서론 I.
세기는 로봇의 시대라고 일컬어질 만큼 로봇 21
이 우리의 실생활에서 활발하게 활용될 것으로 예 상되고 있다. 또한 근래의 로봇 기술이 발전함에 따라 로봇은 사람들의 요구에 따라 더 이상 단순, 히 인간의 명령만을 그대로 수행하는 것이 아니라, 인간과 상호작용을 하며 감정적인 교류가 가능하도 록 발전 되어가고 있다. 이렇듯 인간과 로봇간의 정서적 교류를 통한 친화적인 상호작용에 대한 중 요성이 강조됨에 따라 주변의 상황정보에 따른 적, 절한 감정을 생성하고 표현하는 로봇에 대한 연구 가 많이 진행되어지고 있다.
은 감정 표현이 가능한 로봇인 C. Breazeal
에서 감정 생성을 위한 아키텍쳐를 제안 KISMET ,
하였다 이 아키텍쳐에서 감정은 로봇의 동기 행동. , 시스템과 연동하여 사건에 대한 로봇 자신의 반응 을 인간이 이해하는 감정 표현 수단을 통해 전달하 고 이를 통해 인간과의 사회적 관계 형성을 위한, 수단으로 삼고자 하였다 [1]. J. Bates등은 가상 환경의 캐릭터를 개발한 OZ 프로젝트에서 캐릭터 가 생명력을 가진 것처럼 보여지기 위해서는 이 캐 릭터가 감정을 표현할 수 있어야 한다고 주장하였 다. 그리고 가상 캐릭터의 지능과 감정을 총괄할 수 있는 계산 모형을 제시하였다 [2].
로봇의 생성되는 감정을 변화하고 다양화하기 위해 로봇의 성격을 구현하는 연구 또한 많이 진행 되어지고 있다 심리학에서 성격이란 한 개개인마. 다 다른 지속적인 감정 생각 그리고 행동 패턴을, , 나타내는 것이라고 정의되어진다. Donald Norman 은 성격이란 행동 신념 의도들을 밀접하게 연
[3] ,
결지어줄 수 있는 개념 모델이라고 하였으며 로봇,
성격과 친밀도를 지닌 로봇의 일반화된 상황 입력에 기반한 감정 생성
(Robot's Emotion Generation Model based on Generalized Context Input Variables with Personality and Familiarity)
권 동 수*, 박 종 찬 김 영 민 김 형 록 송현수, , ,
(Dong-Soo Kwon, Jong-Chan Park, Young-Min Kim, Hyoung-Rock Kim, Hyunsoo Song)
Abstract : For a friendly interaction between human and robot, emotional interchange has
recently been more important. So many researchers who are investigating the emotion generation model tried to naturalize the robot's emotional state and to improve the usability of the model for the designer of the robot. And also the various emotion generation of the robot is needed to increase the believability of the robot. So in this paper we used the hybrid emotion generation architecture, and defined the generalized context input of emotion generation model for the designer to easily implement it to the robot. And we developed the personality and loyalty model based on the psychology for various emotion generation. Robot's personality is implemented with the emotional stability from Big-Five, and loyalty is made of familiarity generation, expression, and learning procedure which are based on the human-human social relationship such as balance theory and social exchange theory. We verify this emotion generation model by implementing it to the 'user calling and scheduling' scenario.
로봇 감정 성격 친밀도 충성심 상황정보
Keywords : , OCC model , Big-Five, , , ,
교신저자
* (Corresponding Author)
논문접수 : 2008. 05. 02., 채택확정 : 2008. 05. 31.
권동수 : KAIST 기계공학과
박종찬 김영민 김형록 송현수, , , : KAIST 기계공학과 본 논문은 인간기능생활지원 지능로봇 사업단의
※
연구비에서 지원하여 연구하였음.
에게 성격을 부여함으로써 로봇의 개념모델과 로봇 의 행동을 사람으로 하여금 좀 더 쉽게 이해하도록 할 수 있다고 하였다. Kshirsagar [4]는 감정을 가 진 가상 인간 시스템을 ‘Multilayer Personality 을 통해 구현하였다 로봇의 다음 상태의 무
Model’ .
드를 Bayesian Belief Network을 통해 결정함에 있어서의 전이 확률을 심리학의 FFM(Five-Factor 에서의 가지 인자들을 기반으로 정의 Model) [5] 5
하였다 유찬우 등은 로봇의 감정 표현 행동을 위. 해 로봇의 감정과 성격을 통해서 결정된 동기 모델 을 이용하였다 또한 로봇에게 합당하도록. FFM을 수정하여 사용하고 사람의 반응에 따라 학습이 가, 능하도록 하였다 [6]. 와세다 대학의 Hiroyasu
는 로봇의 성격은 직접적으로 로봇의
Miwa Mental
모델의 형태를 바꾸지 않는다고 말한다. Big-Five 모델에 기반하여 로봇에게 주어지는 입력 정보가 로봇의 성격에 따라 로봇에게 다른 영향을 미쳐 동 일한 Mental 모델에서의 현재 로봇의 상태가 달라 지고 그에 따라 로봇의 감정 상태가 정해지게 된, 다 또한 정해진 감정 상태의 표현 강도를 다르게. 하여 로봇의 성격을 구현하였다 [7,8]. 인간 감정의 도메인에서 사건에 기반한 일시적인 감정뿐만 아니 라 대상에 대한 지속적인 정서 관계 좋아함 싫어함( , 등의 정서상태 가 인간의 사회적 행동 결정 메커니) 즘에 중요한 영향을 미친다고 보고되고 있다 그러므로 로봇이 상호작용하고 있는 대상 [9,10]. ,
의 정서적인 의도에 대응해 자신의 행동을 선택하 고 표현하는 것은 로봇의, Believability를 높이기 위한 중요한 연구가 된다. 로봇의 충성도에 관한 연구는 로봇이 인간과 지속적인 상호작용을 통해 관계를 형성하는 메커니즘을 사회학적 접근방법에 기반하여 구현하고자 한다 즉 대인관계의 호감도. , 형성 이론 사회균형 이론 사회교환 이론에 기반하, , 여 로봇이 사용자에 대해 친밀도를 생성 표현 학, , 습하는 일련의 과정을 모델링하고 이를 기반으로, 로봇이 특정 사용자에게 충성도를 갖게 하는 메커 니즘을 제안하고자 한다.
