碩 士 學 位 請 求 論 文
L a s e r를 이 용 한 대 형 구 조 물 의 3차 원 거 동 측 정 에 관 한 연 구
A Study on the Three- Dimensional Behavior
Measurement of Large- size Construction Using a Laser
國 民 大 學 校 大 學 院 電 子 工 學 科
鄭
2 0 0 0
碩 士 學 位 請 求 論 文
L a s e r를 이 용 한 대 형 구 조 물 의 3차 원 거 동 측 정 에 관 한 연 구
A Study on the Three- Dimensional Behavior
Measurement of Large- size Construction Using a Laser
指 導 敎 授 金 基 斗
이 論 文 을 碩 士 學 位 請 求 論 文 으 로 提 出 함 .
2 0 0 1年 1月
國 民 大 學 校 大 學 院
電 子 工 學 科
安 弘 鎭 의
碩 士 學 位 請 求 論 文 을 認 准 함 .
200 1年 1月
審 査 委 員 長 司 空 石 鎭 審 査 委 員 朴 永 鎰 審 査 委 員 金 基 斗
國 民 大 學 校 大 學 院
감 사 의 글
본 논문이 있기까지 많은 조언과 격려를 아끼지 않고 지도해 주신 김기두 교 수님께 감사드립니다. 그리고 좋은 논문이 되도록 많은 충고와 세심한 심사를 해 주신 사공석진 교수님과 박영일 교수님께 감사드리며, 한국표준과학연구원의 이창복 박사님께 감사의 말씀을 올리고 싶습니다. 대학시절 많은 가르침을 주신 김도현 교수님, 임재봉 교수님, 조홍구 교수님, 오하령 교수님, 김동명 교수님, 강동욱 교수님, 성영락 교수님께도 감사의 말씀을 올립니다. 전자공학과 대학원 동료들과 신호처리 실험실에서 함께 생활하고 공부했던 선후배들과 윤기방 교 수님, 학창시절에 많은 도움과 우정을 나누었던 친구들, 표준과학연구원의 여러 박사님들과 박상언 박사님, 권택용 박사님, 박영호 등에게도 감사드립니다. 음으 로 양으로 저에게 많은 도움을 주신 그밖에 모든 분들에게 감사의 말씀을 올리 고 싶습니다.
끝으로 어려울 때나 힘들 때 항상 옆에서 격려해주시며 모든 것을 저에게 희 생하시고, 묵묵히 저를 믿어주신 부모님에게 이 논문을 바칩니다.
목 차
국 문 요 약
Ⅰ .서 론 1
Ⅱ . 레 이 저 및 CCD 카 메 라 의 기 본 원 리 3
2.1 레이저의 기본 성질 3
2.2 CCD 카메라의 기본적인 구조 및 원리 5
2.3 레이저의 선택 6
Ⅲ . 레 이 저 및 CCD 카 메 라 시 스 템 적 용 원 리 9
3.1 교량에 적용된 기본적인 원리 9
3.2 레이저 및 CCD 카메라 시스템 10
Ⅳ . 영 상 처 리 를 이 용 한 대 형 구 조 물 의 3차 원 변 위 측 정 12
4.1 영상처리 원리 12
4.2 시각 (V ision ) 및 3차원 변위 측정 원리 16
4.3 고정도 상대 측정 알고리즘 19
Ⅴ . 실 험 결 과 26
5.1 변위 시스템 제작 26
5.2 대형 구조물의 진동 주파수 측정기법 제안 및 실험 30 5.3 거리별 레이저 S pot 자체의 F lu ctu at ion 및 실험결과 34
5.4 3차원 변위측정 실험 37
5.5 V isu al GUI 알고리즘 전체 구성도 40
Ⅵ . 결 론 4 2
부 록 A 4 3
부 록 B 4 6
부 록 C 5 1
참 고 문 헌 5 3
A b s t ra c t 5 4
그 림 목 차
그림 2.1 레이저광의 특성 3
그림 2.2 (a ) CCD 선 주사 센서 (b ) CCD 면 주사 센서 5
그림 2.3 본 연구에서 사용된 레이저빔 pr ofile 8
그림 2.4 이상적인 레이저의 빔 pr ofile 8
그림 3.1 교량에 적용된 예 9
그림 3.2 레이저와 CCD 카메라를 이용한 3차원 변위 측정 구성도 10
그림 3.3 본 연구에 사용된 레이저와 카메라 11
그림 4.1 영상해석의 기본요소 13
그림 4.2 광학적 흐름에 관한 5가지 정합방법 14
그림 4.3 원영상과 부영상의 상관관계 원리 15
그림 4.4 시각 시스템의 하드웨어 구조 16
그림 4.5 레이저의 중심 spot을 구하는 방법 17
그림 4.6 3차원 위치 측정개념 17
그림 4.7 LED를 이용한 상대위치 결정원리 18
그림 4.8 보간법을 적용한 fitting 함수의 예 20
그림 4.9 고정도 상대위치 측정 알고리즘 23
그림 4.10 거동계측 알고리즘 순서도 24
그림 4.11 제작된 이동 시뮬레이터 25
그림 5.1 3차원 변위측정 시스템 구성도 26
그림 5.2 입력영상 320×240 27
그림 5.3 출력영상 320×240 27
그림 5.4 실험장비 27
그림 5.5 레이저 받침대 설계도 1 28
그림 5.6 레이저 받침대 설계도 2 28
그림 5.7 레이저 받침대 29
그림 5.8 3개 레이저를 이용한 경사각 측정원리 29
그림 5.9 진동 주파수 측정 시스템의 구성도 30
그림 5.10 0.5 H z의 경우 측정된 진동주파수 31
그림 5.11 여러 경우 측정된 진동주파수 32
그림 5.12 주파수 10 Hz일 때 측정 주파수 값 33
그림 5.13 y축 변위의 연속 측정값(초당 30개 측정) 33 그림 5.14 (그림 5- 13)의 진동주파수 분석 결과 34 그림 5.15 80 m 에서 레이저 spot F lu ctu ation 35 그림 5.16 100 m에서 레이저 spot F luctu ation 35 그림 5.17 레이저빔의 fluctuation adj acent av erage 36
그림 5.18 x 축 측정값 37
그림 5.19 z축 측정값 37
그림 5.20 x 축의 50 mm 이동한 반복실험 38
그림 5.21 y축의 50 m m 이동한 반복실험 38
그림 5.22 z축의 50 m m 이동한 반복실험 39
그림 5.23 레이저 및 CCD 카메라를 이용한 3차원 변위측정 Visu al 프로그램 40
그림 5.24 좌표 변위의 디스플레이 프로그램 41
표 목 차
표 2.1 레이저 사양 7
국 문 요 약
본 논문은 레이저와 카메라를 이용하여 대형 구조물의 3차원 거동 계측 방식 을 확립하였다. 레이저의 직진성을 이용하며, 레이저의 flu ctuation이 가장 작은 반도체 레이저를 이용하였다. 기준판을 만들고 그 기준판에 LE D (Light Em itti- n g Diode )를 부착하여 기준으로 정하였다. 3차원 거동 계측의 원리는 기준 LE D와 레이저빔 사이의 픽셀간 거리를 이용하였다. 기준판의 영상을 취한 다음 논문에서 제안한 고정도 상대측정 알고리즘을 적용하였고, 고정도 상대측정 알 고리즘에는 보간법(interpolation ), block m at ching , adjacent av er ag e 방식이 포 함되어 있다. 이 방식으로 3차원 거동의 정확성을 수 m m 이하가 되도록 하였 다. 영상을 취한 후 영상처리를 위해 특징기반을 추출하여 영상처리 속도를 향 상시켰다. 3차원 거동 계측의 실험을 위해 레이저 안정성 실험과 레이저 안정을 위해 받침대를 제작하였고, 3차원 이동이 가능한 이동 시뮬레이터를 제작하였 다. 그리고 진동주파수의 측정 방법 및 평가 방법을 제안하였다. 진동주파수의 불확도(uncert ainty )는 0.5 % 이내에 존재한다. 본 논문에서는 경제적이며, 시설 및 측정이 간단한 3차원 거동 계측의 새로운 방식을 제안하였으며, 고정도 상대 측정 알고리즘의 제안으로 높은 정확성을 갖게 되었다.
