한국정보통신학회논문지 Vol. 25, No. 8: 1103~1109, Aug. 2021
함정 통합기관제어체계의 제어로직 검증을 위한 연동신호 시뮬레 이터 개발
이헌석1·손나영1·심재순2·오진석3*
Development of Interlocking Signal Simulator for Verification of Naval Warship Engineering Control Logics
Hunseok Lee
1· Nayoung Son
1· Jaesoon Shim
2· Jin-Seok Oh
3*1
Senior Engineer, Naval System Team3, Naval R&D Center, Hanwha Systems, Gumi, 39376 Korea
2
Chief Engineer, Naval System Team3, Naval R&D Center, Hanwha Systems, Gumi, 39376 Korea
3*
Professor, Department of Marine Engineering, Korea Maritime and Ocean University, Busan, 49112 Korea
요 약
통합기관제어체계(ECS)는 함정의 추진체계 전반을 제어하고 감시함으로써 함정이 안정적으로 임무를 수행할 수 있 도록 하는 제어장비이다. 최근 함정의 요구성능 및 임무가 다양해짐에 따라 함정 추진체계는 과거에 비해 구성 및 제어가 복잡해지고 있다. 복잡해지고 있는 추진체계 구성에 맞춰 운용자 입장에서 편리하고 안정적인 추진체계 제어를 위해 함 정의 ECS의 자동제어 기능의 요구가 증가하고 있다. 이에 따라 ECS의 안정서 및 신뢰성에 대한 검증이 요구되고 있다.
본 논문에서는 CODLOG 추진체계를 갖는 함정을 대상으로 ECS 제어로직 및 통신 프로토콜 검증을 위한 연동신호 시뮬 레이터를 개발한다. 개발한 연동신호 시뮬레이터는 가스터빈, 추진전동기, 디젤발전기 외 11종의 보조기기 계통의 신호 를 시뮬레이션 가능하도록 구현하였다. 개발한 연동신호 시뮬레이터는 ECS의 함 탑재이전 공작수락시험(FAT) 단계에 서 ECS 콘솔과 연동하여 ECS의 통신 프로그램 및 I/O 신호의 정적 시험을 통해 ECS의 신뢰성을 검증하였다.
ABSTRACT
ECS is a control device so that the warship can perform the mission stably by controlling and monitoring the entire propulsion system. As the recent provisions of the warship, it's propelling system is complicated than past, as the demand performance and mission of the warships are diverse. In accordance with the complicated propulsion system configuration, the demand for automatic control function of the ECS is increasing for convenient and stable propulsion system control for convenient and stable. As a result, verification of ECS stability and reliability is required. In this paper, we develop an interlocking signal simulator for verifying ECS control logic and communication protocol for warship with CODLOG propulsion systems. The simulator developed was implemented to simulate a signal of gas turbine, propulsion motors, diesel generator and 11 kinds of auxiliary equipment. The reliability of ECS was verified through the ECS communication program and the I/O signal static test with the simulator.
키워드
: 통합기관제어체계, 복합식 추진시스템, CODLOG, 추진체계, 연동신호 시뮬레이터
Keywords
: Engineering control system(ECS), Hybrid propulsion system, CODLOG(Combined Diesel-eLectric Or Gas-turbine), Propulsion system, Signal simulator
Received 20 May 2021, Revised 25 June 2021, Accepted 9 July 2021
* Corresponding Author Jin-Seok Oh(E-mail:[email protected], Tel:+82-51-410-4866)
Professor, Department of Marine Engineering, Korea Maritime and Ocean University, Busan, 49112 Korea
Open Access
http://doi.org/10.6109/jkiice.2021.25.8.1103
print ISSN: 2234-4772 online ISSN: 2288-4165Ⅰ. 서 론
최근 건조되고 있는 함정의 추진체계는 가스터빈 및 디젤엔진을 이용한 기계식 추진체계에서 추진전동기와 함께 가스터빈 또는 디젤엔진이 함께 적용되는 복합식 추진체계를 거쳐 추진전동기와 발전기로 이루어지는 전기식 추진체계로 변화되고 있다. 이러한 추진체계의 변화의 이유는 함정 임무 다양화에 따른 대잠능력의 향 상, 국방예산 감축에 따른 함정 운용 유류비 절감, 함정 탑재 무기체계 변화에 따른 함정 내 요구전력의 증가, 자동화시스템 적용에 따른 승선인원 감축 및 유지보수 의 편리성 증대, 반도체 기술의 발달로 인한 전력변환장 치 보급 등이 있다[1-4].
