<응용기술논문> ISSN 2288-3991(Online)
하지강성 가변 인공건 액추에이터 (LeSATA
®)의 개발 Part I
- Metatarsophalangeal Joint Tilt Angle의 보행분석 -
한기봉* · 어은경* · 오승현* · 이순혁** · 김철웅*†* (주)트리플씨메디칼, ** 고려대학교 의과대학 안암병원 정형외과
Development of Leg Stiffness Controllable Artificial Tendon Actuator (LeSATA
®) Part I -
Gait Analysis of the Metatarsophalangeal Joint Tilt AnglesSoonhyuck -
Gi-Bong Han*, Eun-Kyung Eo*, Seung-Hyun Oh*, Soon-Hyuck Lee** and Cheol-Woong Kim*†
* R&D Center, Triple-C Medical Corp.
** Orthopedic Surgery, Korea University Anam Hospital
(Received November 13, 2013 ; Revised December 22, 2013 ; Accepted December 22, 2013)
Key Words: Leg Stiffness(하지강성), Metatarsophalangeal Joint(중족지절관절, MTPJ), Artificial Tendon Actuator (인공건 액추에이터), LeSATA®(르사타®), Compensatory Mechanism(보상기전)
초록: 기존의 보행분석 연구들은 하지를 하나의 스프링으로 간주하였다. 만약 슬관절 신전을 보조할 수 있는 슬관절 액추에이팅 메커니즘을 개발할 수 있다면 보행에 필요한 탄성-변형률에너지를 혁신적으로 저장-방출 할 수 있고, 그 결과 보행 중 하지강성은 더욱 증가할 것이다. 게다가 족관절 액추에이팅 메커니즘까지 추가 되어 있다면 슬관절 액추에이터에 의한 과도한 인공하지강성을 능동적이고 적절한 수준으로 보상해주는 기전 으로 작동할 것이다. 만약 가속도에 의한 보행속도 증가를 방지하기 위해 인위적 감속통제를 작동시킨다면 불필요한 운동에너지의 방출이 발생되고 하지강성 액추에이터의 실효성은 의심을 받게 된다. 따라서 본 저자 는 보행속도를 2개의 세그먼트에 의한 상대 각속도 조절기법을 이용하여 하지강성을 증가시킨다는 기본개념 으로 슬-족관절 액추에이터 시스템을 개발하였다. 또한 족관절에 슬관절 액추에이팅에 대한 보상기전이 존재 하는 경우, 족관절의 보상기전이 중족지절관절 경사각 및 보행속도 변화에 미치는 상호영향을 연구하였다.
Abstract: The established gait analysis studies have regarded leg as one single spring. If we can design a knee-ankle actuating mechanism as a primary actuator for supporting knee extension, it might be possible to revolutionary store or release elastic strain energy, which is consumed during the gait cycle, and as a result leg stiffness is expected to increase. An ankle joint actuating mechanism that stores and releases the energy in ankle joint is expected to support and solve excessive artificial leg stiffness caused by the knee actuator (primary actuator) to a reasonable extent. If unnecessary kinematic energy is released with the artificial speed reduction control designed to prevent increase in gait speed caused by increase in time passed, it naturally brings question to the effectiveness of the actuator. As opposed to the already established studies, the authors are currently developing knee-ankle two actuator system under the concept of increasing lower limb stiffness by controlling the speed of gait in relative angular velocity of the two segments.
Therefore, the author is convinced that compensatory mechanism caused by knee actuating must exist only in ankle joint. Ankle joint compensatory mechanism can be solved by reverse-examining the change in metatarso -phalangeal joint (MTPJ) tilt angle (=0°, =17°, =30°) and the effect of change in gait speed on knee activity.
†Corresponding Author, [email protected]
Ⓒ 2013 The Korean Society of Mechanical Engineers
1. 서 론
기존의 보행분석 연구에서는 하지를 하나의 스프링으로 간주하여 평가하였다. 보행에서 에너지원은 toe-off impulse와 hip torque로 이루어지고 hip torque를 줄이는 것이 가장 효율적인 보행이라게 정설이다.(1) 따라서 hip torque를 능동적으로 컨트롤하기 힘든 조건이라면, 반대개념으로 toe-off impulse를 증가시켜주면 보행에너
(a) patented design of LeSATA® (b) trial product (design mockup) of LeSATA® Fig. 1 Introduce of Leg Stiffness Artificial Tendon Actuator was called trade named LeSATA®
지를 보조할 수 있을 것이다. 입각기 말기(terminal stance)인 toe-off 시 stance limb에서는 슬관절 신전이 일어난 다. 이때 슬관절 신전을 보조할 수 있는 슬관절 액추에이팅 메카니즘(i.e., primary actuator)을 설계 제작한다면 보 행에 필요한 탄성변형에너지를 혁신적으로 저장-발산할 수 있고, 그 결과 하지강성(leg stiffness)은 증가할 것이 다. 또한, 보행 시 발생되는 운동에너지 및 인체에 의한 위치에너지(potential energy)의 일부는 collision phase에서 일시적으로 탄성 변형률 에너지로 저장되었다가 탄성코일에 의한 rebound phase에서 방출될 수 있으므로 이때 족관절에 이 에너지를 효율적으로 저장-방출해주는 족관절 액추에이팅 메카니즘(i.e., secondary actuator)을 추가로 제작한다면 슬관절 액추에이터에 의한 과도한 인공하지강성을 능동적이고 적절한 수준으로 보상해 줄 수 있을 것으로 생각된다. 본 저자는 하지를 하나의 스프링으로 간주했던 기존 연구들과 달리 보행속도를 two segment의 상대적 각속도로 컨트롤하여 하지강성을 증가시킨다는 개념으로 knee- ankle two actuator system을 개발하였다.
그러나 상기 언급한 바와 같이 인위적 슬관절 액추에이팅에 의해 분명히 족관절부에서는 보상을 요구하는 새로 운 보상기전(compensatory mechanism)이 발생할 것이다. 즉, 과도한 인위적 슬관절 액추에이팅은 하지강성을 지나 치게 증가시켜 족부디딤(foot touch-down) 시에 동반되는 비정상적 collision phase에 의해 발헛디딤 보행(stumbling gait)이 발생될 것이라는 본 저자의 가설이다. Andre Seyfarth는 입각기(stance phase) 중에 하지강성은 놀라울 정 도로 일정하고 유각기(swing phase) 동안 수평속도는 일정하게 유지되는 반면, 수직속도는 정점(apex)에서 0이 된 다고 보고하였다. 따라서 하지강성 증가를 위해 thigh와 shank로 구성된 two segment의 상대적 각속도는 상기 Andre Seyfarth의 조건에 충족시키되 전단계 보행의 유각기에서 가속도 증가가 반복되어 나타날 수 있는 시간경 과에 따른 보행속도 증가와 그로 인한 발헛디딤을 미리 예측하고 설계에 반영해야할 것이다. 또한 시간경과에 의한 보행속도 증가를 방지하기 위해 인위적 감속 통제로 인해 불필요한 운동에너지의 방출이 발생된다면 오히 려 액추에이터의 실효성을 의심케 할 수 있다고 판단된다. 결국 유각기에서의 반복적으로 하지강성 액추에이팅 이 지속된다면 정상보행 영역을 벗어나게 될 것으로 예측된다. 따라서 본 저자는 슬관절에서의 액추에이팅에 대 한 보상기전이 족관절 상에서 존재해야만 하며 족관절 보상기전은 중족지절관절 경사각(metatarsophalangeal joint (이하, MTPJ) tilt angle)의 변화와 보행속도 변화가 슬관절 운동에 어떠한 상호영향을 미치는가를 확인하여 역으 로 검토해 가면 그 해결책을 찾을 수 있을 것이라 확신한다. 본 연구에서는 과도한 하지강성에 의해 족관절 보 상기전이 발생하고 그로 인한 불이익으로 발헛디딤 보행이 발생하지 않도록 하기위해서 신개념의 하지강성 액 추에이터를 개발하였다. 본 연구그룹이 개발한 하지강성 컨트롤 액추에이터는 "Leg Stiffness Artificial Tendon Actuator (LeSATA®, 르사타®)"라 명명하였다. 본 기술의 보호와 상용화를 위해 특허등록(2,3) 및 상표등록(4)을 서두 른 바 있다. 또한 최근 LeSATA®에 비해 경량화된 하지보조기구가 특허출원(5)되었다. LeSATA®의 특허용 개략도 및 디자인목업은 Fig. 1과 같다. 액추에이터 내에 편심체(eccentric mass) 등을 추가로 설치하여 두 개의 스프링 간의 강성을 가변성있게 컨트롤할 수 있다. 이상을 바탕으로 본 연구에서는 LeSATA®의 설계이념, 작동원리를 설명하고, 이후에는 MTPJ tilt angle(=0°, =17°, =30°)에 따라 변화하는 hip-knee-ankle joint의 상호거동에 대 해 분석해보았다.