Ⅰ . 서 론
교량, 댐 등의 대형구조물의 변형 모니터링 방식은 공공 시설물에 대한 위험 도 예측은 물론 상시안전감시 및 관리 분야에 중요한 부분이다. 이에 본 연구 를 하게 되었으며, 현재 급속히 발전하는 계측관련 기술에 힘입어 각종 자동 계측기를 이용한 대형구조물의 손상검출이나 상태변화 감지시스템의 도입이 활발히 이루어지고 있으며, 일부 대형구조물의 경우 상시계측시스템의 설치를 완료하여 운영하고 있다. 하지만 국내의 경우 각 대형구조물에 대한 상시계측 시스템의 표준이 제시되지 않아 동일한 대형구조물의 형식이라 할지라도 적용 되는 항목과 계측기 사양이 서로 상이한 경우가 빈번히 발생하고 있으며, 분석 기술의 미약함으로 인해 측정된 자료를 이용한 대형구조물의 거동(beh avior )을 파악하는데 어려움을 겪고 있다. 따라서 본 논문에서 안전감시 및 관리 시스템 을 구성하기 위해서는 시설물에 대한 측정이 필수적인 요소이며, 이미지 시스 템과 같은 유사한 방법을 취함으로써 구조물에 대한 검사를 보다 저렴하고 간 단하며, 처리 및 대응 속도를 향상시켰다. 또한 중앙처리장치에서 실시간으로 구조물에 대한 자료를 처리하여 안전감시와 구조물의 피로에 대해 보다 정확 한 판단을 내릴 수 있도록 처리한다. 본 논문에서는 실용화가 용이하고 대형구 조물 관리 시스템의 표준을 제안하며, 누구나 쉽게 이용할 수 있도록 관리 시 스템을 개발하고자 이미지 시스템을 접목시킨 레이저를 이용한 대형구조물의 3차원거동 측정 방식을 제안한다. 레이저를 이용한 대형구조물의 관리 시스템 은 아직 개발이 이루어지고 있지 않은 분야이다. CCD (Char g e Coupled Dev ice ) 카메라와 레이저를 이용한 이 제안은 보다 대응속도가 빠르고 기록성 이 뛰어나다. 대형구조물의 상황을 보다 정확하고 빠르게 파악할 수가 있고, 그에 따른 대비책을 세울 수 있다는 점이 장점으로 대두 될 수 있다. 레이저빔 (la ser b eam )이 CCD 카메라에 의하여 영상으로 입력되고, 그 신호는 유선으로 관제소의 컴퓨터로 보내지면 구조물의 변위량을 3차원적으로 측정할 수 있다.
CCD 카메라에 의한 영상처리 데이터로부터 대형시설물의 거동 및 변형을 통 합 모니터링하게 된다. 레이저의 선택 또한 중요하다. 일반 레이저 경우 long t er m 에 대한 안정도에 있어서 신뢰성이 없다[1]. 레이저 내부의 진공관과 렌즈 로 인해 레이저빔이 계속적으로 미세한 진동을 일으키면서 변하므로 이 연구 에서는 안정된 레이저가 필수적이기 때문에 일반 레이저를 사용하기보다는 cir cu lar b eam diode la s er 가 적합하다. 이 레이저는 동일한 전력 (pow er )을 가 진 레이저보다 그 크기가 매우 작고 취급이 편리하며 가장 중요한 lon g t erm 에 대해서도 수배 안정적이다. 다이오드 레이저빔 pr ofile이 가우시안 형태를 유지하고 있다. 레이저를 이용한 3차원 거동 측정에서 기준판을 제작하여 구조 물에 부착하는 방법을 이용하였다. 영상 처리를 위해 고정도 상대측정 알고리 즘을 제안하여 보다 정확한 거동 산출을 하게 되었다[2,3,4]. 또한 사용자의 편 의를 위해 대형구조물의 3차원 거동에 대한 시스템을 프로그램화 했다.
Ⅱ . 레 이 저 및 CCD 카 메 라 의 기 본 원 리
2 .1 레 이 저 의 기 본 성 질
태양 광을 비롯해 형광등, 밤하늘을 수놓는 불꽃놀이의 불꽃, 원자나 분자가 방출하는 전자파 및 텔레비전 방송과 마이크로파 중계의 전파 등은 본질적으로 같은 파동이다[1]. 모든 광은 어떤 에너지를 갖고 원자나 분자가 자연적으로 빛 을 내는 것으로, 태양에서 방출하는 광과 성질이 같다. 이러한 광을 자연광이라 한다. 레이저광은 원자나 분자가 광을 방사하는 과정을 외부에서 제어하고, 자 연적으로 존재하지 않았던 광을 만들어낸 것으로 자연광에 비해 두드러진 특성 을 갖고 있다. 레이저광의 특성을 자연광과 비교하여 설명하면 다음과 같다 [1,4]. 첫째, 레이저광은 스펙트럼 폭이 0에 가까운 선스펙트럼을 갖는 단색 광 이다. 둘째, 레이저광선은 평행광선이고, 무한원점의 점광원에서 방사된 광에 해 당한다. 셋째, 레이저광은 거의 퍼지지 않는 상태로 직진한다. 넷째, 레이저광은 순수하게 정현파적으로 진동하는 광파이다. 그림 2.1은 레이저광의 특성을 보여 주며, 광 세기는 거리에 따라 일반적으로 가우스 분포(Gau s sian distribution )를 나타낸다[1].
그림 2.1에서 r0와 I는 각각 빔의 반경과 세기를 나타낸다. 레이저 발진기의 출력 빔의 강도는 일반적으로 가우스 분포로 표현되고, 빔 중심부의 강도가 가 장 크며 반지름 방향으로 나갈수록 완만하게 작아져 빔 모양이 명확하지 않게 된다. 이러한 이유로 그림 2.1과 같이 단일 횡모드에 있어서 빔의 최대강도 I는 그림 2.1과 같이 정의된다. 또 빔의 반지름을 r0라 하면 실효 단면적 안에서의 에너지 밀도는
E
d =E
r
20 (2.1)이다. 펄스 폭이
t
일 경우 전력 밀도, 즉 강도는 식(2.2)와 같다.I = E
dt = E
r
20t
(2.2)가우스형의 강도분포를 갖는 레이저빔에서 실효 단면적 안에 포함되는 출력 은 전 출력의 약 86.5%가 된다. 또 빔의 전 출력을 pow er m et er 등으로 측정하 기 위해서는
r
0의 약 2배에 해당하는 유효 반지름을 갖는 센서의 수광면 (det ect or size )이 필요하다. 레이저빔이 가우스형이 아닌 다중 횡모드인 경우는 빔 지름이나 단면적을 명확히 정의할 수 없게 된다.2 .2 CCD 카 메 라 의 기 본 적 인 구 조 및 원 리
디지털 영상을 획득하기 위해서는 두 가지 요소가 필요하다. 첫 번째 요소는 전자장 에너지 대역(X선, 자외선, 가시영역, 적외선) 중에서 한 영역에 민감하 고, 감지된 에너지에 비례하는 전기신호 출력을 생성하는 물리적 장치이다. 그 리고, 두 번째는 물리적인 감지 장치의 출력을 디지털 형태로 바꾸어 주는 장치 인 디지타이저(digitizer )이다[5,8]. 이러한 목적을 위한 고체 광 감지기는 입력되 는 빛의 강도에 비례하는 출력 전압을 생성하는 포토사이트(ph ot osit e)라고 불 리는 디지털 실리콘 화소로 이루어져 있다. 고체 광 감지기에서 사용된 기술은 원칙적으로 CCD에 기초하고 있다[8]. 그림 2.2(a )에서와 같이 전형적인 선 주사 CCD 센서는 한 줄의 포토사이트, 화소의 내용을 전송하기 위한 두 개의 트랜 지스터 게이트인 전송 레지스터, 트랜지스터 게이트의 내용을 증폭기로 전송하 기 위한 출력 게이트로 이루어져 있다.
그림 2.2 (a ) CCD 선 주사 센서 (b ) CCD 면 주사 센서
CCD 배열은 포토사이트가 행렬 형태로 구성되어 있고, 게이트/ 트랜지스터 레 지스터가 그림 2.2(b )와 같이 포토사이트의 열을 분리하고 있다는 점을 제외하 고는 선 주사 센서와 유사하다. 카메라의 출력을 디지타이저로 전송해서 영상을 디지털화 한다.
2 .3 레 이 저 의 선 택
레이저빔의 영상처리를 통해 변위를 측정하는 거동 계측 방식의 경우 레이저 의 lon g term 에 대한 빔 안정도(pointing st ability )가 측정 정확도를 좌우한다.
H e - N e 레이저의 경우 내부 렌즈 사이의 진공관과 외부환경으로 인해서 레이저 빔 자체가 계속적으로 변하며 cir cular 빔 다이오드 레이저는 빔 안정도가 우수 하다. 레이저는 동일한 파워(pow er )를 가진 일반 레이저보다 그 크기가 매우 작 고 취급이 편리하며 빔 profile이 원형을 유지하고 있다. 레이저의 경우 거리가 길어지면 그에 따른 빔의 퍼짐이 아주 심각하기 때문에 이러한 문제를 해결하 기 위하여 빔 ex pan der를 부착하여 빔의 퍼짐(disper sion )을 최소로 할 수 있다 [1,4]. 본 논문에서는 빔 ex pan der 를 부착하지는 않았다. 그 만큼 레이저의 퍼짐 이 심각하지 않은 반도체 레이저를 사용했기 때문이다. 레이저 사양은 표 2.1에 나타난 바와 같다.
