Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography Vol. 33, No. 2, 131-142, 2015
http://dx.doi.org/10.7848/ksgpc.2015.33.2.131
동적네트워크 기반 단일주파수 GPS 관측데이터 모델링을 통한 측량선의 정밀측위 및 자세각결정 알고리즘 구현과
수치실험에 의한 성능분석
Implementation of a Kinematic Network-Based Single-Frequency GPS Measurement Model and Its Simulation Tests for Precise Positioning
and Attitude Determination of Surveying Vessel
이흥규1)· 류시완2) Lee, Hungkyu · Lyu, Siwan
Abstract
In order to support the development of a cost-effective river bathymetric system, this research has focused on modeling GPS observables, which are obtained by array of five single-frequency receivers (i.e., two references and three rovers) to estimate the high accurate kinematic position, and the surveying vessel altitude. Also, by applying all GPS measurements as multiple-baselines with constraining rover baselines, we derived the so- called ‘kinematic network model.’ From the model, the integer-constrained least-squares (LS) for position estimation and the implicit LS for attitude determination were implemented, while a series of simulation tests with respect to the baseline lengths around 2km performed to demonstrate its accuracy analysis. The on-the-fly (OTF) ambiguity resolution tests revealed that ninety-nine percents of time-to-fix-first ambiguity (TTFF) can be decided in less than two seconds, when the positioning accuracy of ambiguity-fixed solutions was assessed as the greater than or equal to one and two centimeters in horizontal and vertical, respectively. Comparing to the GPS-derived attitudes, the achievable accuracy gradually descended in sequence of yaw, pitch and roll due to the antenna geometric configuration. Furthermore, the RMSE values for the baseline lengths of three to six meters were within ±1′for yaw, and less than ±10′and ±20′for pitch and roll, respectively, but those of between six to fifteen meters were less than ±1′for yaw, ±5′for pitch, and ±10′for roll.
Keywords : GPS, Measurement Modeling, Kinematic Positioning, Attitude Determination
초 록
본 논문에서는 저가형 하천측량시스템 개발을 위해 다중의 단일주파수 GPS 수신기를 사용하여 측량선의 정밀 위치와 자세각을 동시에 결정할 수 있는 관측데이터 모델링 기법을 연구하여 기준국 2대와 이동국 3대에서 취득한 GPS 관측데이터와 이동국 기선장을 구속하는 동적네트워크 관측데이터 모델을 도출하였다. 이 모델을 기반으로 정수제약 최소제곱법에 의한 정밀 3차원 위치추정 및 자세각 결정알고리즘을 구현하고 측량구역 2km 내외에 대 한 수치실험을 통해 그 정확도를 분석하였다. 동적모드에 대하여 OTF 연속미지정수결정 알고리즘을 적용한 결과 99.0% 경우에서 2초 이내에 미지정수 결정이 가능하였으며, 이때 추정위치의 평균제곱근 오차는 수평과 수직방향 에 대해 각각 ±1cm와 ±2cm정도였다. 또한 측량선의 기하구조에 대한 GPS 추정 자세각 정확도는 요각, 피치각, 롤 각 순서를 보였으며, 정량적으로 이동국 기선장이 3~6m인 하천측량선을 고려 할 때 요각 ±1′ 내외, 피치 및 롤각 각각 10′과 ±20′ 이상, 이에 반해 기선장 6~15m 정도인 수로조사선의 경우 요, 피치, 롤각에 대해 각각 ±1′, ±5′
그리고 ±10′ 이상 확보가 가능 할 것으로 분석되었다.
핵심어 : 위성측위항법시스템, 관측데이터 모델링, 동적측위, 자세각결정
131 ISSN 1598-4850(Print) ISSN 2288-260X(Online) Original article
Received 2015. 04. 03, Revised 2015. 04. 27, Accepted 2015. 04. 27
1) Corresponding Author, Member, School of Civil, Environmental and Chemical Engineering, Changwon National University (E-mail: [email protected]) 2) School of Civil, Environmental and Chemical Engineering, Changwon National University (E-mail: [email protected])
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://
creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 33, No. 2, 131-142, 2015
132
1. 서 론
하천은 지표수가 모여 중력에 의해 높은 곳에서 낮은 곳으 로 흐르는 물길로 정의될 수 있다. 하천을 통한 유수(流水)의 수리학적 특성은 물길의 종·횡단 형상에 의해 결정되고, 다양 한 재료로 구성된 지형은 흐름이 가지는 에너지에 의해 침식, 퇴적, 이송 등의 다양한 물리적 과정을 거치면서 끊임없이 변 화한다. 지형과 유수의 연속적인 상호작용에 의해 하천의 형 태적 특성은 지속적으로 변화하며, 이러한 하천의 역동성은 수자원관리와 수방재를 위한 하천의 계획, 유지, 관리측면에 서 다양한 문제들을 야기한다. 특히 4대강사업과 같은 대규모 하천개수사업과 대형수리구조물 건설로 인한 국부적 하상변 동과 하천시설물의 안정성 및 기능에 대한 영향이 현안으로 대두되면서, 하천지형의 미시적 구조에 대한 정보와 함께 다기 능보 하류 물받이공과 같은 부속구조물의 변형 및 파손과 하 상침식 등을 파악할 수 있는 충분한 공간해상도를 가지는 정 확한 하천지형정보가 요구되고 있다. 이러한 미시적 하상지형 구조의 현황과 시간에 따른 변화를 파악하기 위해서는 미터 단위 이상의 공간해상도와 센티미터 수준의 정확도를 가지는 3차원 지형정보의 확보가 필수적이다.
