ISSN 1226-3133 (Print)․ISSN 2288-226X (Online)
Ⅰ. 서 론
전파고도계(radar altimeter)는 단순히 지면으로부터 레 이더까지의 높이를 측정하기 위해 이용되는 일종의 레이 더이다. 레이더는 전파 스펙트럼의 에너지를 방사하고, 수신기로 되돌아오는 에너지를 감지하는 시스템이다. 즉, 전파고도계는 전파를 송신하고, 지표면에서 반사되어 되
돌아오는 반사파를 수신, 분석하여 지상 고도 및 지형에 대한 여러 가지 정보를 획득하는 장비로써 위성(space- borne) 또는 비행기(airborne)에 탑재되어 여러 분야에 널 리 사용된다[1]~[5]. 거리(고도) 측정을 위한 FMCW 시스템 은 최근 관심이 많은 분야로써 산업 분야에 많이 이용되 고 있다. 이러한 FMCW 방식의 센서는 TLPR(Tank Level Probing Radar), 근거리 레이더, 레이저 거리측정기, 유체-
FMCW 전파고도계의 신호처리 알고리즘 구현
Implementation of Signal Processing Algorithms for an FMCW Radar Altimeter
최재현 ․장종훈․이재환․노진입
Jae-Hyun Choi ․Jong-Hun Jang․Jae-Hwan Lee․Jin-Eep Roh
요 약본 논문에서는 주파수 변조 연속파(FMCW) 전파고도계의 신호처리 알고리즘 및 실용적인 평가방안을 제안한다. 전파 고도계는 초기에 탐색모드로 동작하여 고도를 탐색하고, 유효한 고도가 탐색되면 추적모드로 전환되어 측정된 고도를 표시한다. 고도 탐색/추적 시 기준고도 또는 추적고도에 따라 변조대역폭을 제어함으로써 비트 주파수 대역폭을 제한하 며, 송신출력과 수신이득의 제어를 통해 고도 변화에 따라 늘어난 수신 전력의 동적 범위를 보상하도록 설계하였다. 개 발된 전파고도계의 성능은 더욱 실제적인 환경에서의 크레인 시험을 통해 신호처리 알고리즘의 동작과 낮은 측정오차를 성공적으로 검증하였다.
Abstract
This paper presents signal processing algorithms of a frequency-modulated continuous-wave(FMCW) radar altimeter and provides a practical assessment technique. The radar altimeter is initially operated in search mode, when the radar altimeter detects a valid altitude, search mode is switched to track mode and a altitude being tracked is displayed. The sweep bandwidth in each mode is a function of altitude to narrow the beat frequency bandwidth. In addition, transmit power and receiver gain in each mode are controlled to compensate for the dynamic range of wide altitude range. To assess more realistic operation, the radar altimeter was tested using the crane setup. The crane test demonstrated that signal processing algorithms described in this paper resulted in a reduced measurement error rate.
Key words: FMCW, Radar, Altimeter, Signal Processing Algorithms, Crane Test
국방과학연구소(Agency for Defense Development)
․Manuscript received February 25, 2015 ; Revised May 20, 2015 ; Accepted May 28, 2015. (ID No. 20150225-016)
․Corresponding Author: Jae-Hyun Choi (e-mail: [email protected])
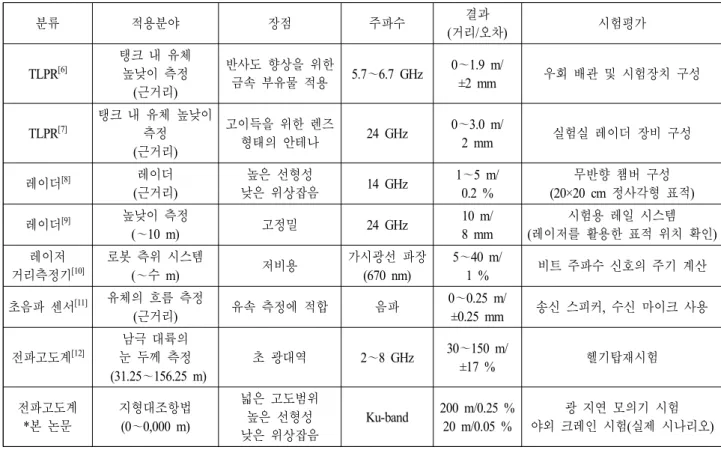
표 1. FMCW 방식의 센서 비교
Table 1. Comparison of sensors using FMCW technique.
