CopyrightⒸ2011 KSAE 1225-6382/2011/110-0 1 Transactions of KSAE, Vol. 19, No. 2, pp.1-11 (2011)
인휠드라이브 타입 6×6 차량 플랫폼을 위한 시스템 모델링 및 시뮬레이션
이 정 엽1,3)․서 승 환2)․손 웅 희1)․김 창 준2)․한 창 수*2)
한양대학교 메카트로닉스공학과1)․한양대학교 기계공학과2)․(주)현대로템 제어연구팀3)
System Modeling and Simulation for an In-wheel Drive Type 6×6 Vehicle
Jeongyeob Lee1,3)․Seungwhan Suh2)․Woonghee Shon1)․Changjun Kim2)․Changsoo Han*2)
1)Department of Mechatronics Engineering, Hanyang University, Gyeonggi 426-791, Korea
2)Department of Mechanical Engineering, Hanyang University, Gyeonggi 426-791, Korea
3)Control Engineering Team, Hyundai-Rotem Company, Sam-dong Uiwang-si, Gyeonggi 437-718, Korea (Received 25 March 2009 / Accepted 19 October 2010)
Abstract : The skid-steering method that applied a number of mobile robot currently is extremely effective in narrow area. But it contains several problems such as its natural properties, slip, occurred by different direction between vehicle's driving and wheel's rotary. Through this paper, suitable control algorithm of 6×6 skid steering wheeled vehicle and its driving methods are proposed by analyzing the behavior 6×6 skid-steered wheeled vehicle model designed by engineering analysis strategy. To do this, based on a behavior of designed driving system, required torque and other performance of in-wheel type motor system are considered, and finally control algorithm for each wheel is proposed and simulated using this model. To test the proposed vehicle system, driver model is designed using PID closed loop system and included in the total driving control algorithm. The Performance of designed vehicle model is verified by using DYC (Direct Yaw Control) cornering mode and slip mode control to follow the steering input which are essential to evaluate the driving performance of 6×6 vehicle. Proposed modeling strategy and control method will be implemented to the real 6×6 in-wheel drive type vehicle.
Key words : Mobile robot(이동형 로봇), Skid steering(미끄럼 조향), In-hub motor driving(인허브 모터 주행)
1. 서 론1)
최근 환경오염과 에너지문제의 강력한 해결책 으로 전기자동차(Electrical Vehicles)에 관한 관심 이 커져가고 있다. 실제 전기차를 연구하고 개발 하는데 많은 검증과정이 있어왔고, 몇몇의 전기자 동차는 고성능의 모터와 배터리를 적용하여 기존 의 내연기관 엔진차량에 비해 월등한 성능을 발휘 한다. 전기차는 전기공학 및 제어공학측면에서 두 가지의 큰 장점이 있다. 먼저, 전기모터는 내연엔 진보다 훨씬 짧은 시간에 보다 정밀한 제어를 할
*Corresponding author, E-mail: [email protected]
수 있어서 전기자동차에서도 보다 효율적인 ABS(Anti-Skid Braking System)나 동력제어시스템 (TCS: Traction Control System)이 적용될 수 있다.
둘째로, 휠에 내장된 모터를 사용하는 전기자동차 는 각 구동 휠의 토크를 독립적으로 제어할 수 있 어서 차량의 횡 방향 동적 특성 개선에 유용하다.
셋째로, 트랜스미션이나 트랜스퍼케이스 등과 같 은 동력전달요소를 제거하여 차량내부의 공간을 효율적으로 활용할 수 있다.1,2) 인휠 독립구동 전 기식 이동로봇 또는 자동차는 파워트레인 요소를 제거하여 시스템의 효율을 높이는 장점 이외에도 바퀴에 모터를 직접 장착함으로써 회생제동으로
이정엽․서승환․손웅희․김창준․한창수
인한 제동에너지 회수를 극대화함으로써 연비 개 선의 효과를 갖는다. 또한 바퀴에 독립적으로 장 착된 모터의 효율적인 제어를 통하여 주행 안정성 개선이 가능하다.
