분산배치된 레이저 스캐너를 이용한 사람추적방법 및 출입감시시스템에의 응용
People Tracking Method with Distributed Laser Scanner and Its Application to Entrance Monitoring System
이 재 훈1, 김 용 식2, 김 봉 근2, 오바 코타로2, 카와타 히로히코3, 오야 아키히사4, 유타 신이치4
Lee Jae Hoon1, Kim Yong Shik2, Kim Bong Keun2, Ohba Kohtaro2, Kawata Hirohiko3, Ohya Akihisa4, Yuta Shin’ich4
Abstract
Recently, people tracking technology is being required to various area including security application. This paper suggests a method to track people with multiple laser scanners to detect the waist part of human. Multi-target model and Kalman filter based estimation are employed to track the human movement. The proposed method is applied to a novel system to monitor the entrance area and to filter out the trespasser to pass through the door without identification. Experiments for various cases are performed to verify the usefulness of the developed system.
Keywords:
People Tracking, Laser Scanner, Entrance Monitoring, Security
1. 서 론1)
사람의 움직임을 감지하는 기술은 이동로봇의 안전 한 이동을 위한 충돌회피 경로계획분야, 로봇과 사람의 상호작용을 위한 휴먼-로봇 인터페이스 분야, 장애인 이나 일반인의 보행 패턴을 해석하는 재활 및 의료분 야, 공간의 상태변화를 감지하여 제어하는 빌딩관리 분 야, 실내공간의 효율적인 사용을 위해 사람들의 행동특 성을 해석하는 분야, 엘리베이터나 출입구 등의 출입을 감시하는 보안분야 등의 다양한 분야에 적용하기 위하 여 활발히 연구되고 있으며, 최근 실용화의 속도도 급 속히 증가하고 있음이 보고되고 있다[1].
사람 등의 움직이는 대상의 움직임을 감지하는 방법 으로는 카메라를 활용한 비젼기술이 일반적으로 사용 되어 왔다. 하지만, 높은 활용도와 보급율에도 불구하 고 화상처리에 의한 사람추적방법은 일반적으로 화소
Received: February 19. 2009, Reviewed: April 10, Accepted: May 22. 2009
1 일본 Ehime대학 조교수
2 일본 AIST 연구원
3 일본 Tsukuba대학 박사과정
4 일본 Tsukuba대학 교수
수에 따른 전처리 과정의 계산하중으로 인하여 고속의 계산기가 요구되며, 광량변화 등의 환경변화에 민감하 고, 카메라의 시야각이 상대적으로 넓지 않으며, 이를 극복하기 위하여 광각렌즈를 사용할 경우 왜곡이 심화 되는 등의 제약이 따르는 것으로 알려져 있다[2]. 또한, 감지하고자하는 대상물의 위치 정보가 필요한 경우에 는 카메라를 수직으로 설치하거나 복수의 카메라를 사 용하는 등의 별도의 방법이나 부가적인 계산이 필요하 게 된다.
최근 환경의 변화와 움직이는 물체를 감지하는 새로 운 방법으로 레이저 스캐너(Laser Scanner)를 활용하는 기술이 활발히 연구되고 있다[4-9]. 레이저 스캐너를 활 용한 물체감지와 추적방법은 환경의 변화에 민감하지 않으며 감지할 수 있는 각도범위가 비교적 넓고 센서 로부터 물체까지의 위치 값의 정밀도가 높은 등의 장 점이 있다[3,8,10]. 이러한 이유로 레이저 스캐너를 활용 하여 사람의 움직임을 감지하기위한 기술에 대하여 많 은 연구가 진행되어 왔다. Shulz 등은[4] 이동로봇에 부 착한 레이저 스캐너를 활용하여 샘플기반 결합확률데 이터연관필터(sample-based joint probabilistic data associa-
그림 2. 레이저 스캐너를 사용한 사람감지 그림 1. 레이저 스캐너 (URG-04LX, Hokuyo Corp.)[10]
tion filter)로 사람의 움직임을 추적하는 방법을 제안하 였다. Zhao 등은[5,7] 실내환경에 분산된 레이저센서들을 활용하여 사람의 발목부분을 스캔하고 움직임을 감지 하는 시스템을 개발하였다. 또한 Lee 등은[8,9] 이동로봇 의 충돌회피 경로계획을 위하여 이동중의 이동로봇 위 의 레이저 스캐너를 활용하여 사람의 보행모델에 기반 한 보행자 추적방법을 제안하였다. 이와같이 레이저 스 캐너를 이용한 선행연구들은 대부분 이동로봇의 네비 게이션을 목적으로 개발되어졌으며 보안분야에의 응용 이 많지 않은 실정이다.