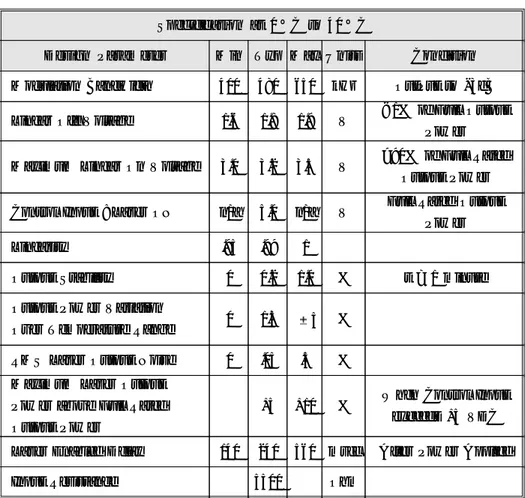
표 2.1 레이저 사양
S pec ific ati on at 0° C t o 40° C
D e s ig n P aram et er M in T y p M ax U nit s Con dition Modulat ion Bandw idth 400 480 650 kHz OutPut t o - 3dB Linear Off Volt age 1.6 1.8 1.9 V < 1% of Full Output
P ow er Max imum Lin ear On V olt age 3.0 3.2 3.5 V > 90% of F ull Rat ed
Output P ow er Control Input : Laser ON n/ a 5.0 n/ a V Full Rat ed Out put
P ow er
Linearity .95 .99 1
Output St ability 0 0.2 1.0 % t = 1 minut e
Output P ow er Variation
Ov er T emperat ure Range 0 1.3 5 %
RMS Laser Output Noise 0 .05 .5 %
Max imum Laser Output P ow er abov e F ull Rat ed Output P ow er
+5 +10 % When Control Input ex ceeds +5 VDC Laser Enabled Delay 140 240 560 m s ec Aft er Pow er Applied
Input Resist ance 5500 Ohm
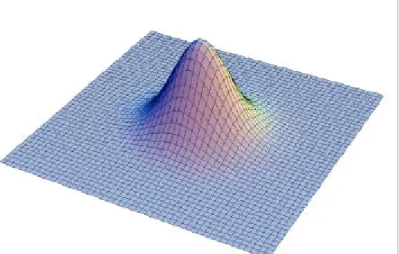
본 논문에서는 레이저 영상을 획득하여 그 빔 pr ofile을 조사 한 결과가 그림 2.3 이다. 그림 2.3은 본 논문에서 사용한 레이저의 빔 pr ofile이다. 레이저는 파 워가 on 된 후 일정시간이 지나야 안정된 출력을 보내게 된다[4]. 안정된 레이 저 출력의 빔 형태는 가우시안 형태를 가진다. 그림 2.4는 이상적인 레이저의 빔 pr ofile를 나타낸다.
그림 2.3 본 논문에서는 사용된 레이저빔 pr ofile
그림 2.4 이상적인 레이저의 빔 pr ofile
Ⅲ . 레 이 저 및 CCD 카 메 라 시 스 템 적 용 원 리
3 .1 교 량 에 적 용 된 시 스 템 의 기 본 적 인 원 리
레이저와 CCD 카메라의 원리 및 광학적 이론, 신호처리 개념, 그리고 영상처 리 등을 이용한 전체 시스템의 원리를 설명하면 다음과 같다. 그림 3.1은 본 논 문의 개념을 교량에 적용한 그림이다. 교량의 진동이 가장 심한 곳을 기준으로 상판의 움직임을 알 수 있도록 대상판(plan e)을 위치시키며, 이 대상판은 CCD 카메라의 영상으로 입력이 된다. 대상판에는 8개의 기준 LED가 있으며, 레이저 빔과 LE D를 영상으로 입력을 받고, 레이저빔과 LED 사이의 픽셀 사이의 거리 를 이용하여 상대적 변위량을 산출하게 된다. 교량 상판의 좌우와 상하의 움직 임을 카메라로 인식하여 변위를 산출하게 되고, 레이저는 3개를 사용하여 3차원 적으로 교량의 전체적인 거동을 측정한다.
그림 3.1 교량에 적용된 예
3 .2 레 이 저 및 CCD 카 메 라 시 스 템
그림 3.2는 레이저와 CCD 카메라를 이용한 3차원 변위 계측시스템의 구성 원리도 이다. 다이오드 레이저로부터 투사된 변위 측정 기준면의 레이저 spot을 CCD의 정지영상으로 입력받아 화상처리하고 그 결과 얻은 위치정보와 LE D 기 준점 간의 상대적인 위치정보로부터 레이저 spot의 변위량을 계산한다. 그림 3.2(a )는 본 논문에서 제안한 변위 측정 순서도 이고, 그림 3.2 (b )는 각 구성요소 들을 나타낸 것이다.
그림 3.2 레이저와 CCD 카메라를 이용한 3차원 변위 측정 구성도
림 3.3은 본 논문에서 사용된 레이저와 CCD 카메라를 보여준다. 레이저는 외부에서 전력 변조 및 광 변조(optical m odulation )가 가능하도록 되어 있다 [2,3,4]. 빔의 지름은 1.3 m m 이고, 빔이 퍼지는 각도는 0.75 m r ad 이다.
그림 3.3 본 논문에 사용된 레이저와 카메라
Ⅳ . 영 상 처 리 를 이 용 한 대 형 구 조 물 의 3차 원 변 위 측 정
4 .1 영 상 처 리 원 리
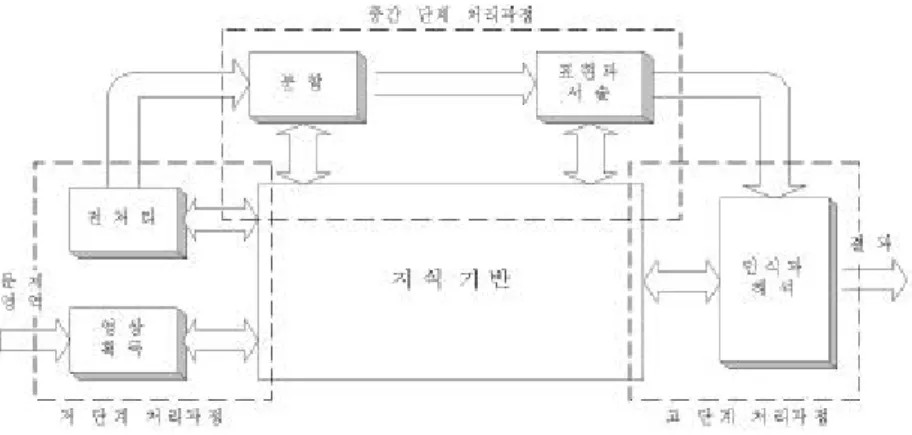
생물체의 시각이든 컴퓨터에 의한 시각이든 시각 작용의 역할은 빛에 의한 영상으로부터 어떠한 정보를 얻어내는 일이다. 자연세계의 입체적 광경은 빛으 로 전달되어 동물의 망막에 투영되거나, 비디오 카메라의 경우 렌즈 후면에 영 상이 투영된다. 어느 것이든 공간의 입체적 광경을 평면의 영상으로 투영한다는 데 공통점이 있다. 평면 영상의 패턴으로부터 공간물체의 특성과 물체 사이의 관련성을 추출하여 인식과 판단의 기초 정보를 획득하는 문제는 동물의 지능이 나 컴퓨터의 인공지능에 있어서 핵심적 사항이 아닐 수 없다. 동물의 시각과 두 뇌 구조는 주변의 먹이를 인지할 수 있거나 위험 등을 감지할 수 있고 주변세 계의 구조에 대한 정보를 파악할 수 있도록 되어 있다. 개체의 위치와 그것들의 상호 관련 및 특성을 두뇌에서 조작할 수 있는 어떤 심벌로 변환시키고 그것을 통하여 다음에 취할 행동에 대한 계획을 마련한다. 컴퓨터 시각(comput er v ision )에서는 여러 가지 특별한 목적에 따라 시스템의 구조를 규정한다. 문자인 식, 염색체의 분류, 인공위성 영상에 의한 자연자원 정보의 판단, 로봇의 이동에 필요한 정보인식 등 다양한 목적으로 컴퓨터의 시각적 인식 시스템을 구성한다 [5,8]. 영상 해석의 범위를 세 가지 기본 영역으로 나누는 기법은 개념적으로 유 용하다. 이들 영역들은 (1) 저단계 처리과정, (2) 중간 처리과정, (3) 고단계 처 리과정이다. 이러한 세 부분들이 비록 명확한 한계를 갖지는 않지만, 자동 영상 해석 시스템에서 고유한 요소들인 이들 여러 가지 처리과정들을 분류하는 데
그림 4.1 영상해석의 기본요소
중첩된 점선들은 처리과정들 사이에 분명한 경계가 없다는 것을 표시한 것이 다. 영상 해석은 인식된 영상 요소들의 한 집단에 의미를 부여하는 것을 다룬 다. 영상 해석의 방법론 배경에 깔려 있는 주된 개념은 문제 영역에 대한 효과 적인 구성과 지식의 사용에 있다. 생물의 시각 시스템이 이산적이긴 하지만, 광 강도(int en sity )에 대한 정량화는 매우 세밀하기 때문에 거의 연속적인 광강도를 인식하는 것과 같다. 이러한 세밀한 광강도를 가진 두 개의 연속된 영상의 변화 를 연속적 흐름으로 나타낼 수 있다. 그러한 연속 정보를 광류(optical flow )라 고 부른다. 광류, 즉 순간적인 속도장(v elocity field )은 영상 면의 모든 점 또는 픽셀에서 2차원의 속도 벡터를 결정한다[7,8].