이렇듯 인간과 로봇의 감정 상호작용 기술은, 심리학 사회학적 연구에 기반한 로봇의 기본적인/ 감정 생성 모델 개발이 검증 단계를 거치면서 이, 제 보다 세련된 감정 상호작용을 위한 사용자에 대 한 충성도 구현 개성 표현 및 일반화된 상황입력, 변수들의 정의를 통한 실용적인 감정 생성 모델 연 구에 대한 필요성이 대두되고 있다.
이에 본 논문에서는, 성격과 친밀도를 로봇에 구현하고 로봇의 감정 생성을 위한 일반화된 상황,
입력 변수들을 정의하여 로봇의 감정 생성 모델을, 사용자가 로봇을 호출하고 로봇이 사용자에게 다가 가 일정관리를 진행하는 시나리오에 적용 하였다.
로봇의 감정 생성 시스템 .
Ⅱ
로봇에서 구현하고자 하는 감정이라는 현상을 관찰하고 분석할 수 있는 대상은 인간이다 로봇에. 서 감정을 구현하려는 목적은 인간이 사용하는 상 호작용 수단으로서의 감정을 로봇도 이해하고 활용 할 수 있도록 하여 인간과 로봇의 상호작용의 효율 성과 자연스러움을 증진시키고 로봇이 인간과 사, 회적 관계를 형성할 수 있는 개체로서 발전시키기 위함이다 따라서 인간의 감정이 어떠한 과정을 통. 해 발현되고 표현되며 상호작용에 이용되는지에 대 한 연구는 로봇의 감정 시스템을 설계하는데 있어 중요한 참고 사항이자 로봇 감정 생성 기능의 목표 가 된다.
그림 1. 감정 생성 시스템 아키텍쳐 Fig. 1. Architecture of the emotion generation
system
인간의 감정 시스템은 서로 다른 특성을 가진 층위(Layer)들로 구성되어 있고 각 층위에서는 외, 부의 자극이나 내부의 동기 상태에 대해 적합한 감 정 상태를 생성하고 이를 외부로 표출하거나 내부, 의 생리적 변화를 만들어 내게 된다 [11,12]. 이렇 게 서로 다른 층위의 존재는 인간에게서 감정이 다 양한 형태로 발현되는 현상을 통해 추측할 수 있 다 즉 개체의 생존에 위협이 될 수 있는 자극에. , 대해서는 이러한 자극이 나타내는 대표적 특성들에 대해 즉각적으로 공포 반응을 나타내게 되고 이는, 개체의 모든 자원을 이 자극에 대해 집중하여 이 문제를 해결하는데 몰두하게 한다 그러나 다른 많. 으 감정 반응들은 외부의 사건에 대한 호 불호 예/ , 측 결과의 확실성, 사건의 주체등에 대한 인지적
평가 (appraisal)결과에 따라 감정 반응을 생성하게 된다 따라서 인간에게서 나타나는 감정 현상의 특. 징은 정보 처리 과정에 따라 서로 다른 특징들을 나타내며 본 연구에서 제안하는 로봇의 감정 생성, 시스템도 서로 다른 특징을 가진 층위로 구성된 하 이브리드 시스템으로 구성하였다.
그림 1은 로봇의 감정 생성 시스템의 아키텍쳐 를 보여준다 가장 아래의 리액티브 감정 생성 시. 스템은 외부의 자극에 대해 미리 정의된 자극의 특 성들 예를 들어 소리의 크기 충돌 신호등의 저단, , 위의 센서 신호에 대해 공포 분노등의 감정을 생, 성한다 리액티브 생성 시스템을 제외한 다른 계산. 모형들은 딜리버러티브 (delieberative) 감정 생성 시스템을 구성한다 이 층위에서는 감정생성의 인. 지적 평가 이론 (cognitive appraisal theory)에 근 거하여 외부의 사건 (event), 사건의 주체 (agent), 감정 생성 대상 (object)에 대해 적합성
전망 호 불호
(desirability), (prospect), / (appea 의 파라미터를 기준으로 평가를 수행한 -lingness)
다 상황 인식 모듈. (context awareness module) 에서는 이러한 파라미터들에 대해 외부의 사건이 어떠한 값을 가지고 연결이 되는지 결정한다 감정. 생성 모듈 (emotion generation module)에서는 이 파라미터 값에 따라 해당하는 감정 상태를 결정하 고 이는 행동 표현 모듈 (action coloring module) 을 통해 로봇이 사용가능한 감정 표현 방식 (얼굴 표정/LED/음향/TTS)을 조합하여 외부로 표현하게 된다 이와 더불어 충성심 모듈. (loyalty module)은 로봇과 사용자의 친밀도에 따라 표현하게 되는 감 정의 종류와 강도에 변화를 주며, 개성 모듈 은 로봇의 성격에 따라 감정 (personality module)
표현의 강도를 변화시킨다.
이렇게 외부 사건을 평가하여 감정 상태를 결정 하는 데는 로봇이 현재 처한 상황에 대한 총체적인 정보가 필요하므로, 로봇을 전반적으로 제어하고 계획을 수립 수행하는 지능 시스템과의 정보 교환/ 이 필요하다 제안된 감정 생성 시스템에서는 태스. 크 매니저 (TM) 모듈이 이러한 역할을 담당하게 된다.