본 논문에서는 사람의 허리 부분을 감지하는 복수의 스캐너를 활용하여 사람의 움직임을 추적하는 방법을 제안하고 건물의 출입구를 감시하는 시스템 개발에의 응용에 대하여 기술한다.
본 논문의 구성은 다음과 같다. 2장에서 레이저 스 캐너를 이용하여 사람의 움직임을 감지하는 방법을 소 개하고, 3장에서 복수의 보행자를 추적하는 알고리즘에 대해 기술한다. 4장에서는 개발된 출입감시시스템과 실 험에 대하여 소개하며 5장에서 결론을 맺는다.
2. 레이저 스캐너를 이용한 사람 감지방법 이 장에서는 레이저 스캐너 센서 데이터의 특성과 복수의 레이저 스캐너를 이용하여 보행중인 복수의 사 람을 감지하는 방법에 대하여 기술한다.
2.1 레이저 스캐너
그림 1은 본 연구에 사용된 일본 Hokuyo 사에서 개 발된 레이저 스캐너의 사진을 나타낸다. 센서의 내부에 위치하여 수직축에 부착되어 회전하는 레이저 발광부
와 수광부에 의하여 수평면을 초당 10회 스캔하여 센 서로부터 감지된 물체까지의 거리와 레이저 광선의 각 도를 출력한다. 감지하는 회전범위는 센서를 중심으로 전방 수평면의 240도 영역이며 0.36도 각도분해능을 지닌다. 감지거리는 센서의 중심으로부터 4095mm까지의 영역이며 최대감지거리의 1%의 거리분해능을 지닌다.
총 중량은 약 160g이며 크기는 50mm × 50mm × 70mm의 비교적 컴팩트한 외형을 지닌다.
2.2 레이저 스캐너를 사용한 이동물체 탐지
그림 2는 레이저 스캐너를 사용하여 환경과 물체를 감지하였을 때의 출력 데이터의 특징을 나타낸 개념도 이다. 레이저 스캐너 센서는 이동체를 감지하고자 하는 관심영역 내의 일정장소에서 일반 성인의 허리 부분을 탐지할 수 있도록 약 80cm정도의 높이에 설치되었다고 가정한다. 센서 내부의 회전축에 의해 회전하는 레이저 광선은 그림 2에 나타낸 바와 같이 센서가 설치된 높 이의 수평면을 스캔하며, 센서로부터 레이저 광선을 반 사하는 환경과 물체까지의 거리를 출력한다. 센서의 출 력 데이터는 탐지하고자 하는 이동물체 뿐 아니라 스 캔면에 존재하는 환경부까지의 거리와 각도 데이터를 포함한다. 따라서, 센서데이터로부터 탐지하고자 하는 이동물체, 즉 사람에 해당하는 부분만을 추출하여 사용 하여야 한다.
본 연구에서는 물체가 존재하지 않는 실험초기에 스 캔한 환경부 데이터와 현재의 센서데이터를 비교함으 로써 이동물체에 해당하는 데이터를 추출하는 클러스 터링(clustering) 과정을 수행하였다. 그림 2에서 환경부 데이터는 ‘o’으로, 현재의 센서데이터는 ‘x’ 기호로 표 기하였다. 그림에 나타낸 바와 같이 사람이 감지된 부
그림 3. 복수의 레이저 스캐너를 사용한 이동체 감지
그림 4. 복수의 보행자 추적 분에서 현재 센서데이터와 환경부데이터 사이의 거리
정보에 차이가 발생하므로 이동체에 관련된 부분만을 추출할 수 있다. 그러나, 사람의 허리부분을 감지할 경 우, 사람이 향한 자세와 레이저 스캐너와의 위치관계에 따라 사람의 허리부분 뿐 아니라 팔 부분 또한 이동체 로 인식된다. 팔에 해당하는 부분을 제거하기 위하여 추출된 인접 데이터의 집합인 클러스터의 크기를 기준 으로 활용하였다.