3차원 공간에서 물체의 표면 영상에 대한 광류가 변화하지 않고 고정적이라 는 사실과 광류의 연속성은 매우 중요한 사실로서 여러 가지 영상 분할화 (segm en t at ion )와 점 정합 (poin t - m at ch in g )에 대해 널리 이용되고 있다. 일정한 간격으로 얻어진 영상들로부터 정합 작업을 할 때 흔히 이용되는 방법으로 5가 지 사항을 아래에 제시한다[5,7,8].
그림 4.2 광학적 흐름에 관한 5가지 정합방법
그림 4.2는 광학적 흐름에 관한 5가지 정합방법을 나타낸다. 그림에서 첫째, 최대속도는 공간상에 한 점의 최대 속도가 V라고 알려져 있는 경우 시간 간격
d t 만큼 떨어진 두 영상 사이에서 동일한 점은 최대 V d t 만큼의 거리를 이용
했을 것이다. 따라서 한 물체의 영상 점이 d t 시간 간격 후의 영상에서 나타날 곳은 원래의 지점에서
V d t 거리를 벗어나지 않는 곳임이 틀림없다. 둘째, 작은
속도 변화는 대부분의 물리적인 물체가 유한한 무게를 가지게 되므로 물리적인 법칙에 따라 작은 시간 간격 dt 사이에서 변화를 받는 속도의 양은 작을 것이 다. 그러므로 시간 간격 d t 후의 속도는 원래의 속도에서 크게 변화되지 않은 속도일 것이다. 셋째, 공동 속도는 한 물체의 여러 표면에서 점이 연속되는 영 상으로 동일한 또는 공통적인 속도를 지닐 것이다. 넷째, 일관성 있는 정합사상 과 예견된 운동 등은 일정한 시간 간격으로 촬영된 영상에서 동일한 광류를 가은 특징 정합(pr operty m at ching ) 분야이다. 미지의 영상과 이미 알고있는 영상 의 각 픽셀 집합간에 가장 잘 일치하는 것을 찾아내는 것이다. 한가지 접근 방 법은 미지의 영상과 알고 있는 각각 영상간의 상관성을 계산하는 것이다. 가장 잘 맞는 것을 찾으려면 가장 큰 상관성 함수 값을 가지는 영상을 택하면 찾을 수 있다. 결과로서 생기는 상관성은 2차원 함수이기 때문에, 찾는 과정에는 각 각의 함수에서 가장 큰 진폭을 찾아내는 작업도 포함된다. 이러한 위의 설명들 의 한 분야가 block m at chin g이라 불리운다[7,8,9,10,13]. 그림4.3은 원영상과 부 영상의 상관관계 원리를 설명하기 위한 것이다. 크기
M N
의 영상f (x , y )
내에 있는 크기J K
의 부 영상w( x , y )
의 정합들을 찾고자 한다. 여기서,J M
이고,K N
이라 가정한다. 이 상관성 방법은 벡터 형태로도 공식화할 수 있지만, 영상 혹은 부영상 형태로 하는 것이 보다 직관적이다. 가장 간단한 형태로,f (x , y )
와w (x , y )
사이의 상관은 식(4.1)로 표현될 수 있다.c ( s, t) =
x y
f ( x , y ) w (x - s, y - t)
(4.1)여기서,
s = 0 , 1, 2 , 3 , . . . , M - 1
,t = 0 , 1, 2 , 3 , . . . , N - 1
이고 합 연산 은 w와f
가 겹치는 영상 영역에서 이루어진다.그림 4.3 원영상과 부영상의 상관관계 원리
4 .2 시 각 (V i s i on ) 및 3차 원 변 위 측 정 원 리
대형구조물의 안전도를 평가하거나 제어하는 방법은 여러 종류가 있다. 이때 현재의 상태를 입력받는 파라미터는 다양하다고 할 수 있다. 전압, 전류, 주파 수, 시간, 온도, 위치 데이터 등이 이에 해당된다. 시각이란 이러한 입력 매체 중에서 카메라를 이용하여 2차원의 위치 데이터를 입력받아서 검사 제어하는 방법으로서 비접촉방식이며 인간의 육안검사와 가장 근접한 품질을 기대할 수 있다[8].
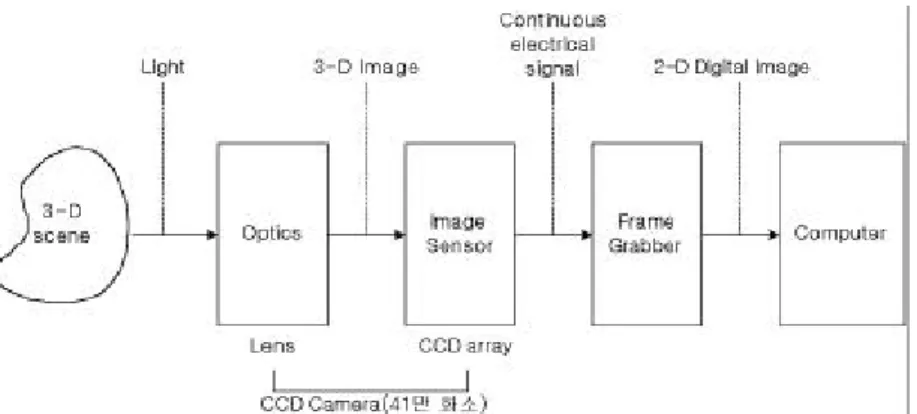
그림 4.4는 시각 시스템의 하드웨어 구조를 설명한 것이다. CCD arr ay와 opt ics 그리고 fr am e gr abb er 의 구성 요소로서 설계된다. 이미지가 optics를 거 쳐 전기신호로 변환되고, fr am e gr abber를 통해 2차원 디지털 이미지로 변환되 어 컴퓨터에서 신호를 처리하게 된다. 그림 4.5에 제시한 방법으로 레이저의 중 심 spot의 위치 정보를 찾게 된다.
그림 4.4 시각 시스템의 하드웨어 구조
그림 4.5 레이저의 중심 spot을 구하는 방법
레이저를 이용한 3차원 변위 측정기술은 여기서 기하학적으로 처리하여 사용 자 인터페이스를 향상시켰다. 본 논문에서 3차원 거동 측정을 하기 위해 레이저 3대를 사용하였고, 그림 4.6은 이러한 구조를 설명해 주며 3차원 거동 측정의 예로 제시한다.
그림 4.6 3차원 위치 측정개념
기본적으로 점 A , B , B '가 레이저의 spot이다. 점 A는 영상처리를 통하여 2 차원 측정을 하고 점 A와 점 B를 동시에 사용하여 3차원 영상처리를 하게 된
다. 교량의 좌우 움직임은 레이저 spot 하나로 가능하며, 교량의 앞과 뒤의 움 직임은 선분 AB와 선분 GH를 비교하여 알아낼 수 있다. 그림 4.5에서 중요한 또 하나의 요소는 바로 기준 LED이다. 기준 LED간의 거리는 일정하며 LED와 레이저 사이의 픽셀간 거리를 통하여 상대적인 레이저 spot의 변위를 측정한다.
본 논문에서 중요한 것이 바로 기준 LED를 이용한 픽셀간 상대거리 측정이다.
기준 LED로 인하여 영상 신호처리가 아주 간단하게 되고, 전체 시스템이 간략 해진다. 기준 LED는 모든 변위를 산출하는 상대 변위 기준점이 된다. 시스템 설계 당시 그림 4.6의 는 정해지는 각도이고, 이 각도를 가지고 비례상수 K 가 정의된다. 이 영상 기하학은 보통 자주 사용하는 접근법으로 한 영상의 작은 구역 내의 한 점을 골라 상관관계 기법을 이용해서 다른 영상에서 가장 잘 맞 는 구역을 찾게 된다. 그런데 독특한 특징을 가지고 있을 때 특징기반 (feat ur e - m at chin g ) 접근법이 문제해결의 더 빠른 방법이 될 수 있다[8]. 예를 들면 본 논문에서는 레이저가 원형을 유지한다는 것과 레이저의 적색 성분을 이용하였으며, 어떤 특징기반이 있는지를 정확히 파악하여 문제를 해결한 것이 다. 2차원 변위 측정의 자세한 원리는 그림 4.7과 같다.