함정 통합기관제어체계(ECS, Engineering Control System)는 함정 추진체계에 대한 전반적인 제어 및 감 시를 수행하는 장비로, 주요 추진장비(가스터빈, 추진전 동기, 디젤엔진, 가변추진기 등)와 보조기기(펌프, 팬 등) 의 시동/정지 및 제어 명령 수행과 장비간의 인터록, 전 환절차 등 제어 로직에 따른 장비 운용 등을 수행한다.
이에 따라 최근 건조되는 함정의 추진체계가 복잡해짐 에 따라 ECS에 대한 요구기능 및 중요성이 증가하고 있 다[5,6].
그러나 국방기술품질원의 ‘국방과학기술조사서’에 따르면 주요 함정 추진기술 중 추진기기, 추진동력원기 술 및 추진동력전달기술은 선진국 또는 보통수준으로 판단하나, 추진제어기술은 국내 개발능력이 아직 부족 한 것으로 판단하고 있다. 이러한 이유로 복합식 추진체 계 함정에 탑재되는 통합기관제어시스템은 해외 기술 에 의존하고 있는 실정이다[7]. 이러한 이유로 국내에선 ECS의 기술축적 및 국산화를 위하여 부족한 추진제어 기술의 확보 및 신뢰성 향상을 위한 연구를 수행 중이다 [8-11].
본 연구에서는 ECS의 함 탑재 이전에 개발 및 제작 과정에서 발생할 수 있는 제어로직의 결함을 확인할 수 있는 연동신호 시뮬레이터를 개발한다. 연동신호 시뮬레 이터는 복합식 추진체계인 CODLOG(Combined Diesel- eLectric Or Gas-turbine)를 적용함 함정을 대상으로 개 발하였다.
Ⅱ. 연동신호 시뮬레이터
2.1. 함정 통합기관제어체계
복합식 추진체계가 적용됨에 따라 제어의 복잡성 증 가와 함께 함정 운용 인력의 감소는 ECS의 높은 수준의 자동제어기능을 요구되고 있다. 실제 함정의 운항 또는 해상 시운전시 잘못된 제어로직으로 인한 장비의 운용 은 함정 추진체계에 큰 손상을 야기할 수 있다. 이는 곧 물적, 인적 자원의 소비하게 되므로 함정의 추진체계를 통합 운용하는 ECS의 제어로직 검증을 통한 무결성 입 증은 필수적이다.
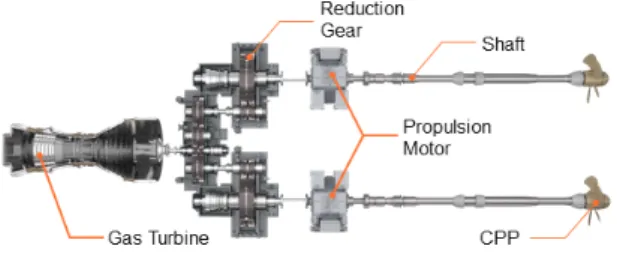
본 논문에서는 추진전동기와 가스터빈을 추진체계로 갖는 CODLOG 함정의 ECS의 검증을 위한 연동신호 시 뮬레이터를 개발한다. 그림 1은 연동신호 시뮬레이터 적용 대상함정인 CODLOG 추진체계의 구성도를 나타 낸다.
Fig. 1 Diagram of CODLOG propulsion system
주요 추진 장비의 안정적인 운용을 위해 많은 보조기 기가 함께 연동되어 운용되어야 한다. 모든 보조기기에 대하여 운용자가 상황에 맞춰 운용할 수 없으므로 ECS 는 특정 상황 또는 장비 운용에 따라 보조기기를 자동 제어하여 함정이 안정적으로 운용될 수 있도록 한다. 따 라서 연동신호 시뮬레이터는 ECS의 제어로직의 검증 을 위해 추진 장비 및 보조기기의 신호를 모사할 수 있 어야 한다.
