공학(Engineering)이란‘인류의 천연자원을 인간에 게 이익이 되도록 최적(最適)으로 바꾸기 위해 과학을 응용하는 학문’으로 정의할 수 있으며, 다양한 과학 지식의 응용 과정을 수행하는 공학인에게 창의적인 문제 해결 능력과 전공 기술에 대한 실행 능력은 매우 중요한 요소라고 할 수 있다. 이러한 능력의 중요성에 대한 교육 분야의 인식 변화를 반영하듯 국내 다수의 대학에서 도입하고 있는 공학교육인증 기준에서는 기 존의 과정 이수보다는 수행 능력을 평가 기준으로 삼 고 있으며, 직업교육 중심의 교육과정에서도 미국의 직업교육 분야에서 널리 사용되는 DACUM/ SCID와 같은 능력 중심의 교육을 위한 직무분석 및 교육과정
개발 방법이 도입된 바 있다. 이와 같이 학생들의 창 의적 문제 해결 능력과 전공 기술의 실행 능력을 교육 과정에 반영하고자 다양한 교육용 기자재와 재료를 이용한 과제 해결 방식의 프로젝트 과목들이 개발되 었는데, 그 내용과 주제가 다양하게 구성될 수 있다.
교육용 기자재를 이용한 프로젝트
창의공학 프로젝트의 널리 사용되는 교육용 기자재 중의 하나는 레고 마인드스톰(Lego Mindstorm)인데, 베이스 및 리소스 세트에서 총 1,200여 개의 부품을 이용하여 다양한 형태의 기구 및 구조물을 제작할 수
김 영 흡ㅣ 동양미래대학교 기계과 교수 ㅣ e-mail : [email protected]
이 글에서는 교육용 기자재 및 기계 설계, 가공, 제작 방법 등을 효과적으로 이용하는 과제 해결 방식의 교육 사례 를 소개하고, 이를 통하여 기계 분야에서 실습을 중심으로 하는 창의공학 프로젝트 교육에 대한 내용을 제시하고 자 한다.
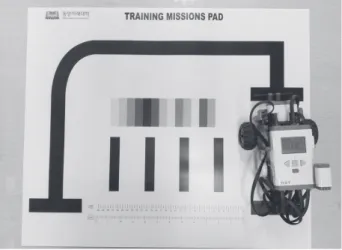
그림 1레고 마인드스톰 시스템(Lego Mindstorm System) 그림 2로봇 미션 패드
며, 최근 Matlab/Simulink에서도 블록을 개발하여 손 쉽게 중급 이상의 제어기의 개발이 가능하도록 지원 하고 있다.
본교 기계과에서는 1학년 학생들을 대상으로 공학 에 대한 흥미 유발 및 임베디드 프로그래밍의 기본 개 념 학습을 위하여 레고 마인드스톰(Lego Mindstorm) 을 도입하여 수업에 활용하고 있다. 1학년 학생들의 경우 프로그래밍에 대한 경험이 부족하고 텍스트 기반 의 프로그래밍보다는 그래픽 기반의 프로그래밍에 흥 미를 가지는 것을 감안하여 Labview 및 이를 기반으로 개발된 Robolab으로 로봇의 제어 프로그램을 작성한 다. 그림 2는 수업 초기에 사용되는 미션 패드인데, 빛 센서 및 컬러 센서의 디지털 값, 초음파 센서의 감지 거리, 엔코더의 회전과 바퀴 회전에 의한 진행 거리 등 을 확인할 수 있도록 제작된 것이다. 또한, 빛센서에 의한 라인 트레이서를 간단하게 확인해 볼 수 있는 라 인과 교차선 등이 인쇄되어 있어 경기장에서의 주행 이전에 기본 알고리즘을 테스트할 수 있도록 한다.
학습 방법은 기본 형태의 로봇을 제작하여 빛센서, 초음파센서, 터치센서, 소리센서, 엔코더 및 서보모터 등에 대한 학습은 학습하고, 이후에는 다수의 부품을 활용할 수 있는 과제를 부여하고 창의적인 방법으로 이를 해결하도록 하고 있는데, 다음은 그 예를 나타내 고 있다.
그림 3의 포켓볼 과제에서는 소프트웨어를 탑재시 킨 로봇을 이용하여 제한된 시간 내에 공의 색상을 인 식하여 해당 색상의 골인 지점에 공을 최대한 많이 넣
는 것을 목표로 한다. 경기 시간은 2분이고 로봇의 크 기는 출발 전 기준으로 가로×세로×높이가 250×250
×250mm 이하이며, 경기장에 놓이는 공의 색깔 및 위 치는 평가 당일 결정하여 임의의 색상에 대하여 과제 를 수행할 수 있도록 한다.
포켓볼 과제에서는 라인트레이싱을 기본으로 하고 공을 잡을 수 있는 기구와 빛 센서 또는 컬러 센서를 이용하여 공의 색상을 판별하는 것이 중요하다. 또한 특정 색상의 공을 원하는 위치에 넣은 후 현재의 로봇 위치를 판단하고 자세를 조정할 수 있도록 하는 등 제 어 알고리즘과 소프트웨어에 중점을 둔 과제이다.