2.3 클러스터의 중심위치 계산
클러스터를 추출한 이후에 각 클러스터의 중심위치 를 계산한다. 본 연구에서는 사람의 허리부분의 단면 형태를 원형으로 가정하였다. 따라서, 원형 단면의 반 경을 r 로, 각 클러스터의 양 끝점을 각각 c p 과 1 p 로 2
정의하면 중심의 위치는 다음 식으로 구해진다.
2 2
cos( ) sin( )
p c
p c
x r
x
y r
y
α β α β
⎛ ⎞ ⎛ + ⎞
⎛ ⎞=⎜ ⎟ ⎜+ ⎟
⎜ ⎟ +
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ (1)
여기서,
α
는 양 끝점을 잇는 선분 p2p1과 전역좌 표계의 X 가 이루는 각을 나타내며, Gβ
는 두 선분1 2p
p 와 p2pc가 이루는 각을 나타낸다.
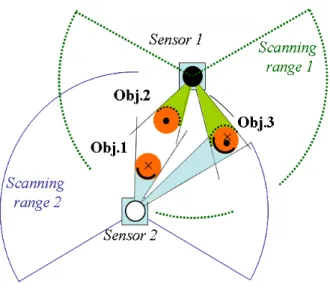
2.4 두 대의 레이저 센서를 사용한 복수 이동체 감지
레이저 센서나 카메라 등의 센서를 사용하여 복수의 이동체를 추적하는 경우, 한 이동체가 다른 이동체에의 하여 가려져서 센서에 감지되지 않는 경우가 발생한다.이러한 현상을 최소화하기 위한 방법으로 본 연구에서 는 두 대의 레이저 스캐너를 사용하였다. 복수의 센서 를 사용하는 경우, 센서와 이동체의 위치관계에 따라 둘 중 하나의 센서에 감지되거나 두 센서에 동시에 감 지되는 상황이 존재하며, 각 센서의 registration 오차 등의 이유로 동일 물체에 대한 각 센서에 대한 측정값 의 오차가 발생하기도 한다. 그 한 예로서, 그림 3에 도시된 물체 3 (Obj. 3)은 두 센서 모두에의하여 감지 되나 ‘•’과 ‘×’로 표시된 각 센서로 부터 얻어진 물체 의 중심위치 사이에는 오차가 존재한다. 이러한 오차를 줄이기 위한 방법으로 전문적인 필터링 기법을 활용하 는 연구가 있으나[11], 본 연구에서는 그 오차의 크기가 일반적인 사람의 허리단면의 반경보다 작은 경우 동일 한 물체를 감지한 것으로 가정하였다.
3. 보행자 추적 및 계수 방법
3.1 보행자 추적의 Life Cycle
그림 4는 관심영역을 두 대의 레이저 스캐너로 감시 하는 경우에 있어 추적되는 보행자의 Life Cycle을 나 타낸다. 그림에서 보행자의 이동궤적은 실선화살표로 표시되었다.
스캔영역에 들어온 보행자는(출현 appearance) 센서 에 의하여 지속적으로 감지되어 추적되며(추적 tracking), 상황에 따라 다른 보행자에 의해 가려져서 일시적으로 센서에 감지되지 못하는 상태에 있기도 하며(가려짐 occlusion), 최종적으로 스캔영역 밖으로 벗어남(소멸 dis- appearance)으로 센서의 감시에서 사라지게 된다.
3.2 보행자 추적모델
환경에 설치된 레이저 스캐너에 의하여 감지된 보행 자의 허리부분의 움직임은 다음 식과 같이 평면에서 등속으로 이동하는 물체로 모델되었다. 이하에 기술하 는 운동 및 관측 모델은 보행자의 상태를 추정하는 칼 만필터에 사용된다. 추적하는 이동체의 상태벡터는 보 행자의 중심위치와 속도로 다음과 같이 나타내며,
( )
t t t t t T
x y x y
x = p p v v . (2)
여기서, 위첨자 t 는 스캔영역 내의 보행자의 번호를 나타낸다.
이동체의 운동모델은 다음 식으로 나타내어지며,
( 1) ( ) ( 1)
t t t t
x k + = F x k + w k +
, (3)여기서,
w
는 모델링 오차를 나타내며, k는 시간을나 타낸다. 상태변이행렬은1 0 0
0 1 0 0 0 1 0 0 0 0 1
t
T F T
⎡ Δ ⎤
⎢ Δ ⎥
⎢ ⎥
=⎢ ⎥
⎢ ⎥
⎢ ⎥
⎣ ⎦
로 주어진다.
