J. Adv. Navig. Technol. 22(6): 591-601, Dec. 2018
위성항법 기반 차로구분 정밀위치결정 인프라 운영/평가 시스템 개발
An Integrated Operation/Evaluation System Development for Lane-Level Positioning Based on GNSS Networks
이 상 우
*· 임 성 혁 · 안 종 선 · 손 은 성 · 신 미 리 · 이 정 훈 · 허 문 범
한국항공우주연구원 기술연구본부 항법기술연구실
Sangwoo Lee · Sunghyuk Im · Jongsun Ahn · Eunseong Son · Miri Shin · Jung-Hoon Lee · Moon-Beom Heo
Navigation R&D Division, Korea Aerospace Research Institute, Daejeon, 34133, Korea
[요 약]
본 논문에서는 위성항법 기반 차로구분 정밀위치결정 인프라 시스템을 효율적으로 운영/평가하기 위한 방법에 대해 논의한다.
정밀위치결정 인프라는 단일 주파수 대역을 지원하는 저가형 위성항법 수신기(사용자)가 차로 레벨의 위치결정 정확도 확보와 위 치정보에 대한 무결성 감시가 가능하도록, 매초 위성항법 거리측정치에 대한 보정정보와 보정정보에 대한 무결성 정보를 제공하 는 시스템이다. 정밀위치결정 시스템의 구조 및 기능과 더불어 인프라 시스템의 구축 현황을 소개하며, 나아가 인프라 시스템을 효율적으로 운영, 관리하고, 인프라 시스템의 성능을 평가하기 위한 인프라 운영/평가 시스템을 소개한다. 이를 이용하여 실제 구 축된 인프라 시스템의 성능을 평가, 분석하며, 결과를 바탕으로 대규모 시스템의 안정적 운영을 위한 요구사항에 대해 논의한다.
[Abstract]
This paper discusses methods to effectively operates and evaluates an infrastructure system for lane-level positioning based on satellite navigation. The lane-level positioning infrastructure provides correction information on range measurements with integrity information on the correction to a user with a single frequency (cheap) satellite navigation receiver in order to perform lane-level positioning and integrity monitoring on the position estimate. The architecture and configuration of the lane-level positioning system are described from the systematic level in order to provide a comprehensive insight of the system. The operation/evaluation system for the integrated infrastructure is then presented. The evaluation results of the real implemented system are provided.
Based on the results, we discuss requirements to increase the system stability from the operation perspective.
Key word :
Global navigation satellite systems, Infrastructure, Lane-level positioning, Network RTK.https://doi.org/10.12673/jant.2018.22.6.591
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-CommercialLicense(http://creativecommons .org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received 28 November 2018; Revised 3 December 2018 Accepted (Publication) 14 December 2018 (30 December 2018)
*Corresponding Author: Sangwoo Lee Tel: +82-42-870-3992
E-mail: [email protected]
Ⅰ. 서 론
최근 교통체계의 효율성 및 안전성 제고에 대한 요구가 급증 하고 있으며, 이에 따른 차세대 지능형교통시스템 (C-ITS;
cooperative-intelligent transport system), 첨단/지능형 운전자 보 조 시스템 (ADAS; advanced driver assistance system) 등의 등장 은 교통 분야의 패러다임 변화를 이끌고 있다 . 이러한 신기술의 등장으로 그간 운전자용 내비게이션 서비스 중심으로 활용되 어 왔던 위성항법시스템 (GNSS; global navigation satellite systems)에 대해서 보다 높은 정확도의 위치정보와 더불어 안 전 서비스를 위한 위치정보의 무결성 정보 제공이 요구되고 있 다[1]-[3].
[1], [4]에서는 C-ITS 및 ADAS 서비스를 위한 위치정보의 요 구 정확도를 도로 (road) 레벨, 차로 (lane) 레벨, 차로 이내 (where-in-lane) 레벨, 총 3 레벨로 구분, 정의하고 있다. 여기서, 정확도는 95% 신뢰 구간의 성능을 의미한다. 도로 레벨은 차량 이 주행하고 있는 도로를 구분할 수 있는 수준의 정확도를 의미 하며, 도로의 환경에 따라 차이는 있을 수 있지만 통상적으로 5m 수준의 정확도를 요구한다. 차로 레벨은 차량의 주행 차로 까지 구분할 수 있는 정확도로 , 차로의 폭이 최대 3.6m 수준(미 국 교통부 기준, 국내 최대 3.5m)에 이르는 점을 고려하여 이에 절반 수준인 1.5m 혹은 그 이상의 정확도를 요구한다[5], [6]. 차 로 이내 레벨은 주행 차로에서도 차량이 어느 지점에 위치하는 지 구분하기 위해 0.7~1m 수준의 정확도를 요구하며, 이에 흔 히 데시미터 (decimeter) 혹은 서브미터 (submeter) 정확도라고 도 불린다 .
아직까지 구체적인 서비스가 개발되지 않았기에 서비스별 요구 정확도는 정의된 바 없으나, 차로 단위의 주행을 고려하여 C-ITS 및 ADAS 서비스를 위한 최소 요구사양으로 차로 레벨 이 고려되고 있다[7]-[12]. 그러나 현재 대중 시장의 상용 위성 항법 수신기(스마트 기기 및 내비게이션에 탑재되는 단일 주파 수용 저가형 수신기)는 도로 레벨의 정확도를 만족하는 수준이 며, 이 외에도 위치정보의 신뢰 여부를 판단할 수 있는 무결성 정보(안전 장치)의 부재로 인해 안전을 담보로 하는 C-ITS 및 ADAS 서비스에 적용이 제한된다. 이러한 한계로 인해 IMU (inertial measurement unit), 영상, 지도 등의 기타 센서를 결합한 연구, 개발이 활발하게 진행 중에 있다[7]-[11]. 최근 국내외 연 구, 개발 현황은 [2], [3]에서 찾아볼 수 있다.
국토교통부는 이러한 요구사항에 따라 교통물류연구사업의 일환으로 1단계(2009년부터 2015년까지), 2단계(20016년부터 2018년까지)에 걸쳐 저가형 위성항법 수신기를 이용하여 차로 레벨 정확도와 무결성 정보 제공이 가능한 차로구분 정밀위치 결정 시스템 연구, 개발(주관 한국항공우주연구원)을 진행해왔 다 [12],[13]. 정밀위치결정 시스템은 복수 개의 위성항법 기준 국(정확한 위치를 알고 있는 위성항법 수신/측정시스템)의 측 정치를 바탕으로 산출한 보정정보와 사용자의 반송파 위상 거 리 측정치를 결합하여 위치를 추정하는 네트워크 RTK
(real-time kinematic) 기술[14], [15]을 기본 바탕으로 하되, 상태 변화량(dynamics)이 높은 육상교통 환경에 적용하기 위해 위치 결정의 속도와 안정성을 높이고, 위치결정에 사용되는 데이터 감시를 통해 사용자단에서 위치정보의 무결성 감시를 수행할 수 있는 보강항법시스템이다. 1단계는 미국의 GPS (global positioning system) 기반 정밀위치결정 시스템 핵심 기술 개발 과 단일 GPS 네트워크 (클러스터) 테스트베트 구축/운영을 통 한 성능 검증을 목표로, 2단계는 1단계 연구결과[13]를 바탕으 로 시스템의 안정성과 가용성 제고를 위해서 다중 위성항법 및 다중 클러스터 지원 기술 개발/구축을 목표로 연구개발이 진행 중에 있다. 단일 클러스터에서 다중 클러스터로 시스템이 확장 되면서, 전체 시스템을 효율적 운영, 관리할 수 있는 기술이 추 가적으로 요구되었다.