그림 4의 씨름 과제에서는 소프트웨어를 탑재시킨 로봇을 이용하여 라인 트레이싱을 통해 지정된 씨름 경기장 안에 도착한 후, 상대방의 로봇을 검은 원 밖으 로 밀어 내어 떨어뜨리는 것을 목표로 한다. 로봇 포 켓볼 과제와 마찬가지로 경기 시간은 2분이고 로봇의
그림 3포켓볼 과제
그림 4씨름 과제
크기는 출발 전 기준으로 가로×세로×높이가 250×
250×250mm 이하인데, 로봇의 무게가 1kg 이하이고 비긴 경우 무게가 가벼운 로봇이 이기는 것으로 한다.
씨름 과제에서는 라인트레이싱을 기본으로 하고 있 으며 검은색 바탕과 흰색 테두리선으로 구분된 경기 장에서 상대 로봇을 밀어내야 하기 때문에 상대 로봇 을 향해 돌진하거나 선 밖으로 밀려나가지 않도록 기 구를 구성하는 등 하드웨어의 구성에 중점을 둔 과제 이다.
이러한 과제 모두 경기에 대한 규칙을 상세하게 정 하고, 점수와 평가 방법 등을 사전에 공지하여 학생들 이 과제 수행 및 평가에 따른 객관성을 유지할 수 있도 록 한다.
최근에는 Lego의 플라스틱 재질의 취약점을 보완하 여 알루미늄 재질의 부품과 고출력 DC 모터 및 서보
모터를 사용할 수 있게 됨으로써 더욱 다양한 프로젝 트를 수행할 수 있게 되었다. 미국의 경우 FIRST재단 의 주관 하에 청소년을 대상으로 공학에 대한 사회적 인 관심을 유도하고 창의적인 프로젝트를 수행할 수 있는 FTC, FRC 등의 다양한 로봇 대회가 매년 열리고 있는데, 향후 직접 부품을 가공, 제작하고 NXT 제어기 로 제어하는 방식 등으로 활용할 수 있을 것이다.
설계, 가공 및 제작 중심의 프로젝트
하드웨어와 소프트웨어가 구비된 교육용 기자재는 센서, 제어기, 구동기의 동작 원리와 프로그래밍을 전 반적으로 배우고 사용하기에 적합한 시스템으로 구성 되어 있으나, 기계공학 지식을 바탕으로 부품을 직접 제작하는 것도 필요하다. 따라서 본교 2학년 과정에서
그림 5포켓볼 로봇 그림 7주행 로봇
그림 86족 로봇 그림 6씨름 로봇
는 기계 설계, 가공 및 제작을 중심으로 한 프로젝트를 다음과 같이 구성하였다.
본 프로젝트의 기본 부품은 그림 9와 같으며 프로그 래밍에 대한 부담을 덜고 하드웨어의 제작에 집중할 수 있도록 하기 위하여 DC모터와 무선조종기를 사용
한다. 사용되는 DC모터 드라이버는 무선조종기 이외 에 조이스틱, RS-232C, I2C 통신 등을 지원하므로 유 선조종 방식이나 마이크로프로세서 등의 활용이 가능 하다.
몸체의 제작에 있어서는 가공의 용이함, 제작 시간 및 비용 등을 고려하여 아크릴을 사용하며, 그림 10, 11과 같이 2차원 CAD 프로그램을 이용하여 설계한 도형의 외곽선을 출력하면 다양한 두께의 아크릴 판 을 설계 치수와 동일한 크기로 가공할 수 있는 레이저 가공기를 사용한다.
주행을 위한 휠과 허브는 그림 12, 13과 같이 제작 하는데, 지름 50mm의 알루미늄 환봉을 선반으로 가
그림 9시스템 기본 부품 연결도
그림 10레이저 가공기
그림 11아크릴 절단 가공
그림 12휠과 허브 가공
그림 13허브의 탭 가공
공하고, 드릴 작업과 탭 가공을 통하여 축 구멍, 모터 축 연결부 등을 가공한다.
기본 시스템 이외에 몸체 및 기구부 형상의 가공에 필요한 경우 밀링 머신, CNC 선반, 조각기 및 수동 공 구 등을 활용한다.
이와 같은 기본 시스템 구성을 이용하여 다양한 주 제의 프로젝트 과제 수행이 가능한데, 다음은 축구 및 계단 오르기 과제의 예이다.
축구 과제는 그림 14, 15와 같이 시스템의 기본 부 품을 이용하여 직접 설계 제작한 주행 로봇으로 3m×
3m의 경기장 안에서 지름 약 200mm의 공을 가지고 경기하며, 전, 후반 각 2분 동안의 골 득실로 팀별 순
위를 결정한다. 로봇의 크기는 가로×세로×높이가 250×250×250mm 이하이고, 공을 효율적으로 잡거 나 제어할 수 있는 창의적인 몸체 또는 기구부를 개발 한다.
계단 오르기 과제는 그림 16, 17과 같은 계단을 오 르는 것을 목표로 하는데, 동작 시작에서 완료까지의 시간을 측정하여 짧은 시간 내 동작을 완료하는 순서 대로 순위 결과를 결정하며, 동작 완료 시 계단의 상단 평면에 모든 부품이 올라와 있어야 한다. 로봇의 크기 는 가로×세로×높이가 250×300×200mm 이하이고, 계단을 안정적으로 오를 수 있는 창의적인 형태의 기 구부를 개발한다.
그림 14축구 로봇 3차원 설계
그림 15축구 로봇 그림 17계단 오르기 로봇
그림 16계단 오르기 과제