2.2. 연동신호 시뮬레이터 하드웨어
연동신호 시뮬레이터는 실제 함정에 탑재되는 ECS와
물리적 연동규격이 동일해야 한다. 따라서 연동신호 시
뮬레이터는 ECS의 신호입출력장치(DAU, Data Acquisition
Unit)와 실제 함정의 추진 및 보조 장비와 연결되는 동인
할 인터페이스로 구성된다. 함정에 탑재되는 ECS의
DAU는 함정의 크기 및 연동 신호 개수에 따라 수십 대가
설치될 수 있으므로 각 DAU와 연동이 용이하도록 이동 식 렉(rack) 형식으로 구성하였다. 그림 2는 연동신호 시 뮬레이터의 하드웨어 형상을 나타내며, 표 1은 연동신호 시뮬레이터의 하드웨어 사양을 나타낸다.
Fig. 2 Configuration of interlocking equipment simulator
Table. 1 Specification of interlocking equipment
Equipment Interface
Simulation PC
CPU : 2.0Ghz RAM : 4GB SDD : 128GB
LAN 10GB 16-port
Serial Communication RS-232/422/485 to USB 16-port
Monitor 19 inch
Simulator S/W Windows 10 64bit Visual Studio 2008
연동신호 시뮬레이터는 총 14종의 장비 또는 주요 보 조기기계통을 동시에 시뮬레이션 진행할 수 있도록 하 였으며, 추후 추가되는 장비 또는 미래 함정의 추진체계 와 물리적 연동 규격을 만족하기 위해 여유분의 통신포 트(TCP/IP, RS422, RS485 등)를 갖도록 설계하였다.
2.3. 연동신호 시뮬레이터 소프트웨어
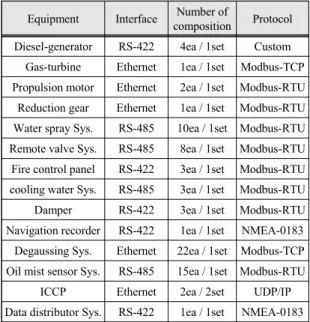
연동신호 시뮬레이터 프로그램 개발환경은 MS사의 Windows 10 64bit 기반의 Visual Studio 2008을 이용하 였으며, 연동신호 시뮬레이터에서 생성하는 장비의 종 류 및 인터페이스는 표 2와 같다.
Table. 2 List of simulator generation equipment signal Equipment Interface Number of
composition Protocol Diesel-generator RS-422 4ea / 1set Custom Gas-turbine Ethernet 1ea / 1set Modbus-TCP Propulsion motor Ethernet 2ea / 1set Modbus-RTU Reduction gear Ethernet 1ea / 1set Modbus-RTU Water spray Sys. RS-485 10ea / 1set Modbus-RTU Remote valve Sys. RS-485 8ea / 1set Modbus-RTU Fire control panel RS-422 3ea / 1set Modbus-RTU cooling water Sys. RS-485 3ea / 1set Modbus-RTU Damper RS-422 3ea / 1set Modbus-RTU Navigation recorder RS-422 1ea / 1set NMEA-0183 Degaussing Sys. Ethernet 22ea / 1set Modbus-TCP Oil mist sensor Sys. RS-485 15ea / 1set Modbus-RTU
ICCP Ethernet 2ea / 2set UDP/IP Data distributor Sys. RS-422 1ea / 1set NMEA-0183
Ⅲ. 연동신호 시뮬레이터 연동
연동신호 시뮬레이터와 ECS의 연동을 위한 하드웨 어 연결도는 그림 3과 같이 신호입출력장치와 연동신호 시뮬레이터를 연동시켜 시험을 수행한다. 콘솔에서 각 장비 또는 보조계통으로 명령신호를 보내게 되면 연동 신호 시뮬레이터는 명령받은 신호에 따라 장비의 동작 상태 및 출력(응답)상태를 ECS에 송신한다.