분류 적용분야 장점 주파수 결과
(거리/오차) 시험평가
TLPR
[6]탱크 내 유체 높낮이 측정
( 근거리)
반사도 향상을 위한
금속 부유물 적용 5.7~6.7 GHz 0~1.9 m/
±2 mm 우회 배관 및 시험장치 구성
TLPR
[7]탱크 내 유체 높낮이 측정 (근거리)
고이득을 위한 렌즈
형태의 안테나 24 GHz 0 ~3.0 m/
2 mm 실험실 레이더 장비 구성
레이더
[8]레이더
(근거리) 높은 선형성
낮은 위상잡음 14 GHz 1~5 m/
0.2 %
무반향 챔버 구성 (20×20 cm 정사각형 표적)
레이더
[9]높낮이 측정
( ~10 m) 고정밀 24 GHz 10 m/
8 mm
시험용 레일 시스템 ( 레이저를 활용한 표적 위치 확인) 레이저
거리측정기
[10]로봇 측위 시스템
(~수 m) 저비용 가시광선 파장
(670 nm)
5~40 m/
1 % 비트 주파수 신호의 주기 계산
초음파 센서
[11]유체의 흐름 측정
(근거리) 유속 측정에 적합 음파 0 ~0.25 m/
±0.25 mm 송신 스피커, 수신 마이크 사용 전파고도계
[12]남극 대륙의
눈 두께 측정 (31.25 ~156.25 m)
초 광대역 2~8 GHz 30~150 m/
±17 % 헬기탑재시험
전파고도계
*본 논문 지형대조항법
(0~0,000 m)
넓은 고도범위 높은 선형성 낮은 위상잡음
Ku-band 200 m/0.25 % 20 m/0.05 %
광 지연 모의기 시험 야외 크레인 시험(실제 시나리오)
흐름 측정 센서 및 전파고도계로 분류할 수 있다. FMCW 시스템의 종류(type)는 동작 환경, 즉 측정 범위 및 목표 물 형태 등에 관련된다. 상기한 FMCW 방식의 센서들의 특징을 표 1에 정리하였다. 예를 들어, TLPR 시스템은 짧 은 측정 범위 내에서 높은 정밀도를 가지고, 탱크 안의 액 체 높이를 측정하기 위한 공업용 공정 장치로 널리 사용
된다[6],[7]. FMCW 레이더는 고정밀하게 설계되어 산업용
레벨 측정에 효과적으로 활용될 수 있다[8],[9].. 송신 전력 으로 레이저 다이오드를 사용하는 레이저 거리측정기는 측량 및 로봇 응용에 널리 사용된다[10]. 초음파 방사 시스 템은 근거리에서의 유체-흐름 측정에 적합하다[11]. 넓은 대역폭을 사용하여 눈 두께를 측정하는 비행기용 전파고 도계는 상대적으로 짧은 측정 범위를 갖는다[12]. 즉, 상기 한 센서들은 동일한 FMCW 방식을 사용하나, 측정 범위 가 짧다. 그러나 본 논문의 지형대조항법을 위한 전파고 도계는 넓은 고도 범위에 걸쳐 정밀한 정확도가 필요하
다[1]. 본 논문에서는 전파고도계의 넓은 고도 범위에 대 한 낮은 오차를 갖는 고도 탐색 및 추적 신호처리 알고리 즘을 제시한다. 또한, 더욱 실제적인 환경에서 전파고도 계의 성능을 평가하기 위한 크레인 시험방법을 제시하고, 이를 통해 신호처리 알고리즘의 검증 및 낮은 고도 측정 오차를 입증한다.