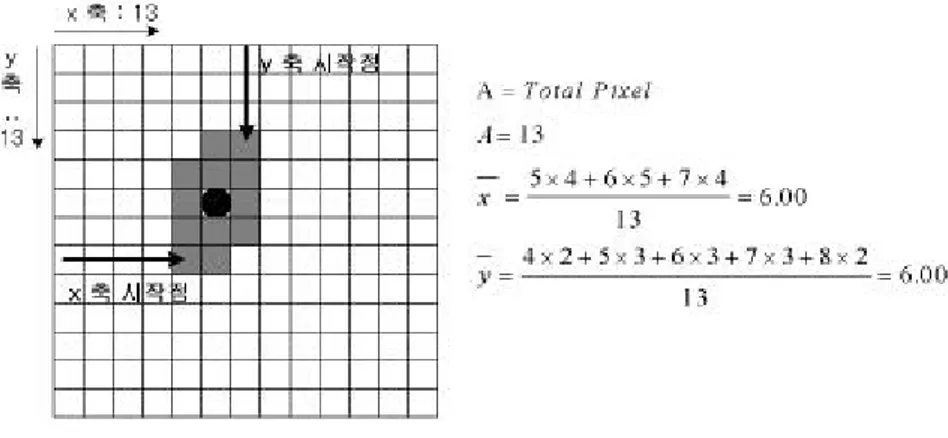
이러한 기준점(LED )을 이용하여 레이저 spot의 상대위치를 측정하는 방법은 원리가 매우 간단하고 정확한 3차원 변위측정이 가능하다. 레이저빔 spot의 상 대적인 위치변화를 측정하는 방법은 LED 기준영상을 이용하여 기준 LED의 픽 셀정보와 레이저빔 spot의 픽셀정보간 거리로 레이저 spot의 변위값을 계산한 다. z축으로의 변위값은 두 레이저빔 사이의 픽셀간 거리변화를 이용하여 계산 한다. 그림 4.7은 이러한 기준점을 이용하여 변위량을 산출하는 방법으로 측정 원리 및 계산 예를 보여주고 있다. 이 원리는 매우 간단하면서 정확한 결과를 얻을 수 있다.
4 .3 고 정 도 상 대 측 정 알 고 리 즘
이 알고리즘은 본 논문을 통해 새롭게 제안한 알고리즘으로 기존의 영상 처 리에서는 정수 값의 픽셀 정보밖에 얻을 수 없었으나 좀 더 정확한 변위량을 계산하기 위해서 제안하였다. 먼저 block m at chin g과 시각 시스템의 중심 픽셀 을 찾는 방법을 이용하여 영상정보를 처리하고 기준점 상대위치 알고리즘을 적 용하면 레이저빔 spot 영상의 정확한 위치를 결정할 수 있다. 대형 구조물에서 보통 요구하는 정확도는 수 m m 단위이므로 영상처리에 의한 정확도를 더 높일 필요가 있다. 부영상과 원영상 사이의 정합 차이를 Er로 하고 E r의 정의는 식 (4.2)와 같다.
E
r =m i = 1
n
j = 1{ Tij- Iij}2 (4.2)
입력 영상의 크기 M N 까지 E r 값을 구한 다음 가장 작은 오차를 가지는 것이 m atchin g 정도가 우수하다고 보는 것이다. 여기서 m 과 n은 템플리트
(t em plat e ) 영상 크기가 되고, M 과 N 은 입력영상의 크기가 된다.
T
ij는 템플 리트 영상의 i번째와 j 번째 픽셀 값, Iij는 입력 영상의 i번째와 j 번째 픽셀 값이 된다. 보간법을 적용한 고정도 상대 측정 알고리즘의 원리는 그림 4.8과 같이 여러 점들의 집합을 2차 함수로 fitting 한 다음 구하고자 하는 값(최소값) 을 얻는 것이다[10,11,12].그림 4.8 보간법을 적용한 fitting 함수의 예
그림 4.8에서 포물선의 함수는 2차 함수이며, n은 정수이다. 포물선의 방정식 을 세우면 식(4.3)과 같다.
f ( x ) = ax
2+ bx + c (4.3 )점 A , B , C, D , E는 각각 E r 값에 상응하는 기호이며, 이 점들로부터 fittin g
과 어느 정도 오차를 가지게 된다. 최소 꼭지점을 찾는 과정을 설명하면 다음과 같다. 먼저 식(4.4)를 정의하여, 미지수 a , b, c의 함수를 만든다.
n
i = - n[ yi- f ( xi) ]2 = E ( a , b, c) (4.4 )
최소값을 찾기 위해서는 식(4.5)을 만족해야한다.
E
a
= 0 ,E
b
= 0 ,E
c
= 0 (4.5 )a (i = - nn [
- yi+ ax2i + bxi+ c]
2)
= 2
n
i = - n
[
- yi+ ax2i + bxi+ c] x
2i= -
n
i = - n
y
ix
2i + an
i = - n
x
4i + bn
i = n
x
3i + cn i = - n
x
2i= 0
(4.6 )
b (- ni = n[
- yi+ ax2i + bxi+ c]
2)
= 2
n
i = - n
[
- yi+ ax2i + bxi+ c] x
i= -
n
i = - n
y
ix
i+ an
i = - n
x
3i + bn
i = n
x
2i + cn i = - n
x
i= 0
(4.7 )
c (- ni = n[
- yi+ ax2i + bxi+ c]
2)
= 2
n
i = - n
[
- yi+ ax2i + bxi+ c]
= -
n
i = - n
y
i+ an
i = - n
x
2i + bn
i = n
x
i+ c ( 2 n + 1)= 0
(4.8 )
식(4.6), (4.7), (4.8)의 내용을 행렬로 표현하면 식(4.9)가 된다.
[ X ]
a b c
=
y
ix
2iy
ix
iy
i(4.9)
여기서 [ X ]는,
[ X ] =
x
4ix
3ix
2ix
3ix
2ix
ix
2ix
i ( 2 n + 1)(4.10)
식(4.10)을 부영상의 픽셀 갯수 n 으로 표현하기 위해
x
m의 일반항으로 표 현하기 위해서, 먼저 식(4.11)를 정의한다.( K + 1)m- Km = m Km - 1+ a 'Km - 2+ b'K m - 3+ + m K + 1 (4.11)
식(4.11)의 K 를 1~ l(양의정수)까지 대입하여 합하면 원하는
x
m를 구할 수 있다. 식(4.11)를 이용하여 식(4.10)의 각 요소를 구하면, 식(4.12)가 된다. 이에 대한 자세한 증명은 부록C에 나타나 있다.1
15 n ( n + 1)(2n + 1)(3n2+ 3n - 1) 0 1
3 n ( n + 1)(2n + 1)
0 1
3 n ( n + 1)( 2n + 1) 0 1
3 n ( n + 1)(2n + 1) 0 2n + 1
(4.12)
식(4.12)에서 n 은 부영상의 전체 픽셀 개수다. 결과적으로 식(4.9)의 우변은 알 수 있는 값이고 좌변의 [ X ]도 식 (4.12)로 구할 수 있는 값이다. 연립 방정 식(4.9)를 풀면 미지수 a , b, c를 구할 수 있다. 그리고 2차 포물선 방정식의 최 소값 즉, 꼭지점의 x 좌표를 구하기 위해서는 미지수 a , b만 알면 된다.
고정도 상대 측정은 정수 값의 픽셀을 소수점이하까지의 정확도로 그 정보를 알아내는 새로운 방식이다. 그림 4.9는 이러한 과정을 보여주는 예이다. 임의의 영상에서 원하는 픽셀 정보 값이 4 이었다고 가정하자.
그림 4.9 고정도 상대위치 측정 알고리즘
실제 위치는 0.0523만큼 떨어진 곳에 존재하는데 이러한 오차를 보정하여 그 림 4.9에서의 fittin g한 포물선의 꼭지점에 상응하는 x 좌표를 얻게 된다. 고정도 상대측정 알고리즘의 적용으로 상당히 정확한 결과 값을 얻을 수 있고, 실내 환 경하의 측정값은 0.1 m m 정도의 정확성을 유지하였다. 전체적인 알고리즘의 순 서도를 보면 그림 4.10과 같다.
그림 4.10 거동계측 알고리즘 순서도
CCD 카메라에서 영상을 받아들여 레이저빔의 위치를 확인한 다음, 고정도
도 상대측정 알고리즘, 보간법 등의 C 프로그램은 부록 B에 있다.
그림 4.11 제작된 이동 시뮬레이터
그림 4.11은 가상적으로 대형 구조물의 움직임을 측정하기 위한 장치인 3축 이동 시뮬레이터이다. 상하 진동을 y축, 앞뒤 진동을 z축, 좌우를 x축으로 정의 한다. 원격 조정이 가능하도록 설계를 했으며 x , y , z축 모두 최대 0에서 60 cm 까지 움직일 수 있다. 이동 시뮬레이터의 상세한 설명은 부록 A에 첨부하였다.
Ⅴ . 실 험 결 과
5 .1 변 위 측 정 시 스 템 제 작
그림 5.1은 시스템 구성을 나타낸 것이다. 3차원 측정뿐만 아니라 경사각 측 정이 가능하며, 레이저는 3개가 사용된다. 정지 영상을 통하여 레이저 및 LED 의 위치를 알아내며, 카메라 제어는 RS - 232C 통신으로 제어를 한다. 그리고 이 동 시뮬레이터는 프린터 포트(병렬통신)로 제어를 하게 된다.