2. LeSATA®의 작동원리
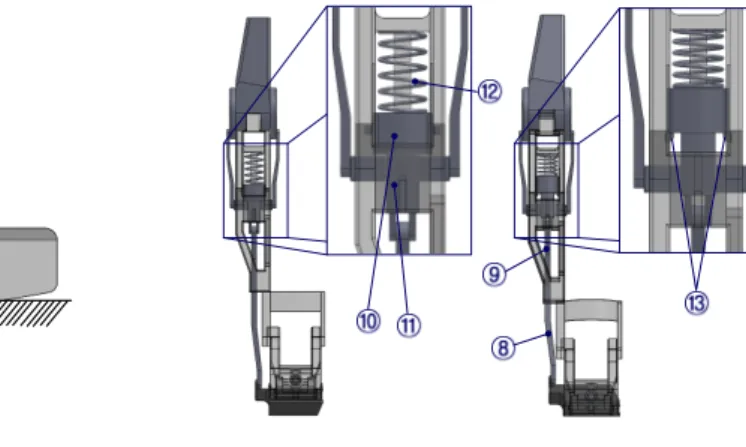
LeSATA®는 슬관절부 및 족부의 보상보행(compensatory walking) 거동을 만족시키기 위해 기본적으로 knee-ankle joint에 각각의 액추에이터가 장착된 구조이다. Fig. 2와 함께 작동원리를 간단히 살펴보면, Fig.
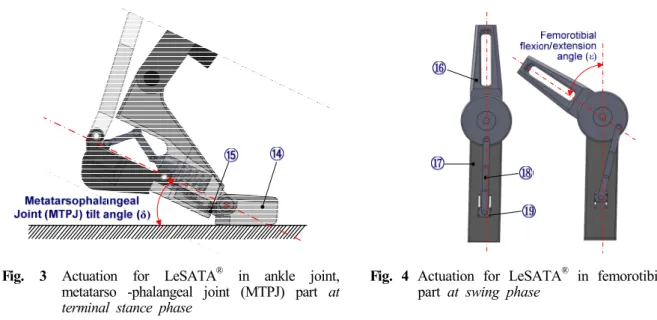
2(a)에서 입각기 초기의 부하반응기(loading response)시에 1) heel strike와 동시에 heel(①)의 가압이 이루어진 다. 2) 가압된 heel(①)에 의해 링크1(②)과 링크2(③)는 각각 정해진 범위 내에서 작동한다. 3) 링크2(③)에 의 해 피스톤1(④)은 전진 이동하며 코일 압축스프링1(⑤)을 가압하고 동시에 heel strike 시에 충격완화역할을 한다. 4) 전진이동한 피스톤1(④)은 피스톤1 하단에 존재하는 언더컷(⑦)이 잠금부(⑥)에 의해 후퇴가 불가하 며 코일압축스프링(⑤)의 탄성에너지를 저장한다. 한편 5) 가압된 힐(①)에 의해 Fig. 2(b)의 링크3(⑧)과 링크 4(⑨) 또한 각각 정해진 범위 내에서 작동한다. 6) 링크4(⑨)에 의해 피스톤2(⑪)는 상승이동하며 코일압축스 프링2(⑫)를 가압한다.(heel strike 시 충격흡수) 7) 상승이동한 피스톤2(⑪)에 의해 가압된 코일압축스프링2(⑫) 의 덮개(⑩)하단부는 잠금부(⑬)에 의해 하강이 불가하며 코일압축스프링2(⑫)의 탄성에너지를 저장한다. 또 한, Fig. 3의 말기입각기(terminal stance)시에 8) Toe-off 단계에서 Toe(⑭)는 작동스위치(⑮)를 가압하게 되고 타단은 잠금고리(⑥)를 가압한다. 9) 피스톤1의 언더컷(⑦)은 잠금고리(⑥)에서 벗어나 코일압축스프링1(⑤)의 저장된 탄성에너지를 방출하게 된다. 10) 코일압축스프링1(⑤)에 의해 피스톤1(④)은 후퇴하며 링크1(②)과 링 크2(③)에 의해 heel(①)은 원상복귀한다. 11) heel(①)의 원상복귀는 Toe-off 단계에서 강한 탄성에너지를 방출 하게한다. 마지막으로 유각기(swing phase) 단계(Fig. 4)에서 12) 링크5(⑱)는 대퇴부(⑯)와 연결되어 대퇴부(⑯) 의 굴곡 시 기설정된 범위 내에서 동작한다. 13) 링크5(⑱)의 타단은 슬라이드부재(⑲)와 연결되어 경골부(⑰) 측면에 형성되어 있는 가이드홈과 맞물려 수직이동된다. 14) 코일압축스프링2(⑫)는 잠금부(⑬)에 의해 하강 이 불가하여 대퇴부(⑯)의 굴곡에 영향을 주지 않는다. 15) 굴곡된 대퇴부(⑯)에 의해 슬라이드부재(⑲)는 상 승하며 잠금부(⑬)를 가압하게 된다. 16) 가압된 잠금부(⑬)는 코일압축스프링2(⑫)의 저장된 탄성에너지를 방 출케하며 대퇴부(⑯)의 신전 시 하지강성(leg stiffness)를 증가시킨다.
3. LeSATA®의 Double Spring Mechanism
이족보행운동에 의해 발생되는 인체상부의 위치에너지 일부는 heel strike의 collision phase에서 일시적으로 탄성변형에너지로 저장되고 반등구간에서 탄성반동에 의하여 방출된다.(6) 하지강성은 stride frequency와 지면 접촉시간과 같은 많은 운동역학적 변수에 영향을 미친다고 알져져 왔다.(7,8) 따라서 하지의 건은 근육-건 단 위의 컴플라이언스에 관계되고 하지강성에도 영향을 미친다.(9) 이족보행로봇을 개발하는데 있어서 하지강성
(a) Ankle joint and metatarsophalangeal joint (MTPJ) (b) Femorotibial joint (knee)
Fig. 2 Two-way actuation for LeSATA® in ankle joint, metatarsophalangeal joint (MTPJ) part and femorotibial joint at loading response phase
Fig. 3 Actuation for LeSATA® in ankle joint, metatarso -phalangeal joint (MTPJ) part at terminal stance phase
Fig. 4 Actuation for LeSATA® in femorotibial joint part at swing phase
의 인위적 조절을 통한 런닝의 가능성이 최근 10여년 전부터 제안되기 시작하였다.(10) 본 연구그룹이 개발중 인 LeSATA®는 두 개의 연속스프링으로 된 다수의 active coil을 변화시키는 개념을 도입하였다. LeSATA®에 적용된 액추에이팅 기본개념은 한방향 압축건이 다수 적용되며, 두 개의 헬리컬 압축스프링의 이상적 조화 에 의해 작동한다. 두 개의 스프링을 연결하는 강체커플러는 커플러 반시계 방향으로의 회전은 낮은 강성을 가진 스프링2의 active coil의 개수를 증가시키고 높은 강성을 가진 스프링1의 active coil의 개수는 감소시킨 다. 시계방향의 회전은 그 반대가 된다. 스프링1 및 스프링2는 식 (1)과 같이 및 의 강성을 보유한다.