Ⅱ. 전파고도계 동작이론
FMCW 방식에서 삼각파 변조를 사용하는 경우, 송신 파와 수신파의 차 주파수인 비트 주파수
(Hz)는 식 (1) 과 같다[1],[13]. DSP(Digital Signal Processing)를 통해 비트 주파수를 구하게 되면, 식 (1)의
,
은 설정 값이고,
는 상수이므로 고도()를 산출할 수 있다. 식 (1)에서 비트 주파수는
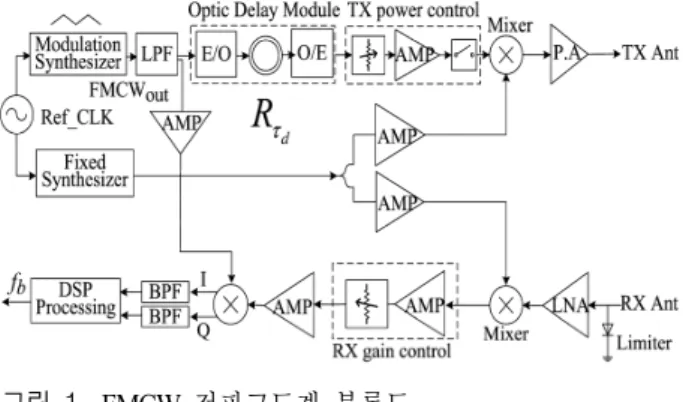
와 에 비례하므로, 고고도에서 비트 주파수가 높아지게 된다.그림 1. FMCW 전파고도계 블록도
Fig. 1. Block diagram of FMCW radar altimeter.
(1) 여기서,
(Hz)는 변조 대역폭,
(Hz)는 변조 주파수,
(m/s)는 광속, (m)는 고도이다.FMCW 전파고도계의 블록도를 그림 1에 나타내었다[1]. 그림 1과 같이 본 논문에서는 광 영역의 고도 측정범위를 얻기 위해 광 지연 모듈(optical delay module)을 사용하였 다. DSP를 통해 FFT(Fast Fourier Transform)를 취하여 얻 은 비트 주파수는 광 지연 모듈에 의해 식 (2)와 같이 표 현된다.
(2) 여기서, (m)는 광 지연 모듈의 지연 거리이다.
식 (2)의 변조대역폭(
)은 고도에 대한 함수로써, 비 트 주파수의 대역폭을 제한하기 위해 고도에 따라 제어 한다[1]. 즉, 저고도에서는 고고도 보다 상대적으로 더 큰 변조대역폭을 사용한다. 상기한 변조 대역폭 대신에 삼각 파의 변조 주파수(
)를 가변하는 방법으로 삼각파 변조 파형의 변조 주기(
)를 고도에 따라 변화시키 면 수신 대역폭을 좁게 할 수도 있다. 그러나 각각의 변조 파형(single ramp)에 대해 변조 주기를 가변하면 각각의 변조 파형에 대한 샘플링 주파수가 가변되어야 하는데, FFT 수행 시에 각각의 변조 파형에 대한 가변 기준 클럭 을 만들기 어렵다. 또한, 고고도에서 변조 주기가 긴 변조파형에 기인하여 고도를 추적하기 위해 필요한 시간이 매우 늘어나게 된다. 이렇듯, 변조 주파수를 가변하는 방 법은 본 전파고도계의 탐색 시간 요구조건을 만족시킬 수 없다.
그림 1과 같이 넓은 고도 범위를 얻기 위해 광 지연 모 듈, 송신 전력 제어(TX power control) 및 수신 이득 제어 (RX gain control)를 설계하였다. 광 지연 모듈은 미리 설 정된 고도만큼의 시간 지연 프로세싱을 수행하여 비트 주파수에 옵셋(offset)을 제공하고, 송신 전력 제어 및 수 신 이득 제어부분은 고도 변화에 따라 변화하는 만큼의 수신 전력의 동적 범위(dynamic range)를 보상한다[1].
