Copyright ⓒ 2019 The Korea Navigation Institute 515 www.koni.or.kr pISSN: 1226-9026 eISSN: 2288-842X https://doi.org/10.12673/jant.2019.23.6.515
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-CommercialLicense(http://creativecommons .org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received 2 November 2019 Revised 20 November 2019 Accepted (Publication) 21 December 2019 (30 December 2019)
*Corresponding Author : Jung-Hoon Lee Tel: +82-42-870-3998
E-mail: [email protected]
위성항법 기반 정밀위치결정 사용자 시스템 주행환경에 따른 성능 분석
Performance Analysis of GNSS Based Precise Positioning User System According to Driving Condition
이 정 훈
*·이 상 우·안 종 선·임 성 혁·천 세 범·허 문 범
한국항공우주연구원 항법기술연구실Jung-Hoon Lee*· Sangwoo Lee · Jongsun Ahn · Sunghyuck Im · Sebum Chun · Moon-Beom Heo Navigation R&D Division, Korea Aerospace Research Institute (KARI), Daejeon 34133, Korea
[요 약]
차세대 지능형 교통시스템(C-ITS)은 육상교통 환경에서 차로구분 수준의 위치결정 정확도를 요구하며, 이는 위성항법시스템 을 활용하는 게 가장 효과적이다. 위성항법 기반 정밀위치결정 시스템에서는 차로구분 성능의 동적환경에 대한 평가가 동반되어 야 하며, 이를 위한 평가 시스템 구성이 선행 될 필요가 있다. 또한 동적인 환경에서 교통 상황이나 도로 상황에 따라 변화하는 다양 한 환경에 따라 성능이 변화하기 때문에, 다양한 환경에서의 성능 검증이 필요하다 . 본 논문에서는 위성항법시스템 기반의 차로구 분 정밀위치 결정 성능 평가를 위한 시스템과 교통, 도로와 같은 주행환경에 따른 성능 분석을 위한 기준에 대해 설명하였다. 실제 시험 평가 구간 주행을 수행하며 수집한 데이터를 바탕으로, 수치적 성능 평가를 진행 했으며, 실제 주행 궤적과 주행영상의 비교 를 통해 실제 차로 구분 성능 평가를 하여 차로구분 정밀위치결정 사용자 시스템의 평가 결과를 도출하였고, 주행환경에 따른 성 능을 분석 하였다.
[Abstract]
The C-ITS requires the lane level positioning of the vehicle in the land transportation environment, and it is most effective to utilize the global navigation satellite system. In the precision positioning system based on satellite navigation, the evaluation of dynamic environment of lane level positioning performance should be accompanied and the evaluation system configuration should be preceded. In addition, performance analysis must be performed according to various environments that change according to traffic or road conditions in a dynamic environment. In this paper, we describe with the performance of traffic and road environment through the evaluation system of lane positioning precision positioning user system based on satellite navigation system. The numerical performance evaluation was carried out based on the data collected by carrying out the actual driving. The performance evaluation by the actual driving trajectory and driving image comparison was performed to derive and analyse evaluation results of positioning performance according to driving condition
Key word : GNSS, RTK, Lane level positioning, Precise positioning, Test and evaluation.
Ⅰ. 서 론
교통 선진국들은 교통체계의 효율적인 관리를 위하여 교통 수요관리 정책을 시행 중이며 이를 위한 효율성, 안전성, 친환 경성 등을 증대시킬 수 있는 차세대 지능형 교통시스템 (C-ITS;
cooperative-intelligent transport systems)을 개발하고 있다.
C-ITS는 육상교통 환경에서 현재 도로구분이 가능한 차량 위 치결정 기술 수준을 넘어 차로구분이 가능한 위치결정 (Lane level positioning) 수준을 요구한다[1]. 주행차량의 차로 인식방 법으로 RFID (radio frequency identification), 카메라와 같은 도 로환경 설비를 이용한 방법들이 고려되었으나[2]-[4], 동작 범 위가 제한적이고, 유지보수로 많은 비용이 소요된다는 단점이 있다.