이에 본 논문에서는 전체 클러스터 및 클러스터를 구성하는 개별 시스템의 상태 감시, 관리 기능을 수행하는 통합운영국을 소개한다. 통합운영국의 구조와 기능을 설명하고, 이를 이용한 통합 시스템 운영과 평가 방법을 논의한다. 이에 앞서 정밀위치 결정 시스템의 전체 구성과 각 시스템의 역할을 설명하며, 인프 라 시스템의 구축 현황을 소개한다. 그리고 통합운영국을 통한 인프라 시스템의 실제 운영 결과를 바탕으로, 추후 대규모 시스 템의 안정적 운영을 위한 요구사항에 대해 논의한다.
본 논문의 구성은 다음과 같다. Ⅱ장에서는 위성항법 기반 차로구분 정밀위치결정 시스템에 대해 설명하며, Ⅲ장에서는 인프라 시스템의 운영/평가 시스템인 통합운영국과 운영 소프 트웨어를 소개한다. Ⅳ장에서는 인프라 시스템 평가 방법을 설 명한다. Ⅴ장에서 실제 구축한 인프라 시스템의 운용 결과를 평 가, 분석한다. Ⅵ장에서 대규모 시스템 운영 요구사항에 대한 논의와 함께 본 논문의 결론을 맺는다.
Ⅱ. 위성항법 기반 차로구분 정밀위치결정 시스템
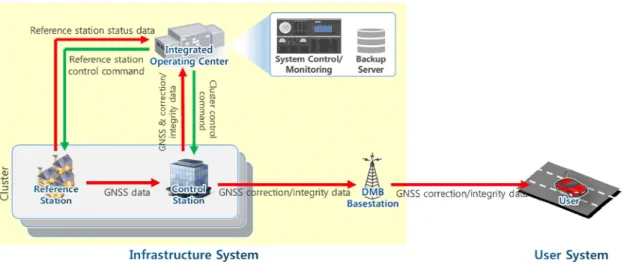
위성항법 기반 차로구분 정밀위치결정 시스템은 그림 1과
같이 인프라 시스템과 사용자 시스템으로 구분된다. 인프라 시
스템은 사용자의 정밀위치결정 지원을 위한 보강정보 (보정정
보, 무결성 정보 포함) 서비스 제공을 목적으로 하며, 사용자 시
스템은 인프라 시스템을 통해 제공되는 보강정보와 자신이 측
정하는 위성항법 데이터를 결합하여 차로 레벨 수준의 위치결
정 및 위치정보의 무결성 감시를 수행한다. 보다 자세하게는,
인프라 시스템의 보정정보는 전리층 및 대류권에 의해서 공간
적 (spatial) 상관관계를 갖는 위성항법 거리측정치의 오차 정보
를 의미하며, 사용자는 이를 이용하여 자신이 획득한 거리측정
치에 포함된 오차를 효과적으로 제거함으로써 보다 높은 정확
도의 위치정보를 획득할 수 있다. 무결성 정보는 정보의 신뢰
여부를 판단할 수 있는 정보로, 흔히 정보의 품질을 나타내는
정보가 이에 포함된다. 인프라 시스템의 무결성 정보는 보정정
보 생성 과정에서 야기할 수 있는 오차의 특성, 그리고 사용자
시스템의 무결성 정보는 측위결과 값에 포함된 오차(위성항법 거리 측정치의 오차 , 보정정보의 오차, 환경 요인에 의한 오차 등 반영)에 관한 추정치로 인프라 시스템과 사용자 시스템의 무결성 정보는 서로 다른 의미를 갖는다.
2-1 인프라 시스템
인프라 시스템은 실시간으로 위성항법 데이터를 측정하는 지역수신국, 복수 지역수신국의 위성항법 데이터의 이상 유무 를 판단하고, 지역수신국 데이터를 바탕으로 사용자의 위치결 정 오차 감소를 위한 보정정보와 보정정보에 대한 무결성 정보 를 생성하는 지역제어국, 지역제어국의 보강정보(보정정보 및 무결성 정보)를 사용자 시스템으로 전달하는 무선 송출시스템 으로 기본 구성된다. 그리고 인프라 시스템의 통합 감시 및 제 어, 즉 운영, 관리 역할을 수행하는 통합운영국으로 구성된다.
무선 송출시스템은 적용 환경에 따라 다르게 구성될 수 있으나, 본 시스템에서는 사용자의 과금 부담을 최소화하기 위해 무과 금으로 이용이 가능한 DMB TPEG (digital media broadcasting transport protocol expert group) 채널을 기본 매체로 사용하도록 개발하였다. 최근 육상교통 환경에서 이용 가능한 통신매체가 다양해짐에 따라, 인터넷 스트리밍 서버 개발을 통해 WLAN (wireless local area network) 또는 이동통신망과 같은 IP
(internet protocol) 네트워크에 대해서도 추가 지원이 가능하도 록 하였다. 이외에도 인프라 시스템의 보강정보 품질과 정밀위 치결정 성능을 감시하기 위한 지역감시국이 추가 구성될 수 있 다.
호주 도로교통협회 (Austroads) 기술보고서[1]와 국제자동자 기술자협회 (SAE; society of automotive engineers) J2735 표준 [16]에 따르면, 교통안전 서비스 적용을 위해서는 도로 레벨 정 확도는 1 Hz, 차로 레벨과 차로 이내 레벨 정확도는 10 Hz의 속 도로 위치정보를 제공할 수 있어야 한다고 규정하고 있다. 관련 업체에서도 최대 10~2 0Hz의 속도를 지원하는 상용 위성항법 수신기 출시를 통해 변화를 대비하고 있다. 인프라 시스템은 1 Hz의 속도로 보강정보를 제공하도록 개발하였다. 실제로 시간 에 따른 보정정보의 변화는 그림 2(천안, 공주, 괴산, 보은 24시 간 GPS 데이터 기준)와 같이 매우 미비하다. 그림 3은 위성 차 폐각이 40도인 환경에서 보정정보의 시간지연에 따른 차로구 분 가용성(위치결정 오차<1.5 m)으로, 여기서 시간지연은 지역 수신국에서 위성항법 측정치를 획득한 시간부터 사용자 시스 템에 도달하는 총 지연을 의미한다. 그림 3을 통해 시간지연이 11초에 이르더라도 차로구분 정밀위치결정 가용성 목표치 92%를 만족할 수 있음을 알 수 있다. 따라서 보정정보는 1 Hz
그림 1. 위성항법 기반 차로구분 정밀위치결정 시스템 구성 및 주요 데이터 흐름Fig. 1. Configuration and data flow for lane-level positioning based on GNSS.