Ⅲ. 신호처리 알고리즘
3-1 탐색 모드그림 2에 고도 탐색 도식을 나타내었다. 전파고도계는 초기에 탐색 모드로 동작하여 최소 고도(Hmin)부터 최고 고도(Hmax)까지의 고도를 탐색한다. 탐색 고도 범위는 al- titude range #1부터 altitude range #4까지의 네 단계로 나 뉜다. 각각의 고도 범위는 A, B, C 및 D와 같이 기준 탐색 고도를 갖는다. 기준 탐색 고도에 따라 변조 대역폭 (
), 송신 전력 및 수신 이득이 제어된다. 송신 전력과 수신 이득은 그림 1의 송신 전력 제어 및 수신 이득 제어 에서 가변 감쇠기를 조절하여 제어할 수 있고, 변조 대역 폭은 변조 합성기(modulation synthesizer) 내부의 DDS (Di- rect Digital Synthesizer)에서 제어할 수 있다[1].그림 2와 같이, 각각의 altitude range는 3개의 unit을 가 지며, 각 유닛에서 고도 탐지에 약 4 ms가 소요된다. 만일 세 개의 unit에서 연속으로 고도가 탐지되면, 탐색 모드는 추적 모드로 전환된다. 일례로, 지형의 고도가 altitude range #1에 있다면 모드 전환에 소요되는 시간은 약 12 ms(3 units)이다. 만일 지형 고도가 altitude range #4에 있 다면 추적모드로 전환되는 데에는 약 24 ms(6 units)이 소 요된다.
그림 3은 탐색 모드의 변조 대역폭을 나타내며, 고도에 반비례하게 제어된 변조 대역폭은 비트 주파수의 대역폭 을 좁게 제한한다. 그림 1의 송신 전력 제어 부분의 스위 치가 꺼지는 "TX off" 구간 동안에 노이즈 레벨이 검출되
그림 2. 고도 탐색 도식 Fig. 2. Altitude search scheme.
그림 3. 탐색 모드의 변조 대역폭 Fig. 3. Sweep bandwidth of search mode.
어 고도 탐지 기준이 되는 임계치가 설정된다.
표 2에 탐색 모드에서의 변조 대역폭, 송신 전력 및 수 신 이득을 나타내었다. 이렇듯, 송신 전력 및 수신 이득 제어는 고도 변화에 따라 늘어나는 수신 전력의 동적 범 위를 보상한다.
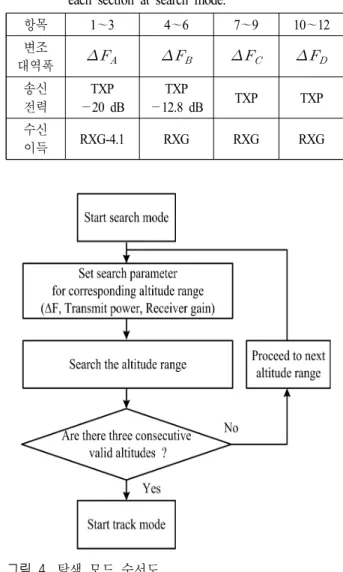
그림 4는 탐색 모드의 순서도를 나타낸 것이다. 최초에 송신 전력, 수신 이득 및 변조 대역폭의 탐색 파라미터들 은 altitude range #1에 따라 설정되고, 세 번 연속적으로 유효한 고도가 탐지되면 추적 모드가 시작된다. 그렇지 않으면 다음 고도 범위인 altitude range #2가 재 탐색된다.
3-2 추적 모드
그림 5는 추적 모드의 순서도를 나타낸 것이다. 추적
표 2. 탐색 모드의 변조 대역폭, 송신 전력 및 수신이득 Table 2. Sweep bandwidth, TX power and RX gain of
each section at search mode.
항목 1~3 4~6 7~9 10~12
변조
대역폭
송신 전력
TXP
—20 dB
TXP
—12.8 dB TXP TXP 수신
이득 RXG-4.1 RXG RXG RXG
그림 4. 탐색 모드 순서도
Fig. 4. Flow diagram of search mode.
모드가 시작되면 변조 대역폭, 송신 전력 및 수신 이득이 추적 고도에 따라 재설정된다. 만일 유효한 고도가 탐지 되면 그 고도가 표시된다. 그렇지 않으면 탐색 모드가 재 시작된다. 고도가 변화하면 추적 루프가 동작하고, 고도 에 따라 추적 파라미터(track parameter)가 재설정된다.