그림 5.1 3차원 변위측정 시스템 구성도
된다.
그림 5.2 입력 영상 320×240
그림 5.3 출력 영상 320×240
그림 5.4는 레이저 받침대와 이동 시뮬레이터 그리고 컨트롤러 등의 본 논문 을 위해 사용된 실제 장비들을 보여준다. 이동 시뮬레이터 사양은 부록 A 에 수 록하였다.
그림 5.4 실험장비
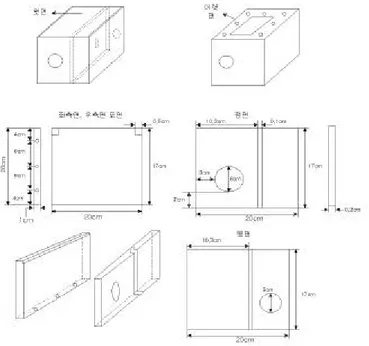
그림 5.5와 5.6은 레이저 받침대의 설계도이고, 그림 5.7은 완성된 레이저 받침 대이다.
그림 5.5 레이저 받침대 설계도 1
그림 5.7 레이저 받침대
레이저 받침대는 바람 및 외부환경에 안정하도록 설계 제작하였다. 특히 다리 부분에 2중 고정 장치를 설치하여 외부환경에 적응할 수 있도록 제작했다. 그림 5.8은 3개의 레이저를 이용한 기하학적 경사각 측정 원리를 설명하고 있으며, 각 레이저빔 및 LED 위치의 픽셀간 거리를 이용하여 경사각을 산출할 수 있다.
그림 5.8 3개 레이저를 이용한 경사각 측정 원리
5 .2 대 형 구 조 물 의 진 동 주 파 수 측 정 기 법 제 안 및 실 험
대형 구조물의 피로누적을 주기적으로 모니터링 하기 위해 일반적으로 많이 사용되는 표준 파라미터가 진동 주파수이다. 고유진동주파수보다 진동이 커지면 시간이 지날수록 구조물에 피로가 누적되어 심각한 결과를 초래하므로 이러한 변화를 주기적으로 모니터링 해야 할 필요가 있다. 따라서 본 논문에서도 진동 주파수 측정기법을 제안한 것이다. 본 논문에서는 카메라를 사용하여 대형구조 물의 3차원 거동을 측정하기 때문에 주파수를 측정하기 위해서는 카메라 프레 임 오차를 알아야 한다. 주파수 측정의 정확성은 카메라 프레임이 얼마나 정확 한가에 따라 정확성이 달라지기 때문이다. 그림 5.9는 진동 주파수 측정 시스템 의 구성도 이다.
그림 5- 9. 진동 주파수 측정 시스템의 구성도
레이저를 광 변조(펄스파)하여 CCD 카메라로 영상을 얻는다. 영상을 분석하 여 주파수를 계산하고 난 후, 원자시계에 Lock된 펄스 발생기(pulse g ener at or )
나 시설물 안전도 평가에서 주파수는 60 H z에서 100 H z까지의 정확성을 요구 하는데, 이러한 문제는 220 프레임용 고속 카메라를 구입하여 측정하면 해결할 수 있다.
1 ) 진 동 주 파 수 성 능 평 가 실 험
그림 5.10은 그림 5.9의 구성도를 이용하여펄스 생성기에서 나온 0.5 H z에 대 해 진동 주파수를 측정한 값이다. 대략 기본 주파수가 0.5 H z 근처에 존재한다.
실내 5 m 의 거리에서 측정하였고, 총 60초 동안 1800개의 데이터를 처리 하였 다. 이때 F F T 연산을 위해 1024개의 데이터만을 취했으며, 그림 5.10(a )와 5.10 (b )는 각각 F F T 연산의 입력인 0.5 H z 펄스열과 출력 스펙트럼 데이터를 나타낸다. 이때 F F T 연산을 위해 시뮬레이션 툴인 Origin6.0을 사용하였다.
(a ) F F T 연산의 입력인 0.5 H z 펄스열
(b ) F F T 연산의 0.5 H z 출력 스펙트럼
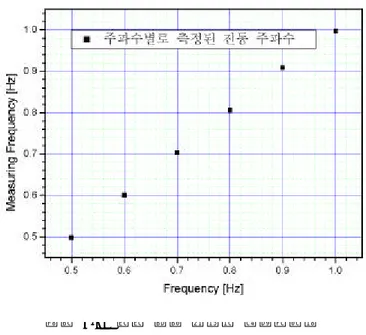
그림 5.11은 주파수별 진동주파수 측정값이며, 측정된 주파수의 불확도는 0.5 % 이내에 들어온다.
그림 5.11 여러 경우 측정된 진동주파수
그림 5.12는 10 H z에 대해 측정한 실험결과이다. 결과적으로 이러한 주파수 측정실험을 통해 본 논문의 주파수 측정이 정확성을 유지한다는 것을 알 수가 있었으며 이러한 실험을 기초로 임의의 진동 주파수를 측정한다.
그림 5.12 주파수 10 H z일 때 측정 주파수 값
2 ) 실 제 진 동 주 파 수 측 정 실 험 결 과
그림 5.13은 이동 시뮬레이터의 진동폭을 1 cm 로 하고, 임의의 진동주파수로 진동시켜 측정한 실험이다. 이동 시뮬레이터의 기계적 진동이 일정하지 않기 때 문에 1 cm 의 폭을 넘긴 경우가 발생할 수 있으며, 결과적으로 기본 주파수는 조금씩 오차가 생길 수 있다.
그림 5.13 y축 변위의 연속측정값 (초당 30 개 측정)
그림 5.14 (그림 5- 13)의 진동주파수 분석결과
그림 5.14로 부터 진동주파수는 이동 시뮬레이터의 기계적 진동주기가 일정하 지 않기 때문에 진동주파수가 변동하는 것을 알 수 있다. 결과적으로 기계적인 원인으로 발생되는 진동주파수의 측정은 여러 대역의 진동신호 주파수가 있으 며 이중 가장 큰 크기를 갖는 것이 기본 진동주파수가 된다.
5 .3 거 리 별 레 이 저 S pot 자 체 의 F lu c tu ation 및 실 험 결 과
레이저 spot의 fluctu ation은 대형구조물 3차원 거동 측정 시스템에서 가장 큰 오차요인이 될 수가 있기 때문에 이러한 문제를 고려해야 한다. 그림 5.15와 그 림 5.16은 각각 80 m 와 100 m에서의 flu ctuation의 실험 결과이다.
그림 5.15 80 m에서 레이저의 spot fluctu ation
그림 5.16 100 m 에서 레이저의 spot flu ct u ation
그림 5.15는 분당 2개로 43분 동안 레이저 spot의 변동을 본 것으로 1픽셀 당 1 m m 의 정확도로 측정된 데이터이다. 여기서 볼 수 있듯이 외부 환경 하에서 도 아주 정밀한 측정이 가능하며 보통 교량의 경우 10 cm 의 폭으로 진동을 하 므로 충분한 정확도를 유지하고 있음을 알 수 있다. 그림 5.16은 100 m 거리의 레이저 spot 자체의 변동을 본 것으로 15초당 1개로 총 65분을 측정한 데이터 이다. 마찬가지로 1픽셀 당 1 m m의 정확도를 유지하며 측정하였다. 두 개의 데
이터는 외부 환경조건이 조금은 다르다. 그림 5.15는 아스팔트 위에서 바람이 많은 날 측정한 데이터이고, 그림 5.16은 잔디밭에서 바람이 심한 날 측정한 데 이터이다. 거리가 멀수록 spot 자체의 변동이 조금 심하다는 것을 볼 수 있다.
이러한 문제점을 해결하려면 우선 요동의 전체 폭이 어느 정도인지를 알아야 하는데 위 그림을 보면 대략 5 ~ 6 m m 임을 알 수 있다.
그림 5.17 레이저빔의 fluctu ation adjacent av er age
그림 5.17에서 보듯이 adj acent av er age를 취한 결과 fluctu ation이 대략1 m m 정도로 감소함을 볼 수 있다. 이러한 레이저 spot 자체의 fluctuation 발생요인 은 외부 온도와 환경, 습도와 레이저 전력의 거리별 손실(dB )과 회절현상에 기 인한다. 이러한 요인은 교량의 3차원 변위를 산출하는데 있어 큰 오차요인이 될
5 .4 3차 원 변 위 측 정 실 험
그림 5.18과 그림 5.19의 각 축에 대한 실험에서 정확도는 1 m m 이하, 오차 는 0.67 mm 이며, 고정도 상대 측정 알고리즘과 고속 영상 검출기법 등을 적용 하였고, 실내 5 m 거리에서 측정하고, 이동 시뮬레이터를 1 m m씩 움직이면서 변위 측정 실험을 하였다.
