†교신저자:허성철 ((주)대우루컴즈) E-mail:[email protected] TEL:02-560-6121 FAX:02-523-0248
감성적 인터랙션 디자인 요소로서의 표정 요소에 관한 연구
Study on Facial Expression Factors as Emotional Interaction Design Factors
허성철†
Seong-Cheol Heo†
㈜대우루컴즈 Daewoolucoms Co., Ltd.
Abstract
Verbal communication has limits in the interaction between robot and man, and therefore nonverbal communication is required for realizing smoother and more efficient communication and even the emotional expression of the robot.
This study derived 7 pieces of nonverbal information based on shopping behavior using the robot designed to support shopping, selected facial expression as the element of the nonverbal information derived, and coded face components through 2D analysis.
Also, this study analyzed the significance of the expression of nonverbal information using 3D animation that combines the codes of face components. The analysis showed that the proposed expression method for nonverbal information manifested high level of significance, suggesting the potential of this study as the base line data for the research on nonverbal information. However, the case of 'embarrassment' showed limits in applying the coded face components to shape and requires more systematic studies.
Key words: Emotional interaction, Human robot, Nonverbal information, Facial expression factors
요 약
로봇과 인간의 상호작용에서 언어에 의한 정보 전달은 상호작용의 한계가 있으므로, 더욱 원활하고 효율적인 의사소통과 나아가 로봇의 감정 표현까지 구현하기 위해서는 비언어적 커뮤니케이션이 필요하다.
본 연구에서는 쇼핑을 지원하는 로봇을 전제로 하여 쇼핑 행태에 따른 7가지 비언어적 정보를 도출하였다. 도 출된 비언어적 정보의 요소로서 표정을 선정하고, 2D 분석을 통하여 얼굴 구성요소를 코드화 하였다.
얼굴 구성요소의 코드를 조합한 3D 애니메이션을 이용하여 비언어적 정보의 표현에 대한 유의성을 분석하였 다. 분석 결과, 제안된 비언어적 정보의 표현 방법은 높은 수준의 유의성을 보여 비언어적 정보 연구의 기초자료 로서 활용 가능성이 확인되었다. 다만, '당황'의 경우 코드화된 얼굴 구성 요소의 모양 적용에 한계가 있으며 보 다 체계적 연구가 요구된다.
주제어: 감성적 인터랙션, 로봇, 비언어적 정보, 표정 요소
1. 서론 1.1. 연구 배경
단순한 반복적인 작업을 대신하거나 위험한 작업을 대신하던 로봇의 물리적 기능이 다양하게 확장되고 있으며, 이제는 인간의 복합적인 행동을 지원하고 더 나아가 감성적인 기능까지도 제공하게 되었다. 예를 들어 의료용 로봇이 원격지에서 의사의 시술을 그대 로 재현하거나, 동물과 유사하게 행동하고 반응하는 로봇이 인간의 심리치료와 정서 조절에 활용되고 있 는 것이다. 이와 같이 인간과 작업 영역은 물론 생활 영역을 공유하고 동일 공간에서 다양한 측면의 지원 기능을 수행하는 로봇에게는 개성부여가 필요하고, 인간과의 효과적인 정보 교환과 커뮤니케이션이 요구 되어진다. 효과적 커뮤니케이션을 위해서는 감정 전 달과 같은 감성적 요소의 접목이 필요하다. 감정은 목 표를 결정하는데 있어 중요한 역할을 할 것이며, 내면 적 상태의 의사소통을 가능하게 할 것이다. 또한 개성 은 이러한 목적을 위해 인간이 세상의 다른 사람들과 상호작용하는 방식에 있어 일관성을 보이게 되는 것 을 말한다(Norman, 2001). 이를 좀 더 구체적으로 말 하자면, 인간의 감정은 의사소통의 도구로 사용될 수 있는데, 이러한 감정의 기능 중 하나는 의식적인 정신 과 신체의 무의식적 특성 사이의 커뮤니케이션을 가 능하게 한다는 것이다. 예를 들어 배가 고플 때에 배 가 고픈 감정이 심해지면, 음식을 찾게 되는 반응 행 동 결과를 낳게 되는 것이다. 또 하나의 감정의 기능 은 다양하고 미묘한 행동의 변화가 현 상황 및 미래 의 반응에 대한 의도를 전달하도록 하는 높은 수준의 커뮤니케이션을 가능하게 한다. 또한 개성이란 개념 적인 모델로서, 신념과 의도를 일관된 행동으로 이끌 어내어 준다. 따라서 의도적으로 로봇에 개성을 부여 하는 것은 사람들에게 로봇의 행동 모델을 제공하며, 로봇의 행동에 대한 더 나은 이해를 돕는다. 다시 말 해, 로봇에 대한 개성의 부여는 중요한 디자인 도구가 될 수 있는데, 이는 사람들로 하여금 로봇의 행동을 이해하고 해석하기 위한 개념적 모델을 제공하며, 로 봇과 상호작용 하는데 있어 어떻게 행동하고 지시를 내려야 할지를 제시하기 때문이다(Norman, 2001).
