang’e-1 120 m, 60 km, 500-750 nm (PAN) Chandrayaan-1 10 m, 20 km, 400-900 nmLRO 0.5 m, 5 km, 400-750 nm (NAC) Chang’e-2 7 m, 15 km, PAN
Fig. 1. Stereo Camera Simulator.
2) 다기능 스테레오 카메라 파라미터
지상검증용 다기능 스테레오 카메라는 항공탑재 관 측을 통한 지상검증을 목적으로 하고 있으므로, 카메라 의 동작 파라미터는 항공기 관측 고도 3 km 비행속도 280 km를 기준으로 정하였다. 고도 변화 및 줌인 기능 을 이용하여 초점거리를 달리함으로써 촬영 폭 및 스테 레오 영상을 이용한 거리 계산 성능을 검증할 수 있도 록 하였다 .
3) 다기능 스테레오 카메라 시스템 구성
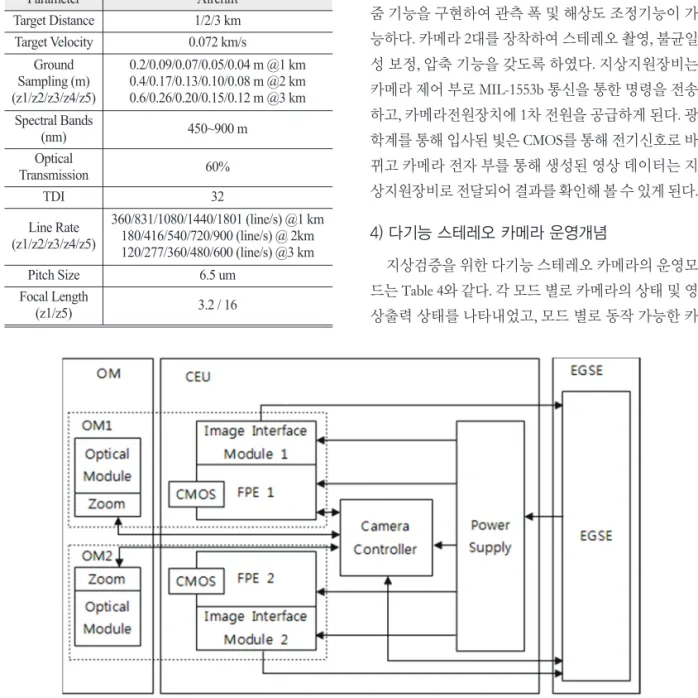
지상검증용 위한 다기능 스테레오 카메라는 광학 계 (OM, Optical Module), 카메라 전자부(CEU, Camera Electronics Unit)로 구성된다. Fig. 2와 같이 카메라 전자 부는 초점면전자부 (FPE, Focal Plane Electronics), 카메 라 제어 부 (CC, Camera Controller), 카메라 전원 부, 지상 지원장비 (EGSE, Electrical Ground Support Equipment) 로 구성된다 (Heo et al., 2012b).
CMOS 센서를 이용하여 간단한 카메라 전자 부 구조 및 1차원과 2차원 촬영이 모두 가능하도록 하였고, TDI 를 포함한 선형 스캐닝 , 2차원 스냅샷이 가능하며, 광학 줌 기능을 구현하여 관측 폭 및 해상도 조정기능이 가 능하다 . 카메라 2대를 장착하여 스테레오 촬영, 불균일 성 보정 , 압축 기능을 갖도록 하였다. 지상지원장비는 카메라 제어 부로 MIL-1553b 통신을 통한 명령을 전송 하고 , 카메라전원장치에 1차 전원을 공급하게 된다. 광 학계를 통해 입사된 빛은 CMOS를 통해 전기신호로 바 뀌고 카메라 전자 부를 통해 생성된 영상 데이터는 지 상지원장비로 전달되어 결과를 확인해 볼 수 있게 된다 .
