Construction of 3D Spatial Information of Vertical Structure by Combining UAS and Terrestrial LiDAR
10
0
0
전체 글
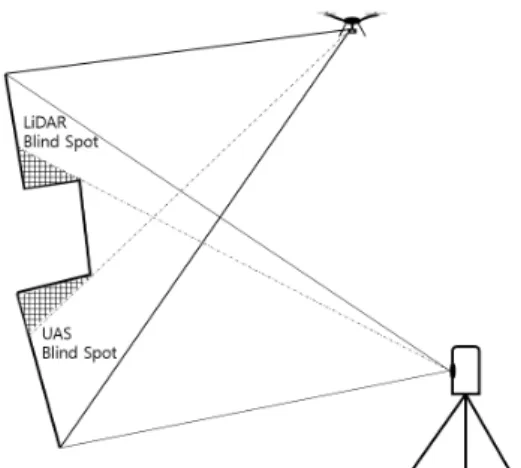
(2) 강준오 · 이용창. 1. 서론 급속한 사회발전에 따른 폭발적인 자료의 증가는 데이터베이스 유지관리, 갱신 등의 다양한 사회적 부 가비용을 만들어 내고 있다. 특히, 국토 및 도시의 효 율적인 관리를 위해 싱가폴의 경우 디지털트윈 기반 의 3차원 가상도시 및 3차원 GIS 시스템, 항공사진측 량, 항공레이저측량 등과 같은 측량기법을 이용하여 지형·지물의 3차원 공간정보를 구축하고 있다. 기 구 축된 지형공간정보는 변화발생시 신속하게 갱신하여 관련 서비스의 질적 향상과 그 신뢰도를 향상시켜야. Figure 1. Blind spots of UAS and terrestrial LiDAR. 한다. 다만, 현행 3차원 공간정보 데이터를 획득하기 위한 항공측량 시스템은 많은 경비와 전문 인력이 투. 영걸·이현직 2017). 다만, 다양한 환경적 요인에 의해. 입된다는 점에서 일반 중·소 규모의 현장에는 갱신 기. 수직 구조물 촬영 및 스캔 시 거리의 제한이 발생, 데. 간의 편차, 데이터 수집과 처리의 효율성 면에서 토털. 이터 획득에 난항이 존재하며 댐, 옹벽, 공사현장의 절. 스테이션, GNSS 및 지상 레이저 스캐너(지상 LiDAR). 개지 등 수직 구조물의 정밀 3차원 재현은 요철로 인. 가 주로 사용되었다. 최근, 무인항공기에 다양한 센서. 해 지상 레이저 스캐너 및 UAS 영상촬영 각 방법 모두. 를 연계한 시스템(UAS: Unmaned Aerial System)의. 사각지대가 발생, 구조물의 3차원 재현을 통한 공간정. 효용성이 입증되고 국토지리정보원의 무인비행장치. 보 구축에서 사각지대로 인한 데이터 공백을 보완할. 이용 공공측량 작업지침이 제정(무인비행장치 이용. 필요가 있다.. 공공측량 작업지침, 고시 제2018-1075호, 2018.3.30.). 본 연구는 UAS 영상촬영을 통한 SfM기반 영상해석. 되면서 일반 현장에서도 고 품질의 최신 공간정보를. 및 지상 LiDAR 시스템중 하나인 레이저 스캐너로 수. 획득·활용할 수 있게 되었다(NGII 2018). 특히, 전통. 직 구조물의 3차원 공간정보를 구축, 2가지 방법의 3. 적인 사진측량(Photogrammetry)과 컴퓨터 영상해석. 차원 재현 정확도, 완성도 및 작업효율을 검토하고,. 기술(CV, Computer Vision)의 발전과 조합해석으로. Figure 1과 같은 수직구조물에 대한 각 방법의 사각지. SfM (Structure from Motion) 조정(Collins 2007)기. 대를 보완하기 위해 두 방법으로 생성된 포인트 클라. 반 3D 재현 모델링을 위한 다양한 영상해석 툴이 발표. 우드(Point Clouds)를 조합, 상호 보완하여 수직 구조. 되고 있다. 최근 관심이 높아지고 있는 ‘스마트 건. 물의 3차원 공간정보 구축을 위한 정확도 및 재현의. 설’(Smart Construction)의 일환으로 공간정보가 주. 완성도를 확보하는 것이다. 이를 위해 실험 대상으로. 목받고 있으며 조정관(2011)은 지상 LiDAR, 항공. 요철이 심한 ○○지역 ‘인공암벽’을 선정하였다. 특히,. LiDAR, MMS, 지상사진측량으로 건물모형을 생성하. UAS를 활용한 SfM 영상해석 기반 수직 구조물의 실. 여 정확도를 평가한 바 있다(조정관 2011). 이동국 외. 세계 정밀 3차원 재현을 위해서는 지표면 대상 해석. (2017)는 UAS영상과 레이저 스캐너의 정확도 비교를. (‘지표면 기준점’)과는 달리 ‘수직면 용 기준점’(VCP,. 통해 UAS가 공간정보 구축에 레이저 스캐너를 대체. Vertical Control Point)과 점검점(Check Point)이 필. 할 수단으로서 그 효용성을 입증한 바 있다(이동국·유. 요하다.. 58. 「지적과 국토정보」 제49권 제2호. 2019.