1.2. 연구 목적
로봇이 인간과 동일한 환경에서 공존하기 위해서는 생활공간의 구성요소로써 인간에게 친근감을 주며 인 간과의 효과적인 커뮤니케이션을 통한 기능 수행이 필요하다.
이에 본 연구에서는 로봇 디자인 요소로서의 비언어 적 정보에 대한 사례연구를 통하여 비언어적 정보의 인지 검증과 유효성 분석을 목적으로 한다. 이를 위하 여, 비언어적 정보 중 하나인 얼굴 표정을 대상으로 하 여 감정표현에 적용 가능한 표현을 대응시켜 프레임별 로 단순화 과정을 통하여 기초적인 데이터베이스 모듈 (코드)을 생성한다. 생성된 모듈의 조합을 통하여 표현 되는 각 감정에 대한 표정이 어느 정도 감정의 이미지 를 전달하는가를 직관적 인지 평가를 통하여 검증한다.
2. 비언어적 정보 2.1. 커뮤니케이션과 비언어적 정보
인간의 정보 전달에 있어서는 논리적인 정보 이외 에 비논리적인 감성 정보가 중요한 역할을 하고 있다.
커뮤니케이션에 있어서, 이야기하는 사람의 소리가 가지는 음질과 곡조, 억양 등의 감성 정보가, 언어의 논리적인 정보와는 다른 내용을 전달하는 경우도 있 다. 대면 커뮤니케이션에서는 특히 몸짓과 표정 등의 감성 정보가 추가되는 것에 의해 언어가 전달하는 의 미의 범위가 확대된다.
일반적으로, 타인과 커뮤니케이션 할 때에는, 표정 이나 대화의 내용 등의 상대로부터 제공되는 다양한 판단 정보와, 상대방의 성격․능력 등을 참고하여 상 대가 어떤 행동을 할 것인가를 예측한다. 이 때, 어떠 한 정보에 주목 할 것인가는, 개인의 상황에 따라서 다르겠지만, 상대의 눈을 보면 상대가 의도하는 진의 를 이해 할 수 있는 경우가 많다.
이와 같은 커뮤니케이션에 사용되는 정보로서는 언 어적(verbal) 정보, 비언어적(nonverbal) 정보 등이 있 다. 언어적 정보는 언어 및 문자로 표현되는 정보이 며, 비언어적 정보는 그 외의 형식으로 표현되는 정보 이다. 즉, 비언어적 정보는 표정, 눈빛, 눈의 움직임과
시선, 몸동작, 손동작 등에서 표현되는 정보이다.
대면 커뮤니케이션에 관하여 연구한 Birdwhistell (1970)에 의하면, 메시지 전체 중에서 비언어적 정보가 차지하는 비중은 65 내지 70%이며, Mehrabian(1981)에 의하면 그것은 93% 이상이라고 한다. 이와 같이, 인간 의 대면 커뮤니케이션에는 논리적인 사실 정보보다, 대화 상대의 감정이나 뉘앙스에 관한 감성적인 정보가 중요하다는 것은 명확하다.
2.2. 감성적 커뮤니케이션
보편적으로 사용하는 이메일은 대표적인 언어적 정 보에 의한 커뮤니케이션이다. 예로, 원거리에 있는 지 인에게 어떠한 필요 과정과 방법에 대하여 설명할 때 에는, ‘~을 준비하여, ~까지, ~에 제출해야 합니다.’라 고 하는 설명적인 문장만으로 필요한 정보의 대부분 을 전달하는 것이 가능하다. 그러나 자신이 ‘기뻐하고 있는 것’ 또는 ‘부탁하고 싶은 것’ 등에 관하여 이메 일을 보낼 때에는, 문장만으로 어느 정도의 감정 표현 이 가능하겠지만, 기뻐하고 있을 때의 웃는 얼굴로부 터 느껴지는 기분까지 전달하는 것은 어렵다.
Figure 1. Emoticon
이에 감정 전달의 보조적 수단으로서 이모티콘이 사용된다. 이모티콘은 문자와 기호, 숫자 등을 적절하 게 조합해 미세한 감정과 특정인물, 직업 등의 의미를 전달하는 사이버 공간 특유의 언어이다. 이러한 이모 티콘의 종류는 2천 개에 이르는 것으로 추정되고 있 다. 이모티콘은 미묘하고 다양한 감정 표현을 하는 것 이 가능하고, 자기의 감정을 간단하게 전달하는 것이 능하기 때문에 특히 자주 사용되고 있다(그림 1).