리액티브 감정 생성 모듈은 자극의 특징에 대한 즉각적 감정 반응을 생성한다 자극의 특징은 개별. 자극 마다 각각 정의할 수도 있지만 이렇게 되면, 새로운 자극이 추가될 때마다 자극의 특징에 대한 분석과 특징 추출 작업을 수행하여야 한다 따라서.
본 연구에서 제안하는 리액티브 감정 생성 모듈에 서는 리액티브 감정 생성을 위한 자극의 특징으로 자극의 색다름 (unexpectedness)과 자극에 대한 호 불호/ (valence)를 제안하였다 그리고 로봇의 현. 재 주의 상태 (attention)를 고려하여 서로 다른 감 정을 생성하도록 하였다.
표 1. 리액티브 감정 생성 규칙 Table 1. Reactive emotion generation rule
주의 상태 자극의
색다름 호 불호/ 감정 반응 주의 집중 예상 범위 좋아함 기쁨 주의 집중 에상 범위 싫어함 불쾌 주의 집중 예상 위배 좋아함 기쁨 주의 집중 예상 위배 싫어함 분노 주의 집중 않음 예상 위배 좋아함 기쁨 주의 집중 않음 예상 위배 싫어함 공포
표 1은 리액티브 감정 생성 시스템에서 각 특징 변수의 값에 따라 정의된 감정 상태를 보여준다.
따라서 주어진 자극이 얼마나 기존의 자극에 비해 색다른지 그리고 이 자극에 대해 정의된 호 불호에, / 따라 로봇의 기쁨 불쾌 분노 공포의 반응을 즉각, , , 적으로 나타내게 된다.
표 2. 상황 정보를 나타내는 파라미터 Table 2. The parameter for information of
situations 상황 정보 파라미터 Event, Agent, Object Desirability of Agent Desirability of Object Prospect Relevance
Praiseworthiness Appealingness Unexpectedness
딜리버러티브 감정 생성을 위해서는 감정을 일 으키는 외부 사건의 상황에 대한 판단이 필요하다.
제안된 감정 생성 시스템의 딜리버러티브 감정 생 성 모듈들은 Ortony, Clore, Collins가 제안한 감정 생성의 인지 모델에 근거하고 있다 [13]. 이 인지 모델에서 정의된 평가 파라미터들은 인간의 감정 생성 시스템에서 정의된 것들이므로 실제 로봇에,
게 감정 생성을 위한 입력으로 정의해주기는 어려 운 면이 있다 따라서 제안된 감정 생성 시스템은. 모델의 상황 정보 파라미터 중 로봇에 적용 가 OCC
능한 파라미터들로 구성된다 표. 2.는 상황 정보 해 석을 위한 파라미터들이다.
표 2의 파라미터들의 의미는 다음과 같다. 는 현재 로봇에게 감정을 생성시키는 사건을 Event
나타내고, Agent는 이 사건을 발생시키는 행위의 주체를 나타내며, Object는 발생된 사건에서의 객 체를 의미한다. Desirability of Agent는 발생한 사 건이 로봇에게 긍적적 부정적인지를 의미하고 사건/ , 이 로봇의 동기나 목적을 만족하는 경우 긍정적 사 건이며 그렇지 않은 경우는 부정적 사건이 된다, . 는 발생한 사건이 로봇 이외 Desirability of Object
의 대상 사람 에게 긍정적 부정적인지를 의미한다( ) / . 즉 사건에 대한 호 불호를 로봇이 아닌 다른 개체/ 의 입장에서 판단한 것이다. Prospect Relevance 는 현재 일어난 사건이 최종적인 로봇의 목표를 수 행하는데 영향을 주는지 즉 미래의 사건과 관련이, 있는 것인지 없는지를 판단하게 해준다.
는 현재 로봇의 행동이 칭찬 받 Praiseworthiness
을만한지 아닌지를 나타내는 파라미터이다.
는 현재의 사건에 속한 대상에 대한 Appealingness
선호를 의미한다 외부에서 로봇에게 주어지는 입. 력의 분석을 통한 위의 여러 가지 파라미터들에 대 한 평가 결과에 따라 딜리버러티브 감정 생성 시, 스템에서는 기쁨 우울 기대 걱정 자신감 부끄러, , , , , 움 축하 위로 좋아함 싫어함 당황의 감정을 생, , , , , 성하게 된다.
감정 생성을 위한 상황입력 .
Ⅲ
앞에서 설명한 바와 같이 딜리버러티브한 감정 을 생성하기 위해서 사용된 OCC 모델에서의 파라 미터는 실제 로봇의 디자이너가 판단하고 직접 값 을 넣어주는데 불편함이 따른다 로봇에게 일어나. 는 모든 상황에 대해 앞서 설명한 파라미터들에 대 한 정의를 하는 것이 쉽지 않기 때문이다 따라서. 본 논문에서는 각 상황에 대한 정보를 판단하기 위 해 일반화된 상황입력을 정의하였다.
상황에 대한 정보를 상황 인식 모듈에서 뽑아내 기 위해서는 로봇에게 발생하는 사건으로부터 주어 지는 입력에 대한 정의를 해야 한다.
상황 인식 모듈에서 판단된 상황에 대한 정보를
뽑아내기 위한 일반화된 상황입력을 표 3.과 같이 정의하였다 우선 로봇에게 발생 가능한 사건이 어. 떤 것들이 있는지 그리고 각 상황에서 로봇이 지, 니고 있는 Goal은 무엇인지에 대한 정의가 필요하 다. 그리고 현재 사건의 주체와 객체가 누구인지 정해야 한다.
