㍌㿜# ⽸⨸☝ヌ# ー〱㻤# ីᙌᛴㇸ# ㄘᵡ⪬ᙌ# ⱤⰬ㫤#
洊滊歊†, 決汾笾*, 焮渂竒**
An Automatic Design System of Mechanical Structure Using Evolutionary Computation
Jin-Wan Jeon
†, In-Ho Lee
*, Joo-Heon Cha
**Key Words : Evolutionary Computation, Genetic Algorithm(GA), Elementary Cell Block(ECB), ABSTRACT
In mechanical design, design process is mainly composed of design, explanation and evaluation. In this paper, Using Genetic Algorithms (GA), Evolutionary computation is introduced as new design process. This method promote the efficiency and power of design. Due to the known characteristics of the stage, the approach basically involves a synthetic design method with the composition of building blocks representing the elements of mechanical objects. In order for the building blocks to be more suitable for representation and evolution of mechanical structures, Elementary Cell Blocks (ECBs) are introduced as new building blocks. In this paper, we have demonstrated the implementation of the approach with the design of gear systems.
1. 昢嵦
20 ㎎₆㠦 㩧㠊✺Ⳋ㍲ 䅊䜾䎆㦮 ỿ䞲 㩚㦒
⪲ Ὃ䞯㠦㍲⓪ 㧊⯒ 㧊㣿䞲 㡆ῂ✺㧊 ἶⶊ㩗㧎 ㎇ ὒ⯒ ⽊㧊₆ 㔲㧧䟞┺. ➆⧒㍲, ₆Ἒ㍺Ἒ 㟒㠦 㧞㠊 䅊䜾䎆⯒ 㧊㣿䞲 㧦☯䢪 ㍺Ἒ⓪ ㌆㠛 㠪㰖┞
㠊✺㠦Ợ 㭧㣪䞲 㧊㓞 㭧 䞮⋮⪲ 㧦Ⰲ 㧷ἶ 㧞┺.
Ὃ䞯㩗 ㍺Ἒ㠦㍲㦮 㧦☯䢪 ㍺Ἒ⓪ 㡂⩂ ┾Ἒ⯒
Ỏ䂲 ⽋㩗㧎 ὒ㩫㦒⪲ ῂ㎇♮₆ ➢ⶎ㠦 㾲㩗㦮
㍺Ἒ⯒ 㥚䟊㍲⓪ ⁎ ⽋ 䣵㑮⯒ 㭚㧊⓪ ộ(㾲㩗 䟊⯒ 䟻䞲 ザ⯎ 㑮⪊)㧊 Ṗ㧻 㧊㌗㩗㧎 ㍺Ἒ ⻫
㧊⧒ 䞶 㑮 㧞┺.(1)
㧒㩗㦒⪲ٻ㍺Ἒὒ㩫㦖ٻ䋂Ợٻڏ Ṗ㰖⪲ٻ⋮③ٻ㑮ٻ 㧞┺ډٻṲ⎦㍺Ἒ㢖ٻ₆⽎㍺Ἒڇٻ㌗㎎㍺Ἒ㢖ٻ㌳㌆Ṗٻ
⪲ٻ⁎ộ㧊┺ډٻṲ⎦㍺Ἒ㢖ٻ₆⽎㍺Ἒ⯒ٻ⽊䐋ٻ㺓㦮 㩗ٻ㍺Ἒ㦮ٻ⻪㭒⪲ٻ⽒ٻ㑮ٻ㧞ἶڇٻ㌗㎎㍺Ἒ㢖ٻ㌳㌆㍺
Ἒ⯒ٻ㩫䡫㩗ٻ㍺Ἒ㦮ٻ⻪㭒⪲ٻ⽒ٻ㑮ٻ㧞┺ډٻ㰖⁞₢㰖 㦮ٻ㩫䡫㩗ٻ㍺Ἒ㠦㍲⓪ٻ䅊䜾䎆⯒ٻ㧊㣿䞲ٻ㍺ἚṖٻ㑮 䟟♮㠊ٻ㢪㰖Ⱒٻ㺓㦮㩗ٻ㍺Ἒ㠦㍲⓪ٻ䅊䜾䎆⯒ٻ㧊㣿 䞲ٻ㍺ἚṖٻ㧊⬾㠊㰖㰖ٻ㞠㞮┺ډٻ➆⧒㍲ٻ⽎ٻ⏒ⶎ㠦
㍲⓪ٻ㺓㦮㩗ٻ㍺Ἒٻ㡗㡃㠦ٻ䅊䜾䎆⯒ٻ㧊㣿ڇٻ₆Ἒῂ
㫆 㦮 ٻ 㧦 ☯ 䢪 ٻ 㔲 㓺 䎲 㦚 ٻ ῂ 㿫 䞮 ἶ 㧦 ٻ 䞲 ┺ ډٻ 㧦☯䢪ٻ ㍺Ἒ㦮ٻ 㭒㣪ٻ 㩧⁒⻫㦒⪲ٻ 㧎Ὃ㌳ⳛٻ (Artificial Life: AL)ὒٻ 㰚䢪ٻ 㡆㌆⻫(Evolutionaryٻ Computation)❇㧊ٻ 㡆ῂ㠦ٻ 㧊㣿♮㠊ٻ 㢪ἶٻ ⽎ٻ ⏒ⶎ 㠦㍲☚ٻ㧊⩂䞲ٻ₆⻫✺㦮ٻṲ⎦㦚ٻ₆㦒⪲ٻ䞲ٻ㡆ῂ 㦮ٻ㑮䟟㦚ٻ㩲㞞䞲┺ډٻٻ
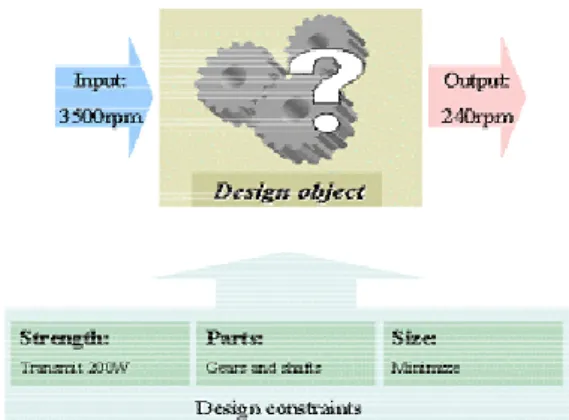
⽎ٻ⏒ⶎ㠦㍲⓪ٻ㧦☯䢪ٻ㍺Ἒ㦮ٻ╖㌗㦒⪲ٻڍ Ṗ㰖ٻ
㌂⪖㡆ῂ⯒ٻٻ䐋䞲ٻGear System 㦚ٻ⁎ٻ㡞⪲ٻ⽊㡂㭖
┺ډٻ㼁ٻ⻞㱎ٻ㌂⪖㡆ῂ㠦㍲⓪ٻGear System 㦮ٻ㿲⩻ٻ 䣢㩚㑮⯒ٻ2 Ṗ㰖ٻ⻫㦒⪲ٻ䘟Ṗ䞮ἶٻṗṗ㦮ٻ䣾㥾
㎇㠦ٻ╖䟊㍲ٻ⏒㦮ٻ䞶ٻộ㧊Ⳇڇٻ⚦ٻ⻞㱎ٻ㌂⪖㡆ῂ㠦
㍲⓪ٻ㼁ٻ⻞㱎ٻ㌂⪖㡆ῂ⯒ٻ䌫㦒⪲ٻ㔲㓺䎲㦮ٻὋṚ 㩗ٻṲ⎦㦮ٻ䢫㧻㦚ٻ㩲㔲䞶ٻộ㧊┺ډٻٻ
ٻ
2. 櫶割 愶凃 愕 徯洇 2.1 汾击 旣律