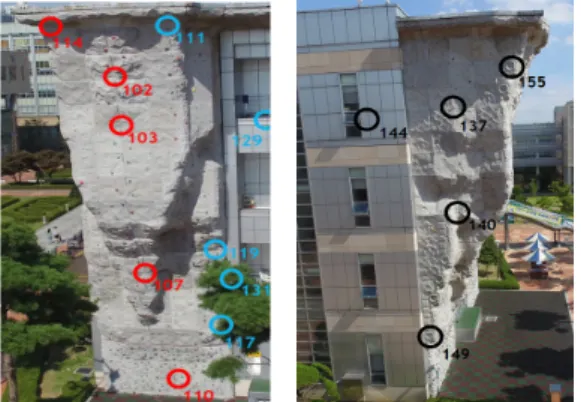
(3) UAS와 지상 LiDAR 조합에 의한 수직 구조물의 3차원 공간정보 구축. 수직 기준점 및 점검점은 토탈 스테이션(Total Station)을 통해 획득, 기계점은 Network-RTK 측량 으로 획득하였다. 토탈 스테이션 후시관측으로 수평 오차와 수직오차가 1cm 이내인 위치를 기계점으로 선정, 설치하여 획득한 수직 기준점을 통해 UAS기반 영상해석으로 구조물의 3D 모델을 구현하였다. 또한, 기계점에 레이저 스캐너를 설치, LiDAR 기반 포인트 클라우드 데이터를 획득하였다.. Figure 2. Analysis of SfM interpreted image by CRP Source: Tiganik 2016. 토탈 스테이션으로 획득된 점검점을 기준으로 UAS 영상해석 모델 및 지상 LiDAR 점군정보의 정확도를. 요소에 대한 정보 없이도 카메라 좌표계 공간 안에서. 검토하고 사각지대를 검출 및 효율성을 검토하였다.. 대상물의 3차원 재현이 가능하게 된다.. 특히, 2가지 점군정보를 조합 해석하여 나타난 재현모. Figure 2와 같이 측정용 및 비측정용 카메라를 활용. 델의 측위 정확도 및 사각지대 보완 여부를 비교·고찰. 하여 피사체를 충분한 중복도로 촬영하고, 영상 내 특. 하였다.. 징점을 추출, SfM 기반 정렬·정합 과정(E, F 행렬식의 SVD 해석)을 반복하면서 상호표정 및 내부표정 요소. 2. 영상해석 이론. 를 초기입력값 없이 독립적으로 산출, 지상기준점 또 는 수직기준점의 절대좌표를 활용한 실세계 3차원. UAS 기반 사진측량에 의한 지형도 제작 작업의 경. 모델을 재현한다(Collins 2007; Lee 2017).. 우 대상지에 대한 정보와 조정을 구역화하여 번들 (Bundle) 방식으로 조정하는 방법이 효율적이다. 번. 3. 연구내용. 들조정 기법은 공선조건, 공면조건, 또는 DLT(Direct Linear Transformation method)를 사용한다. 특히,. 3.1. 3D 모델 재현. 전통적인 사진측량 분야에서 정의된 공면조건과 CV 분야에서 발전된 공액조건은 유사한 특징이 있는 반. 연구대상 수직 구조물 ‘인공암벽’은 높이 18m, 좌우. 면, 정확도, 활용도 면에서 차별화되어 발전해왔지만,. 폭 6m, 돌출길이 6m 규모이다. 특히, 수직면 영상 해. 현재 상호보완을 통해 향상 발전되고 있다(Wolf and. 석을 위한 ‘수직 기준점(VCP)’으로 Figure 3와 같이. Dewitt 2000).. 인공암벽 판넬 접합용 볼트 머리의 6각 원형부를 선점. SfM 기술은 CV 분야 영상해석의 근간기술로 촬영. 하였다.. 점의 좌표와 회전요소가 E(Essential 행렬, 내부표정. 기준점과 점검점의 실세계 좌표는 암벽 주변에 기. 요소 기지) 또는 F(Fundamental 행렬, 내부표정요소. 계점을 Network RTK 측량을 통해 설정하고 토탈 스. 미지) 행렬 요소로 구성된 선형식을 특이값 분해. 테이션을 활용하여 무타겟으로 한 포인트 당 10회 측. (SVD) 해석하여 유일 해를 구할 수 있어 촬영점 위치. 정, 평균을 내어 Table 1과 같이 기준점 4개 및 점검점. 및 회전요소의 초기값 정보를 필요로 하지 않는다. 따. 15개의 3차원 좌표를 산출하였다.. 라서, CV분야의 영상해석과정에서 비측정용 카메라. 아울러 UAS(DJI사, 팬텀3 professional)를 활용하. (Non-Metric Camera)의 촬영점과 카메라 내부표정. 여 인공암벽에서 3∼5m 이격 거리를 유지하면서 수동 Journal of Cadastre & Land InformatiX Vol.49 No.2 (2019). 59.