표정 문자의 사용은 애매한 표현으로 오해를 낳는 수도 있지만, 부분적이라도 상대에게 자신의 기분 또 는 감정을 표현하는 것이 가능하다.
커뮤니케이션은 사회생활에 있어서 중요한 기능을 수행한다. 특히, 커뮤니케이션의 대상 및 방법이 변화
된 현대 사회에 있어서는, 직접적으로 대면한 커뮤니 케이션에서 가능한 정도의 정보 전달을 할 수 있기 때문에, 감성을 기본으로 한 커뮤니케이션은 중요한 연구 과제라고 생각된다.
이러한 감성 커뮤니케이션은 언어와 기호로 표현 가능한 논리 정보의 전달과는 다르게 몸동작이나 표정 의 미묘한 변화 등의 비언어적인 수단에 의해서 매개 (媒介)되는 특징이 있다. 감성 커뮤니케이션에 있어서 는, 신체와 얼굴의 움직임의 지각이 중요한 정보이다.
몸동작이나 표정의 미묘한 변화 등의 비언어적인 수단의 역할이 중요한 ‘감성 커뮤니케이션’은 ‘감성 인터페이스’를 위한 시작이라고 생각된다. 커뮤니케 이션의 대상과 방법이 변하고 있다고 하는 것은, 사람 과 사람 사이에 새로운 정보 전달 매체가 등장하는 것을 의미한다. 논리적인 정보 처리를 기본으로 하고 있는 정보 전달 매체에 대하여, 어떠한 감성 인터페이 스를 실현해 갈 것인가가 문제가 된다.
그리고 감성 커뮤니케이션에 있어서의 다른 한 가지 문제는, 이야기하는 사람의 감정이나 기분의 효과적인 전달과 별개로, 자신이 생각하고 있는 것을 어떻게 표 현할 것인가이다. 인간이 사고하고 있는 것을 간단한 언어나 문장으로 표현하는 것은 어렵다. 그 복잡한 사 고의 내용을 효과적으로 표현하는 것도 ‘감성 커뮤니 케이션’의 측면에서 접근해야 한다. 그것은, 인간의 사 고(思考) 과정이, 기억에 의한 지식 베이스만으로 작용 하는 것이 아니라 경험과 기분 등에 의한 감성 반응으 로부터도 영향을 받기 때문이다. 감정과 기분 등을 ‘비 시각적인 감성 정보’라고 하면, 사고(思考) 내용의 효과 적인 표현은 ‘시각적인 감성 정보’라고 할 수 있다.
2.3. 표정
얼굴은 느낌과 감정을 표현하는 제일의 커뮤니케이 터로서 이러한 감성 표현을 표정이라 한다. Ekman과 Frisen(1982)에 의하면 표정은 감성의 질과 성격을 전 달하고, 신체 단서는 감성의 강도를 알려준다고 한다.
개와 고양이와 같은 동물이 외적과 만나서 분노를 나 타낼 때, 반드시 어떤 종류의 음성을 발생한다. 이 때, 음성발생은 목과 입을 중심으로 한 근육의 긴장을 동반 한다. 분노의 표정은 입을 강하게 조이면서 으르렁거리
는 소리를 낼 때의 얼굴의 구조적 상태이다. 분노의 표 정은 자신이 놓인 곤경을 해소하기 위한 공격행동과 연 결되어 있기 때문에, 육식포유동물은 그 다음에 입을 크게 열고 이빨을 드러내고 짖으면서 외적에 달려든다.
즉, 분노의 표정은 '위협'이라는 메시지를 상대에게 전 달한다. 또한, 분노의 표정이 표출될 때는 피부가 긴장 하고 그것에 부속된 것이 기립한다고 한다(Hara, 2003).
자신의 감정을 표출하고 타인의 감정을 이해하는 것 은 커뮤니케이션에 있어서 불가결한 중요한 요소이다.
감정은 인체의 각 부로 표출된다. 그 중에서 '얼굴'이 가 장 잘 그리고 섬세하게 감정을 표출하고 있다. 일상회 화를 하고 있을 때, 사람은 상대가 말하는 말의 의미를 보충하기 위해서가 아니라, 상대의 감정을 특히 자신에 대해 상대가 어떻게 생각하고 있는가를 살피기 위해, 이야기의 방법과 목소리 상태, 얼굴표정의 의미를 꿰뚫 고 언제나 민감하게 파악하고 있다. 희로애락이 확실한 얼굴표정은 쉽게 이해되는데, 몇 가지의 감정이 눈, 입 등 다른 부위에 동시에 나타나거나 또는 눈의 좌우에서 다른 감정이 표출되거나 하면, 얼굴표정에서 감정을 읽 어내는 것은 어렵다. 반대로 얼굴표정은 지극히 복잡하 고 미묘한 감정의 표현을 가능하게 한다고 할 수 있다.