㧎Ὃ㌳ⳛ㦖ٻ1948 ⎚ٻ䠳ṖⰂٻ㿲㔶㦮ٻ⹎ῃٻ㑮䞯 㧦ٻJohn. Forn noyman 㦖ٻ㌳ⳛ㼊㦮ٻ⽎㰞㩗ٻ䔏㰫ٻ㭧ٻ 䞮⋮㧎ٻ 㧦₆ٻ 㯳㔳ٻ ₆⓻㧊ٻ ₆Ἒ㠦ٻ 㦮䟊㍲☚ٻ 㔺䡚ٻ
♶ٻ㑮ٻ㧞┺⓪ٻộ㦚ٻ㧊⪶㩗㦒⪲ٻ㯳ⳛ䞾㦒⪲㖾ٻ╖⚦
♮₆ٻ 㔲㧧䞮Ⳋ㍲ٻ 㧎Ὃ㌳ⳛ㠦ٻ ╖䞲ٻὖ㕂㧊ٻ 㯳䙃♮
㠞㰖Ⱒٻ⁎ٻ䤚⪲ٻ㡆ῂ㧦✺㦮ٻ㌗╏㑮Ṗٻ㔺㣿㩗㧎ٻ
㟒㠦ٻ 㡊㭧㦚ٻ 䞮Ⳋ㍲ٻ ὖ㕂㧊ٻ 㭚㠊✺㠞┺. ⁎⩂⋮, 1987 ⎚ ⹎ῃ㦮 Christopher Rangton 㧊 Ṳ㾲䞲 㤢 䋂 㑣㠦㍲ 㧎Ὃ㌳ⳛ㦚 "㤆ⰂṖ 㞢ἶ 㧞⓪ ㌳ⳛ (life as we know)"㦮 ὖ㩦㠦㍲ "㧞㦚 㑮 㧞⓪ ㌳ⳛ
† ῃ⹒╖䞯ᾦ ╖䞯㤦 ₆Ἒ㍺Ἒ䞯ὒ E-mail : [email protected] TEL : (02)910-5038
* 䞲㟧╖䞯ᾦ ╖䞯㤦 ₆Ἒ㍺Ἒ䞯ὒ
** ῃ⹒╖䞯ᾦ ₆Ἒ㧦☯㹾Ὃ䞯
(life as it could be)"㦒⪲ 㦮⹎⯒ 䢫㧻, ㌳ⳛ㼊㦮 䔏
㎇㦚 ⋮䌖⌊⓪ 䟟☯㦚 ⽊㡂㭒⓪ 㧎Ὃⶒ㦚 㡆ῂ䞮
⓪ ộ㧊⧒ἶ 㩫㦮䞮Ⳋ㍲ 㧎Ὃ㌳ⳛ㦖 㩚₆⯒ ⰴỢ
♮㠞┺. 䢲䞲 㡆ῂ㢖 䞾℮ 㧎Ὃ㌳ⳛ㦖 20 ㎎₆ 䤚㠦 㩧㠊✺Ⳋ㍲ Computer Graphic Animation 㠦
㍲䎆 Cellular Automata 㠦 㧊⯊₆ ₢㰖 ┺㟧䞲
⻫㦒⪲ Computer Science 㢖 ὖἚ♮㠊 㢪┺. 2001
⎚㠦⓪ ☛㧒㦮 F.R Miranda ⓪ 䅊䜾䎆⯒ 㧊㣿䞮㡂 Cognitive animated character(㧎㔳⩻㦚 Ṗ㰚 㧎Ὃ㦮
㌳ⳛ)⯒ 㩲㞞䞾㦒⪲㖾 ⁎ 䣾⩻㦚 㯳ⳛ䞮㡖┺. ➆
⧒㍲ 㧎Ὃ㌳ⳛ㦮 ₆⽎ ⳿㩗㦖 䅊䜾䎆⯒ 㧊㣿䞮㡂 ῂ䡚䞶 㑮 㧞⓪ ộ㧊┺.ٻٻ
ٻ
2.2 滊筚 櫶斶憛
㰚䢪ٻ 㡆㌆⻫㧊⧖ٻ ┺㥞㦮ٻ 㰚䢪⪶ڇٻ 㯟ٻ 㩗㧦㌳㫊 ὒٻ㧦㡆㍶䌳㦚ٻ䐋䞮㡂ٻ⽊┺ٻ㤆㑮䞲ٻṳ㼊Ṗٻ㌊㞚⋾
⓪ ┺⓪ ⻫䂯㠦 ₆㦚 ⚪ 䅊䜾䎆 ₆⻫㦚 Ⱖ䞲┺.
㰚䢪 㡆㌆⻫㦖 ⁎ ⻫⪶㠦 ➆⧒ 㥶㩚㧦 㞢ἶ Ⰲ㯮(Genetic Algorithm: GA), 㰚䢪 䝚⪲⁎⧮
(Evolutionary Programming), 㰚䢪 㩚⨋(Evolution Strategies)㦒⪲ ⋮③ 㑮 㧞┺.