(4) 강준오 · 이용창. Table 2. SX10 specifications Division Each precision Performance. SX10 1" Prism : 1mm + 1.5ppm. Accuracy. Division. SX10. Band Technology Scanning Scan method. NonPoint target : spacing 2mm + Scanning (mm) 1.5ppm. Time of flight 6.25, 12.5, 25 or 50. Resol ution. 5MP. Measuring range(m). 360~ 600. Zoom. 84x. Distance deviation (mm). 1.5. Camera. Figure 3. Artificial rock wall and VCP location Table 1. VCP and check points Station. VCP. X. Y. Z. 101. 167349.142. 530594.621. 25.334. 104. 167349.941. 530595.641. 19.329. 113. 167351.547. 530594.463. 21.322. 116. 60. 167348.341. 530596.861. 21.333. 102. 167349.545. 530595.137. 23.331. 103. 167349.939. 530595.669. 21.330. 107. 167351.166. 530597.241. 14.344. 110. 167352.917. 530598.424. 8.3490. 114. 167347.751. 530596.095. 25.327. 111. 167350.935. 530593.664. 25.307. 117. 167354.310. 530596.942. 11.340. 119. 167353.891. 530596.409. 15.332. 129. 167355.713. 530595.690. 21.312. 으로 3D모델을 재현하였다. 또한, Table 2과 같은 지. 131. 167354.590. 530596.020. 13.813. 상 레이저 스캐너(LiDAR, Trimble사의 SX10)을 활. 137. 167349.178. 530599.139. 22.291. 용, Figure 4와 같이 인공암벽과 5∼10m 이격하면서. 140. 167349.705. 530598.715. 17.298. 획득한 측점 군 자료를 활용하여 3D 모델을 재현하. 144. 167351.179. 530602.464. 21.758. 149. 167350.290. 530600.565. 11.044. 155. 167347.917. 530596.942. 24.034. 「지적과 국토정보」 제49권 제2호. 2019. Figure 4. SX10 Laser scanner & scanning to artifical rockwall. 비행하여 총 591장의 영상을 취득, SfM기반 영상해석. 였다..
