해양 파력 발전 시스템 설계를 위한 부유체 거동에 관한 연구
Kui Ming Li 1 ․Nanjundan Parthasarathy 1 ․박영규 1 ․정호윤 1 ․최윤환 2 ․이연원†
(원고접수일:2011년 6월 15일, 원고수정일:2011년 6월 28일, 심사완료일:2011년 7월 5일)
Study on the Motion of Floater Structure for Design of Wave Energy Generation in Ocean
Kui Ming Li
1
․Nanjundan Parthasarathy1
․Young-Kyu Park1
․ Ho-Yun Jung1
․Yoon-Hwan Choi2
․Yeon-Won Lee†요 약 : 해양 파력 발전 시스템의 설계를 위하여 본 연구에서는 6-자유도운동해석 기법을 적용한 3차원 CFD 해석으로 두 개의 부유체에 대한 거동을 유입되는 파의 성질에 따라 해석하였다. 수조모델내에서의 파의 생성형상을 현재 실험에서 가장 많이 사용되는 피스톤 형식의 조파기와 동일한 형태의 파를 생성하 였으나 얕은 수심으로 인하여 바닥면에서 생성되는 에크만 경계층에 의해 파의 에너지가 감쇄되는 현상 을 보였다. 생성된 파를 이용하여 파장에 따른 부유체의 거동을 계산한 결과 파장이 5m인 경우 부유체의 최대 진폭은 0.3m, 파장 1m인 경우 최소 진폭은 0.15m 그리고 파장 6m인 경우 부유체간 최대 거리는 1.06m로 계산되었다.
주제어 : 파력 에너지, CFD, 6자유도, 부유체, 파장
Abstract:
In order to design a wave energy generate system, a 6-Degree of freedom motion analysis technique was applied to the three-Dimensional CFD analysis on two floating body and the behavior was interpreted according to the nature of the incoming wave. The waves are generated by the same type of wave in the model of tank using the piston type, but due to the shallow water that is generated from the bottom of the wave energy is attenuated by Ekman boundary layer. According to the wavelength of waves generated by the result of evaluating the behavior of floating body, it is concluded that 0.3m is the maximum amplitude of wavelength of 5m, and 0.15m is the minimum amplitude of wavelength of 1m.1.06m is the maximum distance between the two floaters of wavelength of 6m.
Key w ords:
Wave Energy, CFD, 6-Degree of freedom, Floater, Wavelength†교신저자
(
부경대학교 기계자동차공학과, E-mail:[email protected], Tel: 051-629-6162) 1
부경대학교 대학원 메카트로닉스공학과2
부경대학교BK21
스마트기계 사업팀1. 서 론
파력에너지는 공해가 없는 풍부한 신재생에너지 로 전 세계 해양에는 8,000-80,000TWh/yr (혹은 1-10TW)의 파력에너지가 저장되어 있다[1]. 신재생 에너지 개발이 요구됨에 따라 세계 여러 나라에서 파력에너지에 관한 많은 연구가 진행되고 있다. 최 근에 파력을 이용한 에너지생성 개발기술도 다양
하게 발전되고 있는 상태이다.
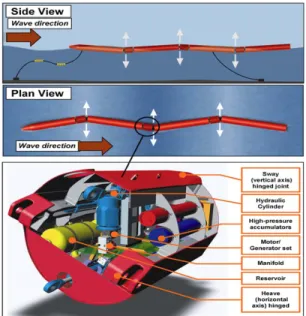
파력에너지를 변환하는 시스템 중에서 Figure 1 의 펠라미스 시스템(Pelamis system)은 영국의 펠라 미스사에서 최초 개발한 것으로 2004년 스코틀랜 드에 길이 120m,직경 3.5m 그리고 750kW 전력을 공급 가능한 시제품 펠라미스 시스템을 설치하였 다[2]. [3]의 연구에 의하면 펠라미스 시스템은 파
력에너지를 변환하는 다른 시스템에 비해 발전효 율도 높다고 언급하였다. [4] EMINENT software tool을 이용하여 해석한 결과 펠라미스의 기술이 응용될 경우 파력에너지자원의 이용이 더욱 큰 스 케일에서 사용될 수 있을 것이라고 예측하였다.
Figure 1: Schematic diagram of Pelamis system
특히 펠라미스 시스템은 효율이 높고 시설비가 적게 들며 유지보수가 용이하므로 유망한 해양 에 너지 자원으로 판단되며 향후 펠라미스 시스템에 대한 응용분야 또한 성장해 나갈 것으로 전망된다.