C-ITS가 요구하는 위치결정 성능을 만족하기 위해서 사용자 의 요구사항, 기존 시스템과의 호환성, 기술개발의 용이성, 구 축비용, 차세대 교통체계의 적합성 등을 고려하였을 때, 위성항 법 시스템이 효과적인 방법으로 고려되고 있다[5]. 전 세계적으 로 위성항법을 이용한 차량 위치결정 기술에 대해 많은 연구가 진행 중이나, 실제 주행환경에서 기술의 성능 평가, 검증은 대 부분 전체적인 주행 성능을 다루고 있으며, 동적이고 다양한 환 경을 기준으로 분류하여 평가하는데 한계가 있다[6].
본 논문에서는 위성항법시스템 기반 차로구분 정밀위치 결 정 성능을 평가를 위한 시스템과 교통, 도로와 같은 주행환경 에 따른 성능 분석을 위한 기준에 대해 설명하였다. 실제 시험 평가 구간을 주행하여 수집한 데이터를 바탕으로 수치적인 성 능 평가를 하였으며, 실제 주행 궤적과 주행영상의 비교를 통 해 실제 위치 결정 성능 평가를 수행하여 위성항법 기반 정밀 위치결정 사용자 시스템의 주행 환경에 따른 성능을 도출하고 분석 하였다.
Ⅱ. 정밀위치결정 사용자 성능 시험평가 시스템
본 장에서는 정밀위치결정 사용자의 동적환경에 대한 성능 평가 시스템에 대해 서술했다.
2-1 시험 평가 장비 구성
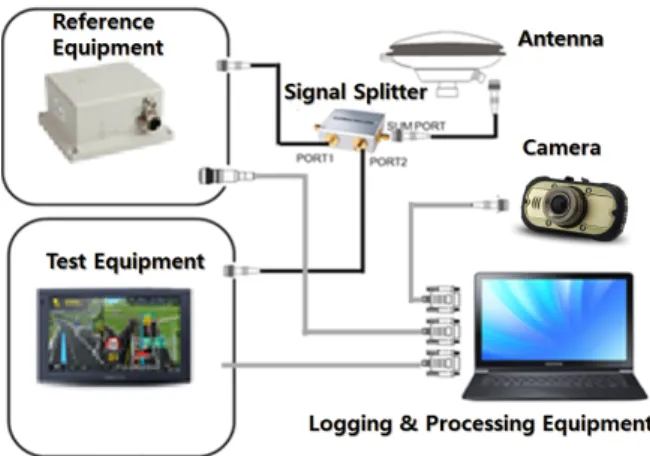
시험평가 장비의 구성은 그림 1 과 같다. 비교용 기준위치 획 득을 위한 기준장비, 정밀위치결정 평가 장비 위성항법 신호 수 신용 안테나, 기준장비와 평가장비에 동일 신호를 제공하기 위 한 신호 분배장치(signal splitter), 주행 시 주변 환경에 대한 정 보 획득을 위한 영상장치 그리고 주행 데이터의 기록과 분석을 위한 데이터 처리 장치로 구성된다.
그림 1. 시험 평가 장비 구성도 Fig. 1. Test equipments diagram.
2-2 사용자 시스템 성능 지표
사용자 시스템의 성능 평가를 위한 지표로 위치결정 정확성, 무결성, 가용성으로 선정하며, 표 1의 지표별 평가 방법을 통해 검증한다. 이를 위한 주요 수치에 대한 정의는 표 와 같다.
Performance
indicator Description
Accuracy
-Positioning horizontal RMSE (root mean square error) test.
RMSE
∥pk pk∥
-pk and pk are th each referenced, estimated positions, is total data number.
Integrity
- Integriry HMI (hazardously misleading information) event [HPL; horizontal protection level)≤AL; alert limit<HPE; horizontal positioning
error] incidence.
HMI
ℕ≤ m∥p p∥
-ℕis satisfied number of condition.
- is horizontal positioning error of user system.
- HMI event : If system can not only lane level position, but also alert
Availability
- Availability [HPE<HPL<AL] satisfied rate test
ℕ∥p p∥≤
×
표 1. 사용자 시스템 평가 지표
Table 1. User system performance indicators.
Category HPL HPE AL
Definition Horizontal protection level
Horizontal positioning
error∥p p∥ Alert limit (1.5 m) 표 2. 무결성 및 가용성 성능 분석 수치
Table 2. Integrity and availability analysis values.