(5) UAS와 지상 LiDAR 조합에 의한 수직 구조물의 3차원 공간정보 구축. Table 3. Checkpoints error and MAE and RMSE of 3D models(unit: m) UAS. Figure 5. Check points location. 3.2. 비교·분석 3.2.1. 영상해석 및 지상 LiDAR 비교 재현된 모델의 3차원 측위정확도를 고찰하기 위해 Figure 5와 같이 정면에 5개소, 좌·우측면에 5개소씩 총 15개소의 점검점을 설정하고 토탈스테이션으로 측 정한 15개의 점검점을 기준으로 UAS기반 SfM 영상 해석, 지상 LiDAR 기반 3D 모델 및 조합모델의 측위 정확도를 비교·검토하였다. Table 3은 토탈 스테이션의 점검점을 기준으로 UAS 영상해석 및 지상 LiDAR의 3차원 방향성분 오 차, 평균절대오차(MAE, Mean Absolute Error) 및 평 균제곱근오차(RMSE, Root Mean Square Error)를 정 리한 것이다. UAS기반 SfM 영상해석의 절대편차평균은 X축 0.006m, Y축 0.012m, Z축 0.015m로 나타났고 지상 LiDAR는 X축 0.007m, Y축 0.007m, Z축 0.038m로 Z 축 오차가 비교적 높게 나타났다. 평균제곱근편차 또 한 X축 0.011m, Y축 0.015m, Z축 0.022m 와 X축. Check points 102 103 107 110 114 111 117 119 129 131 137 140 144 149 155 MAE RMSE. X. Y. Z. -0.005 -0.001 +0.006 +0.007 +0.001 -0.005 +0.010 +0.011 +0.013 +0.010 -0.002 -0.005 -0.001 -0.010 -0.003 0.006 0.011. -0.003 -0.001 +0.001 +0.004 -0.005 -0.006 +0.012 -0.001 +0.000 +0.000 +0.029 +0.025 +0.024 +0.025 +0.022 0.012 0.015. -0.009 +0.000 -0.006 -0.001 -0.003 -0.003 -0.010 +0.002 +0.002 -0.007 -0.039 -0.032 -0.042 -0.036 -0.036 0.015 0.022. X. Y. Z. +0.001 +0.010 +0.016 -0.001 +0.001 -0.015 +0.006 +0.001 +0.000 +0.012 -0.002 +0.014 +0.007 +0.009 +0.019 0.007 0.010. +0.004 -0.006 -0.005 +0.000 +0.001 +0.014 +0.001 +0.006 -0.008 +0.000 -0.027 +0.005 -0.010 +0.003 +0.005 0.007 0.009. +0.065 +0.039 +0.056 +0.044 +0.056 +0.032 +0.048 +0.045 +0.058 +0.019 -0.005 +0.030 -0.003 +0.033 +0.047 0.038 0.043. LiDAR Check points 102 103 107 110 114 111 117 119 129 131 137 140 144 149 155 MAE RMSE. 0.010m, Y축 0.009m, Z축 0.043m 로 X,Y는 지상 LiDAR가 양호하지만 Z축 오차가 비교적 높게 나타났. 것으로 사료된다. 또한, 점검점으로 활용된 판넬 접합. 다. UAS 영상해석의 포인트 수는 213,133,584점, 지. 용 볼트가 오목한 지점에 있어 점검점 인근 포인트가. 상 LiDAR의 포인트 수는 10,559,660점으로 UAS의. 상하 이격이 발생, 포인트 밀집도가 UAS에 비해 상대. 포인트 밀집도가 높아 상대적으로 양호하게 나타난. 적으로 낮게 나타났다. 지상 LiDAR의 Z축 정확도가 Journal of Cadastre & Land InformatiX Vol.49 No.2 (2019). 61.