사람과 사람의 대화 과정에서 상대가 자신의 이야 기를 이해해 주었는지 아닌지를 알기 위해 이야기의 단락부분에서 상대방의 얼굴을 본다. 그리고 상대가 눈썹을 찌푸리거나 이마에 주름을 잡으면 자신의 이 야기가 이해되어 있지 않는 것을, 반대로 상대가 '웃 는 얼굴'을 나타내면 이해되었다는 것을 확신한다. 상 대도 이야기의 상대가 자신의 얼굴을 보았다는 것으 로써 이야기의 내용이 서로 확인되었다는 것을 안다.
이렇게 하여 커뮤니케이션이 진행된다.
3. 사례 연구 3.1. 대표 비언어적 정보 도출
본 연구에서 표정의 적용 대상은 쇼핑 공간에서 소 비자의 쇼핑 행위를 지원하는 로봇이다. 이에, 여성 피 험자 4명(주부 2명, 회사원 1명, 대학생 1명)을 대상으 로 대형할인매장에서의 실제 구매 행위에 대한 행동분
석을 하였다. 행동 분석 결과를 바탕으로 구매행위를
‘구매시작’, ‘구매정보 입출력’, ‘이동’, ‘계산’, ‘기타’의 5가지의 상황으로 분류하고 세부적인 구매 행동에 대 응 할 수 있는 서비스 로봇의 기능을 정의하였다.
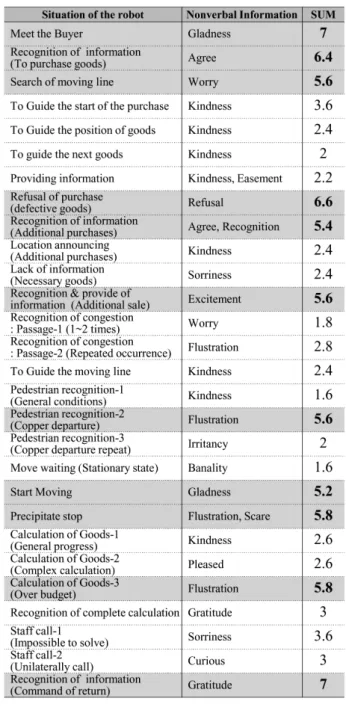
Table 1. Necessity evaluation of non-verbal information for the robot function
그리고 로봇의 각 기능에서 다루어지는 정보와 상 황을 고려하여 기능 수행에 필요한 감정 표현에 해당 하는 비언어적 정보 13개(반가움, 수긍, 고민, 친절함, 거절, 미안함, 신남, 당황, 화남, 따분함, 뿌듯함, 감사 함, 궁금함)를 도출하였다.
도출된 13개의 비언어적 정보를 로봇전문가 5명에
의하여 의미분별 척도법으로 표현의 필요성을 분석하 였다. 분석결과 반가움, 수긍, 거절, 감사함과 같은 정보 는 높은 점수를 받는 것으로 나타났으며, 친절함, 미안 함, 화남과 같은 정보는 낮은 점수를 받고 있다(표 1).
필요성의 평가 결과를 바탕으로 서비스 로봇의 기 능 수행에 접목이 필요한 감정 표현 정보(비언어적 정 보)를 ‘감사’, ‘거절’, ‘고민’, ‘당황’, ‘반가움’, ‘수긍’,
‘신남’의 7가지로 결정하였다. 또한, 13개의 비언어적 정보에 대하여 “쾌-불쾌”의 감정과, “진정-흥분”의 각 성감에 대한 7단계(불쾌:-3, 쾌:+3/진정:-3, 흥분:+3) 직 관적 평가를 실시하였다(표 2).
Table 2. Evaluating the meaning of non-verbal information
즉, 표 2에서 “반가움”이라는 감정표현에 대하여
‘피험자-2’는 ‘쾌(+3)’ 상태와 ‘어느 정도의 흥분(2)’ 상 태로 평가하였다. 이러한 쾌, 불쾌와 각성(흥분), 이완 (진정)의 이차원 공간상에 분포하는 감성 개념의 구조 는 매우 안정적이고 신뢰할 수 있는 틀(김진관, 문혜 신, 오경자, 1998)이라고 볼 수 있다. 여기서 도출된 결과를 X축은 “진정-흥분”으로 Y축을 “쾌-불쾌”로 설 정하여 그래프로 나타내면 그림 2와 같이 3개 그룹으 로 나눌 수 있다.