그리고 에너지자원이 고갈되는 위기 하에 지속적 인 발전을 이어가려면 해양 파력에너지를 이용한 발전시스템 설계가 꼭 필요하다고 생각된다.
Figure 2: Pelamis type power generation system
펠라미스 시스템의 발전원리는 Figure 2와 같이 파력에 의한 연결된 다단식 부유체의 관절부에서 상-하, 좌-우로 출렁거리며 발전시스템내부에 장착
된 유압 실린더의 피스톤이 일정한 행정을 유지하 며 왕복운동하며 일을 하게 된다. 피스톤의 일은 고압의 유압에너지를 생산하며 만들어진 고압유는 유압모터를 통해 이동할 때 연결된 회전차가 회전 하면서 전기를 생산하는 시스템이다.
펠라미스 시스템과 같은 대형 해양 발전시스템 을 설계하려면 파의 성질에 따른 다단식 부유체 운동에 관한 기술 구축이 필요하며 부유체의 상호 작용에 의한 발전시스템 내부에 장착된 유압 피스 톤의 주행 거리에 따른 발전시스템의 최적화 설계 가 결정될 것으로 판단된다. 그러므로 본 연구에서 는 CFD를 이용하여 수치해석 수조모델 내에서의 파의 생성현상을 구현하였고 파장의 변화에 따른 두 부유체의 거동을 시간에 따른 변위와 회전 각 도를 계산하여 비교 분석하였다.
2. 수치해석
파의 주기적인 변화에 따라서 자유표면에의 거동 을 해석하기 위하여 물과 공기 2상의 유체에 대한 해석을 수행하였으며 해석을 위하여 본 연구에서는 상용해석코드인 ANSYS CFX-13을 이용하였다.
2.1 지배방정식과 난류모델
유동장 해석에 사용된 지배 방정식은 다음과 같 다.
연속 방정식:
∇∙
(1)운동량 방정식:
∇∙
⊗
∇ ∇∙
(2)여기서,
는 유체의 밀도, 는 유체의 속도,
는 압력,
은 외력에 해당한다. 본 운동량 방정식 에서 전단응력은 ∇
∇
∇∙
로 정의하였다.본 연구에 적용된 등균질(homogeneous) 모델은 다상유동에서 각각의 작동유체가 공간상에 점유하 고 있는 체적비로서 밀도 및 유체 상호간에 전송 되는 물리량을 나타내는 모델로 전송방정식은 다
음과 같다.
∇․
∇
(3)위 식에서
, ,
는 다음과 같이 정의할 수 있다.
(4)
(5)
(6)각각의 유체는
등으로 나타내고
는 상 (Phase)의 총 수, 각 유체의 체적비, 밀도, 속도, 확 산계수는 각각
,
,
,
이다.난류모델(SST, Shear Stress Transfort)에 대한 난 류운동에너지 및 난류파장에너지 방정식은 아래와 같다.
난류운동에너지(
) 방정식
(7)난류파장에너지(
) 방정식
(8)
난류모델에 적용된 난류점성계수
는 다음과 같 다. max
(9)
식 (7)~(9)에 나오는 계수들은 각각
,
,
,
,
,
,
,
,
로 설정하였다.2.2 Rigid Body 지배 방정식
부유체의 강체운동을 정의하는 운동방정식은 아 래와 같다.
(10)
(11)위의 수식에서 는 강체의 병진운동(Translation)변 화율,
는 강체의 각운동 모멘트의 변화율이다, 는 부유체에서의 힘,
는 토크이다. 따라서 병진운동 에 대한 방정식은 뉴튼의 운동법칙에 따라 아래와 같이 정의할 수 있다.
(12)
는 강체의 무게중심에 대한 변위,
은 질량,
이다.
는 공기력,
는 중력 가속도,
는 선형 스프링 상 수,
는 외력이다.회전운동 방정식:
×
(13)
(14)
(15)
(16)
여기서,
는 공기의 토크,
는 회전 스프 링 상수,
는 강체를 지배하는 외부 토크이다.는 질량 관성모멘트 행렬이다. 위의 질량 관성모 멘트 행렬의 수식에서 강체(rigid body)의 중심부의 질량이
이고,
은 질량에 대한 편미 분이다.2.3 경계조건 및 해석 조건
Figure 3과 같이 왼쪽벽면은 파를 생성하는 역할
을 하는 좌우로 이동하는 피스톤 wall로 가정을 하 였고 위쪽벽면은 열린면으로(Opening type) 설정하 였다. 오른쪽 출구면(Outlet)에서는 깊이에 따른 정 수압
를 부여하였고 바닥은 고체벽면으로 가정하여 점착조건(no-slip)을 적용하였다. 그리고 자유표면에서의 거동을 해석하기 위하여 식 (3)∼(5)에 제시한 바와 같은 등균질 다상유동모델을 사 용하였다.