2
517 www.koni.or.kr
Category Condition Percent
(%)
Transp ortation
Velocity
Smooth Greater than or 80
km/h 22.10
Slow 40~80km/h 37.51
Congesti
on Less than 40km/h 40.39
Driving lane
1st 22.36
2nd 44.87
3rd 32.77
Road
Side of obstructi ons
Barriers, Hills
Car is located right side of obstacles 10.24 High-rise
buildings
Near Seoul TG 2 km (Gungnae/Geumgo
k-dong, Sungnam city, GyeongGi-Do)
6.63
The rest 83.13
표 3. 사용자 평가 도로 & 환경 조건
Table 3. Conditions of user system evaluation.
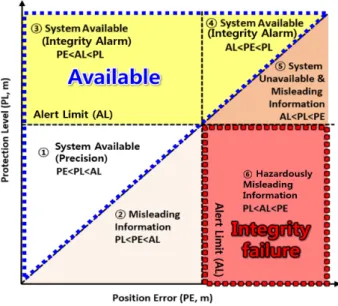
그림 2. 무결성 차트
Fig. 2. Integrity chart (The stanford diagram).
1) 위치결정 정확성
위치결정 정확성은 사용자 시스템의 수평위치오차(HPE;
horizontal position error)를 통해 평가하며, HPE는 한 위치 관측 치(샘플)에서 사용자의 위치결정 결과(추정 위치)와 기준 장비 의 위치결정 값의 차이로 정의한다. 일반적으로 국내 도로 환경 에서 차로의 폭은 3~3.5 m에 해당하므로[7], 차로구분을 위한 최소한 HPE 1.5 m 이내의 정확도가 필요할 것으로 예상되어, 차로구분을 위한 한계값(AL; alert limit)을 이와 같은 1.5 m로 결정하였다. 성능 평가 중 관측치의 HPE의 RMSE를 통해 위치 결정 정확성을 평가하며, 차로구분을 위한 정확도는 전체 관측 치의의 RMSE가 0.9(2σ, 95%) 이하일 경우 차로구분이 가능하 다고 판단하였다.
2) 위치결정 무결성
위성항법분야의 무결성은 항공교통에 활용되고 있으며[8], 사용자 자체적으로 위치결정 결과의 신뢰성을 판단하는데 목 적이 있다. 무결성 평가를 위해 정밀위치결정 시스템 사용자에 게 위치결정 보호수준(PL; protection level)을 제공해야하며, 육 상교통용으로 활용하기 위해 수평의 무결성만을 고려하였다.
위치결정 무결성은 사용자 시스템의 HPE의 예측값인 수평보 호수준(HPL; horizontal protection level)이 실제 오차 (∥p p∥)를 포함(∥p p∥≤)한다면, 무결성이 보 호된다고 판단하였으며, 실제 위치결정 오차보다 낮은 값으로 예측할 경우(∥p p∥)에는 무결성 보호에 실패한 것으로 판단하였다. 만약 무결성 보호에 실패하였으며, 사용자 의 실제 위치결정 오차가 사용자 차로구분이 불가능할 수준 일 때 (AL< HPE), HMI(hazardously misleading information) 상황 또는 무결성이 훼손되었다고 정의한다. 무결성 지표는 전체 관 측치 중 HMI 발생 비율을 기준으로 평가한다.
3) 위치결정 가용성
위치결정 가용성은 사용자 시스템이 차로 구분을 위한 무결 성 측면에서 경보 기능을 얼마나 활용 할 수 있는지의 확률로 정의하며, 가용여부는 시스템이 사용자에게 정확한 무결성 경 보 기능을 제공하여 수평 보호수준이 위치결정 오차를 포함 (∥p p∥≤)하는 경우를 나타내었다.