Fig. 3 ECS and simulator hardware connection diagram
Fig. 4 ECS and simulator TCP/IP Test
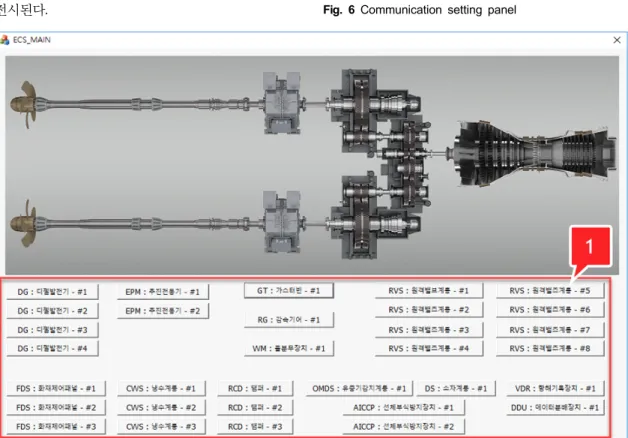
그림 4는 ECS와 연동신호 시뮬레이터 간 TCP/IP 시 험을 위해 결선한 모습을 나타낸다. 그림 5는 연동신호 시뮬레이터 프로그램 메인화면을 나타내며, 그룹 1은 연동신호 시뮬레이터의 신호 생성 장비 목록을 나타내 며, 각 버튼을 클릭하면 해당 장비의 시뮬레이터 창이 전시된다.
연동신호 시뮬레이터에서 연동을 하고자하는 장비를 선택하면 통신 설정(IP, Serial port 등) 후 해당 장비의 프로토콜에 따라 장비가 연동된다. 그림 6은 통신 종류 에 따른 설정창을 나타낸다.
Fig. 6 Communication setting panel
Fig. 5 ECS interlocking signal simulator main panel
연동신호 시뮬레이터와 ECS와 연동 확인을 위해 추 진전동기의 연동을 시험한다. 본 논문에서 대상함정으 로 선정한 CODLOG 추진체계는 그림 1과 같이 각 축에 추진전동기가 한 대씩 설치되어 있으므로 연동신호 시 뮬레이터 또한 ECS와 추진전동기 신호 연동을 위해 2 개의 통신 채널로 구성된다. 그림 7은 추진전동기의 통 신포트 설정 화면을 나타낸다.
Fig. 7 Communication setting panel of propulsion motor
연동신호 시뮬레이터의 추진전동기와 ECS가 연동되 면, ECS의 미믹화면에 통신 끊어진 표시에서 연동시호 시뮬레이터에서 송신하는 신호로 정상 표기된다. 그림 8에서 추진전동기의 데이터는 하얀 네모 안에 정상적으 로 연동되어 데이터가 송-수신됨을 확인할 수 있으며, 우측 냉각계통의 데이터는 통신 연결이 끊어져 있어 정 상표기가 되자 않음을 확인할 수 있다.
Fig. 8 ECS MIMIC of propulsion motor page
ECS와 추진전동기는 Ethernet 기반의 Modbus RTU 프로토콜로 연동되며 ECS가 Master, 추진전동기가 Slave로 동작된다. 그림 9와 그림 10에서 연동신호 시뮬 레이터에서 ECS와 연동되는 데이터의 송-수신 시각, 통 신 데이터 패킷과 테그 이름, 데이터 타입 및 값 등이 전 시됨을 확인할 수 있다.
Fig. 9 Propulsion Motor data In-Out packet
Fig. 10 Propulsion Motor data In-Out time
ECS는 운용자의 편의성과 함정의 안전운항을 위해 주요 장비 사용에 따른 각종 보조기기를 시퀀스 적으로 자동제어하게 된다. 잘못된 제어 명령은 장비의 손상을 야기할 수 있으므로 함 시운전 이전에 충분한 검증을 필 요로 한다. ECS의 제어로직 검증을 위해 ECS와 연동신 호 시뮬레이터가 연동되어 안정적으로 보조기기의 장 비가 제어되는지 검사자가 동작 모델을 바탕으로 기능 을 확인할 수 있도록 한다. 표 3은 추진전동기의 시동 절 차에 따른 명령과 응답 로직의 예를 나타낸다.