(1)
여기서, 파라미터 i는 i번째 스프링과 스프링코일 개수이고, 는 두 스프링과 같다고 가정한다. 과 는 스 프링1과 스프링2의 코일강성이고 식 (2)와 같이 정의된다.
(2)
여기서, 는 평균코일지름이고, 는 코일와이어의 지름, 는 스프링의 전단탄성계수이다. 한 쌍의 스프링 1,2의 위치변화에 의한 스프링1,2가 보유한 활성코일수는 식 (3)과 같이 정의된다.
(3)
여기서 이고, 스프링1의 코일강성은 스프링2보다 배 높다고 가정한다. 그러므로 가 성립하 고, 스프링1의 유효강성()과 스프링2의 유효강성()은 각각 식 (4), 식 (5)와 같이 정의된다.
(4)
(5) 또한, 두 스프링의 합력강성()은 식 (6)과 같다.
(6)
4. LeSATA® 개선을 위한 선행연구 : 중족지절관절(MTPJ) 경사각에 따른 하지관절거동
4.1 보행분석을 통한 중족지절관절(MTPJ)의 변화에 대한 개요
인간의 보행은 고관절-슬관절-족관절(Hip-Knee-Ankle, 이하 HKA)에 의해 형성되어지는 동작패턴의 연속적 인 결과로 입각기(stance phase)와 유각기(swing phase)에서 일어나는 여러 변화의 정렬을 포함하고 있다. 이러 한 보행은 여러 가지 보행 주기로 분류되고, 인간의 보행패턴은 모든 하지기능패턴에서 각 관절의 유사한 동작 연관성을 제공하는데, 한 관절의 동작이 보행주기의 다른 여러 동작과 비교하여 매우 중요한 의미를 갖기 때문에 결과적으로 관절각과 타이밍은 매우 중요하다. 보행은 한쪽 다리가 입각기의 안정된 상태를 유 지하는 동시에 상대측 다리는 유각기 동안 몸을 전진시키는 연속적이고 반복적인 동작이라 할 수 있다.(11) 또한 100여개의 골격근이 상지와 하지의 여러 관절과 협응을 이루어야 가능한 복합적인 동작이며, 신체의 협응성은 두 분절간 혹은 분절과 관절의 운동이 다른 분절이나 관절에 어떠한 영향을 미치는가 알아보기 위 해 필요한 연구이다.(12,13) 김로빈(14)은 보행 시 속도와 보폭변화에 따른 하지관절의 운동학적 분석에서 보행 속도를 세 종류(slow, normal, fast)로 분류하고 분석을 실시하였다. 이 연구에서 속도가 증가할수록 스텝률은 증가하고 접지시간은 감소하였으며 보폭의 증가 시 step rate는 감소하고 접지시간은 증가하였다. 또한 속도 가 증가할수록 HKA의 운동범위가 증가한다고 하였다. 따라서 본 연구에서는 중족지절관절(metatarso- phalangeal joint, 이하 MTPJ)의 경사각(tilt angle, =0°, =17°, =30°)과 보행속도의 변화가 H-K-A로 연결되 는 하지관절들의 굴곡신전 및 보행주기에 어떠한 영향을 미치는가에 대해 평가하였다.
4.2 피험자 선정 및 보행분석 준비
본 연구에서는 지난 1년간 정형외과 병력이 없는 20세 여성 피험자 3명을 대상으로 하였다. 평균신장은 165cm, 평균체중은 59kg로 측정되었다. 피험자의 MTPJ tilt angle을 각각 =0°, =17°, =30°로 부여하였다.
Table 1 Morphology and treatment of metatarsophalangeal joint (MTPJ) in participants Participants Height (cm) Weight (kg) Foot size (mm)
#1 162 57 250
#2 163 62 250
#3 170 58 250
Fig. 5 Helen hayes marker set with three different metatarsophalangeal (MTPJ) tilt angle in participant #3
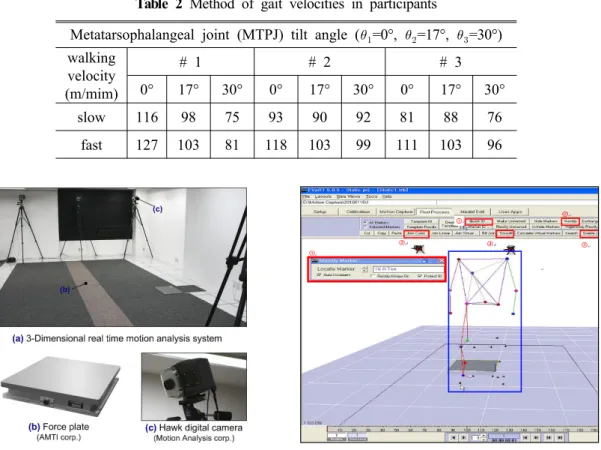
Table 2 Method of gait velocities in participants
Metatarsophalangeal joint (MTPJ) tilt angle (=0°, =17°, =30°) walking
velocity (m/mim)
# 1 # 2 # 3
0° 17° 30° 0° 17° 30° 0° 17° 30°
slow 116 98 75 93 90 92 81 88 76 fast 127 103 81 118 103 99 111 103 96
Fig. 6 Six-cameras system and force plate platform for measured walking speed and MTPJ tilt angle
보행분석 실시 전에 피험자의 신장, 체중, 발길이, 발폭 등을 측정하였고 그 정리내용은 Table 1과 같다. Fig.
5에 제시한 바와 같이 Helen Hayes marker set을 이용하여 어깨를 포함한 피험자의 관절부에 지름 10mm 크 기의 반사마커 21개를 부착하였다. 피험자가 정상보행(Normal Gait, 이하 NG)을 수행할 수 있도록 보행로를 9.3m×5.3m 크기로 배치하였다. Fig. 6에 제시된 바와 같이 보행로 주변으로 피험자의 관절부에 부착된 마커 의 움직임을 촬영할 수 있는 6대의 카메라(Hawk digital camera system, Motion Analysis Corp.)를 설치하여 60Hz로 촬영하였다. 보행로 중앙에 508×464mm2의 힘측정판(AMTI OR6-7, Advanced Mechanical Technology Inc.)을 2대 설치하였다. 보행분석 프로그램인 EVaRT와 OrthoTrak을 이용하여 전체적인 데이터분석이 이루어 졌다. 1차적으로 static testing을 실시하고 이후 보행에 의한 marker 이탈이 예상되는 medial marker 4개를 제 거한 후 dynamic testing을 실시하였다. 피험자가 의식보행을 하지 않도록 2시간 이상 충분한 보행연습을 수 행한 후 본 실험에 돌입하였다. 보행속도는 피험자의 자연스러운 정상보행(NG) 및 빠른 보행(Fast Gait, 이하 FG)으로 구분하였다. NG 및 FG의 걸음수, 시간 등을 각각 3회 측정하고 평균산술 후 분당비트수(이하 BPM) 로 환산하였다. 계산된 BPM은 메트로놈을 이용하여 각각의 보행속도당 30회의 보행 후 보행속도변화에 따 른 HKA 상호 운동에 대한 데이터를 측정하였다.