그림 6에는 그림 1의 대역통과필터(BPF: Band Pass Fil- ter)의 대역폭을 나타내었다. BPF의 중심주파수는 1 MHz 이고, 고도가 변화하여 비트 신호의 중심주파수가 변화하 면, 변조 대역폭이 업데이트 되어 비트 주파수를 1 MHz
그림 5. 추적 모드 순서도
Fig. 5. Flow diagram of track mode.
로 만든다. 이렇듯, BPF의 대역폭이 제한되어 수신 감도 가 향상될 수 있다. IF tracking band는 0.5~2.0 MHz이므 로, 추적 고도 범위는 그림 1의 광 지연 모듈의 광 지연 (optical delay) 값을 포함하여 추적 고도의 0.5배에서 2배 까지이다. 고도 산출 알고리즘은 식 (2)로부터 실제 고도 를 구하는데 있어서 광 지연 모듈의 광 지연 값, 안테나 케이블 길이 및 송신 안테나와 수신 안테나 간 간격을 제 외하여 보상시킨다.
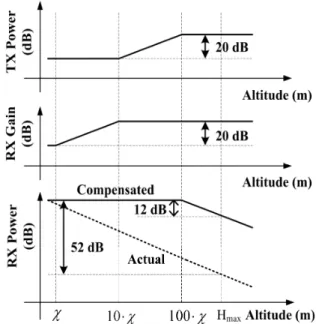
그림 7에 추적 모드에서 제어되는 추적 파라미터 중에 서 고도에 따라 제어되는 송신 전력, 수신 이득을 나타내
그림 6. 대역통과필터 대역폭 Fig. 6. Bandwidth of IF filter(BPF).
그림 7. 추적 모드의 송신 전력, 수신 이득 및 수신 전력 Fig. 7. TX power, RX gain and RX power at track mode.
었다. 보상된 수신 전력(RX power)의 동적 범위는 12 dB 로써 보상 전 수신 전력의 동적 범위 대비 40 dB가 줄었 다. 이렇듯, 상대적으로 저고도에서 송신 전력 및 수신 이 득 제어를 통해 넓은 고도 범위와 낮은 감청 확률(LPI:
Low Probability of Intercept)의 결과를 얻는다.
표 3에 추적 모드에서의 변조 대역폭, 송신 전력 및 수 신 이득을 나타내었다. 변조 대역폭은 고도에 반비례하여 선형적으로 제어되고, 송신 전력과 수신 이득은 고고도 대비 저고도에서 약 20 dB 작다. 탐색 모드에서는 그림 6과 같이 기준 탐색 고도(A, B, C 및 D)에 따라 변조 대 역폭, 송신 전력 및 수신 이득이 제어되나, 추적 모드에서
표 3. 추적 모드의 변조 대역폭, 송신 전력 및 수신이득 Table 3. Sweep bandwidth, TX power and RX gain of
each section at track mode.
항목 χ ~10 ·χ 10 ·χ ~100 ·χ 100 ·χ~
m ax변조
대역폭 ∝
(추적 고도에 반비례) 송신
전력
TXP
—20 dB
TXP
—20log(10 · χ/R) TXP 수신
이득
RXG
—20log(10 ·χ/R) RXG RXG
는 기준 고도가 아닌 추적하고 있는 고도에 따라 변조 대 역폭, 송신 전력 및 수신 이득이 제어된다.
Ⅳ. 크레인 시험
FMCW 전파고도계의 고도 측정 오차를 광 지연 모의 기를 사용하여 실험적으로 입증하였다. 광 지연 모의기는 고도 지연과 도플러 신호(
)를 전파고도계에 제공하며, 고도 지연 및 도플러 주파수를 가변할 수 있다[1].한편, 전파고도계의 동작을 실제적인 환경에서 입증하 기 위한 시험 방법은 다양한 요소들을 고려하여 결정해 야 한다. 일반적으로 전파고도계의 성능을 관찰하기 위해 비행 시험을 수행한다. 비행 시험에서, 항공기는 몇 시간 동안의 비행 데이터를 제공하며, 전파고도계의 고도 데이 터와 정밀한 디지털 고도 모델(DEM: Digital Elevation Model)이 전파고도계의 성능을 평가하기 위해 사용된다.