표 3. 상황 정보 판단을 위한 상황 입력 Table 3. Input of the situation for Context
Awareness
Variables Definition Values Goal Agent and object
goals -
Agent Subject of the event - Object Object of the event -
IsObjectLike Robot's loyalty value to the object
Loyalty value : -1 ~ 1 Event Event that can be
occurred to the robot - Evaluation
Index
Effect of the event for achieving the goal
-1, 0, 1
IsGoalAchieved
Does the robot achieve the goal or not
TRUE, FALSE
IsPlanExecuted
Does the robot is executing the planned action or not
-1, 0, 1
Prospect Relevance
Is the event related to the result of the t a s k . ( P r o s p e c t relevant or not)
TRUE, FALSE
IsExpected Is the current event expected or not
TRUE, FALSE
에 대한 로봇의 충성심에 대한 값들로 Object
를 나타내고 에 대한 로봇의 성 IsObjectLike , Goal
취 여부로 Evaluation Index의 값을 정한다 예를. 들면 로봇이 최단거리로 목표지점에 도착하는 것, 이 로봇이 가지고 있는 Goal일 때 주행을 하는 도, 중에 충돌로 인해 최단거리로 가지 못하고 먼 거리 로 돌아가게 되면 Evaluation Index의 값은 ‘-1’이 되는 것이다 로봇에게 주어진 일에 대한 수행 완. ( 료 의 여부에 따라) IsGoalAchieved의 값을 정하고, 로봇이 주어진 일을 수행하기 위해 취하는 행동들 이 계획된대로 잘 진행되는지의 여부에 따라 에 대한 값을 정한다 예를 들면
IsPlanExecuted . ,
로봇이 주행을 할 때에 계획된 경로를 잘 따라가게 되면 IsPlanExecuted는 ‘1’이라는 값을 가지게 된 다. Prospect Relevance는 로봇에게 주어진 일과 관련하여 현재의 사건이 영향을 주는지에 대한 여 부를 가지고 판단한다 예를 들어 사용자가 로봇을. 호출했을 경우 이 호출에 대한 사건은 로봇이 목, 표지점에 도달해야하는 일에 대해 영향을 주기 때 문에 'TRUE'라는 값을 가지게 된다. IsExpected는 로봇이 예상하는 사건의 순서가 있을 때 현재의 사 건과 로봇이 예상하는 것과의 일치 여부를 나타낸 다. 위의 상황입력들을 종합하여 한 사건에 대한 예를 들어보면 다음과 같다 사용자가 로봇을 호출. 하였을 때 로봇이 최단거리의 경로를 따라가고 있, 으며 Goal에 가까워지고 있는 상황에 대한 입력은 로봇이 사용자에게 최단 거리로 다가가는 {Goal :
것, Agent : 로봇, Event : 로봇이 목표지점으로 이동함, Evaluation Index=1, IsGoalAchieved : FALSE, IsPlanExecuted : TRUE, Prospect 가 된 Relevance : FALSE, IsExpected : TRUE}
다 이러한 상황입력에 대해 로봇은 기쁨 또는 자. 신감의 감정을 생성하게 된다.
사람이 사건에 따라 생성되는 감정의 강도가 다 르듯이 로봇 또한 각 사건에 대해 생성되는 감정의 강도가 달라야 한다 앞서 정의한 일반화된 상황입. 력 정보 기반으로는 생성되는 감정의 강도를 정해 주지는 못한다 이에 본 논문에서는. OCC모델의 강 도변수 중 생성되는 감정에 전체적인 영향을 주는 전역 강도변수인 Sense of reality (sense of
를 이용하였다 는 현재의
reality) . Sense of reality
사건이 실제로 일어날 만한 일인지에 대한 평가 요 인이 된다. Sense of reality에 비례하여 생성되는 감정의 강도가 변화하게 되는 것이다. Sense of 는 사건이 발생할 때 사건마다의 판단 기준 reality
을 가지고 정의해야 한다 예를 들어 로봇이 이동. , 중에 다른 사용자를 만나게 되어 그 사용자 에 대한 감정을 생성하게 되면 로봇과 사
(object) ,
용자와의 거리를 Sense of reality 값으로 정의할 수 있다.
로봇의 성격 구현을 통한 감정 상태의 .
Ⅳ
변화
심리학에서 성격 (personality)이란 개인이 환경
에 따라 반응하는 특징적인 양식으로서 타인과 구 별되게 하는 독특하고 일관성 있는 사고 감정 행, , 동방식의 총체라고 한다 그것은 개인이 다른 사람. 과 상호작용하는 일반적인 양상, 즉 어떤 개인이 내향적인지, 외향적인지, 흥분을 잘하는지 차분한 지 관대한지 엄격한지 등을 말한다, .
로봇에 성격을 부여하여 자연스러운 행동을 발 현을 하기 위해서는 성격 모델링의 심리학적인 접, 근이 필요하다 심리학에서 성격을 나타내주기 위. 한 모델로 Eysenck(1991)의 PEN model (psychoticism, extroversion, neuroticism), E-IN model (extroversion, introversion, neuroticism) 등이 있으나, 이러한 모델의 기반이 되는 중요한 것으로 ‘Five Factor Model’[5]이 있다 이러한 모. 델은 심리학자들이 인간의 행동과 감정을 이해하기 위해서 제안되었다. Five Factor는 성격을 나타내 주기 위한 5가지 기본적인 차원으로 ‘Big-Five'
라고 불리우기도 하며 표 와 같다
[14] , 4 [4].
표 4. Five Factor : 성격의 기본적인 차원 Table 4. Five Factor : Dimensions of the
personaltiy space
Factors Description Illustrative adjectives
Conscient iousness
O r g a n i z e d , persistent in achieving goals
Well organized, hardworking,
planful, methodical
Extravers ion
Preference for and behavior in social situations
Extroverted, talkative, assertive, energetic, social Agreeable
ness
Interaction with others
Trusting, friendly, cooperative Emotional
stability
Tendency to be calm, and not nervous
Calm, relaxed, stable
Openness
O p e n
m i n d e d - n e s s interest in culture
Imaginative, creative, explorative
성격을 나타내주는 다섯가지의 대표 기질 중에 정서안정성이라는 요소는 사람의 감정 기복이 얼마
나 심한지를 나타내는 척도이다 본 논문에서는 로. 봇의 정서안정성에 따른 감정의 강도 변화를 위해 두 가지의 방법을 제안하였다 첫째 생성되는 감정. , 의 강도를 조절하는 요소로 이용하였다 현재 생성. 되는 감정의 세기는 이미 로봇이 내부적으로 지니 고 있는 무드에 영향을 받게 된다 이러한 무드를. 본 논문에서는 식 (1)에서와 같이 이전에 가지고 있는 감정들의 긍정적인 감정들과 부정적인 감정들 의 합을 이용하여 로봇의 감정 상태를 변화하였다.