4) Stanford Diagram
Stanford Diagram은 관측치의 PE(position error), PL, AL 값 을 통해 해당 영역에 표시하여 무결성, 가용성 수치를 보여주는 차트이다. 그림 2와같이 Stanford Diagram의 각 영역을 통해 무 결성 및 가용성을 분석한다. 그림 2에서 ① 상황은 사용자 시스 템이 정상운용 되는 정상상태를 나타낸다. 사용자 관점에서 실 제 위치를 모르기 때문에 단순히 PL과 AL의 비교를 통해 가용 여부를 판단한다. 즉, 무결성 보호가 실패한 ②, ⑥ 상황에서도 사용자 관점에서는 가용 상태로 운용될 수밖에 없으며, ⑥ 영역 은 차로구분에 실패하였지만, 사용자는 이를 인지하지 못한 상
황이므로 발생확률을 최소화시켜야만 한다. 이 ⑥ 상황에 해당 되는 데이터 발생 확률을 통해 무결성 성능이 평가된다. 사용자 성능 평가 시스템에서는 사용자의 궤적 정보가 기준장비를 통 해 확보되어 있으므로, PL이 PE를 예측하여 무결성 보호 상황 인 ①, ③, ④ 영역에 해당하는 데이터 분석을 통해 가용성 지표 를 도출한다.
2-3 시험 평가 주행환경 조건 선정
성능 평가를 위한 주행조건은 주행속도, 주행차로와 같이 가 변인 조건을 반영하기 위한 교통 환경, 도로 변 장애물과 같은 가 주행 별 불변인 조건을 반영하기 위한 도로 환경으로 구분하 며, 이에 따른 주행 조건은 표 3과 같이 구성된다.
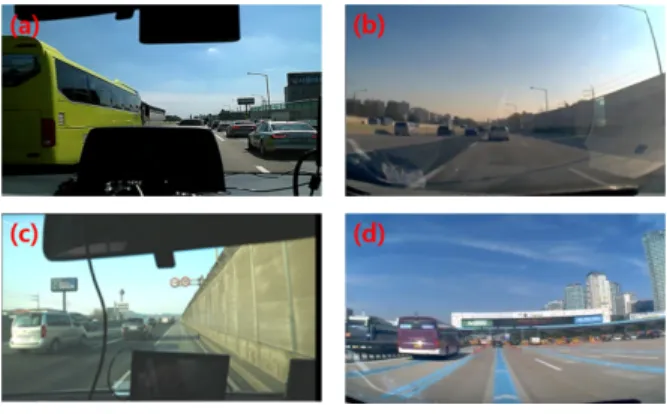
그림 3은 각 교통, 도로 환경 조건에 대한 예시 상황을 보인
그림 3. 교통 및 도로 환경 조건 별 상황 (a) 단속류, (b) 도로 최측면 주행, (c) 방음벽 주변, (d) 고층 빌딩 주변 Fig. 3. Transportation and road condition situations (a)
Interruption, (b) Driving by edge of road, (c) Side of barriers, (d) Side of High-rise buildings.
그림 4. 시험평가 구간 전체 위치결정 정확성 누적분포표 Fig. 4. Total accuracy CDF.
다. 교통 환경에는 주행속도별, 주행차로별 조건이 포함된다.
교통 환경 조건으로 연속류 및 단속류에 대한 평가를 위해, 주 행 속도를 원활 (80 km/h 이상), 서행 (80~40 km/h), 정체 (40~0 km/h) 구간으로 구분[9], 하여 주행 속도 별 성능을 평가한다.
최측면 차로에 가까울수록 도로 변에 위치한 장애물(방음벽, 언덕 등) 영향으로 위성항법 신호의 차폐 고도각 증가에 따라 위성항법 신호 수신율에 영향을 주어, 이로 인해 가시 위성 수, HDOP (horizontal dilution of precision)이 변화한다. 예로 3차로 도로에서 차로 당 도로 폭 3.5 m, 방음벽 높이 3 m, 차량 높이 1.5 m 기준 상황일 때 1~3차로별 최대 10˚, 16˚, 41˚의 위성항법 신호 차폐각이 발생한다. 이와 같이, 주행 차로에 따른 위치결 정 성능을 평가하기 위해 주행 차로를 구분하고, 속도별 성능을 확인하였다. 위와 같은 요인들은 매 주행 시 환경에 따라 변하 기 때문에 기준장비 및 정밀위치결정 사용자 단말기의 주행 속 도, 차로정보, 그리고 각 주행의 단말기 화면 및 주변환경 영상 을 참조하여 조건별 데이터를 분류하여 주행속도, 주행차로별 조건을 도출하였다.