인휠 독립구동 이동로봇에서의 안정성 제어는 각 바퀴에 장착된 모터를 이용하여 좌우측 바퀴의 토 크차를 발생시켜 선회 운동(Direct yaw moment)를 발생시킴으로써 직접 선회방향 모멘트를 정확히 가 감할 수 있어 한계 영역에서의 안정성이 증가하며 또한 조향과 제동, 구동을 담당하는 액추에이터가 동일하므로 제어성이 향상된다는 장점을 가지고 있 다.3) 본 연구에서는 6륜 이동로봇 모델을 기반으로 하여 MATLAB Simulink®로 각 구성품과 제어로직 을 모델화 하고, 전체 차량모델을 ADAMS®와 연동 하여 선회제어와 슬립제어 성능을 해석하고 검증하 였다.
2. 시스템 모델링 2.1 구성요소 모델링
2.1.1 동적 거동 특성
일반적으로 타이어의 횡력(lateral force)은 이동체 의 선회를 유지시켜주는 역할을 하지만, 회전차 조 향방식에서의 조향에서는 선회를 방해하는 저항요 소로 작용한다. 회전차 조향방식의 구동계에서 아 주 중요한 노면과의 횡방향 마찰력에서 기인하는 동적 특성을 분석하고자 한다. 작용력 와 수직항 력 는 번째 바퀴의 구동 토크()와 중력()과 관계된다. 식 (1)과 같이 는 바퀴()의 토크입력 와 선형관계(linearly dependent)이다.4)
⋅ (1)
Fig. 1은 번째 바퀴에 작용하는 힘의 성분을 나 타낸 것이다. Fig. 16에서 이동로봇 차체의 현가장치 와 과조향 등의 수직방향 동적 특성을 무시하면 식 (2)와 같은 등가 방정식이 된다. 로봇의 총중량 , 중력가속도 와 각 바퀴의 수직항력은 축과 축간의 무게중심이 축간 중심에 위치한다고 가정하여 간단 한 식으로 표현한다. 타이어의 회전저항모멘트는 각 타이어의 횡력과 무게중심까지의 거리의 곱의
Fig. 1 바퀴의 힘 벡터 성분
Fig. 2 인휠독립구동의 동적 거동
합으로 정의한다. 무게 중심으로부터의 거리가 먼 바퀴의 경우 횡력이 동일하더라도 거리가 멀기 때 문에 그 영향이 크게 작용한다.
⇒
⇒
인휠드라이브 타입 6×6 차량 플랫폼을 위한 시스템 모델링 및 시뮬레이션
(2)
2.1.2 6륜 인휠 독립구동 시스템 모델
6개의 각 바퀴에 내장된 구동모터는 로봇의 이동 에 필요한 힘을 충분히 제공할 수 있도록 선정되어 야 한다. 이러한 동력장치는 로봇의 중량분포에 의 한 지면과의 마찰에 의한 종방향과 횡방향 추진력 과 무게중심을 중심으로 발생하는 회전 모멘트가 최고성능을 실현할 수 있는 힘과 속도를 모두 고려 하여야 한다. 추진력과 손실에너지를 모두 극복할 수 있는 유효한 힘은 식 (3)과 같다.
cos
sin
(3)
위의 식에서 모든 바퀴의 유효회전반경()이 같 다면 이동로봇의 힘은 식 (4)와 같이 좌우측 모든 바 퀴의 토크벡터의 조합으로 표현된다.
cos cos
sin sin
(4)
따라서 6륜 인휠 독립구동 이동로봇의 자유체 동 역학 모델은 위에서 고려했던 회전모멘트와 반발력 의 합이 구동모터의 유효한 출력이 되는 식 (5)와 같 이 표현된다.
(5) 위의 식을 기반으로, 구동조건에 따른 용량을 산 출하는 한편, Fig. 3의 특징을 고려하여 아래와 같은 1차 시스템으로 모터를 모델링하였다.
(6)
여기서 는 인휠 모터의 시상수이다. 인휠 모
터는 2500RPM 구간까지 최고 토크 30Nm의 정토크 구간을 가지며, 최고 회전속도는 4000RPM이다.
Fig. 3 인휠 모터 모델 토크-속도 곡선
앞 장에서 수학적으로 모델링한 회전 차 조향방 식의 6륜 인휠 전기식 독립구동 이동로봇의 동적거 동 모델 개략도를 도시하면 Fig. 4와 같다.