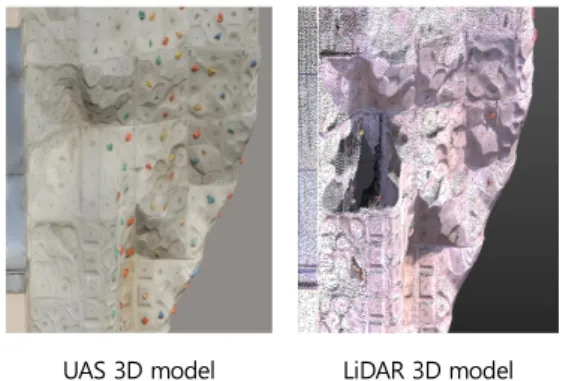
(6) 강준오 · 이용창. 또한 UAS와 지상 LiDAR에 의한 인공암벽의 3D 재 현상태를 고찰한 결과 Figure 6과 같이 좌측상부 함 몰부분에서 두 기법 간 가장 큰 재현편차가 발생하였 다. UAS 영상해석은 다양한 촬영방향에서 대상물을 촬영하여 사각지대가 발생하지 않았지만 지상 LiDAR 의 경우, 측정범위 밖의 굴곡부분에 대한 3D 재현에 한계가 있음을 확인하였다. UAS 3D model. 다만, 다른 대상을 예시로 Figure 7과 같이 UAS의. LiDAR 3D model. 돌출 좌측 하단부 및 LiDAR의 돌출 우측 상부에 사각. Figure 6. Completion of artificial rock wall depression part. 지대가 요철에 의해 발생할 수 있다. Table 4는 본 연구에서 수행한 인공암벽 수직구조물. 상대적으로 낮은 이유는 레이저 스캐너를 구조물과. 대상, UAS기반 영상해석방법과 지상 LiDAR 스캐닝 방. 인접한 지역에 설치하여 주사각과 스캔거리 제한에. 법 간의 요구된 작업시간, 2018년 기준 H/W 및 S/W. 의해 높은 위치의 점검점 좌표 오차가 크게 나타난 것. 판매 가격에 의한 추산 비용 및 작업자의 최소인원 별. 으로 사료된다.. 항목에 대한 효율성을 비교 고찰하여 정리한 것이다.. UAS 3D model. LiDAR 3D model. Figure 7. Example blind spots of UAS 3D model and LiDAR from radial angle Source: Kang and Lee 2018. Table 4. Image analysis and laser scanner work efficiency Division Work Time(W). 62. UAS UAS. Total Station. 0.5. LiDAR S/W. Total. H/W. S/W. Total. 1. 4. 5.5. 2. 0.5. 2.5. 34,663. 79,508. 5,940. 85,448. 1. 1. 1. 1. Cost(USD). 1,570. 7,637. 25,456 or 2,800 (Education). Worker(person). 1. 1. 1. 「지적과 국토정보」 제49권 제2호. 2019.
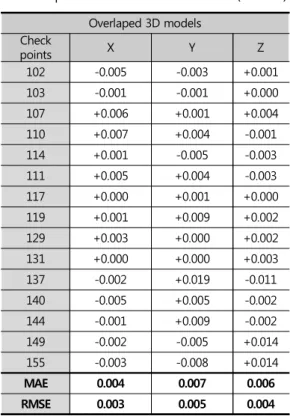
(7) UAS와 지상 LiDAR 조합에 의한 수직 구조물의 3차원 공간정보 구축. 영상해석의 경우 약 5.5시간, 레이저 스캐너는 2.5시. 0.007m, Z축 0.006m로, 평균제곱근편차는 X축 0.003. 간의 작업시간이 소요되었다. 다만, 정밀측정을 실시. m, Y축 0.005m, Z축 0.004m 로 두 종류 측점군의 조. 한다면 두 작업 모두 더 많은 시간이 필요하게 된다.. 합 해석으로 단일 방법 대비 측위 정확도가 향상된 것. HW와 SW를 포함한 기본비용은 영상해석이 약 3만. 을 확인할 수 있다. 이는 2개 측점군의 조합으로 포인. 4663달러, 지상 LiDAR의 경우, 본 연구에서 사용된. 트 밀집도가 향상되며 기존 UAS 영상해석의 X,Y축이. SX10 기준 약 8만5448달러의 비용이 사용된다. 특히,. 지상 LiDAR 포인트에 의해 향상되고, 상하 이격이 발. 영상해석은 데이터 획득에 필요한 하드웨어의 비용이. 생한 점검점에 포인트 밀집도가 증가하여 Z축 좌표가. 저렴한 반면 소프트웨어의 가격이 높다. 반면, 지상. 보완되어 나타난 것으로 사료된다.. LiDAR에 의한 레이저 스캐닝 작업은 하드웨어의 가. 또한, Figure 9와 같이 지상 LiDAR에서 재현이 불. 격이 비교적 매우 높으며 소프트웨어의 경우 저렴한. 가능했던 구조물 상부의 함몰부분을 보완, 3D 모델로. 것으로 검토되었다. 또한, 두 방법 모두 작업자 한명이. 재현할 수 있었다. 따라서, 댐, 옹벽, 건설공사의 사면. 운용 가능하다. 다만, 촬영 및 스캔 대상물의 위치 및. 등 다양한 수직 구조물의 3D 모델 재현, 변위량 검측. 주변 지형에 따라 레이저 스캐너의 노동력이 매우 높. 등의 응용 분야에 UAS와 지상 LiDAR 기술을 조합·해. 게 변경될 수도 있을 것으로 판단된다.. 석할 경우, 수직구조물의 안전진단 및 유지보수 관리 에 효율적인 활용이 기대된다.. 3.2.2. UAS와 LiDAR 측점군의 조합 UAS 및 지상 LiDAR의 촬영각에 의한 사각지대가 발생하여 3D모델 구현에 어려움이 있다. 이를 보완하. Table 5. Checkpoints error and MAE and RMSE of overlaped 3D models (unit: m) Overlaped 3D models. 