로봇을 이용한 교량검사 시스템 개발에 관한 연구
Bridge Inspection System using Robot
이 안 용 1 , 오 제 근 2 , 최 영 진 3
Anyong Lee 1 , Je-Keun Oh 2 , Choi Youngjin Choi 3
Abstract This paper proposes a bridge inspection system using a robot to manage the safety status of bridges. A conventional bridge inspection has a lot of problems because inspection is conducted manually by human. As an alternative, we are to develop a robot system having machine vision and this robot system is mounted on an end linkage of specially designed car having seven DOF (Degrees Of Freedom) to inspect cracks beneath bridge. This system is able to check a status of the bridge and record its changes every other year. As a result, the developed robot system offers us the inspection result of quality and reliability about the bridge inspection status. Also, we have tested the effectiveness of the suggested system through outdoor experiments.
Keywords : Bridge Inspection, Robot System, Safety, Automatic Inspection
그림 1. 지지대 위에서 교량을 검사하는 작업자
1. 서 론
1)다양한 자동화 로봇들의 개발로 인하여 산업분야의 응 용 기술은 많은 발전을 거듭하고 있다. 그러나 교량 안전 진단에 대한 자동화 시스템 및 로봇 기술은 낙후되어 있는 상황이다. 현재 교량 유지 및 관리는 열악한 환경에서 숙 련공들이 직접 조사한 정보를 통하여 수작업으로 진행되 고 있다
[1,2]
. 실질적으로 숙련공들은 교량 하부의 균열 수 를 확인하고 균열의 최대 크기를 측정하여 안전한 상태인 가를 점검하게 된다. 숙련공들은 작업을 통해 얻은 정보를 수집해 주관적인 판단으로 교량의 안전진단을 하므로 오 류를 범할 가능성이 크다. 또한 교량 안전진단은 점검자의 안전성 확보를 위하여 다양한 위험 요소를 제거할 필요성 이 있다. 안전장치와 안전기준의 부재는 교량 검사 현장에 서 재해를 유발하기도 한다. 그림 1은 지지대 위에서 작업 하는 작업자들의 위험성을 보여준다.그러므로 작업 환경의 개선과 기술 혁신을 통한 검사자 의 안전성 확보가 교량 검사에 있어서 가장 중요한 고려사 항 중의 하나가 되고 있다. 이러한 점을 개선하고 보완한 다는 측면에서 검사 로봇은 접근하기 어려운 위치나 위험
Received: Feb. 2, 2010; Reviewed: Feb. 19, 2010; Accepted: Feb. 22, 2010
※ 본 연구는 지식경제부 융복합형로봇전문인력양성사업에 의하여 연구 되었음.
1 한양대학교 대학원 전자전기제어계측공학과 박사과정
2 한양대학교 연구원
3 한양대학교 공학대학 전자시스템공학과 조교수
한 지역에서 로봇에 장착된 센서 및 영상 정보를 통하여 조종자들에게 보다 더 안전하고 정확한 정보를 제공해 줌 으로써 이러한 정보를 보다 효율적으로 사용할 수 있게 해 준다. 예를 들면 해외에서는 수중에 있는 교량 교각을 조 사하기 위한 로봇 시스템이 개발되고 있다
[3]
. 또한 다른 형 태의 탐사로봇으로 진공을 가진 휠 구동 메커니즘으로 구 성된 로봇들이 제안되었다[4,5,6]
. 특히 본 논문은 로봇을 이 용한 교량 검사 시스템을 제안하며, 교량검사 시스템에 장 착되는 머신 비전 시스템[7]
은 교량 하부의 이미지로부터 크랙의 길이와 폭 등의 정보들을 추출해 낼 수 있도록 개 발되고 있다. 국내에서의 유사연구로는 유조선 검사로봇 을 제안한 사례가 있다[12]
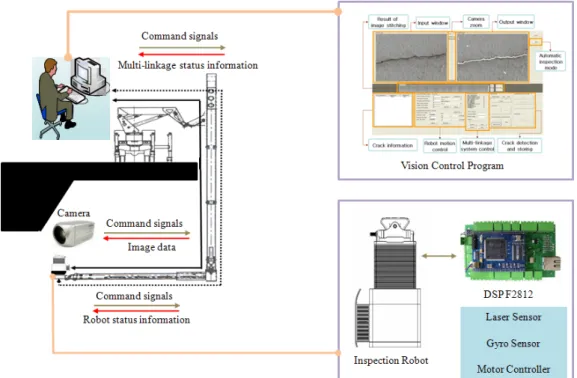
.그림 2. 교량검사를 위한 전체 시스템 그림 4. 교량검사 로봇 메커니즘 그림 3. 다관절 시스템의 동작 순서 본 논문은 다음과 같이 구성되었다. 2장에서는 교량검
사로봇 메커니즘과 제어시스템을, 3장에서는 전체시스템 의 통합방법을, 4장에서는 실험 결과를 보여준다. 마지막 5 장에서는 본 논문의 결론을 기술한다.