그림 2에서 Y축 중심으로 보면, ‘Positive’ 그룹과
‘Neutral’ 그룹, ‘Negative’ 그룹으로 나눌 수 있다. 먼 저 ‘Positive’ 그룹은 사용자와의 만남, 헤어짐에 따른 순수 정서를 나타내는 정보로 여기에는 신남, 반가움, 감사함이 해당된다. ‘Neutral’ 그룹은 사용자의 지시,
인지 및 로봇 자체 정보처리 표현으로 수긍, 고민이 해당된다. 마지막으로 ‘Negative’ 그룹은 로봇이 중요 정보에 대한 강한 피드백을 표현하는 것으로 여기에 는 당황, 고민이 해당된다.
Figure 2. The distribution of emotion words
3.2. 비언어적 정보로서의 표정 설계
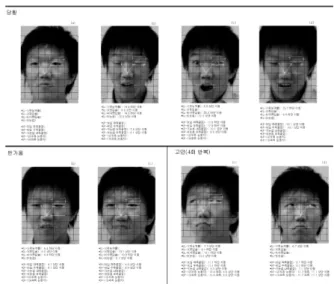
피험자 6명(22세~27세, 남녀 각 3명)을 대상으로 앞 에서 선정된 감정 표현에 해당하는 비언어적 정보(감 사, 거절, 고민, 당황, 반가움, 수긍, 신남)를 각각 표현 하도록 하여 총 42가지(6명 x 7가지 감정)의 표정 샘 플을 도출하였다. 이를 의미분별척도법으로 직관적 평가를 하여 해당 감정 표현에 상대적으로 가장 가까 운 대표 샘플을 선정하였다.
7가지 감정을 각 각 표현한 대표 샘플에 대한 표정 을 의인화된 표정 문자의 방향에서 분석하였다. 인간 의 얼굴은 일반적으로 이마부터 턱까지를 가리킨다.
우리가 보는 얼굴은 3차원의 복잡한 형상을 가지는 두 개골에 30여개의 근육을 매개로 안면피부가 붙어 있는 그 외면형상이 '얼굴'로 되어 있다. 또한 얼굴의 형태적 특징은 각각의 사람마다 고유한 특징이 있다고 말할 수 있다. 본 연구에서는 표정의 분석을 2차원적 측면
에서 접근하였으며, 특히 표정 문자의 특성을 잘 표현 할 수 있는 임의의 기준점과 기준선을 선정하였다.
Figure 3. Reference points and base units
표정 분석을 위하여 그림 3과 같이 입, 코, 눈, 눈썹 등 4가지의 얼굴 구성요소를 중심으로 13개의 기준점 과 8개의 기준선을 선정하였다. 예를 들어, 'SP-5'와 'SP-6'은 입의 양 끝점을 표시하는 기준점이다. 그리고 'SL-3'은 윗입술의 하단 부 라인을 표시하는 기준선이 다. 또한, 기준점 중에서 'SP-1'은 코에, 'SP-2'와 'SP-3'은 두 눈의 내측에 해당하는 것으로서 거의 변화량이 없 는 부분이다. 따라서 이 3개의 기준점을 중심으로 하여 표정 변화량을 계측하였다. 계측 대상은 7가지 대표 샘 플에 해당하는 3명의 피험자 얼굴로 한정하였다.
먼저, 각 대표 샘플에서 표정 변화가 이루어지는 프 레임을 구분하여 각각의 프레임에 대하여 앞에서 설정 한 기준점과 기준선의 변화량을 계측하였다(그림 4).
다음으로 각기 특성이 다른 3명의 피험자의 측정값 을 하나의 기준으로 통일하고 이후에 얼굴의 각 구성 요소를 효율적으로 모듈화하기 위해서, 각 대표 샘플 의 측정값을 [(SP-2)-(SP-3)]의 값이 동일하도록 변경한 후에, [(SP-2)-(SP-3)]의 기본 단위를 '100'으로 설정하여 모든 측정값을 이에 대응되도록 계산하였다. 다음으로 기본단위에 대한 환산이 끝난 데이터를 단순화하였다.
데이터를 단순화하는 방법에 있어 표정의 특징에 영향 도가 높다고 판단되는 두 가지 변화량 데이터의 최대, 최소, 변곡점 등의 특정 데이터에 주목하였다.
Figure 4. Extracting a feature of facial expression
Figure 5. Simplification of data
예를 들어, '고민'의 경우 기본 표정이외에 6단계의 프레임으로부터 특징 변화량 데이터를 측정하였다.