그림 5.18 x 축 측정 값
그림 5.19 z축 측정 값
그림 5.20, 5.21, 5.22는 각 축을 개별적으로 37회 반복 실험한 것이다. 측정 실험 조건은 실내의 5 m 거리에서 이동 시뮬레이터를 50 m m로 반복 측정한 값이고, 불확도 범위는 0.3 ~ 0.67 mm 이다.
그림 5.20 x 축의 50 mm 이동한 반복 실험
그림 5.21 y축의 50 m m 이동한 반복 실험
그림 5.22 z축의 50 m m 이동한 반복 실험
5 .5 V i s u al GU I 알 고 리 즘 전 체 구 성 도
실제 사용자의 편의를 위하여 본 논문에서는 전체 시스템운용을 위한 프로그 램 툴(t ool)을 개발하였다.
그림 5.23 레이저 및 CCD 카메라를 이용한 3차원 변위 측정 Visual 프로그램
그림 5.23의 A의 St art 버튼을 누르면 각 LE D의 픽셀 위치정보를 디스플레 이 해준다. B 버튼을 누르게 되면 영상을 얻을 수 있게 되며, C버튼은 레이저 의 위치를 디스플레이 하게 된다. D의 카메라 Control 버튼은 카메라 옵션을 변
클릭 했을 경우 나타나는 그림이다. 3차원 이동 추적이 시각적으로 관찰 가능하 다.
그림 5.24 좌표 변위의 디스플레이 프로그램
Ⅵ . 결 론
본 논문에서는 레이저를 이용한 대형구조물의 3차원 거동 측정에 대한 새로 운 방식을 제안하였다. 주된 알고리즘은 고정도 상대 측정 알고리즘으로 block m at ch in g , 보간법, adj acent av er ag e, 중심픽셀을 구하는 과정이 포함 되어있 다. 본 논문은 기존에 존재하는 대형구조물의 안전감시 시스템 보다 경제적이 고, 설치 및 측정이 간단하다. 3차원 거동의 정확성이 수 m m 이하의 정확성을 유지하고, 3차원 거동의 불확도는 0.3 ~ 0.67 mm 이다. 영상을 이용한 방법으 로 종합적인 거동 모니터링이 가능한 장점을 갖고 있다. 본 논문은 실험을 위 해 직접 3차원 이동 시뮬레이터와 레이저 받침대를 제작하였고, 이동 시뮬레이 터와 CCD 카메라는 원격 제어가 가능하도록 사용자 인터페이스를 향상 시켰 다. 또한 제어가 가능하도록 GUI (Gr aphic U ser Int erface) 프로그램을 작성하 였다. 기준 LED와 레이저빔 사이의 픽셀간 거리를 이용하여 3차원 거동을 판 별하며, 레이저는 3개를 이용하여 기하학적인 원리로서 거동 측정을 하게 된 다. 시설물의 진동 주파수는 대형구조물의 피로누적이나 안전 상태에 중요한 판단 자료가 되므로 본 논문에서도 진동주파수 측정 방식과 평가 방법을 제안 하였다. 본 논문의 진동주파수 측정 불확도는 0.5 % 이내이다. 진동주파수 측 정 범위를 향상시키기 위해서는 고속 카메라를 이용하여 그 범위를 넓힐 수 있고, 본 논문의 실험에서는 0 ~ 15 H z 까지 진동주파수 측정 범위를 가지고 있다. 대형 구조물의 거동 측정에 새로운 방식을 제안한 본 논문은 앞으로 시 설물 안전감시 시스템으로 각광을 받을 부분이고, 현재 레이저를 이용한 3차원 거동 시스템의 새로운 방향을 제시하였다.
부 록 A
이 동 시 뮬 레 이 터
D OI (D im e n s io n O p e ra tin g In t e rf a c e ) P o s it io n in g T ab l e 사 용 방 법
1 . 사 양
1) X축 이동거리 : 600 m m 2) Y축 이동거리 : 600 m m 3) X축 이동속도 : 35 m m/ s ec 4) Y축 이동속도 조절 : 1~50 m m/ s ec
5) 해상도 : Y축 - 0.025 m m , X축 - 0.0125 m m 6) 표시단위 : 위치 - m m , 속도 - m m/ sec
7) 이동속도 편차 : 1 %
2 . 기 능 1) 수동조작
화살표를 눌러 테이블의 위치를 이동 2) 명령으로 조작
- GOT O X , GOT O Y 명령으로 X축, Y축의 좌표를 지정하여 이동 - M OVE X , M OVE Y 명령으로 X축, Y축의 좌표를 지정하여 이동
- A UT O 명령으로 Y축의 두 점과 속도를 지정하여 두 점 사이를 왕복운동 - P osition 1, P osition 2 명령으로 현재의 Y축 위치를 A UT O 명령으로 왕
복할 지점으로 지정
3 . 버 튼
1) 시작 : 파라미터 선택모드/ 숫자입력모드로 전환, 명령실행 2) 정지 : 실행중지, 리미트 에러시 명령선택모드로 복귀
3) 원점 : X , Y축 원점으로 이동 4) 수동/ 자동 : 수동모드, 명령선택모드 전환
5) 위화살표 (▲) : 위로 이동, 명령선택, A u t o 명령시 파라메터 선택, 숫자입 력시 증가
6) 아래화살표 (▼) : 아래로 이동, 명령선택, A ut o 명령시 파라메터 선택, 숫 자입력시 감소
7) 왼쪽화살표(◀) : 좌로 이동, 명령선택모드/ 파라미터선택모드로 복귀, 숫자입 력시 입력 자리선택
8) 오른쪽화살표(▶) : 우로 이동, 파라미터선택모드/ 숫자입력모드로 전환, 숫자 입력시 입력 자리선택
4 . 수 동 모 드
1) 수동/ 자동 버튼으로 토글된다.
2) 위, 아래, 왼쪽, 오른쪽 화살표로 각각 위로(Y축 +), 아래로 (Y축 - ), 우로(X 축 +)이동하며, 이 때 X축, Y축의 위치가 각각 0.1 m m 단위로 표시된다.
3) 각 화살표를 짧게 한번 누르면 x 축은 0.0125 m m , Y축은 0.025 m m 단위로 이동하며, 계속 누르고 있으면 연속적으로 이동한다.
5 . 명 령 선 택 모 드
1) 수동/ 자동 버튼으로 토글된다.
2) 위, 아래 화살표로 명령을 선택하며, 위 화살표로는 A UT O, GOT O X , GOT O Y , M OVE X , M OV E Y , P OS IT ION 1, P OS IT ION 2의 순으로 아래 화 살표로는 위 화살표로 선택할 때에는 역순으로 선택된다.
3) 명령선택모드에서 S t ar t 버튼 또는 오른쪽 화살표를 누르면 ; - A UT O 명령에서는 파라미터 선택모드로 전환되고,
6 . 파 라 미 터 선 택 모 드
1) 명령선택모드에서 A UT O 명령을 선택하고 시작 버튼 또는 오른쪽 화살표를 누르면 파라미터 선택모드로 전환된다.
2) P osition 1, P osit ion 2, S peed 중 하나를 위, 아래 화살표로 선택하며, 선택된 파라미터는 반전되어 표시된다.
3) 시작 버튼 또는 오른쪽 화살표를 누르면 숫자입력모드로 전환되고, 왼쪽 화 살표를 누르면 명령선택모드로 복귀한다.
7 . 숫 자 입 력 모 드
1) 좌표 또는 속도를 입력하는 모드로서,
2) 왼쪽, 오른쪽 화살표를 사용하여 입력할 자리를 선택하면 그 자리의 숫자 또 는 부호가 반전된다.
3) 반전된 자리의 숫자 또는 부호는 위, 아래 화살표를 사용하여 입력한다.
4) 반전된 자리가 가장 왼쪽자리일 경우 왼쪽 화살표를 누르면 명령선택모드 또는 파리미터선태모드로 복귀한다.
5) 시작 버튼을 누르면 명령을 실행한다.
8 . 원 점 동 작
원점 버튼을 누르면 X축과 Y축이 각각 원점으로 복귀한다. 동작을 마친 후, 원 점 버튼을 누를 당시에 수동모드였으면 수동모드로, 그렇지 않으면 명령모드로 복귀한다.
9 . 자 동 명 령
1) A UT O 명령을 실행시키면 먼저 P osit ion 1로 이동한 후 P osit ion 2 와 P osit ion 1 사이를 S peed에서 지정한 속도로 왕복 운동한다.
2) 동작을 정지시키려면 정지 버튼을 누른다.