그림 2. 보정정보의 초당 변화율
Fig. 2. Correction information change per second.
그림 3. 보정정보의 시간지연에 따른 차로구분 정밀위치결정 가용성Fig. 3. Availability of lane-level positioning with respect to
time delay of correction information.
로 제공하여도 사용자 시스템은 차로구분 수준의 정밀위치결 정 수행이 가능하며, 오히려 높은 속도로 보강정보를 제공할 경 우, 시스템과 네트워크의 부하를 높여 시스템의 안정성이 떨어 질 수 있다 .
인프라 시스템은 매초 보강정보를 생성, 전송하기 위해 지역 수신국은 매초 위성항법의 데이터를 측정하고, 지역제어국으 로 즉각 전송해야 한다. 지역제어국은 동시간대 측정한 지역수 신국의 위성항법 데이터를 이용하여 보강정보를 매초 생성해 야 하며, 보강정보 생성을 위해서 지역수신국은 이중 주파수 위 성항법 데이터 획득이 가능해야 한다. 지역제어국을 통해 생성 된 보강정보는 무선 송출시스템 (DMB TPEG 혹은 IP 네트워 크)을 통해 사용자 시스템으로 매초 송출되어야 한다[17], [18].
위성항법 수신 환경, 시스템 오류, 네트워크 혼잡 등에 따라 지 역제어국 또는 송출시스템에서의 데이터 수신 간격은 1초 이상 이 될 수 있다. 이러한 환경에서도 시스템의 연속성을 보장하기 위해 지역제어국 또는 송출시스템은 내부 버퍼를 두어, 가장 최 신의 보강정보를 매초 안정적으로 전송하도록 한다. 그러나 사 용자 시스템에서 위치결정의 차로 레벨 정확도를 확보하기 위 해서는 보강정보의 나이, 즉 보강정보 생성에 사용된 데이터가 획득된 시점(지역수신국)부터 지역제어국, 무선 송출시스템을 지나 사용자 시스템에서 위치결정을 수행하는 시점까지의 총 지연 시간이 11초를 초과하면 안 된다(그림 3 참고).
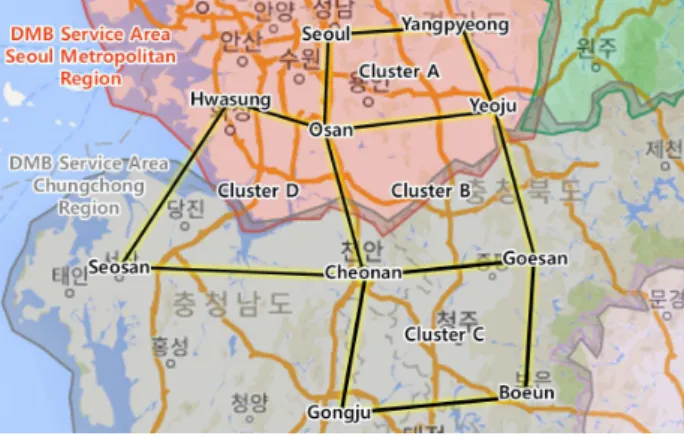
정밀위치결정이 가능한 최소 단위 영역을 클러스터(혹은 GNSS 네트워크)라고 정의하며, 클러스터는 복수 개의 지역수 신국과 1개의 지역제어국으로 구성된다. 클러스터마다 구성하 는 지역수신국의 개수는 상이할 수 있으나, 본 시스템에서는 운영, 관리의 편의성을 위해 클러스터의 지역수신국 개수는 4 개로 통일하였다. 현재는 그림 4에 보이는 바와 같이 총 4개의 클러스터를 구축하였다. 클러스터 A는 서울, 양평, 여주, 오산 으로 구성되며 , 이에 따른 정밀위치결정 서비스 주요 지역은 용 인시, 이천시를 포함한다. 클러스터 B는 오산, 여주, 괴산, 천안 으로 구성되며, 서비스 지역으로 안성시, 음성군, 진천군이 포 함된다. 천안, 괴산, 보은, 공주로 구성되는 클러스터 C는 천안
시와 충주시를, 화성, 오산, 천안, 서산으로 구성되는 클러스터 D는 당진시와 평택시를 서비스 지역으로 포함한다. 이로써 수 도권 이남 지역 및 충청권 중북부를 중심으로 차로 레벨의 정밀 위치결정 서비스를 지원할 수 있다.
전체 서비스 지역은 DMB 수도권과 충청권 채널에 걸쳐 분 포되어 있다. 이에 수도권 채널에서는 클러스터 A, B, D의 보강 정보를, 충청권 채널에서는 클러스터 B, C, D의 보강정보를 동 시 송출함으로써 모든 클러스터의 사용자가 정밀위치결정을 수행할 수 있도록 한다. 사용자 시스템은 IP 서버를 통해 선택 적으로 특정 클러스터의 정보를 요청, 수신하거나, 모든 클러스 터의 보강정보를 요청, 수신할 수 있다.
2-2 사용자 시스템
사용자 시스템은 인프라 시스템으로부터 매초 수신하는 보 강정보(보정정보 및 무결성 정보)를 자신이 측정한 위성항법 데이터와 결합하여 위치결정과 위치정보의 무결성 감시를 수 행한다. 이를 위한 주요 구성은 단일 주파수(L1 대역)의 반송파 위상 기반 거리측정이 가능한 위성항법 수신부, 보정정보 수신 부(DMB 또는 IP 네트워크 접근이 가능한 통신부), 그리고 위치 결정 및 무결성 감시 수행을 위한 처리부를 포함한다.
본 정밀위치결정 시스템에서는 차로 구분 여부를 확인하기 위해 차로 레벨 정밀도로 지도를 탑재한 내비게이션 타입의 사 용자 단말기(그림 5)를 개발하였다. 개발 단말기의 위성항법 수 신부는 미국의 GPS, 중국의 BeiDou, 러시아의 GLONASS (globalnaya navigatsionnaya sputnikovaya sistema) 수신/처리가 가능한 u-blox社 LEA-M8T 칩셋[19]을 사용하였으며, DMB 수 신과 IP 통신을 모두 지원 가능하도록 개발하였다. 정밀도로 지 도는 국토지리정보원에서 구축한 정밀도로 지도 (25 cm 정확 도)[20]를 사용하였다. 본 논문은 인프라 시스템의 운영, 평가 시스템과 방법에 관한 것으로, 사용자 시스템에 대한 자세한 설 명은 생략한다.