Figure 3: Computational domain and boundary
condition해양에서 발생하는 파를 구현하기 위하여 주로 많이 사용되는 피스톤 식 조파기의 파 생성 원리 를 적용하였으며 피스톤 행정(stroke) 변화에 따라 생성되는 파는 아래와 같은 수식으로 정의할 수 있다[5].
cosh
sinh
(17)여기서,
는 피스톤 wall의 행정, 는 파고,
는 파수, 은 파장,
는 수심이다. 식 (17)의 관계식을 이용하여 식 (18)과 같이 파의 성질을 나 타내는 두 변수인 파고 , 주파수
를 갖고 시간 에 따른 피스톤 wall의 행정 변화를 식 (19)에 제 시하였다. 또한 선형파 가정 이론
에 의하 여 본 연구에서는 파고를
크기로 가정하여 계산에서 원하는 파를 피스톤 행정의 왕복 이동에 따라서 결정될 수 있다.
×
cos
(18)
(19)Figure 4: A rigid body has six models of motion
surge(1), sway(2), heave(3), roll(4), pitch(5), and yaw(6).또한 부유체의 운동은 6-자유도강체(6-DOF Rigid Body) 해석법을 사용하였으며, 본 연구에서 는 두 부유체에 대한 운동을 해양에서 주로 많이 발생하고 지배적인 운동방향인 heave(3)와 pitch(5) 만 고려하여 계산하였으며 Figure 4에 6-자유도운 동을 제시하였다. 부유체의 시간에 따른 거동을 나 타내기 위해 비정상상태 계산을 수행하였으며, 해 석 정밀도를 확인하기 위하여 courant [6]수를 비교 한 결과 시간 간격은 0.1초가 적합한 것으로 판단 되었으며 총 10초에 대한 부유체의 거동을 계산하 였다.
3. 결과 및 고찰
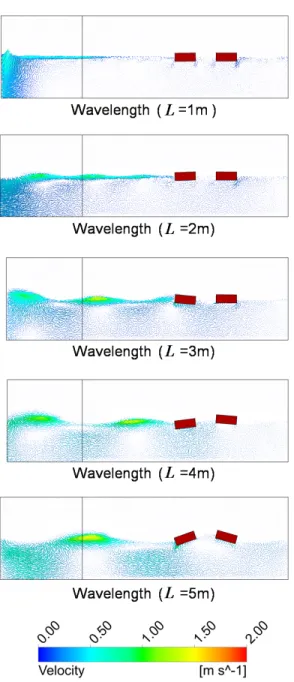
본 연구의 목적은 주기파가 생성되었을 때 부유 체 변위 및 회전 각도에 대한 고찰이므로 파장을 변수로 선택하여 파장의 변화에 따른 부유체의 변 위를 확인하였다. Figure 5는 비정상상태 계산에서 파 생성 후 9초인 시점에서 파장 크기 변화에 따 른 Z-방향의 중앙 X-Y단면에서의 속도 벡터를 비 교한 그림이다.
전체적으로 좌측 벽면 근처에서는 파가 생성되 는 구간이므로 유체의 속도가 상대적으로 다른 지 점보다 큰 것으로 나타났고 좌측 피스톤 벽면과의 거리가 멀어지면서 속도가 점차 감소되었다. 에너 지의 감쇠가 일어나는 원인은 수심이 깊지 않으므 로 바닥 경계면에서 발생하는 에크만 경계층 (Ekman layer)에 의해 전체적인 에너지의 감쇠가 진행된다고 판단된다. 또한 표면에서 파가 진행할 때 부유체를 통과하면서 발생하는 에너지 손실도
존재하는 것으로 생각된다.
이와 같은 에너지 감쇠로 인하여 파장이 가장 작은 1m인 경우 파고가 매우 낮게 생성되고 있으 며 부유체 근처에서의 속도감소가 큰 것으로 나타 났다. 파장이 커지면 그에 비례하여 파고가 높아지 며 두 부유체 간의 운동변화가 크게 발생함을 확 인할 수 있다.