2. 교량검사로봇 메커니즘과 제어시스템
그림 2는 로봇을 이용한 교량검사 로봇의 전체적인 시 스템을 보여준다. 전체 시스템은 특장차, 다관절 (multi‐
linkage) 시스템 그리고 검사로봇(inspection robot)으로 이루 어진다. 검사로봇은 다관절 시스템의 말단에 장착된다. 넓 은 교량 하부를 정밀하게 조사하기 위하여 특장차의 조작 자는 교량 하부까지 다관절 시스템을 조작하여 교량검사 로봇의 위치를 이동시킬 수 있다.
특장차의 디관절 시스템은 수동모드와 자동모드에 의해 접고 펴는 것이 가능하도록 설계되었다. 이 시스템은 처음 조작자가 수동으로 다관절 시스템을 교량 하부로 펼치게 되면 각 구동 관절들의 위치 정보들을 저장할 수 있다. 다 관절 시스템의 펼쳐지는 동작 순서는 그림 3과 같고 접히 는 동작 순서는 정반대이다. 교량하부의 한 곳을 검사한 후 다관절 시스템을 접고 위치를 옮겨 조작자가 자동모드 를 선택하면 다관절 시스템은 수동모드였을 때의 각 구동 관절들의 해당 위치정보들을 불러와 자동으로 펼쳐지게 된다.
개발된 다관절 시스템은 7자유도를 가지며 각각 유압방 식의 구동모터들에 의해 동작된다. 동작 순서에 따르면, 첫 번째 회전관절 유압모터는 특장차의 앞쪽으로부터 다 관절 시스템을 들어 올린다. 두 번째, 세 번째 그리고 네 번째 회전관절 유압모터들은 다관절 시스템을 교량의 옆 쪽으로 회전시킨다. 각 교량들은 각각 두께가 다르기 때문
에 다섯 번째 직진관절 구동 유압모터는 검사로봇이 교량 하부의 크랙(crack)을 쉽게 측정할 수 있도록 교량 하부와 검사로봇 사이의 거리를 일정하게 맞춘다. 여섯 번째 회전 관절 유압모터와 일곱 번째 직진관절 유압모터는 교량하 부에서 검사로봇이 최대한 넓게 측정할 수 있도록 설계되 었다.
그림 4에서 제시된 것과 같은 검사로봇은 머신비젼 시 스템
[7]
의 팬/틸트(pan/tilt) 동작을 위한 회전부분과 중력방 향의 움직임을 위한 상하(up/down)동작 부분으로 이루어진 다. 또한 팬/틸트 기구부에는 자이로(gyro) 센서, 레이져 (laser) 센서, 크랙 측정을 위한 카메라(camera)가 장착되어그림 5. 로봇의 2단 구조 메커니즘
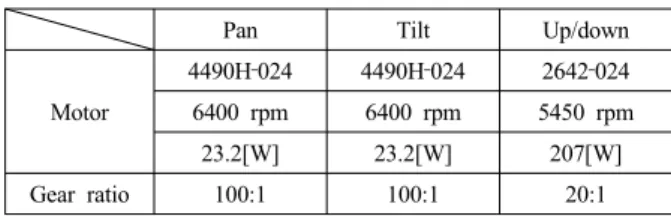
Pan Tilt Up/down
Motor
4490H‐024 4490H‐024 2642‐024 6400 rpm 6400 rpm 5450 rpm
23.2[W] 23.2[W] 207[W]
Gear ratio 100:1 100:1 20:1
표 1. 검사로봇에 사용된 모터의 사양.