그러나 비행 시험은 전파고도계의 빔폭, 항공기의 높이 및 지형의 굴곡도(roughness)에 의해 고도 오차가 발생할 수 있다[14]. 전파고도계 시스템의 총 정밀도는 센서 정밀 도(sensor accuracy)와 지형 반사 신호 정밀도(ground return signal accuracy)의 함수이다. 지형 반사 신호 정밀도는 비 행체 고도 및 비, 안개, 먼지, 지형 특성과 이와 관련된 반 사 계수 특성을 포함한다[15]. 따라서 지형 반사 신호 오차 와 무관한 고도계의 센서 정밀도를 시험하기 위한 방법 이 필요하다. 본 논문에서는 센서 정밀도를 측정하기 위 한 시험 방법으로 대형 크레인 시험 방법을 제시한다. 크 레인 시험에서는 전파고도계와 LRF(Laser Range Finder) 를 탑재하고, 50 m 이하의 저고도에서 잔잔한 강물을 상 대로 수행하여 LRF로 부터의 절대 고도와 전파고도계의 측정 고도를 비교 평가한다. 고고도(50 m 이상)에 대한 시험은 50 m 이하에서의 크레인 탑재시험 결과와 광지연 모의기에 의한 측정오차를 비교 평가하여 광지연 모의기 의 유효성을 입증하고 나서, 50 m 이상의 고도에 대해 광 지연모의기를 통한 모의 신호를 생성시켜 고도 측정 및 측정고도 오차에 대한 평가를 수행한다.
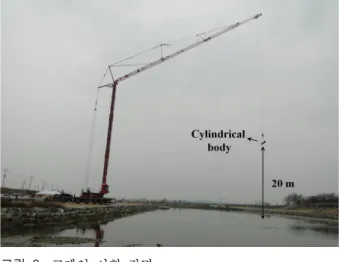
그림 8은 수면 20 m 상공에서 cylindrical body에 전파 고도계와 LRF를 탑재하여 시험하는 장면이다. 이때, cy- lindrical body의 높이는 제어가 가능하다. 그림 9는 cylindri-
그림 8. 크레인 시험 장면 Fig. 8. Photo of crane test.
(a) (b)
(c) (d)
그림 9. 원통형 몸체 사진 (a) 원통형 몸체, (b) 전면부, (c) 후면부, (d) 중심부 사진
Fig. 9. Photo of cylindrical body: (a) Cylindrical body, (b) Front, (C) Rear, (D) Center view of cylindrical bo- dy inside.
cal body의 내부 모습이다. 송신 안테나(TX antenna) 위에 장착된 상용 IMU(Inertial Measurement Unit)는 수직 방향 으로 부터의 롤 각도를 측정하고, 신호 수집 PC는 측정된 데이터와 시험 환경을 저장한다. PC 스크린은 무선 LAN (Local Area Network)를 이용하여 지상에서 모니터링할
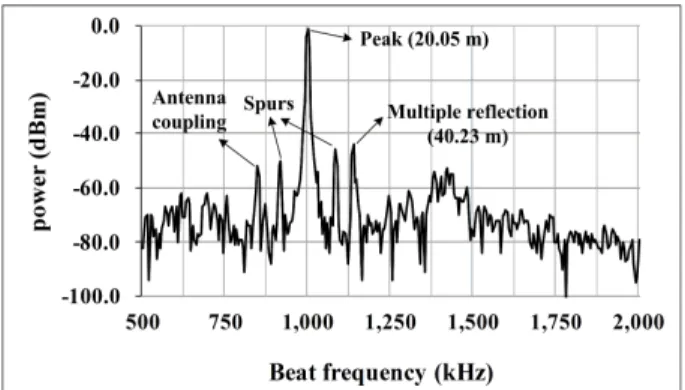
그림 10. 20 m에서 측정된 비트 신호의 스펙트럼 Fig. 10. Measured spectrum of beat signal at 20 m.