Figure 5: Velocity vectors for different wavelength
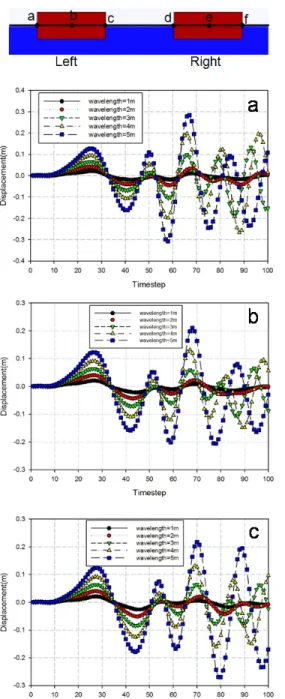
Figure 6은 두 부유체에서의 중간단면 a, b, c, d, e, f 점에서 파장이 다른 경우 시간변화에 따른 부유체의 변위를 비교한 그래프이다. 전체적으로 좌우 부유체의 같은 위치를 비교 했을 경우(즉, a 점과 d점, b점과 e점, c점과 f점) 좌측 부유체의 변 위가 우측보다 큰 것을 확인할 수 있다. 이는 앞서 설명에서 파가 좌측방향에서 생성되어 왼쪽 부유 체를 경과하여 오른쪽 부유체를 통과해서 출구쪽 으로 전달되는 과정에서 좌측 부유체가 파의 에너 지를 많이 받기 때문이며 앞서 언급한 바와 같이 바닥에서 벽면 저항에 의해 파의 에너지가 좌측부 터 우측방향으로 점차 감소되기 때문이다.
파의 에너지가 비교적 큰 왼쪽 부유체에 위치한 지점 a, b, c에서 파장이 증가함에 따라 커지는 파 고가 불규칙하게 증가하는 양상을 보이며 파의 에 너지가 상대적으로 많이 감소된 오른쪽 부유체 지 점 d, e, f에서의 파장 변화에 따른 파고의 변동은 왼쪽 부유체에 비해 규칙적인 형태를 보인다. 여기 서 진폭은 아래의 식으로 정의할 수 있다.
(20)Figure 6에서 부유체의 각 지점에서의 진폭은 파 장과 정비례 하는 것을 알 수 있으며, 또한 각 지 점에서의 최대 진폭(m)은 a, b, c, d, e, f에서 각각
m ax
, m ax
, m ax
, m ax
, m ax
, m ax
인 것으로 확인되었다.Figure 7은 파장이 4, 5 그리고 6m인 경우에 대 하여 좌우 두 부유체 사이 거리에 해당하는 c-d사 이 거리 1m에서 출발하여 시간에 따른 거리변화 를 나타낸 그림이다. 그림에서 시간이 지나면 초기 c-d의 거리는 c'-d'와 같이 변하게 되고 결과적으로 거리의 증가와 감소는 다단식 부유체 발전시스템 설계에 있어서 유압 실린더 내에 설치될 피스톤의 왕복이동행정과 관련되므로 시간에 따른 두 부유 체 사이의 거리변화 값이 발전시스템 내부 유압시 스템 설계에 적용할 수 있을 것으로 판단된다. 두 부유체 사이에서의 거리는 파장이 가장 큰 6m인 경우 가장 높은 값인 1.06m로 확인되었으며 c-d 간 의 거리는 파장이 증가함에 따라 비례적으로 증가 하지만 50초가 지나면 증가폭이 다소 불규칙하게
Figure 6: Displacement in point left and right
변동됨을 알 수 있다. 불규칙한 거동은 왼쪽 부유 체와 오른쪽 부유체가 시간이 지나면서 위상차가 커지기 때문인 것으로 생각된다.
Figure 8과 Figure 9는 각각 좌-우 부유체에 대 한 시간 경과에 따른 회전각도를 파장 크기에 따 라서 비교한 그림이다. 파가 유입되면 좌우 두 부
Figure 7: Distance change between the left floater and
the right floater for various wavelengthFigure 8: Angle
in a left floater for base line유체가 동시에 시간에 따라 각 각 b와 e를 중심으 로 회전운동을 할 것이며 좌-우 두 부유체의 파장 이 클수록 회전각도가 커지는 경향을 보였으며 파 장이 동일한 경우 좌측 부유체에서의 회전 각도가 우측보다 상대적으로 큰 것을 확인할 수 있다.
Figure 7의 설명에서 언급한 바와 같이 각 지점 에서의 변위와 Figure 8과 9에서와 같이 두 부유체
사이의 회전각도의 변화는 부유체의 시간에 따른 모든 운동에 대한 정보를 계산할 수 있으므로 부 유체 발전 시스템 내부 최적화 설계에 도움을 주 는 유용한 기초자료가 될 것이다.