그림 6. 제어시스템의 블록다이어그램 있다. 상하운동 기구부는 그림 5에서 보여지듯이 텐던‐구
동 방식(tendon‐driven method)에 의한 2단 구조의 동작을 만들어 낸다. 2단 구조의 기구부는 머신비젼 시스템을 교 량하부의 표면에 최대한 가까이 도달하도록 만들어주며, 그 최대 확장 길이는 1[m]이다. 이 확장 길이는 교량 하부 의 정교한 크랙 이미지를 얻어내기 위함이며, 그로 인하여 크랙의 길이와 폭을 더욱 정밀하게 계산할 수 있게 된다.
실재 교량 하부의 환경은 일정하지도 않고 제어하기도 힘들다. 예를 들어 교량에 자동차가 지나가게 되면 외란이 발생하게 되고, 그 외란은 특장차의 다관절 시스템에 진동 을 야기시킨다. 또한 다관절 시스템의 말단은 최대 12[m]
까지 확장되기 때문에 자체적인 무게로 인하여 확장 시 다 관절 시스템에 처짐(deflection)이 발생된다. 이렇게 처지게 되면 교량 하부의 크랙을 정밀하게 측정하기 어려워지는 문제점을 가지게 된다. 이에 대응하기 위하여 그림 4와 같 이 검사로봇에 레이져 센서와 자이로 센서를 부착하여 외 란에 관계없이 절대 방향각 및 상대 거리를 얻어내어 머신 비젼시스템
[7]
과 교량 하부 사이의 정확한 거리를 유지하도 록 제어할 수 있으며 자세한 제어 방법은 참고문헌 [11]을 통해 제시되었다. 자이로센서는 팬/틸트 기구부에 의하여 일정한 roll(pan)과 pitch(tilt)좌표를 유지하기 위하여 사용 되었다. 일정한 절대 방향각을 유지하기 위해서 팬/틸트 동작은 최대한 빠르게 제어되어야 한다. 그렇기에 우리는 표 1과 같이 6400[rpm] DC 모터와 100:1 기어비를 가진 하 모닉 드라이브를 선택하였다.앞에서 언급했듯이 정교한 크랙 측정을 위하여 로봇의 상하운동 기구부는 교량 하부의 측정 지점까지 머신비젼 시스템을 2단 구조를 이용하여 이동시킨다. 2단 구조의 기 구부는 모터의 수와 무게를 줄여야 효율적이기 때문에 1[m]까지 이동시킬 수 있도록 1개의 5450[rpm] BLDC 모터
를 이용하였다.
그림 6은 팬/틸트 구동과 상하운동 구동을 위한 제어 알 고리즘을 보여준다. 비선형 PD (nonlinear proportional plus derivative) 제어기는 빠른 팬/틸트 구동을 위하여 사용되었 으며, 선형 PID (linear proportional plus integral plus derivative) 제어기는 정교한 상하운동 제어를 위하여 사용 되었다
[8,9,10]
.첫 번째로, 그림 6에서 팬 구동의 선형 오차를 다음 식 과 같이 정의한다.
pan pan d
pan q q
e =
,−
(1)여기서
q d , pan
는 목표 팬 방향각이며,q pan
는 자이로 센서에 의해 측정된 실제 팬 방향각이다. 우리는 알려지지 않은 외란에 대해서 머신비젼 시스템이 일정한 절대 방향 각을 유지하기 위해 빠른 팬 구동을 원하기 때문에, 다음 식과 같이 식 (1)을 이용하는 새로운 비선형 오차를 이용 하였다.pan pan
pan e e
x
= (2)식 (2)의 비선형 오차는 다음과 같은 목적으로 사용된 다. 큰 오차에 대해서는 식(2)의 비선형 오차가 선형 오차 보다 큰 값을 가지며 작은 오차에 대해서는 비선형 오차가
그림 7. 전체 시스템을 관리하는 서버 컴퓨터 선형오차 보다 상대적으로 작은 값을 가진다. 위의 식(2)의
비선형 오차에 대해서 PD 제어기를 적용하였다. 이것은 본 논문에서 비선형 PD 제어기로써 언급되었다. 만약 오 차가 크다면 제시된 비선형 PD 제어기는 목표 팬 방향각 을 회복하기 위한 빠른 팬 구동을 보여준다, 또한 만약 오 차가 작다면 비선형 PD 제어기는 이미지 번짐(blurring)을 최소화하기 위하여 상대적으로 느린 구동을 보여준다. 이 렇게 비선형 PD 제어기를 이용하여 우리는 선형 PD 제어 기를 사용할 때보다 더 효율적인 카메라 이미지를 얻을 수 있다. 팬 운동에 사용된 이 방식은 틸트 운동에도 똑같이 적용된다.