도로 환경에는 주변 시설물 요인으로 도로 변 장애물인 방음 벽, 언덕, 고층건물이 해당된다. 도로변 장애물의 경우 크기와 위치가 다양하고, 주행 시 성능에 영향을 미치는 정확한 범위를 분류하는데 어려움이 따른다. 따라서 방음벽, 언덕의 경우, 주 행 차량의 주행 방향을 기준으로 우측면 90˚에 위치한, 높이 3 m 이상의 방음벽, 언덕이 위치하는 조건으로 제한하였으며, 고 층건물의 경우 고층 기준인 6층 이상 건물이 다수 밀집해 있는 경기도 성남시 궁내동, 금곡동(서울 TG (tollgate) 기준 하행 2 km까지)로 제한하였다. 위와 같은 장애물들은 주행을 반복하 더라도 위치 환경이 불변하기 때문에 사전에 수집한 주행 영상 과 로드 뷰 영상 확인을 통해 지도 상의 도로 장애물의 위치와 목록을 작성하여 각 장애물의 영향을 받는 구간을 분류하였다. 해당 구간의 위치 좌표와 각 주행의 단말기 화면 및 주변 환경 영상을 참고하여 조건 별 데이터를 분류하고, 구간 분류 프로그 램 적용을 위한 좌표를 획득하여, 최종적으로 도로 변 장애물
구간 조건을 도출하였다.
차로 별 위치결정 성능을 분석하기 위해 가능한 동일 차로를 유지하여 주행하되, 필요에 따라 공공도로 흐름에 맞춰 일반 주 행하도록 하였다. 주행 중 교통 및 도로 환경 정보 수집, 사전 조 사 후, 작성된 시험평가 도로 장애물 목록과 녹화된 주행 영상 을 비교, 분석하여 시간대별 주행 환경 조건 여부를 확인하였 다. 조건별 성능 영향과 통계적 유의성 분석을 위하여 시간대 별 조건 표를 작성 후, 데이터 필터링을 통해 조건별 성능 분석 을 수행하였다. 총 주행 횟수는 통계학에서 활용하는 sample size determination에 따라[10], 신뢰도 99.99%, 오차범위 0.5%
를 만족하기 위해 약 160,000개 이상의 샘플을 획득할 수 있도 록 선정하였다. 실제 주행은 수신주기 5 ㎐, 평가 구간 편도 20 회를 주행하여 약 200,000의 샘플 데이터를 수집 후 평가에 활 용하였다.
Ⅲ. 사용자 시스템 성능 평가 결과
사용자 시스템의 성능 평가 결과는 앞에 기술한 평가 시스템 에 기반 하여, 정확성, 무결성, 가용성을 평가한다. “차로구분 정밀 교통인프라 기술 실용화 연구”의 사용자 단말기 시스템 [11]에 기반하여 평가를 진행하였다. 개발한 성능 평가 툴을 통 해 평가를 진행하였으며, 보다 정확한 분석이 요구될 시, NovAtel社 Inertial explorer[12]의 RTK Mode와 MATLAB을 통 해 후 처리한 데이터를 참조하였다.
그림 4는 전체 주행에 대한 위치결정 정확성의 누적분포함 수 (CDF; cumulative distribution function)를 나타낸다. 수평위 치오차는 가우시안 분포 형태로 나타난 다는 것을 알 수 있으 며, 2σ (신뢰도 95%)에 대한 누적분포확률이 약 0.68 m에 위치 하고 있다. 그림 5는 전체 주행에 대한 위치결정 무결성, 가용성 성능 및 분포 결과를 보이기 위한 Stanford Diagram을 나타낸 다. Stanford Diagram의 정의에 따라 무결성, 가용성 결과를 계 산하면, 무결성 훼손율은 0.28*10-3, 가용성은 98.02 %로 나타 났다.