Ⅲ. 통합운영국: 인프라 운영/평가 시스템
그림 5. 내비게이션 타입 정밀위치결정 사용자 단말
Fig. 5. Navigator-type lane-level positioning user terminal.
그림 4. 정밀위치결정 다중 클러스터 구성
Fig. 4. Real implementation of multi-clusters for lane-level
positioning.3-1 통합운영국 기능 및 구조
통합운영국은 인프라 시스템을 구성하고, 전체 시스템의 상 태를 실시간으로 감시 , 관리하기 위한 운영의 역할과 동시에 감 시 데이터를 바탕으로 인프라 시스템의 운용 결과를 평가하는 역할을 수행한다 . 평가 결과는 다시 인프라 시스템을 보완하기 위한 기반 자료로 사용함으로써 인프라 시스템의 실시간 운영 을 유지, 확보할 수 있도록 한다. 본 장에서는 통합운영국의 구 조와 주요 기능에 대해 살펴본다.
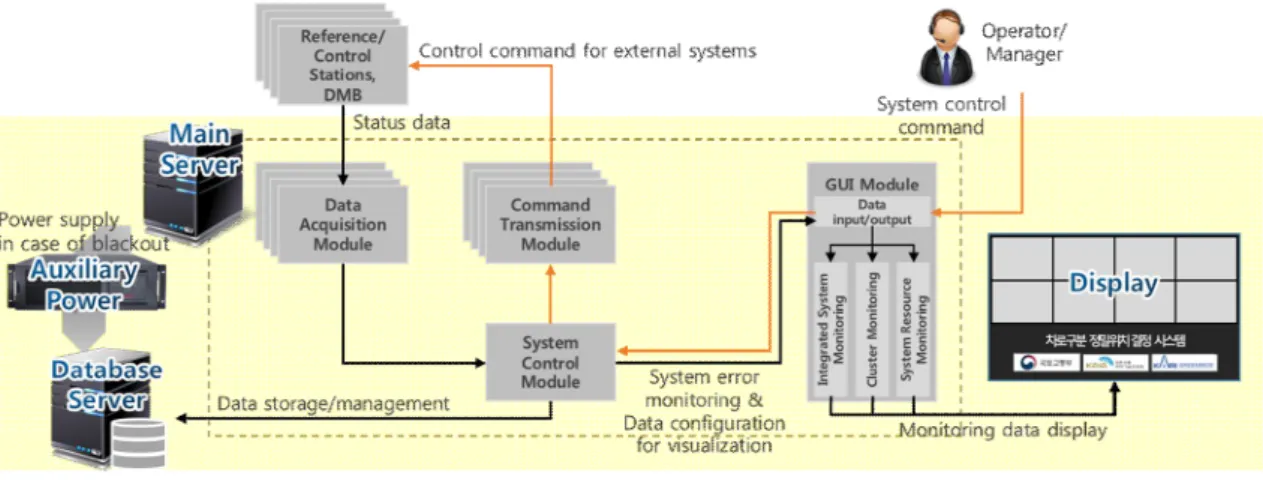
그림 6는 통합운영국의 주요 하드웨어 및 소프트웨어 구조 를 보인다. 하드웨어는 운영, 평가를 위한 메인 서버, 인프라 시 스템의 상태를 시각적으로 표출하는 디스플레이, 연구 및 분석 목적을 위해 데이터를 저장하는 데이터베이스 서버와 유사시 전원 공급을 위한 보조전원장치로 구성된다. 기본적인 운영, 평 가 기능은 모두 메인 서버에서 수행하며 , 이를 위한 소프트웨어 는 크게 4개의 모듈로 구성된다. 데이터 획득 모듈은 인프라 시 스템을 구성하는 지역수신국, 지역제어국, 송출시스템(DMB) 으로부터 상태 데이터를 수신하며, 이를 시스템 제어 모듈로 전 달한다. 시스템 제어 모듈은 데이터 획득 모듈로부터 수신한 데 이터를 바탕으로 각 시스템의 상태와 고장/장애 발생 여부를 감 시하고, 감시 결과는 관리자의 운영 편의성을 위해 GUI (graphic user interface) 모듈을 통해 시각화 또는 시스템 평가 및 연구/분석을 위해 데이터베이스에 저장된다. 또한, 시스템 제어 모듈은 관리자의 시스템 제어 명령을 전달 받아, 해당 시 스템에 대한 적합한 제어가 이뤄지도록 명령어 송신 모듈에 전 달하며, 명령어 송신 모듈이 최종적으로 외부 시스템에 제어 명 령을 내린다.
우선, 통합운영국은 각 시스템의 가동 여부를 판단하기 위해 개별 시스템의 프로세서/메모리/저장장치/네트워크/보조전원 장치 사용량과 소프트웨어 모듈별 처리 지연량을 감시한다. 이 를 통해서 시스템의 하드웨어 및 소프트웨어 동작 여부 및 중단 가능 여부 감시가 가능하다. 지역수신국에 대해서는 위성항법
데이터의 획득 및 이상 여부를 감시하며, 기상정보 및 영상정보 를 추가로 획득하여 지역수신국 설치환경에 대한 감시를 실시 한다. 지역제어국에 대해서는 해당 클러스터를 구성하는 지역 수신국과의 네트워크 연결 및 데이터 수신 여부 확인을 통해 보 강정보 생성에 필요한 원천 정보를 원활히 획득하고 있는지를 감시하며, 보강정보 생성/전송에 연관된 내부 모듈별 처리 지연 량 감시를 통해 정보 생성과 전송의 규칙성을 감시한다. 또한, 지역감시국의 정밀위치결정 수행 결과를 통해 해당 클러스터 의 보강정보 품질을 감시한다. 감시를 통해 발견되는 이상/장애 이벤트는 시각적 표출(디스플레이)로 관리자가 육안으로 인지 가 가능하며, 대응 매뉴얼에 따라 조치가 요구된다. 통합운영국 을 이용한 시스템 감시 및 이벤트 관리 방법은 Ⅳ장에서 설명한 다.
통합운영국의 주요 제어 기능은 클러스터 구성이다. 신규 구 축한 클러스터(지역수신국, 지역제어국)를 등록하거나, 기 구 축 클러스터의 변경 혹은 삭제가 가능하다. 세부적으로는 시스 템 아이디 부여, 시스템 간 네트워크 연결, 시스템 내부 장비 간 통신 설정을 제어하며, 지역제어국에 한해 알고리즘 설계 변수 및 임계 변수 값 변경이 가능하다.