둘째 로봇이 지니고 있는 과거의 감정 상태가 현, 재 생성되는 로봇의 감정에 영향을 주듯이 현재 생 성된 감정 또한 로봇의 감정 상태 변화에 영향을 주게 된다 식. (2)에서와 현재 생성된 감정의 긍정/ 부정 여부에 따라 다른 감정들의 세기를 조절하였 다.
위의 감정 생성 모델 관계식에서 에 비례,
에 반비례하여 로봇의 정서안정성에 변화가 생기 고, 정서 안정성이 높은 로봇일수록 로봇의 감정 상태의 변화기복이 적어지게 되며 이를 통해 로봇, 의 정서안정성에 따른 성격을 구현하여 로봇의 감 정 상태를 결정 하였다.
그림 2. 로봇의 감정 상태 갱신 Fig. 2. Updating the robot's emotional state
로봇의 감정은 현재 사건에 대한 로봇의 감정 생성만으로 결정되어지지 않는다 즉 로봇의 과거. , 의 감정 상태와 무드를 포함하여 현재 로봇의 감정 을 결정하게 된다 로봇의 감정 생성 시 사건간의. , 연관관계를 고려한다면 로봇의 생성된 감정이 더욱
자연스러워질 것이다 이러한 사건간의 연관관계가. 매 사건에 따라 생성된 감정에 포함되어 있다는 가 정 하에 본 논문에서는 각 사건에서 발생한 감정, 상태를 적층하는 방법을 통해 로봇의 감정 상태를 갱신하였다 이러한 알고리즘을 통해 식. , (1), (2)에 기반하여 그림 2와 같이 로봇의 이전 감정 상태와, 현재 생성된 감정 감정의 선형적 감소 생성된 감, , 정에 따른 다른 감정들의 감소를 고려하여 로봇의 현재 감정 상태를 갱신하였다.
갱신된 로봇의 감정 상태를 표현해 주기 위해 기존의 로봇들은 여러 감정 중에 최대값을 가지는 감정을 표현하였다 본 논문에서는 현재 로봇이 주. 의집중을 하고 있는 사건에 대한 로봇의 감정을 우 선적으로 표현하였다. 여기서 로봇이 주의집중을 어느 사건에 하고 있는지는 앞서 설명한 Sense of
값을 이용하였다 발생한 사건에 대해
reality . Sense
값이 생기면 이 값은 시간이 지남에 따 of reality ,
라 감소하게 되고 결국 각 사건에 대한, Sense of 값 중 최대값을 지니는 사건에 대한 감정을 reality
표현하도록 하였다.
로봇의 충성도 형성 메카니즘 .
Ⅴ
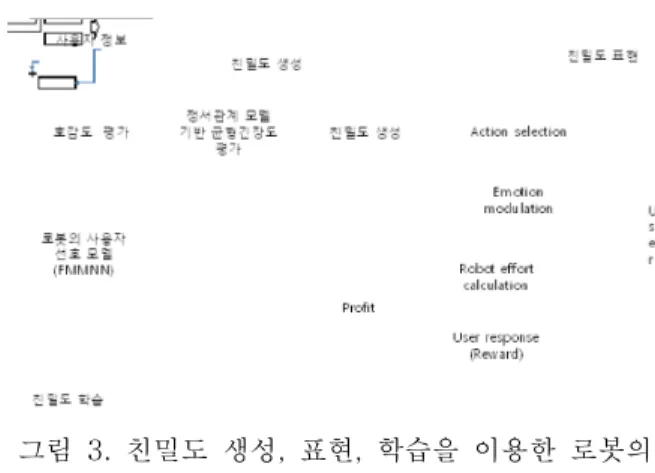
본 논문에서 제안하는 충성도 형성 메커니즘은 그림 3과 같이 친밀도 생성 표현 학습의 세 단계, , 를 통해 개발된다 즉 등록된 사용자에 대한 개인. , 적 사회적 정서관계를 통해 친밀도를 생성하는 부, 분과 생성된 친밀도를 상동 행동 및 감정표현을 이 용해 구현하는 부분 그리고 로봇의 행동에 따른, , 사용자의 반응을 이용해 지속적인 상호작용을 통해 점증적으로 친밀도를 학습하는 부분이다.
호감도 평가
정서관계 모델 기반 균형긴장도
평가
친밀도 생성 Action selection
Emotion modulation
User response (Reward) Robot effort
calculation 로봇의 사용자
선호 모델 (FMMNN) 사용자 정보
U s e r Profit
친밀도 생성 친밀도 표현
친밀도 학습
그림 3. 친밀도 생성 표현 학습을 이용한 로봇의, , 충성도 형성 프레임웍
Fig. 3. A robot's loyalty formation framework using familiarity generation, expression, and
learning
먼저 인간의 호감도 생성 요인들을 입력 특징, 으로 사용하여 로봇 사용자간의 개인적 호감도를- 생성하는 계산 FMMNN 기반의 모델을 제안한다. 인간의 호감도 생성의 주요 요인은 근접성
사회적 지위 태도의 유사성
(proximity), (control),
신체적 매력 단순노출
(attitude), (attraction),
등이 있다 이같은 퍼지 기반의 (mere exposure) .