4.3 보행분석자료 처리법
보행동작은 보행속도에 따라 시상면에서 관찰되는 굴곡-신전운동이며 하지관절에 가장 크게 영향을 미치 는 요인이다. 본 연구에서는 Table 2와 같이 각각 MTPJ tilt angle(=0°, =17°, =30°)과 보행속도를 변화시 켜 30회 반복 측정한 데이터들을 EVaRT Program에 적용하였다. 측정데이터 분석 후 HKA에서 가장 평균적 인 거동을 보이는 하나의 Gait Cycle(이하, GC) 그래프를 채택하였다. 이후 NG 및 FG 데이터들의 평균값을 산출하여 보행속도 및 MTPJ tilt angle(=0°, =17°, =30°)의 변화에 따른 HKA joint 시상면 상에서의 굴곡 -신전 운동을 면밀히 분석하였다.
4.4 중족지절관절 경사각(MTPJ tilt angle)에 대한 기존 연구
보행 시 인체중심점(Center of Body Mass, 이하 CBM)과 압력중심점(Center of Pressure, 이하 COP)의 이동 은 에너지 변화에 지대한 영향을 미친다. 특히 MTPJ tilt angle 증가는 CBM과 COP의 인위적 거리변화를 유 도한 보행이기 때문에 운동역학 및 운동형상학 관점에서 각 관절에 부정적인 영향을 미친다. MTPJ tilt angle 변화의 대표적 사례는 하이힐 착용이며 그에 대한 기존 임상적 연구는 다음과 같다. 구두굽 증가에 따른 MTPJ tilt angle의 증가는 요추 및 하지부에 부하가 증가되며, CBM이 이동함에 따라 보행자세가 불안정하게 나타났다.(15) Heel 높이의 상승이 슬개대퇴골 관절부의 하중부하를 평균 23% 증가시켜 골관절염이 유발되며, 보행불안정으로 인한 족부염좌 및 인대파열이 발생되는 것이 보고되었다.(16) 하이힐로 인한 보행불안정은 근 육에 긴장도를 증가시켜 근피로도를 가중시키고 지면과 족부가 닿는 COP가 외측으로 이동하게 되어 내측비 복근과 외측비복근의 불균형이 나타나는 문제점이 발생된다.(17) 상기와 같이 MTPJ tilt angle 변화에 따른 관 련 하지 근육들의 비정상적 거동 및 그에 대한 보상기전 등에 대한 연구는 다수 수행된 바 있다. 그러나 MTPJ tilt angle이 HKA joint로 연결되는 하지관절 시스템 전반에 어떠한 영향을 미치는가에 대한 연구는 미 흡한 편이다. 따라서 본 연구는 보행속도와 MTPJ tilt angle 변화에 따른 HKA Joint의 상호운동 특성에 대해 분석하였다. 또한 입각기의 속도 변화에 따른 HKA joint angle의 상호변화도 분석하였다. 간단히 정리해보면, 보행속도가 빠를수록 HKA의 운동범위는 증가하였고 각 peak angle에 도달하는 phase는 대부분 지연되었다.
-10 0 10 20 30 40 50 60 70 80
Knee joint
-10 0 10 20 30 40 50 60 70 80
Knee joint
-10 0 10 20 30 40 50 60 70 80
Knee joint
-20 -10 0 10 20 30 40
50 MTPJ tilt angle = 0° (Heel : 0cm) 127 BPM , 116 m/min 143 BPM , 127 m/min
Hip joint
-20 -10 0 10 20 30 40
50 MTPJ tilt angle = 17° (Heel : 5cm) 107 BPM , 98 m/min 115 BPM , 103 m/min
Hip joint
-20 -10 0 10 20 30 40
50 MTPJ tilt angle = 30° (Heel : 8.5cm) 90 BPM , 75 m/min
99 BPM , 81 m/min
Hip joint
0 10 20 30 40 50 60 70 80 90 100
-50 -40 -30 -20 -10 0 10 20
Ankle joint
Gait Cycle(%) 0 10 20 30 40 50 60 70 80 90 100
-50 -40 -30 -20 -10 0 10 20
Gait Cycle(%)
Ankle joint
0 10 20 30 40 50 60 70 80 90 100
-50 -40 -30 -20 -10 0 10 20
Gait Cycle(%)
Ankle joint
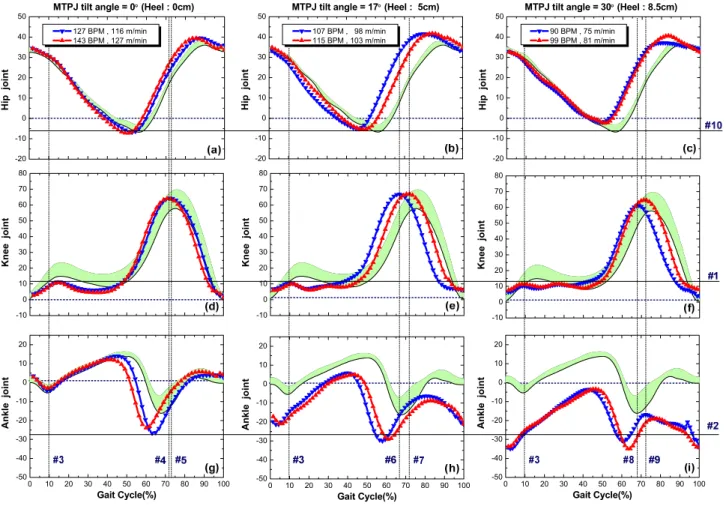
Fig. 7 Relationship between metatarsophalangeal joint (MTPJ) tilt angle (=0°, =17°, =30°) and change of walking speed in participant #1 (h=162cm, w=57kg, Rt)
대부분의 hip joint angle에서는 유의성이 나타나지 않았으나 knee와 ankle에서는 각각의 peak 값을 중심으로 GC의 변화와 HKA angle의 변화가 나타났다. 더욱 상세한 내용은 4.5절과 4.6절에서 언급하도록 하겠다.
4.5 보행속도 변화에 따른 고관절-슬관절-족관절(HKA joint)의 거동
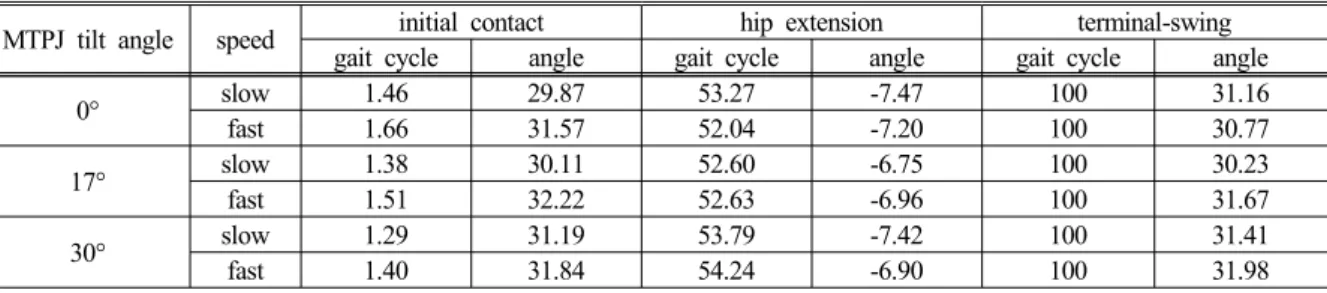
보행속도 및 MTPJ tilt angle(=0°, =17°, =30°)의 변화가 HKA joint movement에 어떠한 영향을 미치는 가를 파악하기 위해 피험자 #1의 보행분석 결과를 선택적으로 고찰해 보았다. Fig. 7(a)~(i)는 피험자 #1의 보 행속도 및 MTPJ tilt angle 증가에 따른 HKA joint angle의 변화를 나타낸 그래프이다. 또한 Table 3~5는 MTPJ tilt angle(=0°, =17°, =30°)의 변화에 따른 hip-knee-ankle의 flexion angle을 각각 정리한 표이고, Table 6,7은 NG와 FG 경우에서 입각기 및 유각기 시 =0°, =17°, =30°의 peak flexion을 정리한 표이다.