측정 관계식은 다음과 같이 표현되며,
( 1) ( 1) ( 1)
t t t t
z k+ =H x k+ +
δ
k+ , (5)여기서,
δ
는 측정오차를 나타내며, 관측행렬은1 0 0 0 0 1 0 0
Ht ⎡ ⎤
= ⎢ ⎥
⎣ ⎦ (6)
로 정의된다.
3.3 보행자 추적 및 계수 방법
보행자를 추적하는 과정은 다음과 같으며, 전체 과 정이 레이저 스캐너의 스캔 주기와 동일한 주기로 반 복된다.
3.3.1
데이터 클러스터링
(Data clustering)먼저, 각 레이저 스캐너로 부터 주어진 측정 데이터 로부터 보행자에 해당하는 부분을 추출한다. 앞서 기술 한 바와 같이 환경부 데이터와 현재 데이터를 비교함 으로써 보행자 부분을 분리하며, 크기 정보를 기반으로 허리부분의 클러스터 만을 추출한다.
3.3.2
중심위치 계산
기하학적 정보를 바탕으로 2.3절에 설명한 방법을 사용하여 추출된 클러스터의 중심위치를 계산한다.
3.3.3
복수 클러스터 융합
두 대의 레이저 스캐너를 사용하므로 하나의 보행자 에 대하여 두 개의 클러스터가 생성되는 경우가 발생 한다. 두 클러스터 간의 거리가 허리단면의 반경보다 작은 경우 하나의 보행자를 감지한 것으로 가정하여 두 클러스터의 중간값을 보행자의 위치로 사용한다. 결 과적으로 얻어진 클러스터의 집합은 보행자의 위치를 추정함에 있어 측정값으로 사용된다.
3.3.4
클러스터와 트랙의 결합
현재 시간의 스캐닝을 통해 얻이진 클러스터는 다음 과 같은 결합과정을 통해 이전시간까지 추적되어진 보 행자의 트랙(track)과 연결되어진다. 본 논문에서는 유 효화영역(validation region) 내에 존재하는 클러스터 중 에서 추적체의 예측위치와 클러스터 위치사이의 거리 가 최소가 되는 클러스터를 연결하는 방법을 사용하였 다. 추적체의 유효화영역은 다음식으로 정의된다[3].
) 1 ( ) 1 ( ) 1
( + 1 + +
≥
υ
′k S− kυ
kγ
(7)여기서, 이노베이션(innovation)
υ
(k+1)=zt −zˆt은 센서 측정치 z 와 상태예측치 t zˆ 사이의 위치오차를 t 나타내며, S(k+1)는 이노베이션υ
(k+1)의 공분산 행렬이다.3.3.5
새로운 트랙의 생성
현재시간의 스캔을 통하여 얻어진 클러스터들 중에 서 이전시간까지의 트랙과 연결되지 않은 클러스터는 새로운 보행자가 출현한 것으로 간주되어 새로운 트랙 으로 등록한다.
3.3.6
트랙의 업데이트
(update)추적하는 보행자의 상태는 3.2절에 기술한 추적모델 (4)
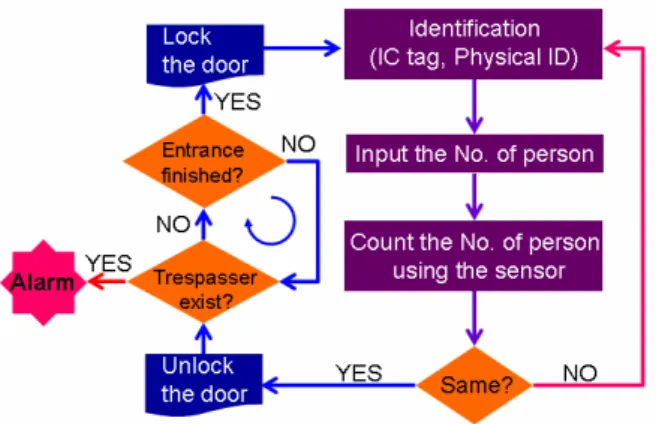
그림 6. 출입감시 시스템의 작동과정 예시
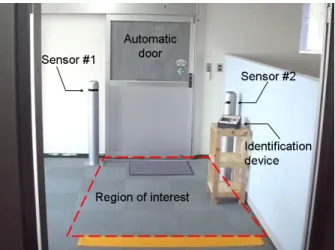
그림 5. 제안된 출입감시 시스템의 구성
과 칼만필터를 사용하여 추정된다. 다른 보행자에 의하 여 가려짐에 의해 센서에 감지되지 못한 경우, 즉 측정 치가 없는 트랙에 대하여는 이전시간의 상태를 사용한 예측값을 사용한다. 그리고, 이러한 가려짐의 상태가 일정시간 지속되는 트랙은 스캔영역으로부터 소멸되어 진 것으로 간주되어 트랙 리트트로부터 삭제하며 추적 을 중단한다.