수 있고, 전파고도계, LRF 및 PC는 동일한 외부 배터리를 사용한다. Cylindrical body의 직경은 400 mm이고, 송신 안테나와 수신안테나간 거리는 1.5 m이다.
그림 11은 IF tracking band 내의 측정된 비트 신호의 스 펙트럼으로 전파고도계는 1 MHz의 중심주파수를 추적한 다. 고도 산출 알고리즘으로부터 계산된 고도는 20.05 m 로 사용된 안테나 케이블 및 안테나 간 간격이 보정되었 다. 20 m 구간은 표 3의 χ~10 ·χ 사이 구간에 해당하 며, 이때 송신 전력 및 수신 이득은 표 3과 같다. 표 3의 수신 이득은 그림 1의 BPF 출력단의 이득 값으로, 그림 10의 Peak Power가 0 dBm이므로 수신 이득을 고려하면 실제 안테나 입력의 수신 레벨은 —45 dBm이다.
송신 안테나와 수신 안테나 간의 안테나 커플링 신호 크기는 수면으로부터의 최대 크기(peak)에 비해 —50 dB 작다. 그림 10에서와 같이 cylindrical body와 수면 사이의 다중 반사(multiple reflection)가 발생하였으나, 다중 반사 신호의 크기는 수면으로부터의 최대 크기에 비해 무시할 수 있으므로 고도 결정에 영향을 주지 않는다.
그림 10의 최대 크기의 양쪽에 대칭으로 존재하는 불 요 신호(spurs)는 실제 지형에 대한 신호가 아닌 외부 배 터리로 부터의 부가적인 잡음 신호로 판단된다. 크레인 시험에서는 전파고도계와 LRF에 전원을 인가하기 위해 실제 운용 환경에서 사용하지 않는 외부 배터리와 레귤 레이터를 사용하였다. 상기 불요파를 관찰하기 위해 외부 레귤레이터를 바꾸어 추가 실험을 수행하였고, 그 결과 불요파가 없어짐을 확인하였다.
그림 11. 뷰어 프로그램 Fig. 11. Viewer program.
그림 11은 개발된 뷰어 프로그램을 나타낸다. 그림 11 과 같이 전파고도계로 측정된 고도는 20.05 m이고, 기준 고도인 LRF 고도는 20.04 m이다. LRF 경사고도는 LRF의 수직고도와 IMU로 측정된 각도를 통해 계산된다. 전파고 도계의 상태는 추적, 유효상태이다. 그러므로 설계된 전 파고도계의 센서 정밀도는 매우 우수함을 알 수 있다.
Ⅴ. 결 론
광범위 고도에 대해 신뢰성 있는 고도 탐색 및 추적을 위한 탐색 모드 및 추적 모드를 개발하였다.
탐색 및 추적 모드에서 가변 대역폭 변조방식을 사용 하고, 고도에 따라 송신 전력 및 수신 이득을 제어한다.
탐색 모드에서 송신 전력 및 수신 이득 제어는 고도 증가 에 따라 늘어나는 수신 전력의 동적 범위를 보상한다. 추 적 모드에서는 상대적으로 저고도에서 송신 전력 및 수 신 이득 제어를 통해 넓은 고도 범위와 낮은 감청 확률 (LPI: Low Probability of Intercept)의 결과를 가져온다.
개발된 전파고도계의 성능은 더욱 실제적인 환경에서 평가하기 위해 크레인 시험으로 전파고도계의 고도 측정 오차를 시험하였다. 크레인 시험을 통해 낮은 측정오차가 성공적으로 입증되었다.
References
[1] 최재현, 장종훈, 노진입, "광 지연선 기반의 넓은 고도 범위를 갖는 고정밀 FMCW 전파고도계 송수신기 설 계", 한국전자파학회논문지, 25(11), pp. 1190-1196, 2014 년 11월.
[2] D. Cailliu, V. Zlotnicki, "Precipitation detection by the TOPEX/Poseidon dual frequency radar altimeter, TOPEX microwave radiometer, special sensor microwave/imager and climatological shipboard reports", IEEE Trans. Geo-
sci. Remote Sens., vol. 38, no. 1, pp. 205-213, Jan. 2000.