HKA joint의 MTPJ tilt angle(=0°, =17°, =30°) 변화를 관찰한 후 NG, FG에 따른 거동 차이를 분석해 보 았다. 첫째로 MTPJ tilt angle=0°경우(=0°) (Fig. 7(a),(d),(g)), 초기입각기(initial contact, GC:0~10%)부터 말기입 각기(terminal stance, GC:40%)까지는 NG와 FG가 거의 유사한 거동을 나타냈다. 그러나 유각기(GC:40%이후) 부터는 FG가 NG보다 GC단계가 단축되고 있음을 파악할 수 있다. MTPJ tilt angle=0°, =30°일 때(=0°,
=17°)에는 반대로 NG가 FG보다 GC단계가 단축되고 있음을 알 수 있다. 그 이유는 1차적으로 보행속도와 Table 3 Change of hip flexion angle according to the metatarsophalangeal joint (MTPS) tilt angle (=0°, =17°,
=30°) and walking speed, i.e., normal gait (NG) and fast gait (FG) in participants
MTPJ tilt angle speed initial contact hip extension terminal-swing
gait cycle angle gait cycle angle gait cycle angle
0° slow 1.46 29.87 53.27 -7.47 100 31.16
fast 1.66 31.57 52.04 -7.20 100 30.77
17° slow 1.38 30.11 52.60 -6.75 100 30.23
fast 1.51 32.22 52.63 -6.96 100 31.67
30° slow 1.29 31.19 53.79 -7.42 100 31.41
fast 1.40 31.84 54.24 -6.90 100 31.98
Table 4 Change of knee flexion angle according to the metatarsophalangeal joint (MTPS) tilt angle (=0°, =17°,
=30°) and walking speed, i.e., normal gait (NG) and fast gait (FG) in participants
MTPJ tilt angle speed initial contact stance phase peak swing phase peak
gait cycle angle gait cycle angle gait cycle angle
0° slow 1.45 -0.09 15.58 13.63 72.78 63.23
fast 1.65 1.53 15.81 15.99 71.84 64.37
17° slow 1.37 0.66 15.00 15.24 72.33 66.35
fast 1.51 3.91 14.95 16.66 74.25 66.95
30° slow 1.29 4.18 14.36 18.42 72.66 61.56
fast 1.40 5.44 15.03 22.08 74.34 63.89
Table 5 Change of ankle flexion angle according to the metatarsophalangeal joint (MTPS) tilt angle (=0°,
=17°, =30°) and walking speed, i.e., normal gait (NG) and fast gait (FG) in participants MTPJ tilt
angle speed initial contact ankle maximum dorsi-flexion
ankle minimum
plantar-flexion pre-swing gait cycle angle gait cycle angle gait cycle angle gait cycle angle
0° slow 1.45 -1.66 46.85 13.22 65.49 -20.89 100 -2.15
fast 1.65 -1.74 44.75 11.49 63.00 -20.25 100 -2.31
17° slow 1.37 -16.86 47.50 5.25 64.96 -26.20 100 -17.86
fast 1.51 -16.08 54.81 4.68 59.41 -26.65 100 -18.20
30° slow 1.29 -30.44 48.26 -5.97 65.40 -33.97 100 -30.24
fast 1.40 -29.55 50.51 -5.23 66.87 -35.55 100 -29.92
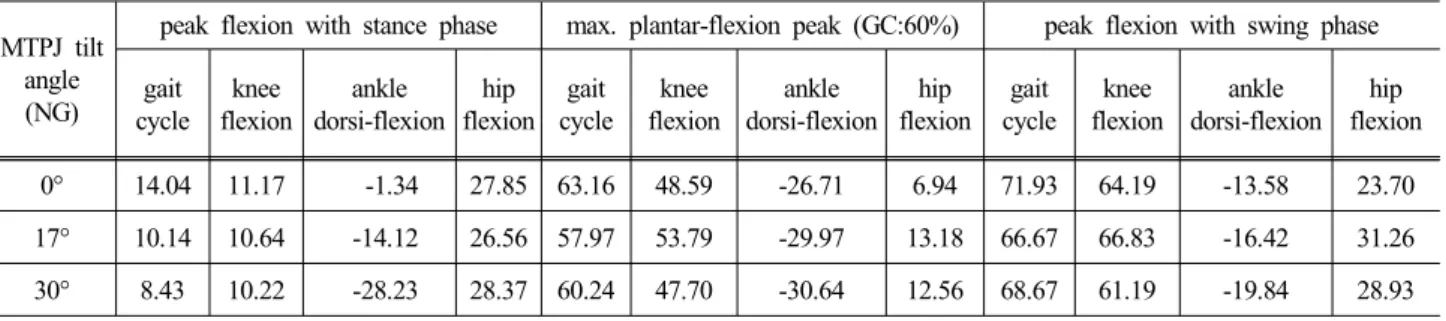
Table 6 Results of peak flexion with st. phase, max. plantar-flexion, and peak flexion with sw. phase by normal gait (NG)
MTPJ tilt angle (NG)
peak flexion with stance phase max. plantar-flexion peak (GC:60%) peak flexion with swing phase gait
cycle knee flexion
ankle dorsi-flexion
hip flexion
gait cycle
knee flexion
ankle dorsi-flexion
hip flexion
gait cycle
knee flexion
ankle dorsi-flexion
hip flexion 0° 14.04 11.17 -1.34 27.85 63.16 48.59 -26.71 6.94 71.93 64.19 -13.58 23.70 17° 10.14 10.64 -14.12 26.56 57.97 53.79 -29.97 13.18 66.67 66.83 -16.42 31.26 30° 8.43 10.22 -28.23 28.37 60.24 47.70 -30.64 12.56 68.67 61.19 -19.84 28.93
Table 7 Results of peak flexion with st. phase, max. plantar-flexion, and peak flexion with sw. phase by Fast gait (FG)
MTPJ tilt angle (FG)
peak flexion with stance phase max. plantar-flexion peak (GC:60%) peak flexion with swing phase gait
cycle
knee flexion
ankle dorsi- flexion
hip flexion
gait cycle
knee flexion
ankle dorsi- flexion
hip flexion
gait cycle
knee flexion
ankle dorsi- flexion
hip flexion 0° 14.55 10.85 0.23 27.30 60.00 42.84 -23.87 4.03 70.91 64.03 -7.43 25.71 17° 10.94 9.97 -16.31 28.54 60.94 49.96 -29.06 9.65 71.39 67.01 -16.01 31.55 30° 8.22 11.37 -27.03 29.34 63.01 51.41 -34.87 15.69 71.23 64.69 -22.69 30.69
직접적인 관련이 있고(ex. Fig. 7(b),(c)의 보행속도 참고), 2차적으로는 MTPJ tilt angle과 관련이 있는 것으로 판단된다. 즉, NG와 FG의 차이만큼 비례하게 GC의 단축량이 결정되었으나 MTPJ tilt angle의 증가량과 GC 의 단축 정도가 꼭 비례하지는 않았다. 한편, MTPJ tilt angle의 변화에 따른 hip joint의 거동을 살펴보면(Fig.