기 위해 두 방법의 측점군 자료를 Trimble Realworks S/W를 활용, 포인트 속성 좌표기반 정합으로 Figure 8과 같이 조합하였다.. Check points 102. X. Y. Z. -0.005. -0.003. +0.001. Table 5은 Realworks S/W에서 조합된 점군자료를. 103. -0.001. -0.001. +0.000. Context Capture S/W를 활용해 메쉬를 생성한 후 획. 107. +0.006. +0.001. +0.004. 110. +0.007. +0.004. -0.001. 114. +0.001. -0.005. -0.003. 111. +0.005. +0.004. -0.003. 117. +0.000. +0.001. +0.000. 119. +0.001. +0.009. +0.002. 129. +0.003. +0.000. +0.002. 131. +0.000. +0.000. +0.003. 137. -0.002. +0.019. -0.011. 140. -0.005. +0.005. -0.002. 144. -0.001. +0.009. -0.002. 149. -0.002. -0.005. +0.014. 득한 3D 모델의 방향성분 오차, 절대편차평균 및 평균 제곱근편차이다. 절대편차평균은 X축 0.004m, Y축. Figure 8. Two kinds of overlaped point clouds. 155. -0.003. -0.008. +0.014. MAE. 0.004. 0.007. 0.006. RMSE. 0.003. 0.005. 0.004. Journal of Cadastre & Land InformatiX Vol.49 No.2 (2019). 63.
(8) 강준오 · 이용창. Overlaped point clouds. Overlaped 3D model meshes. Figure 9. Complementary blind spot. 4. 결론. 밀 3D 재현의 공간정보 구축은 물론 지각변동, 시계열 측정을 통한 변위 측정, 안전진단 및 유지보수 관리에. 수직구조물을 대상으로 UAS기반 영상해석과 지상 LiDAR 레이저 스캐닝 방법에 의한 3차원 공간정보를 구축하고 조합 해석하여 측위 정확도와 완성도 및 작 업의 효율성을 종합적으로 비교·고찰한 결과, 다음의 결론을 얻었다. 첫째, 수직구조물의 3D 재현의 측위 정확도는 수직. 효율적인 활용이 기대된다. 향후, 고 해상 동영상과 측점 군 조합 모델링 연구로 부터 정확도와 재현도가 향상된 실감 공간정보구축 및 작업의 효율화 방안을 연구할 계획이다.. 참고문헌. 면 기준점(VCP)를 활용한 UAS 영상해석방법이 지상. References. LiDAR 스캐닝 방법에 비해 Z축은 양호한 것으로 검토. 국토지리정보원. 2018. 무인비행장치 이용 공공 측량. 되었다. X,Y축은 지상 LiDAR가 유리하며 조합 해석할. 작업지침 [인터넷]. [https://www.ngii.go.kr/k. 경우 측위 정밀도가 두 데이터의 상호 보완으로 향상. or/board/view.do?sq=54859&board_code=la. 되었다.. winfo&search=eyJzcmNoS2V5IjoiQUJDRSIsIn. 둘째, UAS 영상해석과 지상 LiDAR 방법의 두 가지. NyY2hWYWx1ZSI6IiIsInNyY2hDYXRlIjoiIiwi. 측점군을 조합해석한 경우, 지상 LiDAR의 스캐닝 각. Ym9hcmRfY29kZSI6Imxhd2luZm8iLCJjdXJyZ. 이 제한되는 수직 구조물 상부 함몰 부위 사각지대의. W50UGFnZSI6IjUiLCJzcSI6IiJ9¤tPage=. 원활한 재현과 측점군 밀도의 향상 등으로 실물대비,. 5&srchKey=ABCE&srchCate=&srchValue=].. 단일방법에 비해 양호한 3D 재현기반의 공간정보를. 2019년 5월 21일 검색.. 구축할 수 있었다. 특히, UAS 및 지상 LiDAR 각 사각. NGII. 2018. Establishment of Public Survey Work. 지대의 상호보완이 가능하여 데이터의 공백보완에 활. Instructions Using Unmanned Aerial Vehicle. 용이 기대된다.. [internet]. [https://www.ngii.go.kr/kor/board/. 셋째, 댐, 옹벽, 절개지 등 수직 구조물 등을 대상으. view.do?sq=54859&board_code=lawinfo&sear. 로 UAS와 지상 LiDAR의 조합 해석을 활용할 경우, 정. ch=eyJzcmNoS2V5IjoiQUJDRSIsInNyY2hWY. 64. 「지적과 국토정보」 제49권 제2호. 2019.