두 번째로, 선형 PID 제어기는 그림 6과 같이 상하 구동 을 위해 사용된다. 여기서 적분 제어기는 중력 보상을 위 하여 PD제어기에 추가되었다. 중력에 기인한 것과 같은 일정한 외란은 [10]에서 보고되었듯이 적분제어기를 사용 함으로써 보상될 수 있다. PID 제어기의 목적은 교량 하부 와 머신비젼 시스템 사이의 일정한 거리를 유지하는 것이 며, 최종적으로는 알려지지 않은 외란으로부터 정밀한 크 랙 이미지를 얻어내기 위함이다. 본 PID 제어기의 안정성 은 증명은 참고문헌 [10]에 제시되었듯이 외란 입력에 대 한 오차 상태에 이르는 상대 안정성을 갖는다. 또한 PD 및 PID 제어 이득 설정 방법은 참고문헌 [10]에 따라서 적용 되었다. 제안된 제어 시스템을 구현하기 위해서 우리는 150[MHz]의 속도로 데이터를 처리하는 마이크로프로세서
인 DSP F2812 (manufactured by TI Co.)를 이용하여 제어보 드를 개발하였다. 이 마이크로프로세서는 CAN, SCI, ADC 와 같은 다양하고 유용한 기능들을 제공해준다. 또한 CAN 과 SCI 통신은 서버 컴퓨터가 전체 시스템을 관할하기 위 하여 데이터를 주고 받기 위하여 필요하다. 추가적인 설명 은 다음 장에서 다루고자 한다.
3. 시스템 통합 및 작업계획
3.1. 시스템 통합
다관절 시스템, 검사로봇, 머신비전 시스템은 특장차 안 에 장착되는 서버 컴퓨터를 통해 통합 제어되어야 한다.
또한 전체 관리자로써 서버 컴퓨터는 그림 7과 같이 실시 간으로 모든 기능들을 제어해야 한다. 첫째, 서버 컴퓨터 는 7자유도 다관절 시스템을 구동하기 위하여 구동 명령 신호를 다관절 시스템으로 보내고 SCI통신을 통하여 동작 상태 데이터를 받는다. 둘째, 서버 컴퓨터는 명령 신호를 3 자유도의 검사 로봇으로 보내고 난 후 CAN통신을 통하여 동작 상태 데이터를 받는다. 셋째, 서버 컴퓨터는 RS485통 신을 통하여 머신비전 시스템에 영상을 얻어내기 위해 명 령 신호를 보내고 난 후 BNC 케이블을 통하여 영상 (640x480)데이터를 받는다. 마지막으로 서버컴퓨터의 전체 관리 프로그램은 동작 제어 시스템과 머신비젼 시스템을 포함한다. 그래서 전체 관리 시스템을 통하여 작업자는 전
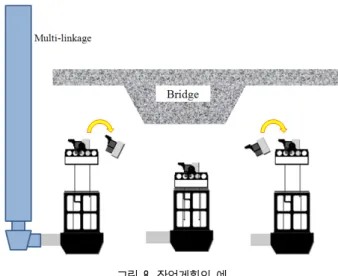
그림 8. 작업계획의 예 체 동작 제어 시스템을 구동시킬 수 있고, 실제 교량 하부
의 크랙 영상을 볼 수 있으며 운전석에 장착되는 서버 컴 퓨터를 통해 법령에 의해 격년으로 작성해야 하는 검사 작 업일지를 위한 데이터베이스를 만들 수 있다.