측정된 데이터 중에서 '상단 눈꺼풀'과 '하단 입술'의 움직임이 '고민'이라는 표정에 영향도가 높은 것으로 판단되었으며, 이 두 가지의 데이터를 비교하면 그림 5와 같다. 그림 5의 하단 표에서 '고민 3단계 프레임' 과 '고민 7단계 프레임‘은 두 가지 데이터의 변화에 의하여 변곡점이 형성되며, '고민 5단계 프레임'은 두 가지 데이터의 절댓값 차이가 최대를 이룬다. 다른 관
점에서 보면, '고민 2, 4, 6단계 프레임'은 그 사이의 변화 값으로서 '고민 3, 5, 7단계 프레임'의 자연스런 연속적 변화라고 할 수 있다. 따라서 고민의 경우에는 기본 표정을 제외하고 '고민 3, 5, 7단계 프레임'의 값 을 최종적인 데이터로 선정하였으며, 그 결과 표정 재 현에는 문제가 없음을 알 수 있었다.
이와 같은 데이터 단순화 과정을 통하여, 초기에 기 본 표정 데이터를 포함하여 총 23가지의 데이터 종류 를 13종류로 정리되었다. 최종적으로 정리된 데이터 는 표 3과 같다.
Table 3. Reference point variation of facial expression
또한, 표 3은 데이터의 단순화 과정과 함께 얼굴 구 성요소의 모양을 단순화하는 과정도 진행된 결과다.
표정 분석 초기에 언급하였던 얼굴 구성요소인 '입, 눈, 눈썹'등의 모양을 특정 감정에 관계없이 모듈 개 념으로 코드화하여 표정에 부합하는 감정 표현에 활 용하기 위하여, 데이터를 단순화한 값을 기초로 하여 감정 표현에 필요한 입모양, 눈 모양, 눈썹모양 등을 도출한 뒤 유사성을 보이는 것은 클러스터링 하여 그 평균값을 적용하였다
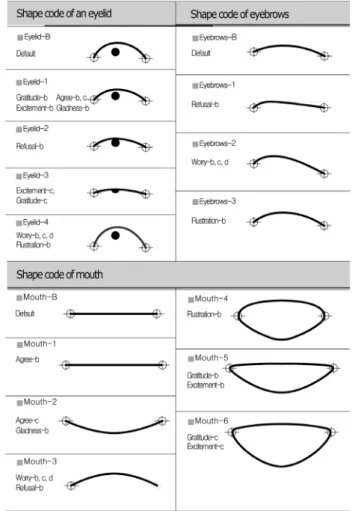
이러한 과정을 통하여 그림 6과 같이 입모양은 직 선모양 2가지, 곡선모양 2가지, 폐곡선모양 3가지를
포함하여 총 7가지의 모양으로 코드화가 가능하였다.
그리고 눈꺼풀 모양은 기본 모양을 포함하여 총 5가 지 모양으로, 눈썹 모양은 총 4가지 모양으로 코드화 가 가능하였다.
Figure 6. Shape code of facial expression
앞에서 정의한 '눈, 눈썹, 입' 모양의 코드를 이용하 여 7가지 대표 감정의 표정에 대한 조합은 표 4와 같 다. 단지, 본 코드 조합이 '감사', '거절', '고민', '당황', ' 반가움', '수긍', '신남'의 7가지 감정에 대해서만 작성 되어 그 한계성이 있을 수 있으나, 추가적으로 필요한 감정이 있을 경우 동일한 표정 분석 방법을 활용하여 신규 코드를 보완한다면 표정에 대한 비언어 정보 데 이터베이스로서 그 활용 가치가 높아질 것으로 판단 된다. 그러나 본 연구에서 다룬 7가지 감정이 (1) 사용 자와의 만남, 헤어짐에 따른 순수 정서 중심, (2) 사용 자의 지시 인지 및 로봇 자체 정보처리 표현 중심, (3) 중요 정보의 강한 피드백(Feed-Back)에 따른 표현 중 심으로 구성 되어있기 때문에 감정 표현의 범위는 충
분하다고 사료된다.
Table 4. The combination of shape code based on emotion
3.3. 비언어적 정보 표현의 유의성 검증
도출된 각 데이터를 3d max 툴을 이용하여 쇼핑지 원 로봇의 형상에 적용하기 위해서 바이메타에 의해 3D 애니메이션 데이터 값으로 입력했다. 데이터 값의 입력을 위하여 표정 데이터는 물론 모션 캡처를 통하 여 얻은 일부 신체적 제스처 데이터들을 수정하고, 모 션빌드(Motion Build) 툴을 이용하여 효율적으로 사용 가능한 데이터 값으로 변환 하였다.
Figure 7. Data animation
또한, 로봇의 동작의 연속성을 보장해 주기 위하여 편집된 데이터를 수정해 주는 것이 필요하다. 로봇의 동작이 끊기는 현상은 모션 데이터가 편집된 부분과 편집되지 않은 부분의 경계에서 발생한다. 이러한 현 상을 해결해 주기 위하여 편집된 모션 데이터가 불연 속성을 보이는 경계부근의 데이터들을 수집하여 보정
해 주었다. 불연속의 경계점에 있는 데이터를 중심으 로 일정 프레임 구간의 데이터들을 수정했다.