부 록 B
본 논 문 에 서 제 안 한 방 식 의 C 프 로 그 램 S ou rc e
B lo c k M at c h in g 알 고 리 즘
/ / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / double CLa ser Dist an ceDlg ::M at chn es s (im ag e im g , v ect or pos , im ag e t em p ) {
r eg ist er i,j ;
BYT E (*ip )[3],(*T p )[3] ; dou ble er r =0 ;
st at ic in t sav e = 0;
for (j =0;j < t em p .size.Y ;j ++){
ip =im g .p +(pos .Y +j )*im g .size .X +pos .X ; T p =t em p .p +j *t em p .size .X ;
for (i =0;i< t em p .size .X ;i ++){
er r += S QR ( (double ) ((*ip )[2] )- (double ) ((*T p )[2] ));
++T p ; ++ip ; }
}
/ / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / 영 상 정 보 함 수
/ / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / F ILE *fp_r , *fp_g , *fp_b , *fp_b w ;
if (sav e == 0) {
fp_r = fop en ("c :\ \ P ix el_r .dat ","w ");
fp_g = fopen ("c :\ \ P ix el_g .dat ","w ");
fp_b = fopen ("c :\ \ P ix el_b .dat ","w ");
fp_b w = fopen ("c :\ \ P ix el_b w .dat ","w ");
for (j =0;j < im g .size.Y ;j ++){
ip =im g .p +j *im g .size.X ; for (i =0;i< im g .size.X ;i++){
fpr int f (fp_r ,"% d ",(in t )(*ip )[2] );
fpr int f (fp_g ,"% d ",(in t ) (*ip )[1]);
fpr int f (fp_b ,"% d ",(int ) (*ip )[0] );
fpr int f (fp_b w ,"% 4.1f ",
( (double ) (0.11*(*ip )[0] )+(dou ble ) (0.59 *(*ip )[1] )+(double ) (0.3 *(*ip )[2])));
++ip ; }
fpr int f (fp_r ,"\ n ");
fpr int f (fp_g ,"\ n ");
fpr int f (fp_b ,"\ n ");
fpr int f (fp_b w ,"\ n ");
} s av e = 1;
fclos e (fp_g );
fclos e (fp_b );
fclos e (fp_b w );
}
r et u rn er r ; }
/ / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / 보 간 법 을 적 용 하 여 최 소 값 을 찾 는 알 고 리 즘
/ / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / double CLa ser Dist an ceDlg ::F in dM in im u m (in t n , double *er r )
{
int u = 13*n *n + 13 *n - 6 ; int v = n *(n +1)*(2*n +1);
int w = 3 *n *n + 3 *n - 1;
dou ble m 11 = 90.0 / (doub le ) u / (dou ble ) v ; dou ble m 13 = - 15.0 / (double ) u / (2 * n +1);
dou ble m 22 = 3 / (dou ble ) v ; dou ble m 31 = m 13 ;
dou ble m 33 = 3 * w / (2*n +1)/ (double ) u ; dou ble x x y = 0;
dou ble x y = 0;
dou ble y = 0;
y += er r [(2*n +i +1)% (2*n +1)] ; }
dou ble a = m 11 * x x y + m 13*y ; dou ble b = m 22 * x y ;
r et ur n - b / 2 / a ; }
/ / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / 옵 셋 을 찾 는 루 틴
/ / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / dv ect or CL a s er Dist an ceDlg ::fin doff set (im ag e im g , v ect or m v , im ag e t em p ) {
dv ect or r esult ; v ect or cp ; int i;
dou ble *y y ;
in t n = t em p .size.X ;
y y = (dou ble *) m alloc (sizeof (double )*(2*n +1));
for (i = - n , cp .Y = m v .Y ; i < = n ; i++){
cp .X = m v .X + i;
y y [(2*n +i +1)% (2*n +1)] = CL a serDist an ceDlg ::M at ch n es s (im g ,cp ,t em p );
}
F ILE *t em pfile = fopen ("c :\ \ 정기범\ \ La ser Dist an ce\ \ x x .dat ", "w ");
for (i = - n ; i< =n ; i ++)
fclose (t em pfile );
r esult .X = F in dM inim um (n , y y );
fr ee (y y );
n = t em p .size.Y ;
y y = (dou ble *) m alloc (sizeof (double )*(2*n +1));
for (i = - n , cp .X = m v .X ; i < = n ; i++){
cp .Y = m v .Y +i;
y y [(2*n +i +1)% (2*n +1)] =
CL a s er Dist an ceDlg ::M at chn e s s (im g ,cp ,t em p );
}
t em pfile = fopen ("c :\ \ 정기범\ \ La ser Dist an ce\ \ y y .dat ", "w ");
for (i = - n ; i< =n ; i ++)
fpr int f (t em pfile, "%f\ n ", y y [ (2*n +i+1)% (2*n +1)]);
fclose (t em pfile );
r esult .Y = F in dM in im u m (n , y y );
fr ee (y y );
r et ur n r e sult ;
}
부 록 C 식 (4 .12 )의 유 도
식(4.11)의 정의에서 출발하여 n
x = 1
x
2에 대해 구하면 다음과 같다.( x + 1)3- x3 = 3x2+ 3x + 1
위 식에 x 을 1~n까지 대입하면,
23- 13 = 3 12+ 3 1 + 1 33- 23 = 3 12+ 3 1 + 1 43- 33 = 3 12+ 3 1 + 1
n
3- ( n - 1)3 = 3 ( n - 1)2+ 3 ( n - 1) + 1 ( n + 1)3- n3 = 3n
2+ 3n + 1
위 식을 모두 더하면,
( n + 1)3- 13 = 3
[
n
x = 1
x
2] + 3 [n
x = 1
x ] + n
우변의 두 번째항에서 n
x = 1
x 는 자연수의 합이므로 다음과 같이 쓸 수 있다.
n ( n + 1)
2결과적으로 식을 정리하여 풀면,
n
x
2 =n ( 2 n + 1) ( n + 1)
6이 된다. 여기서 우리가 구하고자 하는 식은 n
x = - n
x
m 이므로 짝수 차수인 경우는 2배가되고, 홀수 차수인 경우는 서로 부호가 반대가 되어 상쇄된다.
n
x = - n
x
2 =n ( 2 n + 1) ( n + 1)
3위 식은 식(4.12)의 한 요소가 된다. 같은 방법으로 n
x = - n
x
4도 구할 수 있다.그리고 n
x = - n
x
3,n
x = - n
x 은 0이 된다.
참 고 문 헌
[1] 김병태, 레이저공학 , 상학당, 1999.
[2] A . Y ar iv , Op t ical E lectr on ics , H olt Rin eh ar t an d W in st on In c., 1985.
[3] Gonzalez and Woods, D ig ital I mag e P rocess ing , Green, pp. 581 - 669, 1998.
[4] 장 수, 조재흥, 광 학, 대웅출판사, pp . 781 - 804, 1998.
[5] 이승석, 김영길, 최재우, V is ion S y s t em , 한국표준과학연구원, 1998.
[6] W. K. Pr att , D ig ital I mag e P rocess ing , Wiley - Inter science, New York, 1991.
[7] A. K. Jaqin, F undam entals of D ig ital I mag e P rocessing , Prentice- Hall, 1989.
[8] R. J. Schalkoff, D ig ital I mag e P rocess ing and Comp uter Vision, John Wiley
& S on s , N ew Y or k , 1989.
[9] 임제탁, 이두수, 이산신호처리 , 대영사, 1994.
[10] A . H . Zem an ian , D is tr ibu tion T he ory an d T ransf orm A naly s is ; A n
I n trod uct ion to Gen e raliz ed F un ction w ith A pp lica t ion , M cGr a w - H ill,
N ew Y or k , 1965.[11] A . I. Zv er ev , H and b ook of F ilt er S y n th es is , J ohn W iley & S on s , N ew Y or k , 1967.
[12] A . V . Oppen h eim an d R . W . S ch afer , D ig ital S ig nal P r oces s ing , P r ent ice - H all, E n glew ood Cliffs , N J , 1975.
[13] 김희승, 영상인식 , 생능출판사, 1993.
A b s t ra c t
A Study on the T hree - Dimensional Behav ior Measurement of Large - size Construction U sing a Laser
by K i- B um J ung
D ep t. of E le ctron ics E ng in e e ring Grad ua t e S chool, K ook - M in Un iv ers ity
S e oul, K or ea
In t his paper , a m et h od for th e t hr ee - dim en sion al b eh av ior m ea sur em en t is pr op osed t o p er for m th e accu r at e m ea su r em ent of dist an ce accor din g t o lig ht spot s for m ed on t h e sur face of an obj ect plan e. T h e pr op os ed alg or it hm com pr ises t hr ee la ser s an d a cam er a . W e m ak e u se of t h e la ser ' s pr op er ty of st r aig ht n e s s an d a s em icon du ct or la s er t h at h a s a m inim u m of flu ct u at ion .
W e calculat e t h e pix el dist an ce on t h e im ag e b et w een la s er b eam an d LE D capt ur ed by a CCD cam er a . A ft er g ain in g t h e im ag e on t h e obj ect plan e, w e apply t h e r elativ e m ea sur em en t alg or it hm t o th e pr op os ed alg or ith m t h at is com pr ised of in t erp olat ion , block m at chin g , an d adj acen t av er ag e m et h ods . U sin g t his m eth od , t h e pr ecis e m ea sur em en t of
w it hin appr ox im at ely 0.5 % . T h er efor e, th e pr oposed alg or it hm en ables th e th r ee - dim en sion al b eh av ior m ea su r em ent t o b e im plem ent ed w it h high pr ecision in a sim ple an d econ om ical w ay .