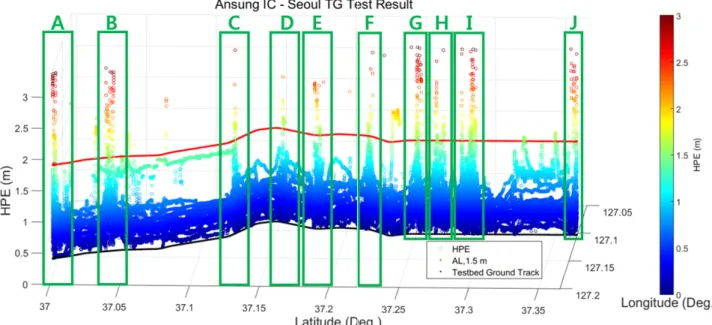
그림 6은 전체 주행에 대한 수평위치 오차를 도로 구간별로
519 www.koni.or.kr 그림 5. 시험평가 구간 전체 무결성, 가용성 성능
Fig. 5. Total integrity, availability performance result.
그림 6. 시험 평가 구간 별 위치결정 정확성 결과 Fig. 6. Each section accuracy performance result.
Section Driving image Map
naming
A Ansung
JC
H
Giheong- Dongtan
IC
J Seoul TG
표 4. 성능 저하 구간
Table 4. Performance degradation sections.
나타낸 결과이다. 각각 주행 별 수평위치오차를 공통 주행 구간 에 따라 표시하였다. A ~ J 로 표시된 주행 시 수평위치 오차가 증가되는 특정 구간은 위성항법신호 난 수신 환경 구간을 주행 하는 경우로 위성항법의 한계로 인하여 위치결정 성능이 감소 하였다. 성능 감소 구간을 영상과 기준장비의 좌표 값을 기준으 로 일반 지도를 통해 비교한 결과는 표 4와 같다. 구간 A, J 는 안성 IC (interchange)와 서울 TG의 도로변에 위치한 고층건물 및 톨게이트의 영향을 받는 경우며, 구간 B ~ I는 IC나 JC (junction) 부근의 고가도로 하단을 주행한 경우이다. 이와 같이
위성항법신호 난 수신 환경 구간을 주행하는 경우에 위성항법 의 한계로 인해 위치결정 성능이 감소함을 데이터를 통해 확인 하였다.
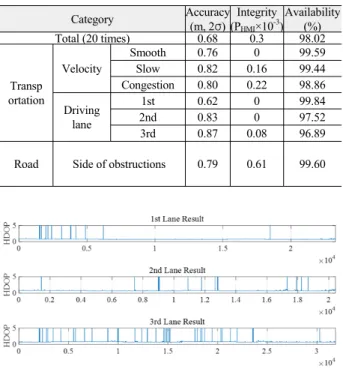
표 5는 시험평가 구간 주행 전체 데이터에 대한 위치결정 정 확성, 무결성, 가용성 성능 결과를 나타낸다. 2σ (약 95 % 범위) 가 0.68 m 에 위치하며, 무결성 훼손율은 0.28*10-3, 가용성은 98.02 %로 나타났다. 사용자 단말기 조건 별 성능 평가결과는
Category Accuracy (m, 2σ)
Integrity (PHMI×10-3)
Availability Total (20 times) 0.68 0.3 98.02(%)
Transp ortation
Velocity
Smooth 0.76 0 99.59
Slow 0.82 0.16 99.44
Congestion 0.80 0.22 98.86 Driving
lane
1st 0.62 0 99.84
2nd 0.83 0 97.52
3rd 0.87 0.08 96.89
Road Side of obstructions 0.79 0.61 99.60 표 5. 주행 환경에 따른 사용자 시스템 성능 결과
Table 5. Result of user system evaluation according to Driving condition.
그림 7. 시험 평가 주행 차로 별 HDOP Fig. 7. Each lane HDOP performance result.
모든 조건에서 목표 성능을 만족하였다. 위성항법의 성능은 속 도에 크게 영향을 받지 않기 때문에, 고속도로 환경에서의 주행 속도의 조건에 무관하게 차로구분이 가능하다는 것을 보여준 다. 주행 구간에 따라 위성항법 신호 수신율에 영향을 주는 가 시 위성 갯수, HDOP, 고도각이 변화함에 따라 위치결정 성능 에 영향이 존재하였다. 그림 7은 주행 차로 별로 HDOP를 그린 결과이다. 1차로에서 3차로로 이동할수록 도로 변의 장애물 영 향으로 위성항법 신호가 차단 각이 상승되어 HDOP 성능이 하 락되었다. 이처럼, 같은 구간의 주행이라도, 주행 차로에 따라 위성항법 신호 수신에 영향을 미치는 가시 위성 수, HDOP, 위 성 고도각이 변함에 따라 위치결정 성능에 주행 차로에 따른 영 향이 존재하며, 외곽 차로쪽으로 주행할수록 도로 변 장애물로 인한 성능 저하가 발생함을 알 수 있었다. 도로 변 장애물의 위 성항법 신호 차폐로 인하여 1차로 대비 3차로 주행 시, 정확도 0.25m, 무결성 훼손율 0.08*10-3, 가용성은 2.95% 저하되며, 위 성항법시스템의 한계에 따른 성능저하를 보여주었다.