이와 같이 유의성 검증을 위한 로봇의 애니메이션 을 제작하기 위해서 3가지 과정을 거쳤다.
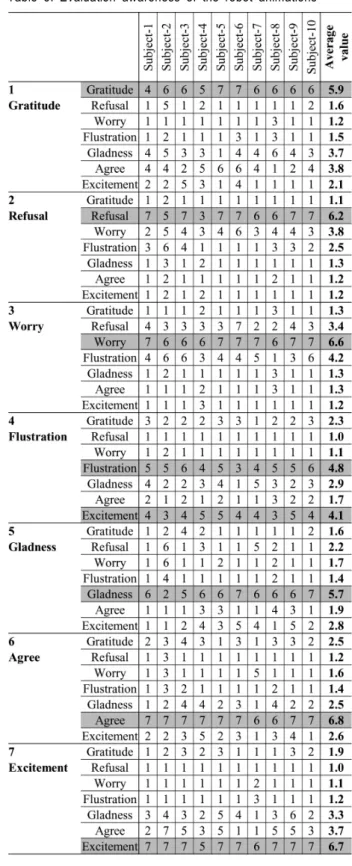
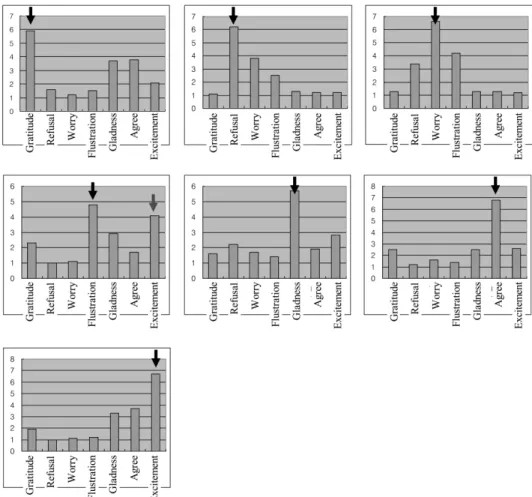
Table 5. Evaluation awareness of the robot animations
Figure 8. Evaluation awareness of the robot animations 우선 모션 캡처 데이터의 관절과 로봇의 관절을 맵
핑시킨다. 그 다음 로봇이 할 수 없는 동작을 보정해 주기 위해 모션 캡처 데이터의 편집 작업을 진행하고, 마지막으로 편집된 모션 데이터가 자연스러운 움직임 을 보일 수 있도록 수정하고, 마지막으로 감정별 표정 코드의 조합 데이터를 적용하였다.
이렇게 해서 완성된 애니메이션(그림 7)을 감정표 현의 대표 샘플을 도출하기 위한 사전 실험과 관련이 없는 피험자 10명(22세~32세, 남녀 각 5명)에게 제시 하고, 연상되는 감정을 7점 척도로 평가하도록 하였다 (표 5). 제시된 개별적인 감정 표현 애니메이션에 대 하여 가장 적합하다고 판단되는 감정을 선택 평가하 도록 하였다. 그 결과 ‘감사’의 애니메이션에서는 ‘감 사함’ 이라는 감정으로 평가된 평균값이 5.9로 가장 높은 값으로 분석되었다. ‘거절’의 애니메이션에서는
‘거절’ 이라는 감정으로 평가된 평균값이 6.2로 가장 높은 값을 나타내며, ‘고민’의 애니메이션에서는 ‘고 민’ 이 6.6, ‘반가움’에서는 ‘반가움’이 5.7, ‘수긍’에서
는 ‘수긍’이 6.8, ‘신남’에서는 ‘신남’이 6.7로 가장 높 은 값을 나타내고 있다(그림 8).
전반적으로는 인간의 감정표현과 로봇의 감정표현 에는 인지의 편차가 적다. 이것은 인간의 감정표현과 로봇의 감정표현에 대한 이미지 차이가 적다라고 할 수 있으며, 인간이 표현하여 전달하고자하는 감정의 이미지가 로봇의 비언어 정보 표현에 의해서도 효과 적으로 전달되는 것이라고 할 수 있다. 또한 의인화된 로봇의 감정 표현이 상당 수준 신뢰성 있음을 반증한 다고 할 수 있다.
그러나 결과에서 주목해야 될 점은 ‘당황’의 애니메 이션에서 ‘당황’의 평균값이 4.8, ‘신남’의 평균값이 4.1로 기록되어서 거의 비슷한 결과를 보여주고 있어 서 ‘당황’ 애니메이션에 대한 문제점을 나타내고 있다 는 것이다.