8kW급 인휠 모터가 각 바퀴에 삽입되어 있으며, 별도의 조향장치를 이용하지 않고 좌우 인휠 모터
Fig. 4 6륜 독립구동 이동로봇 동적거동 모델
Jeongyeob Lee․Seungwhan Suh․Woonghee Shon․Changjun Kim․Changsoo Han
Fig. 5 인휠모터 모델 (MATLAB Simulink®)
의 구동 토크 차이에 의한 회전차 조향에 의하여 선 회하게 된다.
본 연구에서는 6륜 인휠 이동로봇 개발에 앞서 주 행 및 조향성능 예측, 제어로직 개발 및 검증을 위한 성능 해석시뮬레이터 개발을 위하여 컴퓨터 해석 툴을 이용한 모델링을 수행한다. 모델링은 인휠 모 터 및 타이어와 6개 바퀴의 회전과 3개 방향(x, y, z) 의 운동(9 DOF)에 대한 것이다.5)
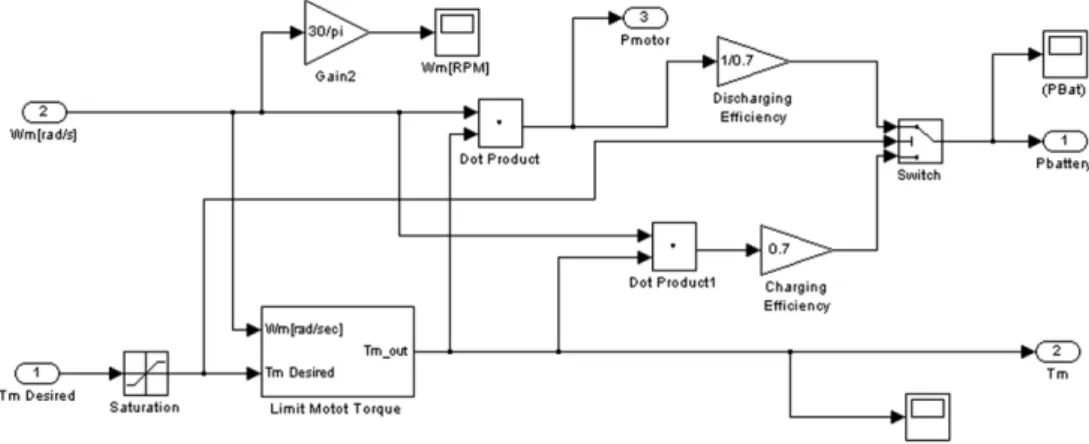
모터 모델은 제어기로부터 모터의 요구 토크 지 령을 전달 받도록 구성되었다. 지령된 요구토크만 큼 배터리로부터 구동에 필요한 동력을 전류로 소 모하게 된다. 인휠 모터는 바퀴와 직결되어 있어 모 터의 회전수는 로봇의 속도와 비례하며, 이동로봇 이 감속하는 경우에는 모터가 발전기의 역할을 수 행하여 제동에너지를 회수하여 배터리에 저장한다.
모터의 출력토크와 전압은 아래와 같다. 는 모터 토크상수, 는 모터역기전력 상수, 는 모터의 회전속도, 는 모터에 공급되는 전류이다. Fig. 5는 위의 식 (7)을 적용하여 구성한 인휠 모터 제어시스 템을 나타내고 있다.
⋅
⋅
(7)
2.1.3 타이어 모델
이동 체의 선회 특성은 타이어에서의 횡방향 접 지력에 따라 달라진다. 실제 타이어의 특성은 타이 어 미끄럼 각이 증가함에 따라 타이어의 횡력이 선
형적으로 증가하다가 일정 미끄럼 각 이상에서는 횡력의 포화현상으로 인하여 비선형적으로 변화한 다. 본 연구에서는 타이어에 작용하는 구동력의 영 향을 고려하여 국제 자동차공학회(SAE)의 표준 비 선형 타이어 모델을 사용하였다.6)
2.1.4 이동로봇 플랫폼 모델
시뮬레이션을 통한 이동로봇의 궤적제어 성능확 인을 위해서는 실제 로봇의 구조와 조건 및 운동 식 을 모델화 하여야 한다. 6륜 독립구동 이동로봇의 속도변화량은 전체중량()과 6개 바퀴의 관성
()에 대한 모터의 유효 작용력()와 주행
저항력()의 비로 아래와 같이 된다.