3-2 운영 소프트웨어
인프라 시스템은 클러스터 내 위치한 사용자 시스템이 언제 든지 정밀위치결정을 수행할 수 있도록 끊임없이 유효한 보강 정보를 제공해야 한다. 안정적인 보강정보 서비스 제공을 위해 인프라 시스템의 운영 범위는 구성 시스템 상태 감시 및 점검, 이를 통해 발견되는 이상/장애 등의 이벤트 관리 및 대응을 포 함한다. 운영 대상은 그림 7에서 보이는 바와 같이 인프라 시스 템을 구성하는 지역수신국, 지역제어국, DMB 송출시스템을 포함한다. DMB 송출시스템의 최종 송출부는 기존 방송시스템 을 활용함에 따라, 새롭게 개발된 데이터 수집부와 인코더부를 운영 대상으로 한다.
인프라 시스템은 통합운영국을 통해 일괄적인 상태 감시 및
그림 6.통합운영국 구조
Fig. 6. Configuration of the integrated operation/evaluation system.
제어가 가능함에 따라 , 통합운영국 기반 운영을 기본 전제로 하 며, 다음은 통합운영국 기반 인프라 시스템 운영 방법이다. 통 합운영국 운용 소프트웨어는 통합 모니터링 프로그램, 이상/장 애 등록 프로그램과 유지보수 관리 프로그램으로 구성된다. 통 합 모니터링 프로그램은 각 시스템으로부터 이상 /장애 이벤트 를 수신 혹은 수신한 시스템 감시 데이터로부터 이상/장애 이벤 트 발생 여부를 판단, 감시하고, 발생한 이벤트를 이상/장애 등 록 프로그램을 통해 이상/장애 이벤트를 기록하도록 한다. 유지 보수 관리 프로그램은 해당 이벤트와 관련하여 수행하는 모든 내용(담당자 지정, 진행 사항, 완료 결과 등의 작업 내역)을 기 록, 관리하여 이벤트의 원활한 처리를 위해 사용된다.
1) 통합 모니터링 프로그램
통합 모니터링 프로그램은 Ⅲ장에서 설명한 인프라 시스템 의 전반적인 상태 감시, 점검 및 제어 기능을 수행한다. 모니터 링 프로그램은 그림 7과 같이 관리의 효율성을 위해 GUI로 개
발되었으며, 세부적으로 통합 시스템 모니터링, 클러스터 모니 터링, 시스템 자원 모니터링으로 구분된다.
통합 시스템 모니터링은 ① 클러스터의 구성, ② 각 시스템 장비 동작 상태, ③ 각 시스템 주요 모듈단위 동작 상태 및 이벤 트 발생, ④ 네트워크 전송지연과 ⑤ 고정형 사용자 시스템인 지역감시국의 정밀위치결정 성능을 감시한다. 클러스터 모니 터링은 ① 클러스터별 시스템 상태, 지역제어국의 모듈별 상태 및 지역감시국의 정밀위치결정 성능을 확인하고, ② 클러스터 를 구성하는 지역수신국의 모듈별 상태, 항법위성 데이터 상태 및 정보, 기상 데이터를 확인, 감시하며, ③ 지역수신국의 주위 환경을 감시한다. 시스템 자원 모니터링은 데이터 처리, 연산에 관계된 컴퓨터 자원 및 네트워크 상태를 감시한다. 관리자가 직 관적으로 이상/장애를 감지할 수 있도록 감시 정보는 시각화 표 출되며, 이상/장애 이벤트 발생은 빨강색으로 표기하여 쉽게 인 지가 가능하다.
(a) 통합 시스템 모니터링
(b) 클러스터 모니터링
(c) 시스템 자원 모니터링 그림 7. 통합 모니터링 프로그램
Fig. 7. Integrated monitoring program.
2) 이상/장애 등록 프로그램
이상/장애 등록 프로그램은 이벤트 수집, 이벤트 분류, 이벤 트 등록의 3단계 구조로 동작한다. 이벤트 수집 단계에서는 통 합 시스템 모니터링으로부터 이상/장애 이벤트 정보를 전달 받 으며, 이벤트 분류 단계에서는 수신한 이벤트의 위험도에 따라 우선순위 및 대응/처리를 위한 담당자 등을 분류한다. 이벤트 등록 단계는 유지보수 관리 프로그램에 이벤트 정보(분류 정보 포함)를 등록하며, 이벤트 등록과 동시에 이벤트의 우선순위에 따라 이메일, 메신저 등을 통해 시스템 관리자 및 담당자에게 이벤트 발생을 알린다 .
3) 유지보수 관리 프로그램
유지보수 관리 프로그램은 통합 모니터링 프로그램 및 관리 자가 생성한 이상/장애 이벤트 정보를 저장하고, 체계적인 유지 보수 작업을 관리하는 역할로, 이벤트 정보 저장 기능, 이벤트 발생 알림 기능, 유지보수 스케쥴 관리 기능, 유지보수 이력 관 리 기능, 통계자료 제공 기능을 수행한다. 유지보수 관리 프로 그램은 이상/장애 등록 프로그램을 통해 입력되는 이벤트 정보 를 유형, 우선순위, 담당자 등에 따라 일감 단위로 분류, 저장하 고, 이상/장애 처리 후에도 통계관리를 위해 보관한다. 유지보 수 관리 프로그램에 이벤트 정보가 등록되면, 프로그램은 등록 된 시스템 관리자 및 담당자의 이메일로 관련 정보의 발생 여부 및 유지보수 사항을 송부한다. 유지보수 스케쥴 관리 기능은 이 상/장애 일감별로 시작일자, 완료 시한을 설정하고, 달력, 간트 차트 등으로 진척도 및 기한을 시각화하여 관리의 효율성을 높 인다. 마지막으로, 유지보수 이력 관리 및 통계자료 제공 기능 을 통해 유지보수 관리 프로그램은 이상/장애 이벤트의 발생부 터 처리까지의 내용을 기록하고, 발생 빈도와 진행 상황 등을 그래프를 통한 표출이 가능하다.
인프라 시스템 운영을 위해서는 통합운영국 기반 실시간 감 시 외에도 정기 점검을 실시한다. 정기 점검의 목적은 운영 과 정에서 발생할 수 있는 문제를 사전에 발견하고, 이를 예방하는 것이다. 정기 점검은 다시 일일 점검, 월간 점검, 분기 점검으로 나뉜다. 일일 점검은 하루 동안의 서비스 품질을 점검하기 위해 인프라 시스템의 모듈별 가용성을 점검하며 , 월간 점검은 1개
월 간 시스템의 자원 변화를 확인함으로써 지속적인 시스템 운 용 가능 여부를 판단한다. 자세하게는 시스템별 프로세서/메모 리/저장장치 자원, 네트워크 사용량, 전원 장치를 점검한다. 분 기 점검은 시간에 따른 장비의 노후화 여부 확인이 주된 목적으 로, 시스템 구성 요소별로 동작 상태, 부식 유무, 청결 상태 등을 점검한다. 본 논문에서는 정기 점검 방법에 대한 자세한 내용 은 다루지 않는다.