(9) UAS와 지상 LiDAR 조합에 의한 수직 구조물의 3차원 공간정보 구축. Wx1ZSI6IiIsInNyY2hDYXRlIjoiIiwiYm9hcmRf. 간자료 융합 연구. 박사학위논문. 목포대학교.. Y29kZSI6Imxhd2luZm8iLCJjdXJyZW50UGFn. Jo JG. 2011. A Study on the Spatial Data Convergence. ZSI6IjUiLCJzcSI6IiJ9¤tPage=5&srchKe. for the Establishment of the Building Modeling. y=ABCE&srchCate=&srchValue=]. Last acces-. of 3D Cadastre[Thesis]. Mokpo National Uni-. sed 21 May 2019.. versity.. 강준오. 2018. 기준점 선정에 따른 UAS 영상기반 인. Bently. 2019. Context Capture master [Internet].. 공암벽의 3차원 모델링 정확도 비교. 석사학위논. [https://www.bentley.com/en/products/prod. 문. 인천대학교.. uct-line/reality-modeling-software/contextc. Kang JO. 2018. Comparison of Accuracy of. apture-center]. Last accessed 20 Apr 2019.. Tridimensional Modeling in Reconstruction of. Collins RT. 2007. CSE486 Computer Vision Ι. UAS Image-based Artificial Climbing Structure. [Internet]. [http://www.cse.psu.edu/~rtc12/. by Selection of Control Points[Thesis]. Incheon. CSE486]. Last accessed 18 May 2019.. National University.. Westoby MJ, Brasington J, Glasser NF, Hambrey. 강준오, 김달주, 한웅지, 이용창. 2018. 지상 LiDAR 및. MJ, Reynolds JM. 2012. ‘Structure-from-. UAS 기반 퇴적암벽의 3D모델 구현. 대한공간정. Motion’ photogrammetry:A low-cost, effec-. 보학회 학술대회. 339-340.. tive tool for geoscience applications. Geomor-. Kang JO, Kim DJ, Han WJ, Lee YC. 2018. Imple-. phology . 179:300–314.. menting 3D Model of Sedimentary Rock Wall. Tiganik S. 2016. Rough estimation of interior. Based on Ground LiDAR and UAS. Conference. dimensions using structure from motion. of Korea Institute of Korean. 339-340.. techniques.. 이동국, 유영걸, 이현직. 2017. 회전익 드론 및 3D 스. Trimble. 2019. SX10 [Internet]. [https://geospatial.. 캐너를 통한 모델링 성과의 비교. 2017 한국측량. trimble.com/SX10_stories]. Last accessed 20. 학회 학술대회자료집. 184-186.. Apr 2019.. Lee DG, Yu YG, Lee HJ. 2017. Comparison of. Wolf P, Dewitt B. 2000. Elements of Photogram-. Modeling Product using Rotary-wing Drone. metry with application in GIS. Portland:. and 3D Scanner. Conference of Korea Institute. McGraw-Hill.. of Korean. 184-186. 이용창. 2017. UAS 영상기반 공간정보해석. 인천대학 교: 도서출판부. Lee YC. 2017. UAS – based spatial information inter-. 2019년 10월 02일 원고접수(Received). pretation. Incheon National University: Book. 2019년 10월 23일 1차심사(1st Reviewed). Publishing.. 2019년 11월 13일 2차심사(2st Reviewed). 조정관. 2011. 3차원지적의 건물모형 구축을 위한 공. 2019년 12월 07일 게재확정(Accepted). Journal of Cadastre & Land InformatiX Vol.49 No.2 (2019). 65.