(8)
자동차 형상을 갖는 본 이동로봇이 주행 중에 받 는 저항력은 구름저항(Rolling Resistance)과 공기저 항(Drag Force) 그리고 등판저항(Grade Resistance) 으로 이루어진다. 은 구름저항계수, 는 공기밀 도, 는 공기저항계수, 는 전면 투영면적일 때 아 래와 같이 나타낼 수 있다.
cos
sin (9)
2.2 제어 알고리즘 2.2.1 알고리즘 개요
관성계에서의 6륜 인휠 독립 구동 이동로봇의 제
System Modeling and Simulation for an In-wheel Drive Type 6×6 Vehicle
Fig. 7 운전자 모델 (MATLAB Simulink®)
어는 기하학제어, 동역학제어, 구동제어로 3개의 하 위 체계로 구성한다.
횡방향의 미끄러짐으로 인하여 이동로봇의 속도 에 미치는 제약이나 영향은 일반적인 조향 메커니 즘을 가진 이동로봇과는 매우 다르다. 따라서 회전 차 조향방식 이동로봇의 기동은 기하학 수준의 제 어만으로는 충분하지 못하여서 동역학 모델을 통한 최적화된 제어알고리즘을 구성해야한다.
6륜 인휠 독립 구동 이동로봇의 동역학 모델은 지 면에서의 슬립과 추진력 등의 수학적 모델과 타이 어, 현가장치 등과 같은 플랫폼 모션과 관계된 구성 품과 물리적인 무게중심이동, 저항력, 회전모멘트 등의 관성모델을 필요로 한다. 하지만, 이러한 모든 제약조건을 포함한 모델의 표현은 매우 복잡해지기 때문에 각 모델이 전체 플랫폼 운동에 미치는 정도 에 따라 중요 요소 모델을 기본으로 수식화 하여 제 어알고리즘에 반영할 수 있다(Fig. 6).
운전자나 자율주행과 같은 상위 제어시스템에서 는 로봇의 현재 상태와 앞으로의 변화 요구량에 대 한 계산에 따른 이동 명령을 수행한다. 이때, 명령
Fig. 6 독립구동 주행제어 구조
된 지령에 따른 전기에너지의 회전에너지 변환은 구동체 드라이버 단계 제어로 이루어지고 동역학 제어단계에서 각 바퀴에 생성된 에너지와 지면과의 마찰에너지 간의 추진력과 요 모멘트를 제어한다.
기구학제어 단계에서는 구동플랫폼의 운동에너지 의 변화량에 따라 관성계에 대해 로봇의 위치가 이 동하는 변화량을 계산하거나 미리 계산된 변화량에 대한 정보를 제공한다.
상위제어시스템에서는 각종 센서로부터 제공된 데이터와 구동제어의 각 서브시스템으로부터 획득 한 데이터로부터 새로운 구동명령을 계산하여 원활 한 주행제어를 할 수 있다.7)
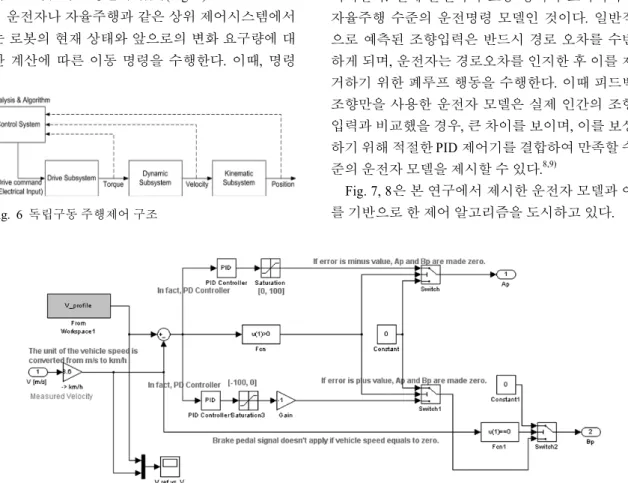
2.2.2 운전자 모델
운전자 모델은, 로봇의 주행모드상의 목표 속도 와 현재의 속도를 비교하여 가속과 감속 또는 제동 명령을 결정하고 선회 목표각을 제공하는 모델을 의미한다. 실제 운전자의 조종 장치의 조작이거나 자율주행 수준의 운전명령 모델인 것이다. 일반적 으로 예측된 조향입력은 반드시 경로 오차를 수반 하게 되며, 운전자는 경로오차를 인지한 후 이를 제 거하기 위한 폐루프 행동을 수행한다. 이때 피드백 조향만을 사용한 운전자 모델은 실제 인간의 조향 입력과 비교했을 경우, 큰 차이를 보이며, 이를 보상 하기 위해 적절한 PID 제어기를 결합하여 만족할 수 준의 운전자 모델을 제시할 수 있다.8,9)
Fig. 7, 8은 본 연구에서 제시한 운전자 모델과 이 를 기반으로 한 제어 알고리즘을 도시하고 있다.