Figure 9: Angle
in a left floater for base line4. 결 론
본 연구에서는 6-자유도운동해석 기법을 적용한 3차원 CFD 해석으로 두개의 부유체에 대한 거동 을 유입되는 파의 성질에 따라 해석하였다. 현재 실험에서 가장 많이 사용되는 피스톤 형식의 조파 기와 동일한 형태의 파를 생성하였으나 얕은 수심 으로 인하여 바닥면에서 생성되는 에크만 경계층 에 의해 파의 에너지가 감쇠되는 현상을 보였다.
생성된 파를 이용하여 파장에 따른 부유체의 거동 을 계산한 결과 파장이 5m인 경우 부유체의 최대 진폭은 0.3m, 파장 1m인 경우 최소 진폭은 0.15m 그리고 파장 6m인 경우 부유체간 최대 거리는 1.06m로 계산되었다.
후 기
이 논문은 2010년도 교육과학기술부의 재원으로 한국연구재단의 지원을 받아 수행된 연구임(No.
2010-0026578)
참고문헌
[1] Richard Bound, Status and Research and Development Priorities, Wave and Marine Accessed Energy, UK Dept. of Trade and
Industry(DTI), DTI Report # FES-R-132, AEAT Report # AEAT/ENV/1054, United Kingdom, 2003.
[2] Antonio F.de O.Falcao, “Wave energy utilization: A review of the technologies,”
Renewable and Sustainable Energy Reviews vol.
14, no. 3, pp. 899-918, 2010.
[3] A. Al-Habaibeh, D. Su, J. McCague and A.
Knight, “An innovative approach for energy generation from waves”, Energy Conversion and Management, vol. 51, no. 8, pp. 1664-1668, 2010.
[4] Igor Bulatov, Simon J Perry and Jiri J Klemes,
“A new emerging energy technology - Pelamis- Demonstration of the assessment by EMINENT tool”, Chemical Engineering Transactions, vol.
18, pp. 105-110, 2009.
[5] Robert G. Dean and Robert A. Dalrymple, Water Wave mechanics, for Engineers and Scientists, World Scientific, 1991.
[6] ANSYS CFX 13.0 Solver theory
저 자 소 개
Kui Ming Li(李奎明)
2003년 중국 길림대학 기계공학과 (공 학사), 2010년 한국 부경대학교 기계공 학과(공학석사), 2010-현재, 부경대학교 메카트로닉스공학과(박사과정) 관심분 야: 파력 발전, CFD모델링, MEMS.
Nanjundan Parthasarathy 1998년 인도 Bharathiar 대학(수학학사), 2000년, 동대학원 (수학과석사), 2000-2009년 동 대학 (수학강사), 2010- 현재 한국 부경대학교 메카트로닉스공 학과(박사과정), 관심분야: 파력 발전, 파력 발전 시스템 수학적 모델링
박영규(朴榮奎)
2007년 부경대학교 기계공학과(공학사), 2009-현재 부경대학교 메카트로닉스공 학과 (석사과정), 관심분야: CFD 모델 링, 응용유체역학
정호윤(鄭浩允)
2004년 부경대학교 기계공학과(공학사), 2007년 동 대학원 기계공학과(공학석 사), 2007-현재 동 대학원 기계공학과(
박사과정)
최윤환(崔允煥)
1996년 동아대학교 기계공학과(공학사), 1998년 동 대학원 기계공학과(공학석 사), 2001년 동 대학원 기계공학과(공학 박사), 현재 부경대학교 기계자동차공학 과(박사후연구원).
이연원(李蓮源)
1958년 08월생, 1981년 경북대학교 기 계공학과(공학사), 1983년 동 대학원 기계공학과(공학석사), 1993년 일본 동경대학교 대학원 기계공학과(공학 박사), 현재 부경대학교 기계자동차공 학과(교수), 한국마린엔지니어링학회 감사, 한국가시화정보학회 사업이사, 한국동력기계학회 학 술이사, 한국풍력공학회 감사.
![Figure 3: Computational domain and boundary condition 해양에서 발생하는 파를 구현하기 위하여 주로 많이 사용되는 피스톤 식 조파기의 파 생성 원리 를 적용하였으며 피스톤 행정(stroke) 변화에 따라 생성되는 파는 아래와 같은 수식으로 정의할 수 있다[5]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/4839143.282922/4.786.431.682.127.247/computational-해양에서-발생하는-구현하기-사용되는-조파기의-적용하였으며-생성되는.webp)