이러한 결과를 바탕으로 고찰하여보면, 긍정적 이 미지의 감정보다는 부정적인 이미지의 감정을 전달하 는데 있어 단순화된 입모양과 눈썹모양이 부분적으로
인지의 착오를 수반하였다고 할 수 있다. 즉, 인간의 감정표현은 보다 많은 요소의 조합에 의하여 미묘한 감정까지 전달이 가능하며 이에 반해 단순화된 코드 의 조합에는 부분적인 오류의 원인이 내포되어 있다 고 볼 수 있다. 이에 부정적 이미지의 감정 표현에는 코드의 적절성에 대한 검토가 데이터의 단순화 과정 과 함께 이루어져야 한다.
이것은, 개념적으로 의미가 있는 어휘에 대한 직관 적 이미지 평가와 인지 대상의 특정 움직임에 대한 인지적 이미지 평가는 인간의 사전 학습에 의해 형성 된 이미지 공간의 범위를 크게 벗어나지 않는다고 할 수 있다. 다시 말하면, 인위적 비언어적 정보의 표현 방법에 대한 연구에 있어서, 인간이 경험에 의하여 형 성하고 있는 이미지의 구조에 대한 기초 연구도 동반 되어야 보다 효과적인 결과를 도출할 수 있다고 이야 기할 수 있다.
4. 결론
로봇은 기계, 전자, 통신 등의 기술이 유기적으로 결합되어 인간행동을 자동으로 수행해주는 시스템을 말한다. 이때, 대신해 주는 노동의 종류에 따라 산업 용 로봇과 서비스 로봇으로 구분된다. 산업용 로봇은 조립, 용접 등의 제조활동을 수행하는 로봇이며, 서비 스 로봇은 인간과 상호작용하면서 생활, 교육 등 다양 한 서비스를 제공하는 인간 지향적 로봇이다.
특히, 서비스 로봇의 경우에는 인간과 로봇사이의 커뮤니케이션을 위해서 로봇은 사람의 의도를 파악하 고 이에 적절히 대처할 수 있도록 하여야 한다. 이를 위해서 사람과 로봇의 원활한 커뮤니케이션을 위한 인터랙션이 필요한 것이다. 이에, 언어에 의한 정보 전달은 인터랙션의 한계가 있으므로 더욱 원활하고 효율적인 의사소통과 나아가 로봇의 감정 표현까지 구현하기 위해서는 비언어적 정보를 활용하는 것이 필요하다.
본 연구에서는 쇼핑과정을 지원하는 서비스 로봇을 가상으로 설정하고, 서비스 지원 과정에 필요한 7가지 비언어적 정보를 도출하였다. 비언어적 정보로서는 표정을 중심으로 얼굴 구성요소를 코드화 하여 비언
어적 정보 표현의 유의성을 분석하였다. 분석 결과, 제안된 비언어적 정보의 표현 방법은 유의성을 보여 향후 로봇 디자인개발에 있어 감성적 인터랙션 디자 인 요소로서의 활용 가능성이 확인되었다. 또한 다른 제품이나 시스템의 개발에 있어 감성적 인터랙션 디 자인 적용을 위한 기초 가이드라인으로 충분히 활용 될 수 있을 것이다. 다만, 유의성 검증에 있어 보다 많 은 피험자에 의한 보편적 객관성 확보가 필요하다. 특 히, 당황과 같은 부정적 이미지 전달이 필요한 감정 표현에는 단순화 과정을 통해 코드화된 얼굴 구성 요 소의 조합 적용에 한계가 있으며 보다 더 체계적 연 구 적용이 요구된다.
REFERENCES
Kim, J. K., Moon, H. S. & Oh, K. J. (1998).
Validating the Stability of Two-dimensional Structure of Emotion, Korean Journal of the Science of Emotion & Sensibility 2(1), 49-50
Birdwhistell, R. L. (1970). Kinesics and context, Philadelphia: University of Pennsylvania Press.
Ekman, P. & Frisen, W. V. (1982). Measuring Facial Movement with the Facial Action System. In P.
Ekman (2nd Eds.), Emotion in the Human Face, New York: Cambridge University Press. 178-211 Hara, H. (2003). Intelligence that face - Emergence of
"artificial emotion " by the face robot, Kyoritsu Shuppan Co., Ltd. 25
Mehrabian, A. (1981). Silent messages: Implicit communication of emotions and attitudes (2nd Eds.), Belmont, California: Wadsworth
Norman, D. (2001). How Might Humans Interact with Robots?, Keynote Speech, Final Report for DARPA/NSF Workshop on Human-Robot Interaction.
원고접수: 2014.11.10 게재확정: 2014.11.19