이정엽․서승환․손웅희․김창준․한창수
Fig. 8 운전자 모델 알고리즘
2.2.3 제어기 모델
이동로봇의 전체 거동을 제어하는 상위 제어로직 을 Fig. 9와 같이 구성한다. 바퀴의 미끄러짐 상태를 추정하여 로봇의 종방향 미끄러짐을 방지하는 슬립 제어로직과 선회명령에 따라 좌/우측 모터의 토크 차이를 제어하는 DYC(Direct yaw control), 제자리 선회(Pivot turn) 제어로직 등을 구성하였다. 또한, 주 행 안정성확보를 위하여 측정된 횡방향의 가속도에 따른 종방향의 속도제한을 한다. 전진과 후진 및 제 자리회전에 대한 선택으로 모터에 인가되는 토크와 회전방향이 결정되어야 한다. 또한 상위제어 단계 에서 로봇의 속도와 선회시의 요레이트 등의 귀환 데이터를 처리하여 각 데이터의 처리 단계에 전달 되어야 한다.
Fig. 9 상위제어시스템의 블록 다이어그램
2.2.4 바퀴 운동방정식
이동로봇은 6개 바퀴의 회전 및 세 방향(x, y, z)의 운동(9-DOF)에 대한 운동을 고려하여야한다. Fig. 8 에 전륜 좌측 바퀴의 회전 운동을 도시하였으며, 이 에 따른 회전 운동방정식은 아래와 같다.
_ (10)
는 감속 기어비이고 는 모터 토크 와 관성에너지이다. 은 바퀴의 관성
Fig. 10 전방 좌측 바퀴 운동 다이어그램
력, 회전속도, 타이어 반경과 수직항력을 나타낸다.
바퀴의 구동력을 나타내는 은 Fig. 10의 지면 과 바퀴사이의 마찰계수(μ)에 의하여 식 (7)과 같이 모터의 발생토크와 바퀴의 요구 반발력간의 최소량 을 결정하는 것이다.
× _ (11) 6개의 모든 바퀴에 대하여 적용하여, 식 (3)에서 구한 각 바퀴의 구동력의 x, y 방향의 힘의 평형과 z 방향의 모멘트 평형을 이용하여 세 방향(x, y, z)의 운동방정식을 아래와 같이 모델링한다.
(12)
위의 식에서 f 는 전륜, r 은 후륜, l 은 좌측, r 은 우 측을 의미한다.
2.2.5 슬립제어
Fig. 11은 지면의 상태에 따른 바퀴와 지면간의 미끄럼 비율은 바퀴의 슬립율에 따른 타이어의 마 찰계수를 나타낸다. Fig. 12는 최적의 종방향 구동력 확보를 위해서는 바퀴와 지면간의 슬립율을 15~20%
영역으로 유지해야함을 보여준다. 이를 위하여 각 바퀴의 슬립율을 식 (13)과 같이 구동 시()와 제 동 시()로 정의하고 계산된 슬립율에 따라 목
인휠드라이브 타입 6×6 차량 플랫폼을 위한 시스템 모델링 및 시뮬레이션
Fig. 11 지면 상태별 마찰계수와 슬립율
Fig. 12 슬립율과 구동마찰력
표치 이상일 때에는 각 바퀴의 출력토크를 줄여주어 현재의 바퀴와 지면간의 종 방향 미끄러 짐 현상이 줄어들 수 있도록 구성한다. 비선형 제어 에 널리 이용되고 있는 슬라이딩모드(Sliding mode) 제어 기법을 이용한 것이다. 식 (14)는 목표치()와 실제 슬립율()의 오차()와 그 미분 값으로 슬라 이딩 평면(Sliding surface) 을 설정한 것이다. 이 슬라이딩 평면의 부호에 따라 슬립제어 가중치() 를 식 (15)와 같이 결정한다. 각 바퀴의 인휠 모터의 출력토크는 위의 상위 제어로직에서와 같이 가속명 령에 의한 요구토크와 각 바퀴의 슬립제어 토크 가 중치의 곱으로 계산된다.