Ⅳ. 인프라 시스템 평가 방법
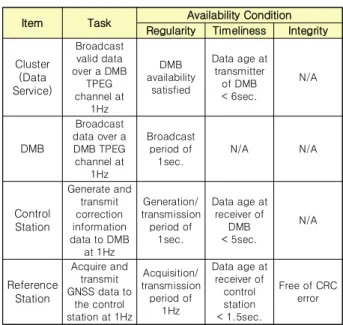
4-1 인프라 시스템 가용 조건
본 장에서는 인프라 시스템 성능 평가 방법에 대해 설명한 다. 앞서 II장에서 설명했듯이, 인프라 시스템의 주 기능은 사용 자 시스템이 정밀위치결정을 수행할 수 있도록 매초 규칙적으 로 보강정보를 제공하는 것이다. 보강정보는 공간적 상관관계 뿐만 아니라, 시간적 (temporal) 상관관계를 갖는 데이터로서 실시간 스트리밍 데이터의 특성을 지닌다. 그로 인해 제공되는 정보는 일정 기간 내에서만 유효하다. 또한, 본래의 기능을 다 하기 위해서는 데이터는 무결해야 한다. 이렇게 보강정보 서비 스 제공을 위해서 모든 인프라 시스템은 규칙성, 적시성, 무결 성을 유지해야 하며 , 모든 조건을 만족해야 시스템은 가용(정 상 동작)하다고 말할 수 있다.
1) 규칙성
지역수신국은 매초 위성항법 데이터를 수집, 지역제어국으 로 전송해야 하며, 지역제어국은 매초 보강정보를 생성하고, 이 는 DMB 송출시스템으로 전송해야 한다. 그리고 DMB 송출시
Item Task Availability Condition Regularity Timeliness Integrity
Cluster (Data Service)
Broadcast valid data over a DMB
TPEG channel at
1Hz
DMB availability
satisfied
Data age at transmitter
of DMB
< 6sec.
N/A
DMB
Broadcast data over a DMB TPEG channel at
1Hz
Broadcast period of
1sec.
N/A N/A
Control Station
Generate and transmit correction information data to DMB
at 1Hz
Generation/
transmission period of
1sec.
Data age at receiver of
DMB
< 5sec.
N/A
Reference Station
Acquire and transmit GNSS data to
the control station at 1Hz
Acquisition/
transmission period of
1Hz
Data age at receiver of
control station
< 1.5sec.
Free of CRC error 표 1. 클러스터 및 시스템 주 기능에 따른 가용 조건
Table 1. Availability definition for cluster and each
system.그림 8. 시스템별 데이터 허용 지연시간
Fig. 8. Upper-bound for data delay (age) at each system.
스템은 매초 최신의 보강정보를 송출해야 한다. 따라서 모든 시 스템은 1초 간격으로 데이터를 획득, 생성, 전송해야 한다.
2) 적시성
그림 3을 통해 보인 바와 같이, 지역수신국에서 획득한 데이 터가 지역제어국 , DMB 송출시스템을 통해 사용자 시스템까지 도달하는데 걸리는 시간 (데이터 나이)은 최대 11초를 초과해서 는 안 된다. 11초는 차로 레벨의 위치결정 정확도와 가용성 목 표를 만족하는 최대 허용지연으로, 사전 실험을 통해 획득한 값 이다. DMB은 인코더단부터 사용자까지 도달하는데 최대 5초 의 처리/전파 지연을 갖는다. 이에 따라 DMB 인코더단으로 송 출하는 시점의 데이터 나이는 6초를 초과해서는 안 된다. 규칙 성에 의해, DMB 수신단부터 인코더단 송출까지의 최대 지연 은 1초이며, 이에 DMB 수신단에서의 데이터 나이는 5초 미만 이어야 한다. 지역제어국의 내부 버퍼에 따른 큐잉 지연과 기타 네트워크에서 발생할 수 있는 지연의 최대치를 3.5초로 한정함 에 따라, 지역수신국에서 획득한 데이터는 지역제어국에 1.5초 이내에 도달해야 한다 . 이에 따른 시스템별 데이터 허용 지연시 간은 그림 8에서 보인다.
3) 무결성
인프라 시스템 간 통신 프로토콜로 TCP/IP (transmission control protocol/internet protocol)을 사용한다. TCP/IP는 통신과 정에서 발생하는 오류에 대한 검출 및 복구를 지원하기 때문에 수신 데이터의 무결성을 보장한다. 다만, 지역수신국은 위성항 법 수신기로부터 시리얼 통신을 통해 수신하는 과정에서 오류 가 발생할 수 있다. CRC (cyclic redundancy check) 검사를 통해 데이터 내 오류 발생 유무를 판단할 수 있으나, 복구는 불가하 다. 이와 같이 규칙성, 적시성, 무결성 기준에 의한 각 시스템별 가용 조건은 표 1과 같다.
4-2 인프라 시스템 성능 평가지표
각 시스템의 성능은 가용성, 에러율, 정지율로 평가한다. 표 1에 따라, 가용성은 전체 운영 기간 동안 시스템의 정상 동작 (모든 가용 조건 만족) 비율로, 에러율은 시스템의 비정상 동작 (가용 조건 불만족) 비율로 정의한다. 복수의 가용 조건 중 하나 의 조건이라도 만족시키지 못할 시, 에러로 판단한다. 정지율은 전원 및 네트워크 차단, 소프트웨어 비정상 종료 등에 따른 시 스템 비가동률을 의미하며, 가용성
·, 에러율
·, 정지
율
·은 다음의 조건을 만족한다 .
·
·
· (1)
(·)은 시스템을 표기하는 인덱스이며, 각 성능지표는 다음으로 정의한다.
· all conditions satis fiedrunning
·×
· any condition dissatis fiedrunn
·×
· shutdown
·×
(2)
위 수식에서
·,
·,
·은 각각 표 1의 가용 조건을 만 족하는 경우, 시스템은 가동 중이나 에러가 발생한 경우, 시스 템 비가동인 경우에 대한 샘플 수이며, 은 운영 기간에 대한 전체 샘플 수이다. 시스템의 성능은 매초 단위로 평가함에 따 라, 운영 일수 × 으로 계산할 수 있다.
Ⅳ. 인프라 시스템 운용 평가
본 장에서는 앞장에서 설명한 통합운영국 기반 운영, 평가 방법에 따라 클러스터 C(보은, 천안, 공주, 괴산)를 운영하고, 그 운용 결과를 평가한다. 2018년 9월 한 달간의 운용 결과를 이용하여 클러스터 C의 시스템을 평가한다.