제안된 교량 검사로봇 시스템은 자동 검사 모드와 작업 자에 의해 수행되는 수동 검사 모드를 동시에 가진다. 자 동 모드를 통하여 영상 추출과 데이터 베이스 구축까지 작 업자의 역할이 최소화 되긴 했지만, 긴급 상황 시 시스템 을 중단시켜야 하는 경우에는 작업자의 부분적인 역할이 요구된다. 수동 검사 모드에서 작업자는 서버 컴퓨터의 관 리 프로그램을 통해서 머신비젼 시스템을 포함한 전체 로 봇 시스템을 원격 제어할 수 있다. 처음 단계에서 앞 장에 서 설명된 방식으로 7자유도 다관절 시스템을 교량 하부 로 구동시킨다. 두 번째 단계에서는 교량 하부에 보내어진 다관절 시스템의 마지막 직진관절 구동기를 일정한 속도 를 가지고 펼쳐진다. 이를 통해 검사로봇은 번짐 없는 크 랙 영상을 추출하기 위하여 교량과 머신비젼 시스템 사이 의 일정한 방향각과 거리를 유지할 수 있도록 제어된다. 또한 추출된 영상은 [7]에서 제안된 크랙 검출 알고리즘을 사용하여 자동으로 진행되며, 데이터베이스에 획득된 영 상을 정합하여 파노라마 영상으로 제작한 후 CAD 파일로 변환되어 저장된다. 비록 이 진행과정이 작업자의 관리하 에 자동모드로 수행되지만, 만약 작업자가 모든 부분을 수 동으로 하려고 할 경우에는 원격 제어를 통해서 모든 기능 을 수동으로 제어 가능하도록 개발되었다.
3.2. 작업 계획
모든 교량은 각각 모양이 다르기 때문에 작업계획은 실 제 교량검사 수행 전에 이루어져야 한다. 교량 안전검사를 위한 작업계획의 목적은 깔끔한 본래의 영상을 추출해내 기 위함이다. 이것을 위해서 교량하부의 표면과 머신비젼 시스템 사이의 거리는 일정하게 유지되어야 한다. 또한 머 신비젼 시스템은 일정한 화질을 보장하기 위해서 교량하 부에 항상 수직으로 유지되어야 한다.
작업계획의 한 예로 우리는 그림 8에서처럼 교량하부의 도면을 가지고 진행하였다. 검사되는 교량의 도면을 분석 한 후 교량 하부의 모양이 변화되는 특징점을 확인한 후 검사 포인트를 위한 위치를 결정하였다. 실제 실험에서는 다관절 시스템의 마지막 구동관절이 일정한 속도로 펼쳐 지는 것에 따라서 레이져 센서에 의해 측정된 거리에 의해 이 특징점들이 비교된다. 특징점에 따라서 머신비젼 시스 템의 팬/틸트 방향각과 교량 하부와 머신비젼 시스템 사이 의 거리는 그림 6에서 제시된 제어 방식을 적용하였다. 해 당 제어기는 번짐 없는 영상과 일정한 영상 화소를 유지하
기 위하여 특징점에 따른 목표 방향각들을 미리 설정한 후 자이로 센서와 레이져 센서를 사용하여 그림 8과 같은 검 사 작업을 계획하게 된다.
또한, 설계된 검사로봇의 상하 동작의 최대 거리는 약 1[m]이기 때문에 레이저 센서를 이용하여 일정한 거리를 유지하기 위한 제어를 적용하였다. 하지만 어떤 교량은 그 범위를 넘을 수도 있다. 그러한 경우는 일정한 화소를 유 지하기 위해서 미리 초점거리를 계획하고 적용시켜야 한 다. 이것은 자동 탐사 모드에서 작업자의 수고를 최소화하 기 위하여 매우 중요하게 작용하는 부분이다. 이 다음 장 에서는 제안된 전체 교량 탐사 로봇 시스템의 실효성을 보 여주기 위한 실험 결과를 제시한다.