⋅
⋅
⋅
(13)
(14)
i f ≥ i f (15)
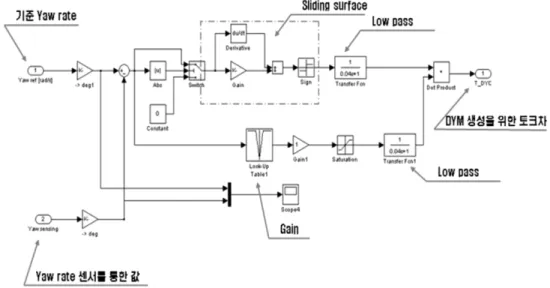
2.2.6 DYC(Direct Yaw moment Control) 선회제어 이동로봇의 선 회시 조향입력에 따른 목표 요레 이트를 추종하기 위하여 좌, 우측 바퀴의 토크 차이 를 생성하여 요모멘트(yaw moment)를 발생시킨다.
여섯 바퀴에 분배되는 로봇의 무게가 동일하다면 Fig. 4와 같이 중립선회 특성을 갖기 때문에 부족선 회계수는 0(understeer coefficient = 0)이라고 할 수 있고, 따라서 조향 각 입력()에 따른 목표 요레이 트()는 식 (16)과 같이 종 방향 속도()와 휠베이 스()의 관계로 계산할 수 있다. 또한 식 (17-18)에서와 같이 요레이트 센서로부터 실제 요레 이트 값()을 받아 그 차이()를 보상하기 위하 여 슬라이딩 모드 제어기법으로 결정되는 요모멘트 가중치()를 이용한다. 이때 max는 모터에 요구할 수 있는 최대 토크 값이다.
(16)
(17)
⋅max (18)
요모멘트 제어의 수학적 모델은 좌우측 토크차이 에 의한 회전모멘트()와 바퀴와 지면사이의 반 력모멘트()의 차이로 수직방향 관성력이 발생함 을 보여준다.
(19)
Fig. 13-14는 회전 차 조향방식의 DYC 선회제어 블록 선도와 슬라이딩 제어 모델을 도시하고 있다.
3. DYC 선회제어 시뮬레이션
양 바퀴의 모터의 토크차이에 의한 회전 차 조향 은 이동로봇의 선회 시 발생하는 선회각속도는 운 전자가 지령하는 조향 각에 대한 차이를 비교하여 양 바퀴의 출력토크차를 제어하는 것이다. 아래의 그림은 지령된 조향명령에 대한 이동로봇의 응답성
Jeongyeob Lee․Seungwhan Suh․Woonghee Shon․Changjun Kim․Changsoo Han
Fig. 13 DYC 슬라이딩 모드 제어 모델(MATLAB Simulink®)
Fig. 14 회전 차 조향방식의 DYC 선회제어 블록 선도
Fig. 15 P제어 요레이트
을 보장하기 위해서 비례미분(Adaptive PD)제어와 단순한 비례(P)제어를 하였을 때에 대한 시뮬레이 션 결과이다. 노면이 미끄러운 얼음판조건( )
Fig. 16 Adaptive PD제어 요레이트
에서 우 방향 선회 각 5도로 조향할 경우이다. 기준 요레이트까지 도달하는데 PD제어가 적합함을 알 수 있다. Fig. 15에서 단순제어로는 상대적으로 큰 이동로봇의 관성과 지면과의 작은 마찰계수에 대한 충분한 요모멘트를 발생할 수 없기 때문에 8초가 지 나서야 추종을 시작함을 알 수 있다. 하지만 Fig. 16 과 같이 개선된 PD 요레이트 제어를 적용한 결과를 나타낸다. 지령된 요레이트 기준치를 바로 추종하 여 일정한 선회 각을 유지할 수 있다. Fig. 17은 제어 가 적용되지 않았을 때의 모터토크가 출렁이는 요 레이트로 인해 불안정한 출력으로 나타남을 보여준 다. 반면에 개선된 DYC 제어에 따라 Fig. 18과 같이