Ⅳ. 결 론
본 논문에서는 위성항법 기반 차로 구분 정밀위치결정 사용 자 시스템의 주행환경에 따른 평가 조건을 제시하였고, 단일 안 테나를 이용하여 기준장비와 평가 장비에 동일한 위성신호를 수신한 뒤 후 처리된 위치결정 성능을 평가 하여 동적환경에서
의 주행 환경의 영향에 따른 정확성, 무결성, 가용성 성능 결과 를 확인, 분석하였다.
고속도로 환경에서 도로, 교통 환경 조건에 관계없이 위치결 정 정확도는 2σ, 0.9m 이하로, 적용된 시스템은 차로구분이 가 능함을 확인하였으며, 같은 구간의 주행이라도, 주행 차로 위치 나 차로의 위성 신호를 차폐하는 장애물, 환경 유무에 따라 위 성항법 신호 수신율에 영향을 주는 가시 위성수, HDOP, 위성 고도각이 변화하였다. 위성 신호 차폐의 영향으로 외곽차로로 주행할수록 도로 변 장애물로 인한 성능 저하가 발생함을 확인 하였다.
본 논문의 결과는 특정 평가 구간인 경부고속도로 서울TG- 안성IC 구간에 대한 성능 평가결과로서, 제한적이며, 차량이 주 행하는 주변 환경(위성항법 신호 차폐, 간섭 요인 유무)에 따라 성능은 차이가 있을 수 있다. 실험 결과는 비교적 개활지가 많 은 고속도로에서 실험하여, 난 수신 환경이 비교적 적다는 한계 가 존재한다. 따라서 추가적으로 일반 국도를 포함한 다양한 환 경에서의 성능 평가가 수행되어, 정밀위치결정 기술에 대한 성 능을 검증해야 한다. 또한 다양한 환경에서의 가용성 향상을 위 해 사용자 단말기는 IMU (Inertial measurement unit), 영상 등의 다양한 추가 센서 융합을 통한 복합 항법을 적용하는 등, 다양 한 환경에서도 차로구분 성능을 보장 하여 사용자 시스템의 가 용성을 향상시킬 수 있는 방안이 필요할 것으로 사료된다.
References
[1] E. S. Lee. J. I. Park, S. H. Im, M. B. Heo, and C. H. Yeom,
“Technical trend for performance improvement of GNSS based positioning in land transportation environment,”
Aerospace Industry & Technology Trends, Vol. 10, No. 1, pp. 179~195, Oct. 2012.
[2] FAA William J. Hughes Technical Center NSTB/WAAS T&E Team: Wide-area augmentation system performance analysis report, Federal Aviation Administration, Atlantic City: NJ, Report #66, Oct. 2018.
[3] G. Zhang and C. Wilson, “An integrated DGPS/DR/map system for vehicle safety applications,” in Proceedings of the 2000 National Technical Meeting of The Institute of Navigation, Anaheim: CA, pp. 253-257, Jan. 2000.
[4] J. Wanf, S. Schroedl, K. Mezger, R. Ortloff, A. Joos, and T.
Passegger, “Lane keeping based on location technology,”
IEEE Transaction on the Intelligent Transportation System, Vol. 6, No. 3, pp. 351~356, Sep. 2005.
[5] W. Y. Kang, E. S. Lee, J. I. Park, J. A. Han, W. K. Hong, H.
S. Kim, M. B. Heo, and G. W. Nam, “Performance analysis of road lane recognition using road condition constraint,”
The Journal of Korea Navigation Institute, Vol. 15, No. 3, pp. 432-440, Jun. 2011.