7(a)~(c)의 #10), MTPJ tilt angle이 증가할수록 hip max. extension angle은 감소하는 경향을 나타냈다. 따라서 hip joint extension의 감소와 ankle joint(Fig. 7(g)~(i)의 #2)의 plantar-flexion의 증가는 상호 대응적 거동을 나타 냄을 알 수 있었다. knee joint의 경우(Fig. 7(d)~(f)), MTPJ =0일 때 mid. stance에서의 knee flexion은 뚜렷하 게 나타났지만, MTPJ =17°, =30°일 때는 거의 나타나지 않았다. 이는 MTPJ tilt angle이 증가됨에 따라 CBM이 인체전방으로 전위하고, 무게중심 변화에 대한 trunk와 thigh 간의 보상작용으로 knee flexion이 불안 정해 진 것으로 판단된다. 슬관절에서의 유각기 최대값(peak flexion with swing phase)은 MTPJ =17°일 때가 MTPJ =0°일 때보다 flexion이 미세하게 증가되었지만, MTPJ =30°일 때에는 다소 감소하였다. ankle joint 는 Fig. 7(g)~(i) 그래프에 제시된 바와 같이 MTPJ tilt angle의 증가분에 상응하는 거동을 보였는데, MTPJ tilt angle만큼 초기 접기기 때에는 plantar-flexion되었고, loading response 시점은 MTPJ tilt angle이 증가할수록 GC10%(Fig. 7(#3))에 GC 3%정도로 감소되었다. 그 이유는 MTPJ tilt angle이 증가할수록 초기접지기 때 뒤꿈 치 접촉부가 지면에 가까워지기 때문에 짧은 시간에 뒤꿈치 라커를 제한하여 원활한 충격흡수를 유도하기 위해 knee flexion을 보상시켰기 때문이다. 결국 보행속도 자체에 더 지대한 영향을 받았음을 파악할 수 있 다. 이러한 현상은 knee-ankle 상호작용에 의한 것으로 knee extension 시 ankle은 plantar-flexion되고, knee flexion 시 ankle은 dorsi-flexion되는 것과 같은 보상원리이다. 따라서 MTPJ =30°일 때 knee extension에 의한 ankle plantar-flexion은 크게 제한을 받기 때문에 Fig. 7(f),(i)와 같이 knee-ankle flexion은 제한된다. 한편 보행 속도의 관점에서 NG와 FG의 GC를 살펴보자. hip joint의 경우 peak extension point의 GC변화를 관찰하면 Fig. 7(a),(c)는 NG와 FG가 거의 차이가 없었고, Fig. 7(b)의 경우에만 NG와 FG가 약 5%의 차이가 나타났다.
즉, 보행속도와 GC의 관계에서는 MPTJ tilt angle의 영향보다는 보행속도 자체에 더 지대한 영향을 받았음을 파악할 수 있다. 그러나 knee joint의 경우에는 MTPJ =17°, =30°일 때가 MTPJ =0°일 때보다 FG가 NG 보다 GC 약간 증가되었음을 관찰할 수 있었다. 이는 FG일 때가 NG일 때보다 peak knee flexion 도달시점이 지연된다는 뜻으로 GC 60% 전후 발생되는 ankle plantar-flexion(Fig. 7(h)(i)의 plantar-apex point)의 NG, FG curve와 직접적으로 상응하는 거동을 나타냈기 때문이라고 사료된다. 한편, ankle joint의 경우를 살펴보면
MTPJ =17°, =30°일 때는 MTPJ =0°일 때와 달리 FG는 NG보다 GC가 지연되었다.(Fig. 7(g)~(i)참조). 또 한 Toe-off가 발생하는 전유각기 ankle joint angle의 max. plantar-flexion과 max. dorsiflexion는 MTPJ =0°,
=17°일 때, NG의 GC에서 최대값을 나타내었고, MTPJ =30°일 때는 FG의 GC에서 최대값을 나타내었다.
4.6 보행속도변화(FG vs. NG)에 따른 Joint Angle의 비율 변화
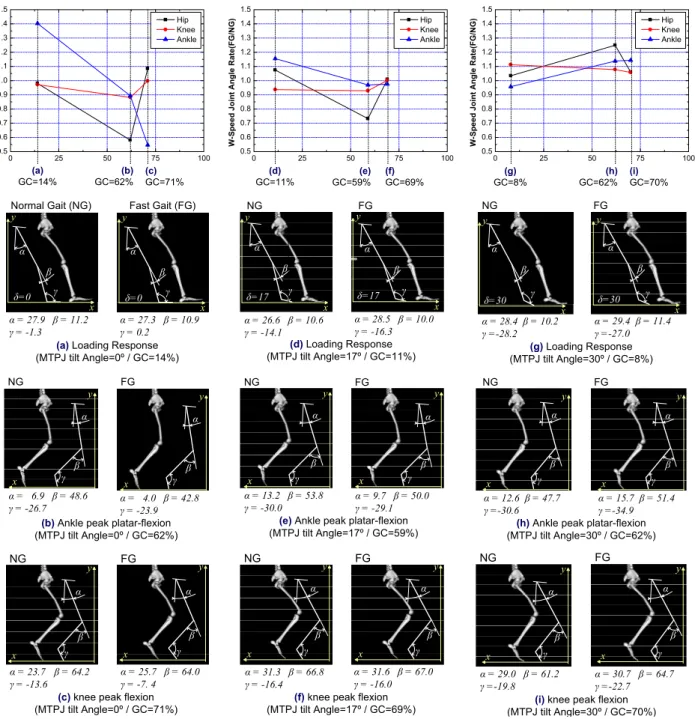
앞 절의 내용을 바탕으로 피험자 #1의 보행속도 및 MTPJ tilt angle의 변화에 따른 HKA joint movement를 이용하여, FG와 NG의 GC에 따른 joint angle rate(이하, JAR)를 고찰해 보았다. Fig. 8(a)~(i)는 MTPJ tilt angle 변화에 따른 GC에 따른 HKA JAR을 그래프로 나타낸 것이다. 여기서 Fig. 8(a),(d),(g)는 각각 MTPJ =0°,
Normal Gait (NG)
(a)Loading Response (MTPJ tilt Angle=0º / GC=14%) δ=0
α β
γ
Fast Gait (FG) NG FG
x y
x y
α = 27.9 β = 11.2 γ = -1.3
α = 27.3 β = 10.9 γ = 0.2
α = 26.6 β = 10.6 γ = -14.1
α = 28.5 β = 10.0
γ = -16.3 α = 28.4 β = 10.2
γ =-28.2
α = 29.4 β = 11.4 γ =-27.0 x
y
δ=0 x
y
x y
x y
α α α α α
α α α α α α
α α α α α α
β β β β β
β β β β β β
β β β β β β
γ γ γ γ γ
γ γ γ γ γ γ
γ γ γ γ γ γ
NG FG
NG FG NG FG
x
y
x
y
x
y
x
y
x
y
x
y
x
y
x
y
x
y
x
y
x
y
x
NG FG NG FG y
0 25 50 75 100
0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5
W-Speed Joint Angle Rate(FG/NG) Hip
Knee Ankle
0 25 50 75 100
0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5
W-Speed Joint Angle Rate(FG/NG) Hip
Knee Ankle
0 25 50 75 100
0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5
W-Speed Joint Angle Rate(FG/NG) Hip
Knee Ankle
(a)
GC=14% (b)
GC=62% (c) GC=71%
α = 6.9 β = 48.6
γ = -26.7 α = 4.0 β = 42.8 γ = -23.9
α = 13.2 β = 53.8 γ = -30.0
α = 9.7 β = 50.0
γ = -29.1 α = 12.6 β = 47.7
γ =-30.6
α = 15.7 β = 51.4 γ =-34.9
α = 23.7 β = 64.2 γ = -13.6
α = 25.7 β = 64.0 γ = -7. 4
α = 31.3 β = 66.8 γ = -16.4
α = 31.6 β = 67.0
γ = -16.0 α = 29.0 β = 61.2
γ =-19.8
α = 30.7 β = 64.7 γ =-22.7
δ=17 δ=17 δ=30 δ=30
(d) GC=11%
(e) GC=59%
(f) GC=69%
(g) GC=8%
(h) GC=62%
(i) GC=70%
NG FG
NG FG
(b)Ankle peak platar-flexion (MTPJ tilt Angle=0º / GC=62%)
(c)knee peak flexion (MTPJ tilt Angle=0º / GC=71%)
(d)Loading Response
(MTPJ tilt Angle=17º / GC=11%) (g)Loading Response (MTPJ tilt Angle=30º / GC=8%)