System Modeling and Simulation for an In-wheel Drive Type 6×6 Vehicle
Fig. 17 단순제어 시 모터 토크
Fig. 18 DYC PD제어 시 모터 토크
Fig. 19 선회 궤적( deg )
Fig. 20 선회반경( deg )
안정된 토크차를 갖게 된다. Fig. 19는 각각의 경우 에 대한 선회 궤적을 비교한 결과이다. 결론적으로, PD제어로 요레이트 제어를 하여야만 일정한 요레 이트를 유지하여 선회반경을 일정하게 할 수 있게 됨을 알 수 있다.(Fig. 20)10)
4. 주행제어 시뮬레이션
앞에서 제안된 제어기와 제어 알고리즘 모델로 개발된 성능해석 시뮬레이터를 이용하여 제어로직 의 타당성을 검증해보았다. 일반도로( )에서 는 미끄럼현상이 발생하지 않으므로 슬립제어가 필 요 없다. 따라서 마찰이 적은 젖은 도로( )에 서 차선변경(Lane change)시의 구동력과 요레이트 제어 결과를 살펴보았다. Fig. 21과 Fig. 22는 슬립제 어를 하지 않은 상태의 기준 요레이트에 대한 실제 발생한 요레이트와 그 때 발생되는 바퀴와 지면간 의 미끄러짐 정도를 보여주는 결과이다. 슬립현상 이 심하게 발생하면서 조향이 부드럽지 않게 되고 있음을 알 수 있다. 반면 Fig. 23과 Fig. 24는 슬립제 어를 적용한 경우의 시뮬레이션 결과이다. 동일한 조건에서 바퀴의 슬립율을 일정 수준으로 제어하여 미끄러짐이 없도록 하고 있으며, 조향입력에 대해 서 비교적 잘 추정하고 있음을 확인하였다.
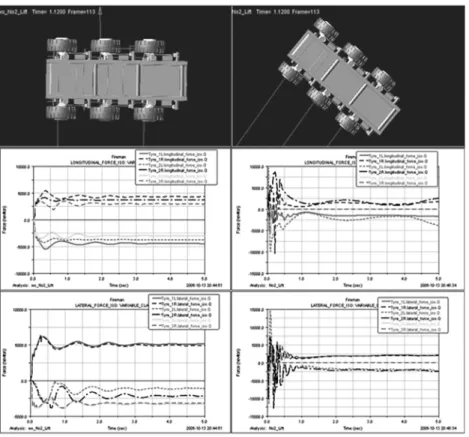
시뮬레이션을 통한 제어기법의 타당성을 검증 하는 것과 더불어 구동 플랫폼 개발을 위한 6륜 인 휠 전기구동 이동로봇 플랫폼의 기동성 및 조향 특 성 분석을 위한 동역학 해석을 수행하였다(Fig. 25).
기동성 분석을 위하여 APG IV 코스 주행을 통한 야 지 주행 특성 및 내부 충격량 분석을 수행하고, 수
이정엽․서승환․손웅희․김창준․한창수
Fig. 21 슬립제어 미적용 시 요레이트
Fig. 22 슬립제어 미적용 시 슬립율
Fig. 23 슬립제어 적용 시 요레이트
Fig. 24 슬립제어 적용 시 슬립율
직 장애물, 참호 통과 성능, 30%, 60% 경사 등판 성 능 및 소요 동력을 추정하였다. 또한 회전차 조향 및 제자리 회전 시 필요한 모터 소요 동력을 산출할 수 있었다.
