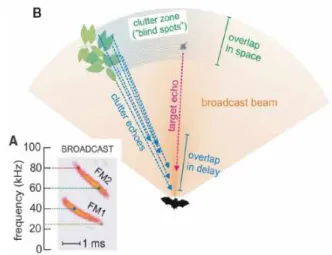
박쥐의 먹이 탐지 전략을 모방한 초음파 센서의 물체 위치 추정
Ultrasound Echolocation Inspired by a Prey Detection Strategy of Big Brown Bats
박 상 욱, 김 대 은
* (Sangwook Park
1and DaeEun Kim
1)
1
전체 글
박 상 욱, 김 대 은
1
수치
관련 문서
그것은 어떤 고상한 곳이나 심오한 곳에서 나타나는 것이 아니라 표면효과(effet de surface)이며, 그 고유한 차원인 표면과 분리할 수 없는 것이다.’ → 의미라는 것은
구하도의 자연하천을 개보수하 여 충적단구를 관통하는 인공하 도 설치. 인공하도에는 둑을 설치한
각자의 문제해결 방식이 다를 뿐 기본적으로 능력에 우열이 있는 것이 아니라는 입장. 어떤 사람은 유능하고 또 어떤 사람은 무능해
산업표준 이하로 감소될 수 있는
이 연구는 웹스크레이핑 방법을 통해 수집한 데이터를 활용하여 어떤 정보를 수집할 수 있고, 어디까지 분석이 가능한지를 살펴보고자 하였다. 또한 웹스크레
● 중소기업이 ①「중소기업기본법」의 규정에 따른 중소기업 외의 기업과 합병하는 경우 ②유예 기간 중에 있는 기업과 합병 ③독립성기준의 요건을 충족하지 못하게
보여주는 장면에서 어떤 특징을 가지고 있고 어떤 기능을 하는지 알아보자.. 스마트 냉장고의
이 같은 것을 통하여 지적장애 학생이 글을 읽고 거기에 나타나는 오류 유형이 어떤 것들이 있고 그것들이 읽기 이해에 있어서 어떤 영향 을 미치는지 알게 된다면