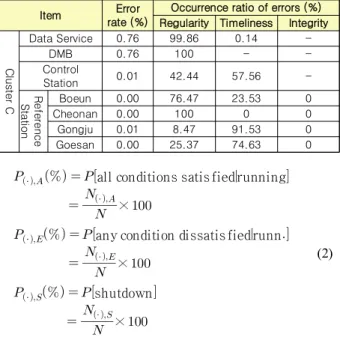
그림 9은 클러스터 C의 4시간 단위 운용 결과를 보인다. 결 과가 노랑색(1)에 가까울수록 단위 시간 당 시스템의 정상 동작 비율이 높음을 의미하며, 반대로 결과가 남색(0)에 가까울수록 단위 시간 당 시스템의 비정상 동작 (에러) 또는 정지 비율이 높 음을 의미한다. 표 2은 클러스터 C를 구성하는 시스템별 에러 율과 에러별 발생 비율을 보인다.
평가 기간 동안 클러스터 C의 시스템은 전반적으로 안정적 인 운용 결과는 보였으나, 일부 시스템에 한해 가동이 중단되는 경우가 발생하였다. 보은 수신국은 9월 12일과 13일 사이에 하 드웨어(무정전 전원공급장치) 고장에 의해 시스템 가동이 중단 되었으며, 공주 수신국은 9월 12일부터 17일 사이에 건물 공사 에 따른 전원차단으로 시스템 가동이 중단되는 사례가 있었다.
이에 따른 시스템 정지율은 보은 수신국의 경우 대략 2.9%, 공 주 수신국의 경우 대략 16.8%에 달했다. 9월 22일에는 DMB 송
Item Error
rate (%)
Occurrence ratio of errors (%) Regularity Timeliness Integrity
Cluster C
Data Service 0.76 99.86 0.14 -
DMB 0.76 100 - -
Control
Station 0.01 42.44 57.56 -
ReferenceStation
Boeun 0.00 76.47 23.53 0
Cheonan 0.00 100 0 0
Gongju 0.01 8.47 91.53 0
Goesan 0.00 25.37 74.63 0
표 2. 클러스터 C 시스템별 에러율과 발생 비율
Table 2. Error rate and occurrence ratio of cluster C.
출시스템 소프트웨어가 메모리 누수 문제로 비정상 종료되었 으며, 28일에는 DMB 운영 정책에 따른 정기 재가동으로 중단 이 발생하였다. 이로 인해 클러스터 C의 보강정보 서비스가 중 단되는 사례가 2차례 있었다.
네트워크 장비 이상/장애로 인해 일시적으로 에러가 발생하 거나 시스템 가동이 중단되는 경우가 있었으며, 이에 의한 에러 발생률은 1% 미만으로 극히 미비한 수준이었다. 천안 수신국 에서 9월 8일과 12일에, 공주 수신국에서 9월 3일에, 괴산 수신 국에서 9월 10일에, 보은 수신국에서 9월 7일에 네트워크 연결 끊김 및 지연이 통합운영국을 통해 감시 및 보고되었다 .
소프트웨어 기능 보완을 위한 유지보수 관리 과정에서 일시 적으로 에러가 발생하거나 시스템 가동이 중단되는 경우가 있 었다. 그러나 유지보수는 30분 이내에서 진행되었으며, 모든 시 스템은 이중화 구조로 운영되어 이에 의한 에러 발생 및 정지율 은 0.001% 미만으로 시스템 가용성에 영향이 거의 없었다.
Ⅴ. 결 론
본 논문에서는 위성항법을 이용한 차로 레벨의 정밀위치결 정 시스템을 통합 운영, 평가하기 위한 통합운영국 시스템을 소 개했다. 통합운영국을 이용한 인프라 시스템 운영 및 평가 방법 을 설명하였으며 , 실제 구축된 클러스터의 운용 결과를 이용하 여 인프라 시스템의 성능을 평가하였다. 9월 운용 기간 동안 인 프라 시스템의 서비스 가용성은 95.23%에 이르렀으나, 사용자 의 안전과 직결되는 기술 및 서비스로의 활용을 위해서는 항공 용 보강항법시스템과 같이 99% 내외 수준의 가용성 만족이 요 구되어야 할 것이다[21]. 운용 기간 중 인프라 시스템의 가용성 을 저하시키는 주요 원인은 하드웨어 고장 및 외부전원 공급 차
단과 같은 물리적 장애였으며, 발생 시 지속성이 수일에 이르렀 다. 통합운영국을 통한 감시는 각 시스템의 감시 데이터 보고 (소프트웨어)를 통해 이루어짐에 따라 통합운영국을 통해서는 극히 일부의 물리적 장애에 한해서만 원인 파악이 가능하다. 따 라서 물리적 장애의 원인 파악을 위해서는 관리자가 시스템 설 치장소에 직접 방문하여 정밀 점검을 우선 수행해야 하며, 이후 원인에 적합한 대응 /조치를 실시하게 된다. 이 과정 속에서 많 은 시간이 소요되기 때문에 대규모 시스템의 안정적 운영을 위 해서는 물리적 장애에 대한 신속한 대응책 마련이 필수적이다.
대응방안으로 지역별로 지사(branch)를 운영하여 시스템에 대 한 관리자의 접근성을 높여 문제 해결에 소요되는 시간을 최소 화하고, 시스템의 장비 상태를 주기적으로 정밀히 검사할 수 있 는 능력을 보유함으로써 장비의 고장을 사전에 예측하고, 교체 할 수 있는 방안이 고려될 수 있다. 그 외에도 외부 네트워크의 침입과 공격에 대한 강인성 확보 및 안정적인 데이터 통신을 위 한 전용망 구성이 안정적 운영을 위한 필수적 요소라고 할 수 있다.
Acknowledgments
본 연구는 국토교통부 교통물류연구사업의 연구비지원 (18TLRP-C113269-03)에 의해 수행되었습니다.
References
[1] ARRB Project Team, Vehicle positioning for C-ITS in Australia (Background document), Austroads, Research
그림 9. 클러스터 C 시스템 운용 결과 (위에부터 서비스, DMB, 제어국, 보은 수신국, 천안 수신국, 공주 수신국, 괴산 수신국)Fig. 9. Availability, error rate, and shutdown rate of cluster C (from top to bottom: cluster service, DMB,
control station, Boeun, Cheonan, Gongju, Goesan reference stations).Report AP-R431-13, Apr. 2013.
[2] E. S. Lee, J. I. Park, S. H. Im, M. B. Heo, and C. H. Yeom,
“Technical trend for performance improvement of GNSS based positioning in land transportation environment,”
Current Industrial and Technological Trends in Aerospace, Vol. 10, No. 1, pp. 179-195, July 2012.
[3] S. H. Im, J. S. An, E. S. Son, S. W. Lee, and M. B. Heo,
“Autonomous driving and GNSS-based precise positioning technology,” Current Industrial and Technological Trends in Aerospace, Vol. 15, No. 1, pp. 151-166, July 2017.
[4] Crash Avoidance Metrics Partnership, Enhanced digital mapping project: Final report, Federal Highway Administration, US Department of Transportation, Technical Report FHWA-JPO-05-073, Nov. 2004.