표 3에 나타나듯 ECS에서 추진전동기(HED, Hybrid
Elecric Drive)의 시동 명령을 송신하게 되면, 송신값에
따라 연동신호 모사장치는 AFE(Active Front End) 및
INV(Inverter)에 전압이 걸리게 되며 정상적으로 시동
시퀀스가 동작하게 된다.
Ⅳ. 결 론
본 연구에서는 CODLOG 추진체계의 통합 제어 및 감시를 위한 ECS의 기능 검증을 위한 연동신호 시뮬레 이터를 개발하였다. 연동신호 시뮬레이터는 가스터빈, 추진전동기, 디젤발전기 외 12종의 장비 또는 계통에 대 하여 실제 함 탑재장비와 동일한 물리 규격과 프로토콜 을 갖는 신호를 생성한다.
ECS와 연동신호 시뮬레이터와 연동결과 ECS의 명 령에 따른 정상동작을 확인할 수 있었으며, ECS 내부 로 직 및 미믹과의 테그 연동상태를 확인할 수 있었다. 이
에 따라 본 연구에서 개발한 연동신호 시뮬레이터를 활 용하여 생산 및 개발되는 ECS의 함 탑재 이전에 안정성 및 신뢰성을 확보하는 FAT(Factory Acceptance Test) 등에 활용 가능할 것으로 판단된다.
ACKNOWLEDGEMENT
This research was supported by Defense Industry Technology Center of Korea(Development of Common SW for Naval Ship Engineering Control System).
input Propulsion motor running model output
tagname address DAU No. I/O tagname address DAU No.
PM_01_0111 4 4 EPM01 – HED CMD RUNNING
EPM01 – AFR line bus 1 phase A voltage PM_01_0006 30001 4 EPM01 – AFR line bus 1 phase B voltage PM_01_0007 30002 4 EPM01 – AFR line bus 1 phase C voltage PM_01_0008 30003 4 EPM01 – AFR line bus 1 frequency PM_01_0013 30008 4 EPM01 – INV load bus 2 phase A voltage PM_01_0014 30009 4 EPM01 – INV load bus 2 phase B voltage PM_01_0015 30010 4 EPM01 – INV load bus 2 phase C voltage PM_01_0016 30011 4 EPM01 – INV load bus 2 phase D voltage PM_01_0017 30012 4 EPM01 – INV load bus 2 phase E voltage PM_01_0018 30013 4 EPM01 – INV load bus 2 phase F voltage PM_01_0019 30014 4
LOGIC if EPM01 – HED CME RUNNING ==1
then EPM01 – AFE line bus 1 phase A voltage = 440..
EPM01 – AFE line bus 1 phase B voltage = 440..
EPM01 – AFE line bus 1 phase C voltage = 440..
EPM01 – AFE line bus 1 phase frequency = 60..
EPM01 – INV load bus 2 phase A voltage = 440..
EPM01 – INV load bus 2 phase B voltage = 440..
EPM01 – INV load bus 2 phase C voltage = 440..
EPM01 – INV load bus 2 phase D voltage = 440..
EPM01 – INV load bus 2 phase E voltage = 440..
EPM01 – INV load bus 2 phase F voltage = 440 else EPM01 – AFE line bus 1 phase A voltage == 0 EPM01 – AFE line bus 1 phase A voltage = 0.. EPM01 – AFE line bus 1 phase B voltage = 0.. EPM01 – AFE line bus 1 phase C voltage = 0.. EPM01 – AFE line bus 1 phase frequency = 0.. EPM01 – INV load bus 2 phase A voltage = 0.. EPM01 – INV load bus 2 phase B voltage = 0.. EPM01 – INV load bus 2 phase C voltage = 0.. EPM01 – INV load bus 2 phase D voltage
= 0.. EPM01 – INV load bus 2 phase E voltage = 0..