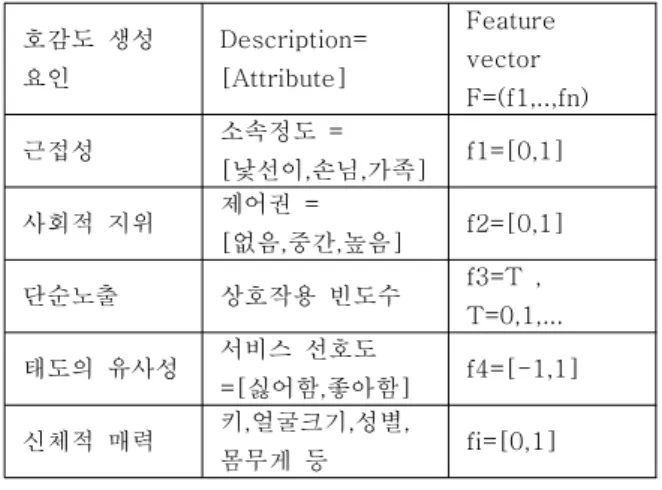
언어적 요소들을 다음 표 5.와 같이 로봇이 이해할 수 있는 특징 벡터로 치환한다.
표 5. 호감도의 사회학적 요인에 기반한 특징벡터 추출
Table 5. Feature vector extraction based on the social factors for good-feeling
호감도 생성 요인
Description=
[Attribute]
Feature vector F=(f1,..,fn)
근접성 소속정도 =
낯선이 손님 가족
[ , , ] f1=[0,1]
사회적 지위 제어권 =
없음 중간 높음
[ , , ] f2=[0,1]
단순노출 상호작용 빈도수 f3=T ,
T=0,1,...
태도의 유사성 서비스 선호도 싫어함 좋아함
=[ , ] f4=[-1,1]
신체적 매력 키 얼굴크기 성별, , ,
몸무게 등 fi=[0,1]
Liking class 1
Disliking class 1
f1 f2
f1 소속값
f1 1
-1 1
1 Liking class 2
그림 4. 로봇의 사용자 선호모델에 대한 2D 특징 공간 안에서의 표현
Fig. 4. A robot's preferred user model in 2D feature space
제안된 모델의 출력은 호감도에 대한 두 가지 클래스로 정의되고 각 클래스에 대한 퍼지소속정도 를 통해 사용자에 대한 호감도를 계산하고 그림 4 와 같이 표현 가능하다 즉 긍정적인 호감도를 나. , 타내는 liking class (c1)와 부정적인 호감도를 나 타내는 disliking class (c2)에 대한 소속값을 계산 하여 식 (3)을 통해 호감도 ( )를 계산한다.
1 2
max{max( c), max( c )}
ri s s k k
m m m
Þ =
(3) 둘째 개인적 호감도와 더불어 로봇 사용자간의, - 사회적 정서관계를 통한 긴장도 평가를 통해 친밀 도를 생성하고자 한다. Heider에 의해 제안된 사회 균형 이론 [9]은 정서 네트웍 관계를 통해 개인의 사회 속에서의 정서적 불안정성을 계산할 수 있고, 개인 (focal individual)은 불안정성을 해소하는 방 향으로 행동을 결정하고자 한다고 보고한다 이 이. 론은 김 [15]에 의해 제안된 정서관계 계산모델로 표현될 수 있고 사용자의 사회적 관계의 안정성을, 아래 식 (4)로 계산할 수 있다.
( )
1( ) 1( , )
2
{ ( ) ( , )}
( 1) , ,
1, sgn( ) 0 ( ) 0,
1, ( ) 1& sgn 0 ( , )
0,
n n
Dyad Triad
i k r j i r i
ri
ri ir
Dyad
Dyad ri ij jr
Triad
G i G i j
B n
where
if m m G i
otherwise
if G i m m m
G i j
otherwise
= ¹ = ¹
+
Þ =
-
+ ´ >
= íì î
ì+ = + ´ ´ >
= íï ïî
å å
(4)
( )
1( ) 1( , )
2
{ ( ) ( , )}
( 1) , ,
1, sgn( ) 0 ( ) 0,
1, ( ) 1& sgn 0 ( , )
0,
n n
Dyad Triad
i k r j i r i
ri
ri ir
Dyad
Dyad ri ij jr
Triad
G i G i j
B n
where
if m m G i
otherwise
if G i m m m
G i j
otherwise
= ¹ = ¹
+
Þ =
-
+ ´ >
= íì î
ì+ = + ´ ´ >
= íï ïî
å å
- n : 상호작용하고 있는 개체의 총 수 로봇. +(n-1)명 의 사용자
- : a가 느끼는 b에 대한 호감도, [-1,+1] - 싫 어함:-1, 좋아함:+1
-
: 로봇과 사용자(i) 사이의 정서관계의균형 인덱스. +1이면 균형상태이고 0이면 불균형상태 -
: 로봇과 사용자 i, j 사이의 정서관계의 균형 인덱스. +1이면 균형상태이고 0이면 불균형상 태
-
: 전체 관계노드 수에 대한 균형관계의 노드수. 즉, 1에 가까우면 로봇과 사용자 사이의 사회적 정서관계i 가 균형을 잘 이루었다고 판단지금까지 제안한 두 가지 사회학적 요인 개인적( 호감도 사회적 균형정도 의 다음의 가중 선형 결합, ) 식 (5)에 의해 친밀도(
)로 계산되어진다. (: 가중치)
{
term measuring intimacy term measuring tension of interpersonal of relationship relationship in social group
( , )
(1 )
i ri ri
ri ri
L f m B
m B
l l
=
= × + -
1424 3
(5)
로봇의 친밀도 표현 및 학습은 사회 교환 이론 에 기반한 이익 계산 모델에 의해 개발된다 기존. 의 로봇 행동 결정은 주로 reward기반의 강화학습 방법론이 지배적이다 본 연구는 친밀도에 따른 로. 봇 행동 표현의 능동성을 부여하기 위하여 reward 이외에 로봇 행동에 대한 effort를 고려하는 학습 알고리즘을 제안하였다 사회 교환 이론은 인간의. 행동결정 원리에 있어서 주어진 상황에 대한 profit 을 아래 식 (6)을 계산하여 결정되어진다고 강조하 고 있다.