3.3.7
관심영역의 보행자 계수
업데이트된 트랙의 리스트 중에서 관심영역내의 트 랙의 수를 계수하며, 그 영역내에 존재하는 보행자의 수로 간주되어진다. 출입구에서 사용자가 입력한 사람 의 수와 비교함으로 인증을 받지 않은 사람의 출입을 방지하는 보안용도로 사용된다.
4. 출입감시 시스템에의 응용
4.1 시스템 구성 및 작동방식
본 논문에서 제안하는 출입감시 시스템은 그림 5에 도시한 바와 같이 자동문, 생체정보인식기나 RFID카드 해독기 등과 같은 출입자 인증기기, 레이저 스캐너 및 컴퓨터 등으로 구성되어 있다. 컴퓨터는 USB 통신으로 연결된 레이저 스캐너로부터 입력받은 센서정보를 사 용하여 앞에서 기술한 방법으로 영역내의 보행자를 추 적하며 자동문을 제어하고, 인증받지 않은 사람의 출입 에 대하여 경고음을 내며, 감시상황을 저장하는 등의 전반적인 작업을 관리한다.
일반적으로 널리 사용되고 있는 보안형 출입문은 출 입자 인증기기의 인증여부에 의하여 자동문이 개폐된 다.실제로, 이러한 기존의 보안형 출입문은 인증받은 사용자가 출입하는 동안에 인증받지 않은 사람이 무단
으로 출입하는 것을 보안시스템이 방지하거나 감지하 지 못하는 단점이 있다. 많은 경우, 인증권을 지닌 사 용자들이 출입하는 동안에 인증받지 않은 사람이 무단 으로 출입하는 것을 용인하는 사회적인 관례로 인하여 현실적으로 보안이 약화되기도 한다.
하지만, 본 연구에서 제안하는 출입감시 시스템은 일반적인 보안형 출입문과 함께 레이저 스캐너를 사용 하여 출입구를 통과하는 보행자의 움직임을 추적하고 감시함으로써, 인증받는 사람 뿐 아니라 인증받지 않은 사람의 움직임도 감지할 수 있는 장점을 지닌다.
따라서, 출입감시 시스템에 의하여 인증받지 않은 사람의 움직임을 감지하고 출입에 경고나 제약을 가함 으로서 보안이 약화되는 것을 방지한다.
현장에서의 보안 출입장치의 운용은 다양한 방법이 가능하나, 그 한 예로 관심영역내의사람의 수를 비교하 는 방법을 그림 6에 나타내었다. 출입하고자 하는 사용 자는 인증장치를 통하여 인증을 받은 이후에 출입하고 자 하는 사람의 수를 입력한다. 상시 출입구 주위를 스 캔하고 있는 시스템은 관심영역내의 사람의 수와 사용 자가 입력한 수를 비교하여 동일한 경우에 문을 개방 하며, 일치하지 않으면 다시 인증을 요구한다. 인증을 거쳐 문이 개방된 이후에도 시스템은 출입구를 감시하 여 관심영역에서 인증받은 사람들을 추적하고 출입이 끝나면 문을 닫는다. 이 때, 인증받은 사람 이외의 밖으 로 부터 다른 보행자가 문에 접근하여 출입을 시도하는 경우에는 경고를 내고 안전히 문을 닫으며 중앙 통제실 에 상황을 알리는 등의 보안강화과정을 수행한다.