[3] G. D. Quartly, "Optimizing
information from the Ja- son-2 altimeter", IEEE Geosci. Remote Sens. Lett., vol. 6, no. 3, pp. 398-402, Jul. 2009.[4] P. A. M. Berry, R. G. Smith, M. K. Salloway, and J.
Benveniste, "Global analysis of EnviSat burst echoes over inland water", IEEE Trans. Geosci. Remote Sens., vol.
50, no. 5, pp. 1980-1984, May 2012.
[5] G. Alberti, L. Festa, C. Papa, and G. Vingione, "A wave- form model for near-nadir radar altimetry applied to the Cassini mission to Titan", IEEE Trans. Geosci. Remote
Sens., vol. 47, no. 7, pp. 2252-2261, Jul. 2009.
[6] M. Vogt, "An optimized float for reliable radar tank level measurement in bypass pipes", in Microw. Conf.(Ge-
MiC), Mar. 2014.
[7] N. Pohl, "A dielectric lens-based antenna concept for high-precision industrial radar measurements at 24 GHz", in Proc. European Microw. Conf.(EuMC), pp. 731-734, Oct. 2012.
[8] M. T. Dao, D. H. Shin, Y. T. Im, and S. O. Park, "A two sweeping VCO source for heterodyne FMCW radar",
IEEE Trans. Instrum. Meas., vol. 62, no. 1, pp. 230-239,
Jan. 2013.
[9] T. Musch, "A high precision 24-GHz FMCW radar based on a fractional-N ramp-PLL", IEEE Trans. Instrum.
Meas., vol. 52, no. 2, pp. 324-327, Apr. 2003.
[10] B. Journet, G. Bazin, "A low-cost laser range finder based on an FMCW-like method", IEEE Trans. In-
strum. Meas., vol. 49, no. 4, pp. 840-843, Aug. 2000.
[11] O. P. Sahu, A. K. Gupta, "Measurement of distance and medium velocity using frequency-modulated sound/ul- trasound", IEEE Trans. Instrum. Meas., vol. 57, no. 4, pp. 838-842, Apr. 2008.
[12] N. Galin, A. Worby, T. Markus, C. Lueschen, and P.
Gogineni, "Validation of airborne FMCW radar mea- surements of snow thickness over sea ice in Antarctica",
IEEE Trans. Geosci. Remote Sens., vol. 50, no. 1, pp.
3-12, Jan. 2012.
[13] H. D. Griffiths, "New ideas in FM radar", Electron.
Commun. Eng. J., vol. 2, no. 5, pp. 185-194, Oct. 1990
[14] J. L. Campbell, M. U. de. Haag, "Assessment of radaraltimeter performance when used for integrity monito- ring in a synthetic vision system", in Proc. 20th Digital
Avionics Systems, vol. 1, Oct. 2001.
[15] S. H. Thomas, "High accuracy radar altimeter using au- tomatic calibration", U. S patent 8,004,842 B2, Oct. 25, 2011.
최 재 현
1995년 2월: 충남대학교 전자공학과 (공학 사)
1997년 2월: 충남대학교 전자공학과 (공학 석사)
2014 년 2월: 충남대학교 전자전파정보통 신공학과 (공학박사)
1998 년 3월~현재: 국방과학연구소 [주 관심분야] Proximity Fuze, Altimeter, Short-Distance Radar 등
장 종 훈
2004년 8월: 포항공과대학교 전자전기공 학과 (공학사)
2007년 2월: 포항공과대학교 정보통신대 학원 (공학석사)
2007 년 1월~2011년 10월: LG전자 MC연 구소
2011 년 11월~현재: 국방과학연구소
[주 관심분야] 안테나 설계, FMCW 레이더 설계 등
이 재 환
2011 년 2월: 금오공과대학교 전자공학과 ( 공학사)
2013 년 2월: 금오공과대학교 전자공학과 ( 공학석사)
2013년 9월~현재: 국방과학연구소 [주 관심분야] FMCW 레이더 설계, 신호
처리 알고리즘 등
노 진 입