(e)Ankle peak platar-flexion
(MTPJ tilt Angle=17º / GC=59%) (h)Ankle peak platar-flexion (MTPJ tilt Angle=30º / GC=62%)
(f)knee peak flexion
(MTPJ tilt Angle=17º / GC=69%) (i)knee peak flexion (MTPJ tilt Angle=30º / GC=70%)
Fig. 8 Hip-knee-ankle joint angle rate at loading response, ankle peak plantar-flexion and knee peak flexion by metatarsophalangeal joint (MTPJ) tilt angle and change of walking speed in participant #1 (h=162cm, w=57kg, Rt)
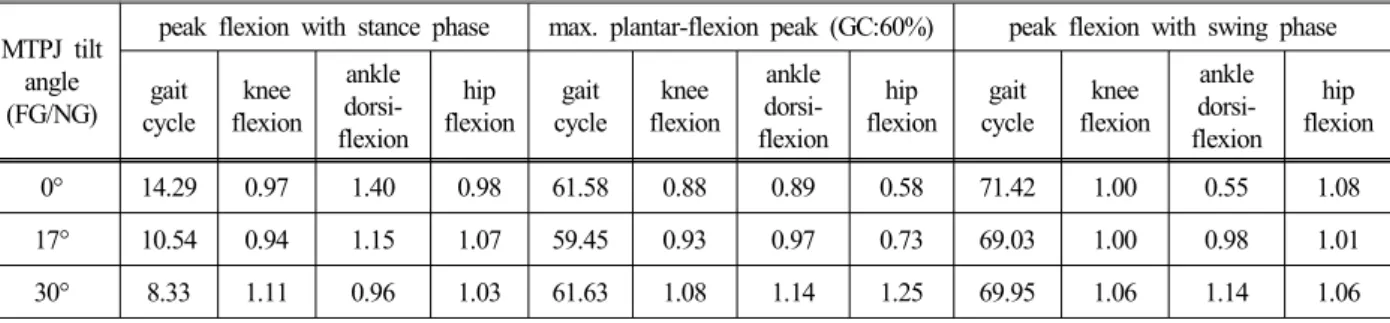
Table 8 Results of peak flexion with st. phase, max. plantar-flexion, and peak flexion with sw. phase by Fig. 8 graphs
MTPJ tilt angle (FG/NG)
peak flexion with stance phase max. plantar-flexion peak (GC:60%) peak flexion with swing phase gait
cycle
knee flexion
ankle dorsi- flexion
hip flexion
gait cycle
knee flexion
ankle dorsi- flexion
hip flexion
gait cycle
knee flexion
ankle dorsi- flexion
hip flexion 0° 14.29 0.97 1.40 0.98 61.58 0.88 0.89 0.58 71.42 1.00 0.55 1.08
17° 10.54 0.94 1.15 1.07 59.45 0.93 0.97 0.73 69.03 1.00 0.98 1.01
30° 8.33 1.11 0.96 1.03 61.63 1.08 1.14 1.25 69.95 1.06 1.14 1.06
=17°, =30°일 때의 부하반응기에서의 hip-knee-ankle joint의 관절간 각도를 측정한 값이다. 특히 loading response시의 knee flexion에 관심을 두었다. Fig. 8(b),(e),(h)는 각각 MTPJ =0°, =17°, =30°의 ankle plantar-flexion일 때로 GC구간 약 60%에 해당된다. knee peak flexion 시점과 ankle peak plantar-flexion, knee peak flexion에 중점을 두었다. 마지막으로 Fig. 8(c),(f),(i)는 각각 MTPJ =0°, =17°, =30°일 때의 knee peak flexion일 때로 GC구간 약 70%에 해당된다. Fig. 8 상단의 walking speed joint angular rate(FG/NG)는 FG 일 때의 HKA JAR과 NG일 때의 HKA JAR을 나눈 값으로 보행속도 대비 hip-knee-ankle joint의 상관관계를 나타내는 지표이다. FG일 때의 joint angle과 NG일 때의 joint angle의 값이 같은 1일 때의 기준으로 값이 크 고 작음을 나타내었는데, 1을 기준으로 값을 보게 되면 1 이상은 굴곡(flexion)에 해당되고 1미만은 신전 (extension)에 해당된다는 것을 확인 할 수 있었다. 선택된 3개의 GC지점에서 NG 및 FG일 때의 HKA joint angle은 Fig. 8 상단그래프 이하 그림으로 표현하였다. 여기서 는 hip joint angle , 는 knee joint angle , 는 ankle joint angle을 말한다. Fig. 8(a),(b),(c)는 MTPJ =0°일 때의 HKA JAR이다. 여기서 (a)~(c)의 GC는 각각 14%, 62%, 71%를 나타낸다. Fig. 8(a)(MTPJ =0°)에 해당하는 GC 14% 경우, ankle JAR이 기준 1 이상을 나 타냈다. 그러나 knee JAR과 hip JAR의 경우는 기준 1을 상회하지는 않았지만 hip과 knee 모두 JAR은 약 0.98 정도의 유사한 값이 측정되었다. 한편, Fig. 8(b)(MTPJ =0°)에 해당하는 GC 62% 경우, 모두 기준 1을 상회 하지 못했으며, hip의 경우 약 0.6을 나타냈고 ankle과 knee는 약 0.9 정도의 유사한 값이 측정되었다. Fig.
8(c)(MTPJ =0°)에 해당하는 GC 71% 경우, hip만 기준 1을 상회했고, knee와 ankle은 기준 1을 상회하지 못 했다. Fig. 8(a) 시점의 hip과 ankle에서는 FG일 때 joint angle 변화가 없었고, ankle은 dorxiflexion 된 것을 확 인할 수 있었다. Fig. 8(b) 시점에서는 HKA joint angle 모두 extension된 것을 확인할 수 있었고, Fig. 8(c) 시 점에서는 hip을 제외한 knee, ankle은 신전(extension)되었다. Fig. 8(d)~(f)는 MTPJ =17°일 때의 HKA JAR을 나타낸 것이다. 여기서 Fig. 8(d)~(f)(MTPJ =17°)의 GC는 각각 11%, 59%, 69%를 나타낸다. Fig. 8(d)(MTPJ
=17°)에 해당하는 GC 11% 경우, knee를 제외한 hip, ankle의 JAR은 기준 1을 상회했고, Fig. 8(e)(MTPJ
=17°)에 해당하는 GC 59% 경우, HKA 모두 기준 1을 상회하지 못했다. 그러나 Fig. 8(f)(MTPJ =17°)에 해 당하는 GC 69% 경우, JAR이 유사한 값을 나타냈다. Fig. 8(d)(MTPJ =17°)에 해당하는 GC 11% 시점의 hip 과 ankle에서는 flexion이 나타났고, Fig. 8(e)(MTPJ =17°)에 해당하는 GC 59% 시점에서는 JAR이 모두 신전 된 것을 확인하였다. 그러나 Fig. 8(f)(MTPJ =17°)에 해당하는 GC 69% 시점에서는 HKA JAR의 변화가 없 었다. 마지막으로 Fig. 8(g)~(i)는 MTPJ =30°일 때의 HKA JAR을 나타낸 것이다. 여기서 Fig. 8(g)~(i)의 GC 는 각각 8%, 62%, 70%를 나타낸다. Fig. 8(g)(MTPJ =30°)에 해당하는 GC 8%일 때 ankle 제외한 hip, knee 의 JAR은 기준 1을 상회했고, Fig. 8(h),(i)(MTPJ =30°)에 해당하는 GC 62%, 70%일 때에는 HKA 모두 기준 1을 상회하지 못했다. 또한 Fig. 8(g)시점(GC 8%)에서는 ankle을 제외한 hip과 knee에서는 flexion이 나타났고, (h)시점(GC 62%) 및 (i)시점(GC 70%)에서는 JAR이 모두 flexion된 것으로 확인하였다. 여기서 알 수 있는 사 실은 MTPJ tilt angle이 증가하고 동시에 FG인 조건에서 GC의 변화는 크게 나타나지 않았다는 점이다. MTPJ tilt angle이 증가할수록 각 시점 별 HKA JAR의 변화는 Fig. 8(a),(d),(g) 즉 초기입각기 시점에서 ankle의 JAR 값의 변화가 크다는 점을 알 수 있다. 이는 MTPJ tilt angle이 증가하면서 나타날 수 있는 지극히 당연한 결 과이다. 그에 비해 hip은 변화가 없었고, knee는 MTPJ =30°일 때 큰 값을 나타냈다.
