< >
< < > >
< 解說 解說 解說 解說 >
의 현재와 미래 의 현재와 미래 의 현재와 미래 의 현재와 미래 RNAV
RNAV RNAV RNAV
The present and future of RNAV The present and future of RNAV The present and future of RNAV The present and future of RNAV
김필수 김필수 김필수
김필수
****,,,, 신대원 신대원 신대원 신대원
****,,,,
The present and future of RNAV The present and future of RNAV The present and future of RNAV The present and future of RNAV
P.S. Kim, D.W. Shin P.S. Kim, D.W. Shin P.S. Kim, D.W. Shin P.S. Kim, D.W. Shin
****목 차 목 차 목 차 목 차 ....
Ⅰ
Ⅰ
Ⅰ
Ⅰ 서 서 서 서 론 론 론 론 ....
Ⅱ
Ⅱ
Ⅱ
Ⅱ 항법의 정의 및 종류 항법의 정의 및 종류 항법의 정의 및 종류 항법의 정의 및 종류 ....
Ⅲ
Ⅲ
Ⅲ
Ⅲ RNAV RNAV RNAV RNAV 의 의 의 의 개 요 개 요 개 요 개 요 ....
Ⅳ Ⅳ
Ⅳ Ⅳ RNAV RNAV RNAV RNAV 항행 시스템 항행 시스템 항행 시스템 항행 시스템 ....
Ⅴ Ⅴ
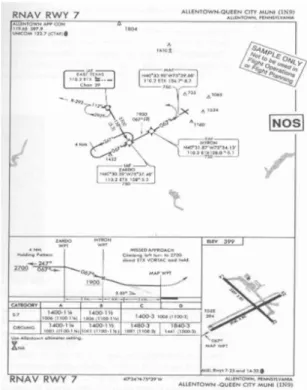
Ⅴ Ⅴ RNAV RNAV RNAV RNAV 계기접근절차 계기접근절차 계기접근절차 계기접근절차 ....
Ⅵ
Ⅵ
Ⅵ
Ⅵ VNAV VNAV VNAV VNAV 의 의 의 의 활 용 활 용 활 용 활 용 ....
Ⅶ
Ⅶ
Ⅶ
Ⅶ RNAV RNAV RNAV RNAV 의 발전 방향 의 발전 방향 의 발전 방향 의 발전 방향
Abstract Abstract Abstract Abstract
In this overview of RNAV(Area Navigation) covers the general notion of air navigation, the general concept of RNAV and Navigational facilities or elements to achieve RNAV. also, this overview includes RNAV operations on instrument approaches with GPS, VNAV(Vertical Navigation) operations and the future of RNAV.
항법
Key Words : (Air Navigation), RNAV