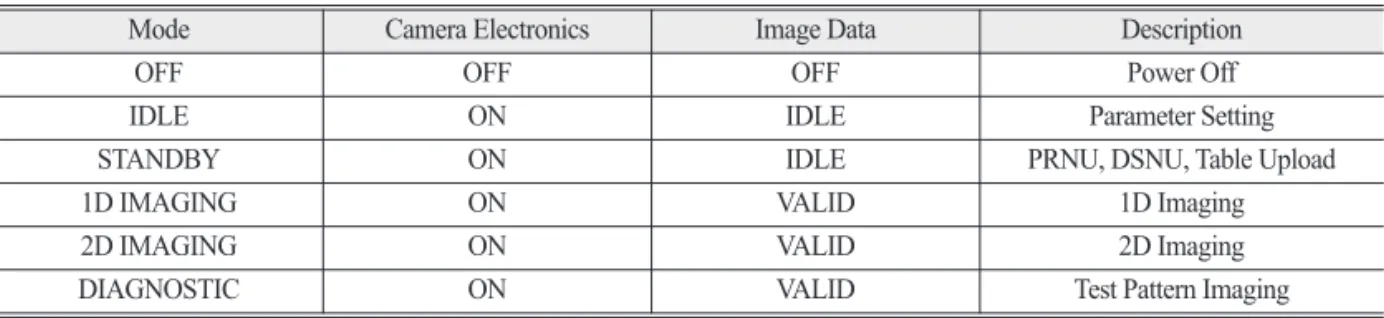
4) 다기능 스테레오 카메라 운영개념지상검증을 위한 다기능 스테레오 카메라의 운영모 드는 Table 4와 같다. 각 모드 별로 카메라의 상태 및 영 상출력 상태를 나타내었고 , 모드 별로 동작 가능한 카 Table 3. Multi-application Stereo Camera Parameters for
the Aircraft
Parameter Aircraft
Target Distance 1/2/3 km Target Velocity 0.072 km/s
Ground Sampling (m) (z1/z2/z3/z4/z5)
0.2/0.09/0.07/0.05/0.04 m @1 km 0.4/0.17/0.13/0.10/0.08 m @2 km 0.6/0.26/0.20/0.15/0.12 m @3 km Spectral Bands
(nm) 450~900 m
Optical
Transmission 60%
TDI 32
Line Rate (z1/z2/z3/z4/z5)
360/831/1080/1440/1801 (line/s) @1 km 180/416/540/720/900 (line/s) @ 2km 120/277/360/480/600 (line/s) @3 km
Pitch Size 6.5 um
Focal Length
(z1/z5) 3.2 / 16
Fig. 2. Multi-application Stereo Camera System Functional Block.
메라의 기능을 정리하였다 .
다기능 스테레오 카메라 운영모드 전환은 Fig. 3과 같 으며 각 모드의 전환은 모드 전환 명령에 의해 이루어 지게 된다 .
4. 다기능 스테레오 카메라 지상 검증시스템
위성탑재체 우주환경시험은 우주환경과 지구환경 의 차이로 인해 실제 임무와 관련된 시험은 제한적으로 수행된다. 다기능 스테레오 카메라 지상검증시스템에 서는 지상검증 모델을 이용하여 실제 임무 수행에 필요 한 요구기능 수준의 검증시험 계획 및 절차를 준비하고 파라미터 분석을 수행하였다 . 또한, 스테레오 영상 지상 처리를 통해 결과를 분석하였다 .