5. 결 론
(1) 보행 시 발생되는 운동에너지 및 인체에 의한 위치에너지의 일부는 collision phase에서 일시적으로 탄 성 변형률 에너지로 저장되었다가 탄성코일에 의한 rebound phase에서 방출될 수 있으므로 이 에너지를 효율 적으로 저장-방출해주는 족관절 액추에이터의 개념을 설계하고, 입각기 말기에 슬관절 신전을 보조하여 보행 에 필요한 탄성변형에너지를 혁신적으로 저장-발산하고 하지강성을 증가시키는 슬관절 액추에이팅 메카니즘 의 개념을 설계하였다. 상기 두 개념을 바탕으로 하지를 하나의 스프링으로 간주했던 기존 연구들과 달리 보행속도를 two segment의 상대적 각속도로 컨트롤하여 하지강성을 증가시킨다는 개념으로 knee-ankle two actuator system을 설계한 후 과도한 하지강성에 의한 족관절 보상기전과 발헛디딤 보행이 발생하지 않는 신 개념의 하지강성 액추에이터(LeSATA)를 독자 개발하고 슬관절-족부에 장착된 하지강성 컨트롤 액추에이터 의 상호작동원리를 설명하였다.
(2) MTPJ tilt angle이 증가할수록 hip max. extension angle은 감소하였고, knee joint의 경우 MTPJ tilt angle=0°일 때 mid. stance에서의 knee flexion은 뚜렷하게 나타났지만, MTPJ tilt angle=17°, 30°일 때는 거의 나타나지 않았다. ankle joint는 MTPJ tilt angle의 증가분에 상응하는 거동을 보였는데, MTPJ tilt angle만큼 초 기 접기기 때에는 plantar-flexion되었고, loading response 시점은 MTPJ tilt angle이 증가할수록 GC10%에서 GC3%정도로 감소되었다.
(3) Metatarsophalangeal joint (MTPJ) tilt angle (=0°, =17°, =30°)과 2단계 보행속도(normal gait (NG) vs.
fast gait(FG))의 조건에서 hip의 굴곡-신전각의 변화를 관찰한 결과, MTPJ tilt angle 및 보행속도에 크게 의존 적이지 않았다. 그러나 knee flexion-extension angle은 MTPJ tilt angle 증가시 입각기 peak flexion angle이 증가 하였다. 한편 ankle에서의 flexion-extension angle은 MTPJ tilt angle이 증가할수록 전체적으로 plantar-flexion이 증가되었다. 즉 MTPJ tilt angle이 증가로 인해 toe-off시 감쇠된 탄성에너지를 보상하기 위해 dorsi-flexion보다 는 plantar-flexion를 더욱 증가시키는 기전을 작동시키는 것으로 판단했다. 또한 보행주기(GC)에서는 보행속 도가 빨라질수록 입각기 기간이 단축되는 것으로 확인되었다. 이는 보행속도 증가에 따라 인체중심점(CBM) 과 압력중심점(COP)이 전방전위되므로 입각기 대비 유각기의 GC를 연장하는 정책으로 안정적 보행속도 유 지를 도모코자 하기 위함이라고 생각한다.
후 기
본 연구는 보건복지부 보건의료연구개발사업(노인장애인재활보조기구개발)의 지원에 의하여 이루어진 것 임. (과제고유번호 : A110657)
참고문헌
(1) Hong, H., Kim, S., Kim, C.-W., Lee, S. and Park, S., 2013, "Spring-Like Gait Mechanics Observed During Walking in Both Young and Older Adults," Journal of Biomechanics, Vol.46, pp.77~82.
(2) Kim, C.-W. and Han, G.-B., 2012, "Energy Storage-Emission Type of Ankle Joint and Foot in Gait Assistance Device," Certificate of Patent, Patent No. 10-1187018, Korea.
(3) Kim, C.-W. and Han, G.-B., 2013, "Energy Storage-emission Type of Knee-ankle Joint in Gait Assistance Device," Certificate of Patent, Patent No. 10-1221331, Korea.
(4) Kim, C.-W., 2012, "LeSATA®," Certificate of Trademark Registration, Registration No. 40-0904164, Korea.
(5) Kim, C.-W., Oh, S.-H. and Han, G.-B., 2013, "Gait Assistance Device Including Energy Storage Unit by Ratchet," Patent Application, Patent No. 10-2013-0012364, Korea.
(6) Kuo, A.D., Donelan, J.M. and Ruina, A., 2005, "Energetic Consequences of Walking like an Inverted
Pendulum: Step-to-step Transitions," Exercise and Sport Sciences Reviews, Vol.33, No.2, pp.88~97.
(7) McMahon, T. and Cheng, G., 1990, "The Mechanics of Running: How does Stiffness Couple with Speed,"
Journal of Biomechanics, Vol.23, pp.65~78.
(8) Farley, C.T. and Gonzalez, O., 1996, "Leg Stiffness and Stride Frequency in Human Running," Journal of Biomechanics, Vol.29, pp.181~186.
(9) Alexander, R.M., 1988, "Elastic Mechanisms in Animal Movement," Cambridge University Press.
(10) Ferris, D.P., Louie, M. and Farley, C.T., 1998, "Running in the Real World: Adjusting Leg Stiffness for Different Surfaces," The Royal Society B: Biological Sciences, Vol.265, pp.989~994.
(11) Perry, J., 1992, "Gait Analysis: Normal and Pathological Function," New Jersey, SLACK.
(12) Whittle, M.W., 1990, "Gait Analysis: An Introduction," Oxford: Orthopaedic Engineering Center, University of Oxford.
(13) Bates, B.T. and Haven, B.H., 1973, "Effects of Fatigue on Mechanical Characteristics of Highly Skilled Female Runners," In. Biomechanics IV, Nelson & Morehouse(Eds.), pp.121~125.
(14) Kim, R.-b., 2000, "Influence of Speed and Step Length During Walking on Kinetics of joints of Lower Limbs," Dept. of Physical Education, The Graduate School, Yonsei University.
(15) Lee, C.-M., Jeong, E.-H. and Freivalds, A., 2001, "Biomechanical Effects of Wearing High-heeled Shoes,"
International Journal of Industrial Ergonomics, Vol.28, No.6, pp.321~326.
(16) Kerrigan, D. C., Todd, M. K. and Riley, P. O., 1998, "Knee Osteoarthritis and High-heeled Shoes," The Lancet, Vol.351, No.5, pp.1399~1401.
(17) Gefen, A., Megido-Ravid, M., Itzchak, Y. and Arcan, M., 2002, "Analysis of Muscular Fatigue and Foot Stability During High Heeled Gait," Gait & Posture, Vol.15, No.2, pp.56~63.