4. 실험 결과
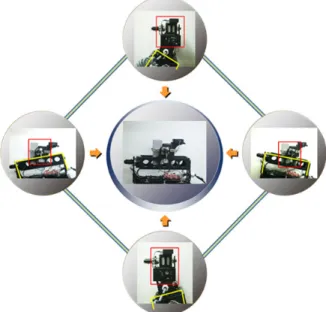
외부 현장 실험을 위해 그림 9와 같이 검사로봇에 mock
‐up을 설계하여 장착하였다. 개발된 검사로봇의 전체 무게 는 약 25[Kg]이다. 첫 번째 실험으로써, 그림 10과 같이 외 란으로부터 머신비젼 시스템이 목표 방향각을 유지할 수 있는지에 대한 제어 성능 실험을 수행하였다. 카메라 방향 각 제어는 그림 6에서 제안된 비선형 PD 제어기를 적용하 였다. 그림 10에서 보여지듯이 팬/틸트 기구부와 제어 시 스템은 기본 플랫폼을 임의로 움직여도 일정한 목표 방향 각를 유지할 수 있었다. 각각 제어시스템의 정상상태에서 의 오차는 약 0.05[deg] 정도 유지되지만 작업 환경에 따라 일시적인 큰 오차를 보이기도 한다. 그림 11은 방향각 제 어 성능 실험에 대한 실험결과를 보여준다. 목표 방향각을 계단방식으로 변경하여도 적용된 비선형 PD 제어기는 좋 은 성능을 보인다는 것을 실험을 통해 확인할 수 있다.
두 번째 실험으로 그림 12와 그림 13에서와 같이 실제 교량하부에서 제안된 교량검사 시스템을 실험하였다. 이
그림 9. Mock‐up후 검사로봇의 외관
그림 10. 카메라의 일정한 방향각 유지
그림 11. 계단 방식의 목표 방향각 변경에 따른 제어 성능 실험
첫 번째 지지대에서
두 번째 지지대에서 그림 12. 실제 교량에서의 적용 실험
그림 13. 구‐행주대교에서의 적용 실험 는 실제 교량 적용실험으로 두 곳의 교랑에서 실험을 하였
는데 한 곳은 그림 12와 같이 정부의 허가 없이 실험이 가
능한 한양대학교의 작은 사이즈 교량이며, 다른 한 곳은 그림 13에서와 같이 정부의 허가를 받아 실험한 경기도의 구‐행주대교이다. 작은 사이즈의 교량은 4개의 지지대를 가지고 있다. 여기서 3가지 항목을 가지고 실험을 수행하 였다. 첫 번째, 실제 작업 계획에 따라 레이져 센서를 이용 하여 실제 거리를 측정하고 이를 이용하여 선형 PID 제어 기를 적용하여 교량 하부와 머신비전이 일정한 거리를 유 지할 수 있는가를 확인하였다. 두 번째, 머신비전 방향각 제어 시스템이 지지대에서 크랙을 정면에서 검출하기 위 하여 동작 계획에 의한 목표 방향각을 유지할 수 있는가를 확인하였다. 세 번째, 머신비젼 시스템이 200[ms]의 처리시 간을 가지고 실시간으로 크랙을 검출할 수 있다는 것을 확 인하였다.
세 번째 실험으로 그림 14에서 보여지듯이 실시간 크랙 검출과 영상정합의 결과를 보여준다. 본 교량 검사시스템 의 성능을 검증하기 위하여 먼저 실험을 수행하기 전에 교 량 전문가로 하여금 교량 하부의 크랙을 정밀 검출해 보도
그림 14. 크랙 검출과 영상 정합
록 하였다. 교량 전문가는 자신의 눈으로 최고 폭이 0.2[mm] 이상인 184개의 크랙을 검출하였다. 다음으로 제 안된 교량 검사 시스템을 이용하여 교량 하부를 검사하였 으며 그 결과를 비교해 보았다. 제안된 시스템으로 검사한 결과는 작업자가 검출한 184개 이외에 178개를 추가로 검 출하였다. 제안된 시스템은 폭이 0.023[mm] 이상인 거의 모두 크랙을 검출하였다. 또한 그림 14에서와 같이 실험이 진행되는 동안 점검자는 영상제어 프로그램을 통해 검출 되는 크랙의 영상, 크랙의 폭과 길이 그리고 영상정합의 결과를 실시간으로 확인할 수 있다.