1) 다기능 스테레오 카메라 지상 시험 계획
항공기를 이용한 고해상도 스테레오 카메라 임무검 증 지상시험을 위해 다기능 스테레오 카메라 지상모델 을 항공기에 탑재하고 1차원 푸쉬부룸 방식의 시지연 방식에 의한 스테레오 촬영 , 2차원 프레임 방식의 실시 간 스테레오 촬영 , 고도에 따라 줌 기능 제어를 통한 관 측 폭 및 해상도 가변 , 스테레오 카메라간의 각도 제어 기술 등을 포함한 임무검증항목을 시험하고자 하였다 . 항공기를 이용한 지상촬영을 하기 위해서는 먼저 기상 정보 , 허가 지역, 촬영시기, 촬영장비 및 항공기에 대한 정보 등을 포함한 촬영계획서를 작성하게 되며 , 촬영계 획서는 아래 내용을 포함하여 작성하게 된다 .
1) 비행지도(Flight map) 설계 2) 촬영시방서(Specifications) 설계
a. 카메라(Camera) 특성 b. 축척(Scale)
c. 촬영고도(Flight height) d. 중복도(Side & End lap) e. 경사각(Tilt Angle)
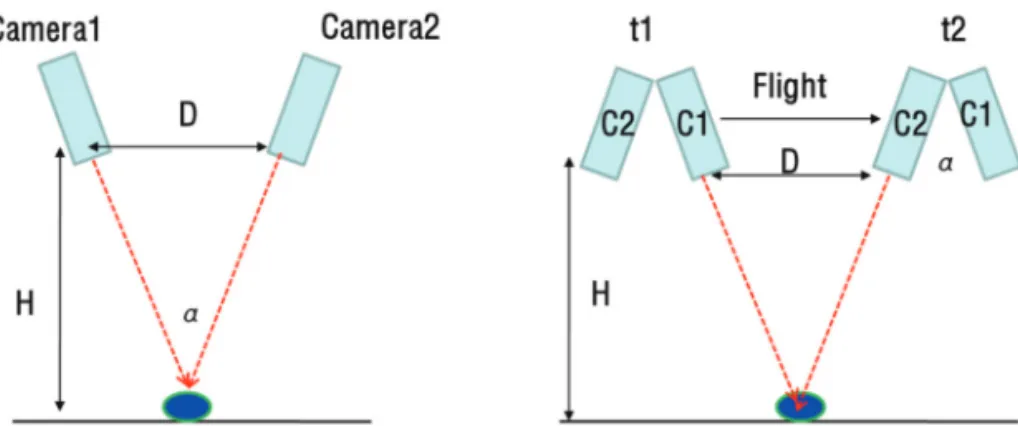
촬영계획 수립 시 스테레오 촬영방법도 고려하여야 하며 , 실제 위성을 이용한 스테레오 촬영은 Fig. 4와 같 이 영상중첩을 통해 실시간으로 깊이 정보를 얻는 방식 과 다른 궤도상에서 같은 지점을 촬영하여 깊이 정보를 얻는 방식이 있다 . 다기능 스테레오 카메라는 두 카메 라의 각도 조절 및 배율 조정이 가능하므로 , 여러 가지 스테레오 시험 촬영이 가능하다 .
촬영계획이 세워지면 촬영 파라미터 분석을 통해 최 적의 값을 찾게 되며 , 동작 파라미터에 따른 시스템 성 능을 확인한다 . 본 논문에서는 고도 별 관측 폭을 확인 하고 (Fig. 5), 중첩률을 분석하여 스테레오 정합에 필요 Table 4. Multi-application Stereo Camera Operation Mode
Mode Camera Electronics Image Data Description
OFF OFF OFF Power Off
IDLE ON IDLE Parameter Setting
STANDBY ON IDLE PRNU, DSNU, Table Upload
1D IMAGING ON VALID 1D Imaging
2D IMAGING ON VALID 2D Imaging
DIAGNOSTIC ON VALID Test Pattern Imaging
Fig. 3. Multi-application Stereo Camera Operation Mode
Transition
한 중첩률을 확보하기 위한 파라미터 값을 구하였다 . Table 5에서는 두 카메라간의 각도 10도에 대하여 각 고 도 별 중첩률을 분석하였다 .