4.2 보행자 추적실험
제안된 방법으로 보행자의 움직임을 추적하는 실험 을 수행하였다. 그림 7에 실험장면의 연속사진(왼쪽)과 시스템의 추적상황(오른쪽)을 나타내었다. 두 대의 레
그림 7. 보행자 추적 실험
(a) 실험장면
(b) 시스템의 추적상황
그림 8. 보행자 추적방법과 RFID를 동시에 사용한 실험
이저 스캐너가 각각 전역좌표계의 원점과 (1.5m, 2.5m) 의 위치에 약 80cm의 높이로 설치되었으며, 관심영역 은 출입구 앞의 2m×2m의 영역으로 정하였다. 두 사람 이 먼저 관심영역으로 접근하여 들어온 이후에 다른 한사람이 추가로 출입구를 향하여 접근하는 것을 개발
된 시스템이 원활히 추적함을 알 수 있다.
그림 8은 RFID 카드 인증기기와 본 연구에서 제안 하는 보행자 추적방법을 함께 사용하는 경우의 실험장 면을 나타낸다. 사용자가 RFID 카드를 사용하여 인증 기기에 접근하는 동안 시스템이 사용자의 움직임을 추 적하며, 인증받는 순간 인증기기와 사용자의 위치정보 를 활용하여 추적해온 트랙에 인증코드를 부여한다. 그 림 8 (b)에 나타난 바와 같이 시스템이 트랙과 인증코 드를 성공적으로 결합함을 알 수 있다.
4.3 출입감시시스템 개발
제안된 방법을 기반으로 출입감시시스템을 개발하였 으며, 그림 9과 같이 일본의 H기업의 사무실의 출입구 에 설치되었다. 그림 10은 개발된 시스템을 운용하기 위한 소프트웨어의 작동상황을 나타낸다. 레이저 스캐 너로 부터 주어진 데이터와 추적상황을 2차원으로 표 현하는 모니터링 윈도우, 시스템 조작판, 관심영역내의 사람수를 나타내는 카운터 등으로 구성되어 있다. 수 개월에 걸친 비교적 장시간동안 시험구동을 통하여 안 정적으로 동작함을 확인할 수 있었다.
그림 9. 개발된 출입감시시스템
그림 10. 개발된 시스템의 운용을 위한 소프트웨어
5. 결 론
본 논문에서는 복수의 레이저 스캐너를 사용하여 다 수의 보행자를 추적하는 방법을 제안하였다. 추적모델 과 칼만필터를 사용하여 보행자의 위치 및 속도를 실 시간으로 추정하며, 다양한 실험을 통하여 그 효용성을 검증하였다. 제안된 알고리즘은 카메라를 사용하는 기 존의 방법에 비하여 비교적 정확한 위치정보를 얻을 수 있는 장점을 지닌다. 또한, 제안된 방법을 기반으로 개발된 출입구감시시스템은 출입구를 통과하는 사람들 의 움직임을 감시함으로써 기존의 보안형 출입문의 단 점을 보완하여 보안을 강화할 수 있음을 알 수 있다.
추후 과제로 제안된 시스템의 신뢰도를 향상시키고 보다 안정적인 운용방법의 개발과 카메라 등의 다양한 센서를 통합적으로 활용하는 방법에 대한 연구이다.
참 고 문 헌
[1] J. Watada and Z. B. Musaand, “Tracking Human Motions for Security System,” Proc. of 2008 SICE Annual Conf., pp.3344-3349.
[2] D. Gavrila, “The Visual Analysis of Human Movement: A Survey,” Computer Vision and Image Understanding, Vol. 73, No. 1, pp. 82-98, 1999.
[3] Y. Bar-Shalom, X. Li and T. Kirubarajan, “Estimation with applications to tracking and navigation,” John Wiley & Sons, INC., New York, 2001.
[4] D. Schulz, W. Burgard, D. Fox, and A.B. Cremers,
“People Tracking with a Mobile Robot using Sample-based Joint Probabilistic Data Association Filters,” Proceedings of IEEE Int. Conf. on Robotics and Automation, pp. 1665-1670, 2003.
[5] H. Zhao and R. Shibasaki, “A novel system for tracking pedestrians using multiple single-row laser -range scanners,” IEEE Transactions on Systems, Man, and Cybernetics-Part A, Vol. 35, No. 2, 2005.
[6] H. Kawata, W. Santosh, T. Mori, A. Ohya and S.
Yuta, “Development of ultra-small lightweight optical range sensor system,” Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.3277-3282, 2005.
[7] J. Cui, H. Zha, H. Zhao and R. Shibasaki, “Tracking Multiple People using Laser and Vision,” Proceedings of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp.1301-1306, 2005.