[5] C. Basnayake, T. Williams, P. Alves, and G. Lachapelle (2010, Oct.). Can GNSS drive V2X?. GPS World [Online].
Available: http://www.gpsworld.com/transportationroadcan- gnss-drive-v2x-10611/.
[6] C. Basnayake, G. Lachapelle, and J. Bancroft, “Relative positioning for vehicle-to-vehicle communications-enabled vehicle safety application,” in Proceeding of the 18
thWorld Congress on Intelligent Transport Systems (ITS World Congress), Orlando: FL, p. 16, Oct. 2011.
[7] inLane: Low cost GNSS and computer vision fusion for accurate lane level navigation and enhanced automatic map generation [Internet]. Available: http://www.inlane.eu/.
[8] M. M. Atia and A. Hilal (2018, May). Lane-level positioning with low-cost map-aided GNSS/MEMS IMU integration.
GPS World [Online]. Available: http://www.gpsworld.com /lane-level-positioning-with-low-cost-map-aided-gnss-mems -imu-integration/.
[9] T. W. Ken and S. Masterson (2018, Aug.). Precise positioning drives lane-level accuracy in automotive industry. GPS World [Online]. Available: http://www.
gpsworld.com/precise-positioning-drives-lane-level-accurac y-in-automotive-industry/.
[10] R. Toledo-More, D. Bétaille, and F. Peyret, “Lane-level integrity provision for navigation and map matching with GNSS, dead reckoning, and enhanced maps,” IEEE Transactions on Intelligent Transportation Systems, Vol. 11, No. 1, pp. 100-112, Mar. 2010.
[11] C. Guo, W. Guo, G. Cao, and H. Dong, “A lane-level LBS
system for vehicle network with high-precision BDS/GPS positioning,” Computational Intelligence and Neuroscience, Vol. 2015, Article ID 531321, p. 13, 2015.
[12] Intelligent transport systems – Network based precise positioning infrastructure for land transportation – Part 1:
General information and use cases definition, ISO 22086-1 (DTR), 2018.
[13] M. H. Son, E. S. Son, E. S. Lee, M. B. Heo, and G. W.
Nam, “Configuration of network based GNSS correction system for land transportation navigation,” Journal of the Korean Society for Aeronautical and Flight Operation, Vol.
21, No. 4, pp. 17-26, Dec. 2013.
[14] G. Fotopoulos and M. E. Cannon, “An overview of multi-reference station methods for cm-level positioning,”
GPS Solutions, Vol. 4, No. 3, pp. 1-10, Jan. 2001.
[15] L. Wanninger (2008, June). Introduction to network RTK.
International Association of Geodesy – Commission 4:
Positioning & Applications [Online]. Available: http://www.
wasoft.de/e/iagwg451/intro/introduction.html/.
[16] Dedicated short range communications (DSRC) message set dictionary, SAE J2735 (201603), 2016.
[17] G. H. Kim, M. H. Son, E. S. Lee, and M. B. Heo, “A method of data transmission for performance improvement of real time GNSS data processing in multi-reference network station,” Journal of the Korean Society for Aeronautical and Flight Operation, Vol. 20, No. 4, pp.
39-44, Dec. 2012.
[18] S. W. Lee, J. S. Ahn, and M. B. Heo, “A messaging protocol for simultaneous transmission of multiple network RTK corrections over a DMB TPEG channel,” in Proceeding of the Institute of Postiioning, Navigation, and Timing (IPNT) Conference 2017, Jeju: Korea, pp. 538-541, Nov. 2017.
[19] NEO/LEA-M8T series: u-blox M8 concurrent GNSS timing modules [Internet]. Available: http://www.u-blox.
com/en/product/neolea-m8t-series/.
[20] [Internet]. Available: http://map.ngii.go.kr/ms/pblictn/
preciseRoadMap.do/.
[21] J.-I. Park, E.-S. Lee, M.-B. Heo, and G.-W. Nam, “Latest
technology trending for satellite based augmentation
system,” Current Industrial and Technological Trends in
Aerospace, Vol. 14, No. 1, pp. 191-202, July 2016.
이 상 우 (Sangwoo Lee)
2009년 2월: 아주대학교 전자공학부 (공학사) 2011년 2월: 아주대학교 전자공학과 (공학석사) 2016년 2월: 한양대학교 전자통신컴퓨터공학과 (공학박사) 2016년 4월~현재: 한국항공우주연구원 항법기술연구실 선임연구원
※관심분야 : 위성항법, 정밀항법, 무선측위, 신호처리
임 성 혁 (Sunghyuck Im)
2003년 8월: 건국대학교 전자공학과 (공학사) 2005년 8월: 건국대학교 전자공학과 (공학석사) 2011년 8월: 건국대학교 전자정보통신공학과 (공학박사)
2011년 12월~현재: 한국항공우주연구원 항법기술연구실 선임연구원
※관심분야 : 항법신호 생성/처리, 실내측위, 항법신호 기만/교란, 항법센서 통합측위 안 종 선 (Jongsun Ahn)
2007년 2월: 건국대학교 기계항공공학부 (공학사)
2009년 2월: 건국대학교 항공우주정보시스템공학과 (공학석사) 2015년 8월: 건국대학교 항공우주정보시스템공학과 (공학박사)
2015년 9월~2016년 12월 : 건국대학교 항공우주정보시스템공학과 박사후 연수연구원 2016년 12월~현재: 한국항공우주연구원 항법기술연구실 선임연구원
※관심분야 : 위성항법, 정밀항법, 무결성
손 은 성 (Eunseong Son)
2010년 2월: 인한대학교 지리정보공학과 (공학사) 2013년 2월: 인하대학교 지리정보공학과 (공학석사)
2012년 12월~현재: 한국항공우주연구원 항법기술연구실 선임연구원
※관심분야 : GNSS 데이터 이상 검출, 미지정수 결정, 정밀측위
신 미 리 (Miri Shin)
2011년 2월: 전북대학교 항공우주공학과 (공학사)
2013년 2월: 서울대학교 기계항공공학부 항공전공 (공학석사) 2014년 2월~현재: 한국항공우주연구원 항법기술연구실 연구원
※관심분야 : 위성항법
이 정 훈 (Jung-Hoon Lee) 2013년 2월: 단국대학교 전자공학과 (공학사) 2015년 2월: 중앙대학교 전자전기공학과 (공학석사) 2015년 3월~현재: 한국항공우주연구원 항법기술연구실 연구원
※관심분야 : 위성항법, 정밀항법, 신호처리
허 문 범 (Moon-Beom Heo) 1992년 2월: 경희대학교 기계공학과 (공학사)
1997년 12월: Illinois Institute of Technology 항공기계공학과 (공학석사) 2004년 12월: Illinois Institute of Technology 항공기계공학과 (공학박사) 2005년 10월~현재: 한국항공우주연구원 항법기술연구실 책임연구원
※관심분야 : 위성항법, 정밀항법, 항행시스템