하천 저수부의 3차원 지형정보는 GPS(Global Positioning System)와 음향측심기(echo sounder) 조합관측을 통해 취득 할 수 있다(Jung and Kang, 2002; Yun and Cho, 2011; Lee et al., 2014). 이 경우 2차원(평면) 위치는 GPS를 통해 결정하고 하상표고(orthometric height of river bed)는 GPS 추정 타워 체고(ellipsoidal height), 수심(water depth) 그리고 지오이드 고(geoidal height)에 의해 계산 할 수 있다. 수심은 수면과 하 상 사이의 연직방향 거리로 이를 관측하기 위해서는 음향측 심기의 중심축이 중력방향에 정렬되어야 하나 하천의 흐름, 측량선의 운동 및 바람 등으로 인하여 이는 현실적으로 불가 능하다. 이 때문에 수심관측 정확도를 최대화하여 하천공학 분야에서 최근 요구하고 있는 센티미터 수준의 하상 지형정 보 획득을 지원하기 위해서는 모션센서에 의한 자세각 관측 이 필요하다(Kang et al., 2010).
음향측심기의 신속한 3차원 정밀위치결정과 그 실용적 가용성(continuability) 확보를 위해서는 이중주파수 측량 용 GPS 수신기 2대 혹은 VRS(Virtual Reference Station) 서 비스를 이용하는 경우 최소 1대가 필요하다(Jung and Kang, 2002; Lee et al., 2013). 이와 함께 음향측심기 비정렬 오차 보 정을 위해 모션센서를 사용하는 경우 하천측량시스템은 매 우 고가일 수밖에 없다. 그러나 이와 같은 비용적 측면의 문제 는 측량선 정밀위치와 자세각을 단일주파수 GPS 수신기들을
사용하는 시스템 개발로 해결 가능 할 것으로 예상된다. GPS 수신기를 활용한 자세각 결정 연구들은 1990년대부터 최근 저가 센서를 사용하는 문제를 포함하여 국내·외 항법분야에 서 지속적인 연구가 이루어져왔다. 그럼에도 불구하고 이러 한 일련의 연구들에서는 그 목적이 항체(vehicle)에 탑재된 여 러 대 GPS 안테나(수신기)를 이동기선(moving baselines)으 로 고려하여 기준 안테나에 대한 상대위치를 추정하여 자세 각을 결정했기 때문에 정밀위치결정과 관련한 문제를 해결하 지 못하였다(Lu, 1995; Park et al., 1997; Hofmann-Wellenhof et al., 2001; Chun et al., 2005; Moon, 2014). 국내의 일부 연 구들에서 이중주파수 GPS 수신기를 사용하여 항체의 정밀 위치와 자세를 동시에 결정하고자 하는 시도가 있었으나 고 가의 이중주파수수신기 4대 이상의 사용했기 때문에 비용적 측면에서 실용적이 낮은 것으로 판단된다(Park et al., 2000;
Lee, 2004).
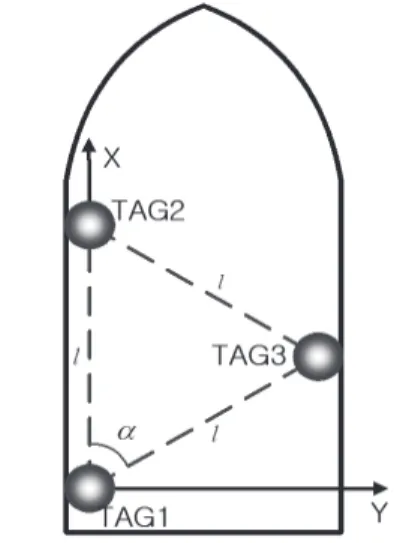
본 논문에서는 다중의 단일주파수 GPS 수신기를 사용 하여 센티미터 수준으로 측량선 위치와 자세각의 결정이 동 시에 가능한 저가형 하천측량시스템 개발을 위한 기초연구 를 이론적 관점에서 알고리즘 개발과 그 성능분석을 중심으 로 연구하였다. 이를 위해 기준국 2대와 이동국 3대의 GPS 관측데이터를 6개의 기선으로 형성한 후 이동국 사이 기선 장(baseline length) 3개를 제약(constraint)하여 측량선이 이 동함에 따라 그 형상이 지속적으로 변하는 ‘동적네트워크 (kinematic network)’ 형태로 관측데이터를 모델링 하였다. 이 와 같은 GPS 관측데이터 모델링 기법의 실세계(real world) 구현의 타당성과 확보 가능한 정확도를 평가하기 위해 정수 제약(integer-constrained) 및 implicit 최소제곱법을 통한 정 밀위치추정 및 자세각결정 알고리즘을 구현하고 수치실험을 수행하였다.
2. 동적네트워크 기반 단일주파수 GPS 관측데이터 모델링
GPS 반송파를 사용하는 상대측위에서 센티미터 수준 측 위 정확도 확보 여부는 미지정수의 성공적 결정 여부에 따 라 좌우된다. 기준국과 이동국에서 각각 관측한 단일주파 수 GPS 관측데이터를 단일기선(single-baseline)으로 모델 링하는 경우 이동중(OTF: On-The-Fly) 미지정수결정 성능 은 이중주파수에 비해 이론적으로 크게 낮을 수밖에 없다 (Teunissen, 1997). 이것은 충분하지 않는 GPS 관측데이터 사 용으로 실수형 미지정수(float ambiguities)들의 상관성이 매 우 높아져 검색공간이 비대칭적으로 왜곡되기 때문이다. 이 와 같은 단일주파수 수신기의 미지정수결정 성능저하 문제를