5. 결 론
현재까지 교량 안전 진단은 수작업으로 수행되고 있다. 이에 대한 대안으로 교량 검사로봇 시스템을 개발하였으 며, 현장 적용실험을 통해 일정 부분의 가능성은 확인하였 다. 또한 개발된 시스템은 교량 관리시스템에 로봇 동작제 어를 사용하여 일정한 수준의 교량 하부 영상을 획득할 수 있으며, 이를 이용하여 교량 안전진단 보고서를 작성할 수 있도록 개발되었다. 제안된 교량검사 시스템은 특장차, 로 봇 기구부와 제어시스템, 크랙 자동 검출을 위한 머신비젼 시스템으로 구성되었으며, 각 부분 시스템의 성능은 검증 되었다. 하지만 실용화를 위한 추가 연구개발이 필요하다.
참 고 문 헌
[1] Federal Highway Administraion (FHWA), Bridge Inspection’s Training Manual, July, 1991..
[2] Bridge Maintenance Training Manual, US Federal Highway Administration, FHWA‐HI‐94‐034, prepared by Wilbur Smith Associates, 1992.
[3] J.E. De Vault, “Robot system underwater inspection of bridge piers”, IEEE Instrumentation and Measurement
Magazine 3, pp. 32–37,Sept, 2000.
[4] F. Xu and X. Wang, “Design and experiments on a new wheel‐based cable climbing robot”, IEEE/ASME
International Conference on Advanced Intelligent Mechatronics, pp. 418‐423, Jul, 2008.
[5] L. Briones. P. Bustamante and M. A. Serna, “Wall‐
climbing robot for inspection in nuclear power plants”,
IEEE International Conference on Robotics and Automation, pp. 1409‐1414, 1994.
[6] G. L. Rosa, M. Messina and G. Muscato, “A low‐cost lightweight climbing robot for the inspection of vertical surfaces”, Mechatronics, vol. 12, no. 1, pp. 77‐
96, 2002.
[7] J‐K. Oh, G. Jang, H. Lee, S. Oh, S‐C. Lee, Y. Choi, B‐J. Yi and H. W. Yang, “Robotic system for searching cracks beneath bridge”, 5th International
Conference on Ubiquitous Robots and Ambient Intelligence (URAI2008), Nov, 2008.
[8] B. C. Kuo and F. Golnaraghi, Automatic Control Systems, 8
th
Edition, Willey, 2002.[9] K. Ogata, Modern Control Engineering, 4
th
Edition, Prentice Hall, 2002.[10] Y. Choi and W. K. Chung, PID Trajectory Tracking Control for Mechanical Systems, Springer Publiching Co. as Lecture Notes in Control and Information Sciences (LNCIS Series No. 298), 2004.
[11] J‐K. Oh, G. Jang, S. Oh, J. H. Lee, B‐J. Yi, Y. S.
Moon, J. S. Lee, and Y. Choi, “Bridge Inspection Robot System with Machine Vision”, Automation in Construction, vol. 18, No. 7, pp. 929‐941, Nov., 2009.
[12] 이승희, 손창우, 엄용재, 이민철, “유조선 상태평가계 획 검사를 위한 이동로봇의 개발”, 로봇학회 논문지, 제2권, 2호, 161‐167페이지, 6월, 2007.
이 안 용
2006 선문대학교 기계및제어 계측공학과(공학사) 2009 한양대학교 전자전기제
어계측공학과(공학석사) 현재 한양대학교 전자전기제 어계측공학과(공학박사 과정)
관심분야 : 시스템 제어, 로봇제어
오 제 근
2006 영동대학교 전자공학과 (공학사)
2009 한양대학교 전자전기제 어계측공학과(공학석사) 현재 한양대학교 연구원 관심분야 : 햅틱스, 원격제어
최 영 진
1994 한양대학교 정밀기계공 학과(공학사)
1996 POSTECH 기계공학과 (공학석사)
2002 POSTECH 기계공학과 (공학박사)
2002~2005 KIST 지능로봇연구센터 선임연구원 2005~현재 한양대학교 전자시스템공학과 조교수 관심분야 : 재활로봇, 로봇제어


![그림 14. 크랙 검출과 영상 정합 록 하였다 . 교량 전문가는 자신의 눈으로 최고 폭이 0.2[mm] 이상인 184개의 크랙을 검출하였다](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5337206.393175/7.892.97.424.140.364/검출과-하였다-전문가는-자신의-눈으로-이상인-크랙을-검출하였다.webp)