5. 결론 및 고찰
본 연구는 차륜에 구동용 모터를 삽입하여 각 차
륜의 독립적인 회전력을 제어함으로서, 외부의 기 계적인 장치를 대신하여 차량의 기동성을 제공할 수 있는 회전차 조향방식 차량의 수학적 모델 및 제 어기법을 제시하였다. 기구학적인 제어요소와 동역 학적인 제어요소에 대한 해법을 제시하였고, 동력 을 발생하는 장치에 대한 모델을 기반으로 컴퓨터 시뮬레이션을 수행하였다. 또한 운전자의 조작 및 차량의 운동량에 따른 선회 모멘트 변이와의 차이 를 보상하여 정확하고 신속한 차량의 위치 및 운동 을 제어하기 위한 요모멘트 제어기법을 제안하여 차량의 적절한 거동 구현이 가능함을 확인 할 수 있 었다. 본 연구의 결론을 요약하면 다음과 같다.
독립구동방식 회전차 조향제어를 위한 기구학 모 델제어, 동역학 모델제어, 구동장치 제어 및 상위제 어를 구성하였고, MATLAB®과 ADAMS®를 연계 한 연동 시뮬레이션을 통해 동력장치와 차량의 동 역학 해석과 성능해석 연구를 수행하였다.
회전차 방식 조향을 위해 좌우측 바퀴의 토크차 이에 의해 발생하는 회전모멘트를 제어하는 DYC 기법을 구현하여 주행 및 조향성능을 개선할 수 있 었다.
실제로 필드환경에서는 각 바퀴와 접촉하는 지면 의 다변화로 인하여 지령된 요레이트와 실제 발생 하는 요레이트간의 차이가 발생하게 되는데, 향후 에는 본 연구에서 제안된 기법을 실제 차량에 적용 하여 슬립제어 및 DYC제어를 통해 이러한 요레이 트 오차를 보정함으로서 주행안정성 증대 및 에너 지 손실절감 정도를 정량적으로 평가하고자 한다.
후 기
본 연구는 (한양대학교 고기능로봇매니퓰레이션 연구센터를 통한) 지식경제부/한국산업기술진흥원 융복합형로봇전문인력양성사업 및 HYU 연구특성 화사업으로 지원받아 연구되었음(HYU-2010-T).
References
1) E. Faruk Kececi and T. Gang, “Adaptive Vehicle Skid Control,” Mechatronics, Vol.16, No.5, pp.291-301, 2006.
2) O. Mokhiamar and M. Abe, “How the Four Wheels should Share Forces in an Optimum
인휠드라이브 타입 6×6 차량 플랫폼을 위한 시스템 모델링 및 시뮬레이션
Fig. 25 6륜 독립구동 로봇차량의 동역학 시뮬레이션 해석
Cooperative Chassis Control,” Control Engin- eering Practice, Vol.14, No.3, pp.295-304, 2006.
3) S. Golconda, Steering Control for a Skid- steered Autonomous Ground Vehicle at Vary- ing Speed, M. S. Thesis, University of Loui- siana at Lafayette, 2005.
4) W. E. Dixon, A. Behal, D. M. Dawon and S. P.
Nagarkatti, Nonlinear Control of Engineering Systems, A Lyapunov-Based Approach, Boston:
Birkhäuser, 2003.
5) J.-S. Lee and S.-U. Lee, Electric Vehicle Motion Controls for Independent Driven with 6 In-Wheel Motors, ICCAS2006, Korea.
6) Hans B Pacejka, “Tire and Vehicle Dynamics,”
SAE International, 2 Edn, 2005.
7) J.-S. Lee, J.-Y. Lee, B.-J. Yi and C.-S. Han,
“Skid-Steering Control for an EV with 6- Independent Driving In-Wheel,” KIMST, pp.1063-1068, 2008.
8) S. B. Choi, “The Design of a Look-Down Feed- back Adaptive Controller for the Lateral Con- trol of Front-Wheel-Steering Autonomous High- way Vehicles,” IEEE Transactions on Vehicular Technology, Vol.49, No.6, pp.2257-2269, 2000.
9) C. W. Moon and Seibum B. Choi, “A Study on a Driver Model Considering Human Steering Process,” Autumn Annual Conference of Korean Society of Automotive Engineers, Vol.2, pp.560-567, 2007.
10) J.-M. Kim, R. Lee, J.-S. Lee, J.-Y. Lee and H.-S. Kim, “Motor Control Algorithm for a 6-Wheel Independent Drive Electric Vehicle,”
SICE-ICASE, pp.2416-2419, 2006.