EPM01 – INV load bus 2 phase F voltage = 0 Table. 3 I/O model and logic for propulsion motor running
REFERENCES
[ 1 ] H. M. Beak, K. S. Jung, M. H. Lee, and J. S. Choi, “A Study on the Arrangement of Integrated Power System for Warship,” Journal of the Korea Society of Marine Engineering, vol. 38, no. 9, pp.1070-1074, Nov. 2014.
[ 2 ] H. M, Lee and B. J. Cho, “Analysis of Development Trend for the Integrated Power System of Naval Vessels to Perform the High-Power and Energy Mission Load Platform,” Journal of the Korean Society of Marine Engineering, vol. 35, no. 6, pp. 796-801, Aug. 2011.
[ 3 ] H. M. Lee, “Combined Propulsion System Analysis for Naval Combatant Vessels using Diesel and Gas Turbine Engine,” Journal of the Korean Society of Marine Engineering, vol. 15, no. 5, pp.16-21, Oct. 2011.
[ 4 ] G. M. Jebsen, “Electric warship technology overview,”
Office of Naval Research Presentation Conference, USA, 2001.
[ 5 ] S. Y. Jung, “The development of warship propulsion system simulator for ECS reliability,” Ph. D. dissertation, Department of Marine Engineering, Korea Maritime and Ocean University, Korea, 2020.
[ 6 ] J. S. Shim, H. S. Lee, S. Y. Jung, and J. S. Oh, “Design of Processor Lever Controller for Electric Propulsion System of Naval Ship,” Journal of the Korea Institute of Information and Communication Engineering, vol. 25, no. 1, pp.
134-145, Jan. 2021.
[ 7 ] J. W. Jung, “2010 Defense science and technology survey,”
Defense Agency for Technology and Quality, 2010. doi:
10.23000/TRKO201700003262.
[ 8 ] S. Y. Jung, H. S. Lee, and J. S. Oh, “Development of an ECS simulator for warship propulsion systems,” Naval Engineers Journal, vol. 132, no. 4, pp. 133-140, Jun. 2020.
[ 9 ] J. H. Jang, S. W. Shin, M. G. Kim, and J. S. Oh,
“Development of CODOG propulsion system simulator,”
Journal of the Korea Institute of Information and Communication Engineering, vol. 21, no. 9, pp. 1808-1817, Sep. 2017.
[10] J. H. Jang, D. J Kim, M. G. Kim, and J. S. Oh, “Development of naval ship propulsion system simulator for CODLOG based ECS verification,” Journal of the Korea Institute of Information and Communication Engineering, vol. 21, no.
9, pp. 1796-1807, Sep. 2017.
[11] N. Y. Son, H. S. Lee, and J. S. Oh, “Development of propulsion equipment model and simulator for verification of propulsion system,” Journal of the Korea Society of Marine Engineering, vol. 43, no. 1, pp. 48-55, Jan. 2019.
이헌석(Hunseok Lee)
2012년 한국해양대학교(공학학사) 2014년 한국해양대학교(공학석사) 2014년 한국해양대학교 수중운동체특화연구
센터 연구원
2020년 한국해양대학교(공학박사)
2020년 ~ 현재 한화시스템 해양연구소 전문연구원
※관심분야 : Monitoring&Control System, Energy System Design, Energy Management System
손나영(Nayoung Son)
2016년 한국해양대학교(공학학사) 2018년 한국해양대학교(공학석사)
2018년 ~ 현재 한화시스템 해양연구소 선임연구원
※관심분야 : Modelling&Simulation, Ship Porpulsion System
심재순(Jaesoon Shim)
1997년 대한민국 해군 대위 2006년 대우조선해양 특수선설계 과장 2020년 한국해양대학교(공학석사)
2014년 ~ 현재 한화시스템 해양연구소 수석연구원
※관심분야 : ECS(Engineering Control System) Design, Ship Propulsion System Dynamic Simulation
오진석(Jin-Seok Oh)
1989 국방과학연구소 연구원 1996 한국해양대학교(공학박사) 2009년 일본큐슈대학교(공학박사)
2009년 ~ 현재 한국해양대학교 산학연 ETRS 센터 소장
1996년 ~ 현재 한국해양대학교 기관공학부 교수
※관심분야 : Ocean Plant, Monitoring&Control System, Communication System, Energy System