521 www.koni.or.kr [6] J. H. Lee, S. W. Lee, J. S. Ahn, Y. S. Choi and M. B. Heo,
“Performance analysis of GNSS based precise positioning transportation infrastructure user system using evaluation tool”, in 2018 IPNT Conference, Jeju: Korea, pp. 550-553, Apr. 2010.
[7] H. Kim, H. Lee, “Design and evaluation of a GNSS receiver network for lane-by-lane traffic monitoring” The Journal of Advanced Navigation Technology, Vol. 14, No. 2, pp.
151-160, Apr. 2010.
[8] European Space Agency, Navipedia [Internet]. Available:
https://gssc.esa.int/navipedia/index.php/Integrity
[9] Korea Expressway Corporation, [Internet]. Available:
http://www.roadplus.co.kr/introduce/faq/selectFaqList.do [10] Wikipedia, Sample size determination [Internet]. Available:
https://en.wikipedia.org/wiki/Sample_size_determination [11] Korea Aerospace Research Institute, A Study on lane-level
precise positioning infrastructure technology to practical use, Korea Agency for Infrastructure Technology Advancement, Anyang City, 11-B551959-000004-01, pp.
54-58, Mar. 2019.
[12] NovAtel, Inertial Explorer User Manual [Internet].
Available: https://www.novatel.com/assets/Documents/Way point/Downloads/Inertial-Explorer-User-Manual-870.pdf
이 정 훈 (Jung-Hoon Lee)
2013년 2월 : 단국대학교 전자공학과 (공학사) 2015년 2월 : 중앙대학교 전자전기공학과 (공학석사)
2015년 3월 ~ 현재 : 한국항공우주연구원 항법기술연구실 연구원
※ 관심분야 : 위성항법, 정밀항법, 신호처리
이 상 우 (Sangwoo Lee)
2009년 2월 : 아주대학교 전자공학부 (공학사) 2011년 2월 : 아주대학교 전자공학과 (공학석사) 2016년 2월 : 한양대학교 전자통신컴퓨터공학과 (공학박사) 2016년 4월 ~ 현재 : 한국항공우주연구원 항법기술연구실 선임연구원
※ 관심분야 : 위성항법, 정밀항법, 무선측위, 신호처리
안 종 선 (Jongsun Ahn)
2007년 2월 : 건국대학교 기계항공공학부 (공학사)
2009년 2월 : 건국대학교 항공우주정보시스템공학과 (공학석사) 2015년 8월 : 건국대학교 항공우주정보시스템공학과 (공학박사)
2015년 9월 ~ 2016년 12월 : 건국대학교 항공우주정보시스템공학과 박사 후 연수연구원 2016년 12월 ~ 현재 : 한국항공우주연구원 항법기술연구실 선임연구원
※ 관심분야 : 위성항법, 정밀항법, 무결성 임 성 혁 (Sunghyuck Im)
2003년 8월 : 건국대학교 전자공학과 (공학사) 2005년 8월 : 건국대학교 전자공학과 (공학석사) 2011년 8월 : 건국대학교 전자정보통신공학과 (공학박사)
2011년 12월 ~ 현재 : 한국항공우주연구원 항법기술연구실 선임연구원
※ 관심분야 : 항법신호 생성/처리, 실내측위, 항법신호 기만/교란, 항법센서 통합측위
천 세 범 (Se-Beom Chun)
2000년 2월 : 건국대학교 항공우주공학과 (공학사) 2002년 2월 : 건국대학교 항공우주공학과 (공학석사) 2008년 2월 : 건국대학교 항공우주공학과 (공학박사)
2010년 4월 ~ 현재 : 한국항공우주연구원 항법기술연구실 선임연구원
※ 관심분야 : 위성항법, 관성항법, 센서퓨전, 비선형 시스템 상태추정
허 문 범 (Moon-Beom Heo) 1992년 2월 : 경희대학교 기계공학과 (공학사)
1997년 12월 : Illinois Institute of Technology 항공기계공학과 (공학석사) 2004년 12월 : Illinois Institute of Technology 항공기계공학과 (공학박사) 2005년 10월 ~ 현재 : 한국항공우주연구원 항법기술연구실 책임연구원
※ 관심분야 : 위성항법, 정밀항법, 항행시스템