중첩률은 고도에 따라 달라지지 않으며 , 촬영고도가 낮아질수록 관측 폭이 작아지게 되어 중첩영역의 크기 가 줄어들게 된다 . 다기능 스테레오 카메라는 두 카메 Fig. 5. Swath Calculation.
Table 5. Swath, Overlap Rate Analysis (@Tilt Angle : 10°)
Altitude Parameter Z1 Z2 Z3 Z4 Z5
1 km Swath (m) 409.6 177.5 136.5 102.4 81.9
2D Overlap Rate 57.0 0.7 -29.1 -72.2 -115.2
2 km Swath (m) 819.2 355.0 273.1 204.8 163.8
2D Overlap Rate 57.0 0.7 -29.1 -72.2 -115.2
3 km Swath (m) 1228.8 532.5 409.6 307.2 245.8
2D Overlap Rate 57.0 0.7 -29.1 -72.2 -115.2
Fig. 4. Realtime Stereo Imaging (Left), Time Delay Stereo Imaging (Right).
라간의 각을 제어하여 고도에 따라 중첩률을 조정할 수 있으며 , 두 카메라간의 각에 따른 중첩률의 관계는 Fig.
6과 같다.
연직방향의 착륙 임무 수행 시에는 착륙지점과의 거 리가 가까워 짐에 따라 두 카메라 간의 각을 조절하여 주시각을 제어하게 된다(Fig. 7).
본 시험은 지상모델을 이용하여 달 궤도선의 임무요 구조건을 확인하는 데 있으며 , 이를위해서는 시험 전 동 작 파라미터 분석을 통해 항공기 탑재를 통한 지상시험 계획의 타당성을 확인해보는 것이 필요하다. Table 6과 같이 항공기와 달 궤도선의 시스템 동작파라미터에 대 한 시스템 성능을 비교 분석함으로써 , 항공기를 이용한
시험을 통해 달 궤도선의 시스템 요구조건에 대한 성능 검증이 가능함을 확인하였다 .
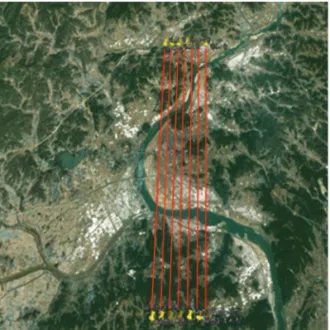
Fig. 8에서는 촬영하고자 하는 지역의 고도를 고려하 여 촬영계획지역을 지도상에 나타내었다 .
임무검증시험을 통해 얻어진 텔레메트리 자료와 영 상자료는 지상에서 분석하게 되며 , 텔레메트리 분석을 통해 영상촬영 파라미터와 모든 명령들이 각 패스별로 모두 정상적으로 작동했는지 확인하여 검증 여부를 파 악한다. 특히 스테레오 영상은 스테레오 영상 지상처리 시스템을 통해 분석하게 된다.
2) 스테레오 영상 지상 처리 시스템
스테레오 영상 지상처리 시스템은 스테레오 영상으로 부터 수치표고모델(DEM)을 생성하는 장치 모듈과 3차 원 스테레오 영상 및 표출 장치 모듈로 구성되어 있다.
수치표고모델 (DEM)을 생성하는 모듈은 다음과 같은 Fig. 6. 2D Overlap Rate Analysis (@3 km, Zoom x1).
Fig. 8. Flight Route Plan on Map.
Fig. 7. Tilt Angle Control according to the Target Distance for Landing.
Table 6. System Parameter and Performance Analysis
Aircraft Lunar Orbiter
System Operation Condition
Zoom Z1 Z5 Z1 Z5
Target Distance (km) 3 3 100 100
Target Scan Speed 280 km/h 280 km/h 1,544 m/s 1,544 m/s System
Performance
GSD (m) 0.61 0.12 20.31 4.06
Swath (m) 1,248 250 41,600 8,320
Integration Time (ms) 7.83 1.57 13.16 2.63
Line Rate (line/s) 128 638 76 380
기능을 갖는다 .