(10) 강준오 · 이용창. 초록 최근 스마트 시티에 의한 공간정보 제작의 일환으로 역설계를 위한 구조물의 3차원 재현이 주목받 고 있다. 특히, 구조물 3차원 재현에 지상 LiDAR가 주로 사용되며 UAS에 의한 3차원 재현 연구가 활 발히 진행되고 있다. 다만, 두 기술 모두 촬영각에 의한 사각지대가 발생한다. 본 연구는 수직구조물을 대상으로 UAS를 활용한 SfM기반 영상해석 기술을 통해 구현된 3D 모델과 지상 LiDAR 기반의 레이저 스캐닝에 의한 3D 모델간의 재현성 및 효용성을 검토하고 사각지대 보완을 위해 2가지 3D 모델을 조 합 검토한다. 이를 위해 인공암벽을 대상으로 UAS 기반 영상을 취득하고 GNSS 장비와 토탈 스테이 션을 통해 수직면 기준점(VCP) 및 점검점을 설정, SfM 기반 영상해석 기술을 활용하여 구조물의 3D 모델을 재현한다. 또한, 지상 LiDAR 스캐닝을 통해 구조물의 3D 측점 군을 취득하고 점검점을 기준으 로 재현의 정확도와 3D 모델의 완성도를 UAS 기반 영상해석결과와 비교・검토하였다. 특히, UAS 및 지상 LiDAR로부터 구축한 측점 군의 조합을 통해 정확도와 실감 재현도를 확인하였다. 연구결과, 정 확도 및 3D 모델 완성도에서 UAS 기반 영상해석이 우수하였고, 두 방법의 측점 군 조합으로 정확도가 향상됨을 확인하였다. UAS 및 지상 LiDAR 레이저 스캐닝 조합방법으로 수직구조물 대상 정밀 3차원 모델의 사각지대 보완・재현이 가능하므로 공간정보 구축, 안전진단 및 유지보수 관리에 효율적인 사 용이 기대된다. 주요어 : UAS, SfM, 수직 구조물, 지상 LiDAR, 포인트 클라우드, 조합 해석. 66. 「지적과 국토정보」 제49권 제2호. 2019.
(11)
수치

+3
관련 문서
It considers the energy use of the different components that are involved in the distribution and viewing of video content: data centres and content delivery networks
After first field tests, we expect electric passenger drones or eVTOL aircraft (short for electric vertical take-off and landing) to start providing commercial mobility
1 John Owen, Justification by Faith Alone, in The Works of John Owen, ed. John Bolt, trans. Scott Clark, "Do This and Live: Christ's Active Obedience as the
Since then, many research applications of 10 Be for both terrestrial and extraterrestrial applications have been developed, which parallel the wide range
The composition, structure, and optical properties of 3d-doped CdGa 2 O 4 crystals were studied Stoichiometry of these compound semiconductors were determined
Although image retrieval method using outline and vertex of figure is used to express spatial information, search speed is relatively slow and it is
The Seventeenth-century Transition of Seoul's Spatial Structure to Functional Pragmatism, Journal of Asian Architecture and Engineering.. The Seventeenth-century Transition
• Robert Krier, Stadtsraum in Theories und Praxis (Theory and Practice of Urban Space), 1975. • Urban space is defined as 'covering all types of space between buildings and