p= -r c (6)
p : profit, r : immediate reward, c : robot efforts
Class2_1
Class1_1
Class1_2 Class2_2
f1
f2
f(k-1) f(k)
그림 5. 점증적 학습 룰에 의한 2D 특징 공간상에서의 특징 벡터 갱신
Fig. 5. A feature vector update by incremental learning rule in 2D feature space
로봇의 친밀도 학습은 인간과 로봇의 지속적인 상호작용을 통해 얻어지는 p의 시간에 따른 변화에 따라 점증적으로 학습되어진다 학습 룰은 그림. 5.
와 같이 친밀도를 생성하기 위한 로봇의 선호 사용 자 모델 공간내의 사용자 특징점의 위치 갱신을 통 해 이루어진다 즉. , FMMNN으로 구성된 하이퍼 공 간상에서 positive p값에 대해 c1클래스의 가장 가 까운 하이퍼박스 방향으로 현재 특징벡터가 이동하 도록 갱신되고, negative p값에 대해서는 c2클래스 의 가장 가까운 하이퍼박스 방향으로 이동하도록 갱신된다 갱신식은 식. (7)처럼 주어진다.
_
1 2
_
( ) ( 1) { ( 1)}
: Feature vector( ) 1 ,
1 | | : positive profit steps : negative profit steps
| | , ( ) 0
, arg min | ( 1) | ,
wher
J I
p n
p n
p n
J i i
f k f k W C f k
f F F
T T T
T k T T W r e
p if r e
J I C F k
n otherwise
a
a
¬ - + - -
- - =
+ - -
- - = + - = -
- >
- =ìí = - -
î
:Power, :Unity
_
e, :rewards, :action efforts,
: center position vector of i-th hyperbox of j-class
j i
r e
C
(7)
_
1 2
_
( ) ( 1) { ( 1)}
: Feature vector( ) 1 ,
1 | | : positive profit steps : negative profit steps
| | , ( ) 0
, arg min | ( 1) | ,
wher
J I
p n
p n
p n
J i i
f k f k W C f k
f F F
T T T
T k T T W r e
p if r e
J I C F k
n otherwise
a
a
¬ - + - -
- - =
+ - -
- - = + - = -
- >
- =ìí = - -
î
:Power, :Unity
_
e, :rewards, :action efforts,
: center position vector of i-th hyperbox of j-class
j i
r e
C
_
1 2
_
( ) ( 1) { ( 1)}
: Feature vector( ) 1 ,
1 | | : positive profit steps : negative profit steps
| | , ( ) 0
, arg min | ( 1) | ,
wher
J I
p n
p n
p n
J i i
f k f k W C f k
f F F
T T T
T k T T W r e
p if r e
J I C F k
n otherwise
a
a
¬ - + - -
- - =
+ - -
- - = + - = -
- >
- =ìí = - -
î
:Power, :Unity
_
e, :rewards, :action efforts,
: center position vector of i-th hyperbox of j-class
j i
r e
C
그림 6은 개발된 학습 알고리즘에 의한 로봇 친 밀도 학습 결과를 step size ()에 따라 보여주고 있다 인간 로봇 상호작용의 특성상 지속적인 상호. - 작용의 consistency를 고려하여 로봇 충성도의 수 준이 결정되어야 하고 제안된, 는 profit의 일관 성을 평가하여 로봇의 학습 수준을 결정함으로서 유연한 학습 능력을 보여주고 있다.
-1.5 -1 -0.5 0 0.5 1 1.5
1 6 11 16 21 26 31 36 41 46 51 56
step_size=1/(1+k) step_size = 1/(1+|Tp-Tn|) step_size=Constant profit
그림 6. step size에 따른 친밀도 학습 결과 Fig. 6. Familiarity learning results by each
different step-size
로봇의 감정 생성 결과 .
Ⅵ
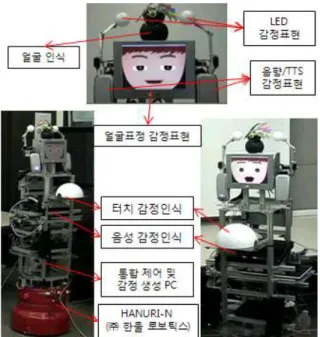
본 논문에서는 앞서 설명한 충성심 성격을 포, 함한 로봇의 감정 생성 모델을 사용자의 호출 일, 정관리 시나리오에 적용하였다 이러한 인간 로봇. 감정 상호작용 시나리오 구현을 위해서 그림 7.과 같은 로봇 플랫폼을 이용하였다. (주 한울 로보틱스) 의 HANURI-N 모바일 로봇 베이스에, KAIST 유 창동 교수팀의 음성 감정인식, KAIST 권동수 교수 팀의 터치 감정인식을 이용해 사용자의 감정 인식 을 하였고, KAIST 정명진 교수팀의 얼굴 표정
감정 표현 박종철 교수팀의 감
/LED , KAIST TTS
정 표현, JS음악심리연구소의 지은숙 소장의 음향
감정 표현의 멀티모달리티 통합을 이용해 로봇의 감정 표현을 하였다. 이러한 감정 상호작용 로봇 플랫폼을 통해 사용자의 감정을 인식하고 로봇의 감정을 생성하여 표현하는 인간과 로봇의 감정 상 호작용을 구현하였다.