[8] J. H. Lee, T. Tsubouchi, K. Yamamoto and S.
Egawa, “People tracking using a robot in motion with Laser Range Finder,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2006.
[9] J. H. Lee, B.K. Kim and K. Ohba, “Tracking and Counting Humans with Multiple Laser Range Scanners,” The 3rd International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 2007), pp.252-255, 2006.
[10] Hokuyo Corporation, http://www.hokuyo-aut.co.jp [11] 김용식, 이재훈, 도현민, 김봉근, 타니카와 타미오,
오바 코타로, 이강, 윤석헌, “분산된 센서들의 Registration 오차를 줄이기 위한 새로운 필터링 방 법,” 로봇공학회 논문지 제3권 3호, pp. 176-185, 2008.
이 재 훈
1996 B.S. in Mechanical and Control Eng., Korea Universityof Technology and Education
1998 M.S. degree in Control and Instrumentation Eng., Hanyang University
2003 Ph.D. degree in Electronic, Electrical, and Control and Instrumentation Eng., Hanyang University 2009~현재 Assistant Professor, Department of
Mechanical Engineering, Ehime University, Japan 관심분야 : Object tracking with sensor network,
navigation of mobile robots, parallel mechanisms, bio-mimetic systems
김 용 식
1994 B.S. in Mechanical Eng., Dong-A University 2000 M.S. degree in Mechanical
and Intelligent Systems Engineering of Pusan National University
2005 Ph.D. degree in Mechanical and Intelligent Systems Engineering of Pusan National University
2007~현재 Researcher, Ubiquitous Functions Research Group, National Institute of Advanced Industrial Science and Technology, Japan
관심분야 : State estimation, target tracking, multi -sensor fusion, localization, data association, and data integration, sensor registration, bias estimation
김 봉 근
1994 B.S. degree in Mechanical and Production Eng. from Pusan National University 1996 M.S. degree in Mechanical
Eng. from Pohang Univ. of Science and Technology 2001 Ph.D. degree in Mechanical Eng. from Pohang
Univ. of Science and Technology
2005~현재 Research Engineer, Service Roboics Research Group, National Institute of Advanced Industrial Science and Technology
관심분야 : Control theory, robot middleware, ambient intelligence, ubiquitous robotics, and sensor network
Kohtaro Ohba
1986 B.Eng. in MechanicalEngineering of Tohoku University
1988 M.Eng. in Mechanical Engineering of Tohoku University
1991 Ph.D. in Mechanical Engineering of Tohoku University
2009~현재 Group Leader of Dependable Systems Research Group, and deputy director of Intelligent Systems Institute, The National Institute of Advanced Industrial Science and Technology, Japan
관심분야 : Distributed knowledge robot control, micro VR camera system, tele-operation, object recognition, human interface, visualization
Hirohiko Kawata
2002 B. Eng. in Agriculture ofKyushu University 2004 M.Eng. in Agriculture of
Kyushu University
2007~현재 Ph. D. Candidate, Graduate School of Systems and Information Engineering, University of Tsukuba, Japan
관심분야 : Applications of SOKUIKI sensor ‘URG’ to intelligent robot
Akihisa Ohya
1987 B. Eng. in Electrical Engineering of Keio University
1989 M. Eng. in Electrical Engineering of Keio University
1992 Ph.D. in Electrical Engineering of Keio University 1992~현재 Associate Professor, Department of
Computer Science, Graduate School of Systems and Information Engineering, University of Tsukuba, Japan
관심분야 : Service robots for daily life, real-world sensory information processing, computational intelligence and its applications to mobile robots
Yuta Shin’ichi
1970 B. Eng. in ElectricalEngineering of Keio University
1972 M. Eng. in Electrical Engin- eering of Keio University 1975 Ph.D. in Electrical Engineering of Keio University
1978~현재 Professor, Graduate School of Systems and Information Engineering, and Director of the Industrial Liaison and Cooperative Research Center, University of Tsukuba, Japan
관심분야 : Autonomous mobile robot, application of robot technology to maintenance task, architecture and software for intelligent robot
![그림 2. 레이저 스캐너를 사용한 사람감지 그림 1. 레이저 스캐너 (URG-04LX, Hokuyo Corp.)[10]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5337509.393268/2.892.465.793.798.1053/그림-레이저-스캐너를-사용한-사람감지-레이저-스캐너-hokuyo.webp)