1) 내부 및 외부표정요소 계산을 통한 절대 편위수정 (Rectification)
2) 스테레오 영상의 매칭점 추출을 통한 상대편위수 정(Rectification)
3) 에피폴라(Epipolar) 입체영상 생성 4) 에피폴라 영상의 매칭점 추출
3차원 스테레오 영상 생성 및 표출 장치 모듈은 다음 과 같은 기능을 갖는다 .
1) 생성한 수치표고모델(DEM)을 이용한 정사보정
2) 정사영상(Orthoimage) 모자이크 기능 제작 3) 정사영상(Orthoimage)과 수치표고모델(DEM)을
이용한 3차원 영상 생성 4) 3차원 스테레오 영상 표출
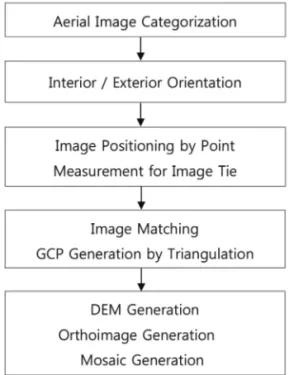
Fig. 9은 수치표고모델(DEM)을 얻기 위한 순서도 이다.
스테레오 영상으로부터 수치표고 모델(DEM)을 얻 을 수 있으며 정사영상 (Orthoimage)과 수치표고 모델을 이용하여 3차원 영상을 생성하고 3차원 스테레오 영상 표출 장비를 이용하여 결과를 확인할 수 있다 .
5. 실험결과
본 절에서는 다기능 스테레오 카메라를 항공기에 탑 재하여 임무검증시험을 수행하여 검증결과를 확인하 고 이를 통해 얻은 스테레오 영상으로부터 수치표고모 델 (DEM)과 3차원 영상 결과를 확인하였다. 1차원 푸쉬 부룸 방식과 2차원 프레임 방식의 지상촬영 임무수행 을 통해 다기능 스테레오 카메라의 파라미터 (Table 3)와 운영모드 (Table 4)에 대한 임무검증시험을 완료하였다.
항공기의 고도 및 속도에 따라 각 배율 별로 초당 라인 수 파라미터를 조정하여 실제 달 탐사용 고해상도 카메 라 시스템의 임무 수행 범위 동작 주파수까지 정상적으 로 스테레오 영상이 지상지원장비 (EGSE)에 저장되는 것을 확인할 수 있었다. 하지만, 1차원 푸쉬부룸 방식을 이용한 스테레오 영상 촬영은 정확한 궤도 제어를 통해 시차를 두고 같은 지역을 촬영하여야 하며 영상을 보정 Fig. 9. DEM Generation Flow.
Fig. 10. Rectified Stereo Image for Each Frame. Fig. 11. Epipolar Image for Each Frame.
하기 위해서 모든 영상 라인 마다 센서 위치 및 자세 정 보를 담고 있는 관성항법장치 (INS, Inertial Navigation System) 정보가 기록되어야 한다. 본 시험에서는 환경적 왜란에 의한 촬영 궤도 제어의 어려움 및 1차원 촬영 스 캐닝 속도보다 INS의 정보 수집 해상도의 제약으로 인 하여 2차원 프레임 방식을 활용한 스테레오 촬영 결과 만을 활용하여 스테레오 영상 지상처리시스템을 검증
하였다 . 이를 위해 동시 촬영 시점에서의 중첩 영상을 사용하여 스테레오 영상을 생성하였다 . 본 논문에서는 카메라 사이의 각도를 10도, 1배 줌으로 촬영된 약 60%
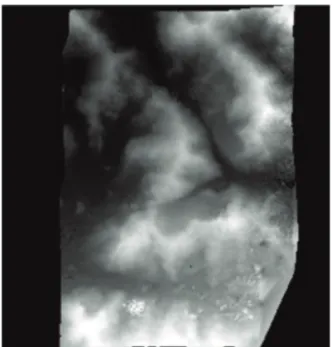
의 중첩 율을 갖는 스테레오 영상을 사용하여 결과를 검 증하였다 . Fig. 10은 내/외부 표정요소 및 매칭 점 추출 을 통해 편위 수정된 스테레오 영상을 나타낸다 . 편위 수정된 영상으로부터 에피폴라 영상(Fig. 11)을 얻을 수 있으며 영상매칭과 삼각측량에 의해 수치표고모델을 Fig. 12와 같이 얻을 수 있다.