그림 7. 인간 로봇 감정 상호작용 테스트 플랫폼 Fig. 7. Human-robot emotional interaction test
platform
인간과 로봇의 감정 상호작용 시나리오에 로봇 의 감정 생성 모델을 적용하기 위해서 표 6.과 같 이 Goal, Event, Agent, Object에 관한 상황정보 입력을 정하였다 로봇 호출 및 일정관리 상황에서. 로봇에 발생하는 감정은 그림 8과 같다.
그림 8. 사용자 호출 및 일정관리 시나리오에서의
로봇의 감정 상태 변화
Fig. 8. Variation of robot's emotional state in the 'user calling, and scheduling' scenario
그림 8에서 알 수 있듯이 로봇이 사용자가 호, 출을 하고 사용자에게 다가가 일정관리를 하는 것 외에 다른 사용자 주변을 지나가거나 사용자가 감, 정적인 반응을 로봇에게 보일 경우 등의 사용자와 의 상호작용 시에도 로봇의 감정 상태가 변함을 알 수 있다.
표 6. 시나리오 도메인 내에서의 상황정보 입력 Table 6. Information of situation in the domain
of the scenario Variables Description
Goal
: 사용자가 로봇을 호출하여 목표지점에 갈 때 최단거리로 가기
: 사용자의 일정을 알려주기
: 사용자로부터 좋은 반응(Response)을 받기 터치 음성( /
감정인식) Agent : 로봇
Object : user1, : user2, : user3,
: user4 ⋯
Event
: 사용자가 로봇을 호출함
: 로봇이 목표지점으로 이동함
: 로봇이 사람 주변을 지나다
: 사용자가 로봇에게 감정 반응을 하다.
: 로봇이 사용자에게 일정을 설명 한다.
⋯
결 론 .
Ⅶ
앞으로 로봇의 감정을 구현하는 기술은 여러 로 봇 개발 업체에서 수요가 지속적으로 증가할 것이 다 본 논문에서는 이러한 로봇에 감정 생성 모델. 을 적용하기 위한 일반화된 상황입력 변수들을 정 의하였고 차별화된 서비스가 가능하도록 충성심을 구현하고 동일한 상황에 대해 로봇의 다양한 감정, 을 생성하기 위해 로봇의 성격을 구현하였다.
로봇의 감정 생성 아키텍쳐는 로봇에게 주어지
는 자극에 즉각 반응하는 리엑티브 감정 생성과 주 어진 상황을 인지하여 반응하는 딜리버러티브 감정 생성이 이루어지는 하이브리드 형태에 기반하였고, 로봇에게 형성되는 사람에 대한 충성도는 친밀도 생성 표현 학습의 세 단계에 과정을 가지며 사회, , , 적 정서관계 사회교환이론에 기반하여 개발하였다, . 로봇의 성격을 구현하기 위해 심리학의 Big-Five 모델 중 정서안정성이라는 요소를 적용하여 로봇의 감정 상태 변화를 주고 로봇의 성격에 따라 로봇, 의 감정 상태에 영향을 주도록 하였다.
사람의 감정은 본 논문에서 구현된 감정들보다 종류가 여러 가지가 있다 이러한 감정들을 로봇에. 게 나타나도록 하기 위해서는 상황정보에 대한 입, 력을 좀 더 확장하여 일반화된 정의를 해주어야 한 다 또한 로봇에게 주어지는 여러 가지 상황을 하. 나하나 정의하지 않고 로봇의 감정을 생성할 수 있 는 확장성 있는 모델의 개발 또한 필요하다 로봇. 의 성격을 나타내주는 요소는 로봇의 인지, 감정 결정, 표현 등에도 다양하게 영향을 주기 때문에 여러 곳에 영향을 주는 로봇의 성격 요소들을 정확 히 분류하고 로봇에 적용 가능하도록 하는 연구가 추가적으로 이루어져야 할 것이다 이러한 로봇의. 충성도와 성격의 구현 및 감정 생성 모델의 지속적 인 연구를 통해 believable한 로봇의 개발이 가능 할 것이다.
Acknowledgement
이 논문은 21세기 프론티어 R&D 사업 중 하나 인 지능로봇 사업단의 후원으로 작성되었다 로봇. 의 개발을 위해 도움을 주신 KAIST 정명진 교수 님 박종철 교수님 유창동 교수님, , , JS음악심리연구 소의 지은숙 소장님 모두에게 감사의 말씀을 전합 니다.
참고문헌
저 자 소 개
권 동 수
년 생산
1982 KAIST 공학 석사.
년
1991 Georgia Insti- tute of Technology 로보틱스 박사.
1991~1995 Oak Ridge 국립연구소 선임연구원.
기계공학과 조교수 1995~2006 KAIST , 부교수.
현재 기계공학과 교수 인간
2006~ , KAIST ,
로봇상호작용연구센터장.
관심분야 : Human-Robot Interaction, Telerobotics, Medical Robotics, Haptics.
Email : [email protected]
박 종 찬
년 기계
2004 KAIST 공학과 학사.
년 현재
2004 ~ , KAIST 석박사 통합과정.
관심분야 : Human-robot interaction, Robot's emotion generation and personality.
Email : [email protected]
김 영 민
년 연세대학교 기계 1999
설계과 학사.
년 포항공과대학교 2001
기계공학과 석사.
년 인간친화 2001~2006
복지로봇연구센터 위촉
연구원.
년 현재 기계공학과 박사과정
2006 ~ , KAIST .
관심분야 : HRI, Affective Human Robot Relationship, Reinforcement Learning.
Email : [email protected]
김 형 록
년 서울대학교 기계 2000
항공공학부 학사.
년 기계
2002 KAIST 공학과 석사.
현재 기
2002~ , KAIST 계공학과 박사과정.
관심분야 : Human-Robot Interaction.
Email : [email protected]
송 현 수
년 기계
2006 KAIST 공학과 학사.
년 기계
2008 KAIST 공학과 석사.
현재 기계
2008~ KAIST 공학과 박사과정.
관심분야 : Human-Robot Interaction, Robot's emotion generation and expression
Email : [email protected]