본 논문에서는 수치표고모델을 평가하기 위해 SRTM (Shuttle Radar Topography Mission) 표고 데이터를 활용 하였다 (Table 7, Fig. 13). 36°13′09N, 126°55′13E 지점을 중심으로 반경 약 15 km 미터 지역에 대한 지형을 비교 하였다. 본 논문에서는 수치표고 모델을 통해 착륙 후 보지를 찾기 위해 지형파악을 하고자 하였으며 , SRTM Fig. 12. DEM(Digital Elevation Model).
Table 7. SRTM DEM Specification
Data Set Attribute Attribute ValueEntity ID SRTM1N36E126V3 Acquisition Date 2000. 2. 11
Resolution 30 m (1-ARC) Latitude Range 36°00′00″N ~ 37°00′00″N Longitude Range 126°00′00″E ~ 127°00′00″E
Fig. 13. SRTM DEM Data (USGS).
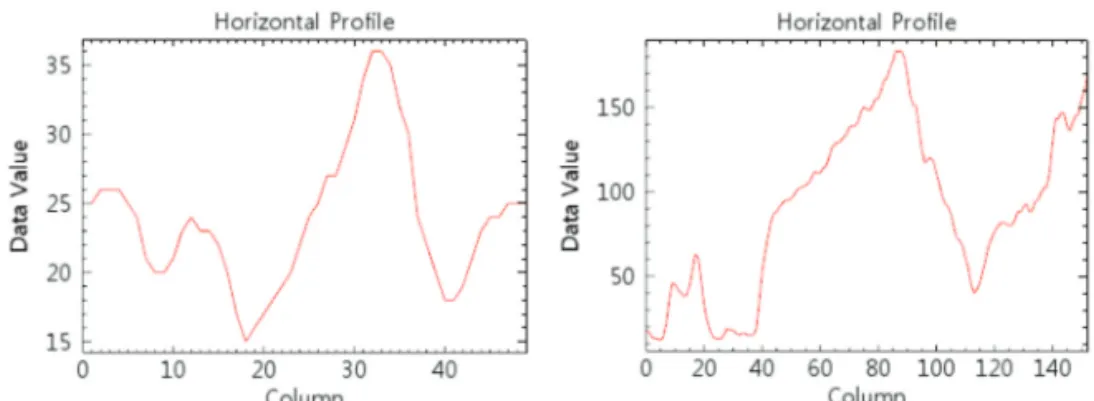
수치표고 데이터와 지형의 형태를 비교하였다(Fig. 14).
육안으로는 유사한 지형의 형태를 보이나 , SRTM과 스 테레오 영상 수치표고모델의 표준편차가 각각 약 36 m, 54 m 로써 오차가 있음을 확인하였다. 하지만 SRTM 수 치표고 데이터의 해상도를 고려하였을 때, 비교적 작은 오차임을 알 수 있다 .
수치표고 모델로부터 3차원 스테레오 영상(Fig. 15) 을 확인하여 촬영지역에 대한 지형을 파악할 수 있었 으며, 촬영지역에 대한 모자이크 영상(Fig. 16)을 확인 하였다 .
6. 결 론