╖㦮 㰚䢪 㡆㌆⻫㦖 ㍶㌳-䤚䘟Ṗ 㔳㦒
⪲ 㾲㩗䢪⯒ 㥚䟊 ㌂㣿♲┺. ╖㦮 㰚䢪 㡆㌆
⻫㦖 ☯㔲㠦(in parallel) Ⱔ㦖 Pareto-optimal Solution 㠦 ╖䞲 䌦㌟㦚 䞶 㑮 㧞┺. 㧊⩂䞲 䔏㰫㧊 ┺⳿
㩗 㾲㩗䢪⯒ 䟊ἆ䞮⓪◆ 㧞㠊㍲㦮 㧻㩦㧊⧒ 䞶 㑮 㧞┺.(7) 㰚䢪 㡆㌆⻫㦮 Ṳ⎦☚⓪ Fig.1 ὒ ṯ┺.
ڢڜ ⓪ٻڌڔڒڐ ⎚ٻ⹎ῃ㦮ٻᾦ㥷䞯㧦ٻڥۊۃۉٻڣۊۇۇڼۉڿ Ṗٻٻ ڢڜ ⯒ٻὒ䞯ὒٻὋ䞯㠦ٻ㩗㣿㔲䌊㦒⪲㖾ٻ㯳ⳛ䟞┺ډڃڍڄٻٻ
GA 㡃㔲 䅊䜾䎆㦮 㩚㠦 䧮㧛㠊 㤦㑯┾Ἒ㠦
┺┺⧦┺. GA ⓪ ἂ㔺䞲 㾲㩗䢪 㞢ἶⰂ㯮㧊㰖Ⱒ, 1 㹾㤦㦮 ┾㑲䞲 ῂ㫆⪲ ῂ㫆㩗 䢫㧻㧊 㠊⪋┺⓪ ┾ 㩦㦚 Ṗ㰖ἶ 㧞┺.
࣯࣪ࣜ洇殯ࣜ匶憛ࣜ
⽎ 㡆ῂ㠦㍲⓪ 㰚䢪 㡆㌆⻫㦮 䞮⋮㧎 㥶㩚㧦 㞢ἶⰂ㯮㦮 Ṳ⎦㦚 ₆⽎㦒⪲ 䞲 䢫㧻♲ Ṳ⎦㦮 㰚 䢪 㡆㌆⻫㦚 㩗㣿䞲┺.
3.1 氦洊 橒処庲溞
㥶 㩚 㧦 㞢 ἶ Ⰲ 㯮 㦖 ἓ 㨗 㧊 㫊 㨂 䞮 ⓪ 䢮 ἓ
㏣㠦㍲ ṫ䞲 㤆㎇㦮 Ṳ㼊⓪ ㌊㞚⋾ἶ 㟓䞲 㡊㎇㦮 Ṳ㼊⓪ٻ☚䌲ٻ♲┺⓪ٻDarwin 㦮ٻ㩗㧦G ㌳㫊㦮ٻ⻫䂯 (Survival of the fittest)㦚ٻٻ₆⽎ٻṲ⎦㦒⪲ٻ䞲┺ډٻٻٻ
G
Fig. 1 The Concept of Evolutionary computation
ⶎ㩲㦮ٻPotential Solution 㦖ٻṗٻṲ㼊Ⱎ┺ٻ㫊㨂ٻ Ṗ㩫䞮ἶٻ ⁎ộ✺㦖ٻ 䕢⧒⹎䎆㦮ٻ ㎎䔎⪲ٻ 䚲䡚䞲┺ډٻ 䕢⧒⹎䎆⓪ٻ㧦㡆Ἒ㠦ٻ㫊㨂䞮⓪ٻ㡒㌟㼊㦮ٻ㥶㩚㧦⯒ٻ
╖㔶䞮ἶٻ2 Ṗ (Binary)䡫䌲㦮ٻStringٻṨ㠦ٻ㦮䟊ٻῂ 㫆䢪 ♲┺.(4) 㧒㩗㦒⪲ Fitness Value ⪲ 㞢⩺㰚 ⳛ䢫 䞲 䟊⓪ ⶎ㩲⯒ 䛖₆ 㥚䞮㡂 㡒㌟㼊㦮
“Goodness"㦮 㩫☚⪲ ⋮䌖⌊ἶ 㧊 Ṩ㧊 㔺㩲㦮 Ṩὒ ⁒㩧䞮Ợ ὖἚ䞲┺. 㥶㩚㩗 㰚䢪⯒ 䐋䟊
㍲ Fitness Value Ṗ ⏨㦖 㡒㌟㼊⓪ ⶎ㩲㠦 㧞㠊
㍲ ▪ ⋮㦖 㧦㏦㦚 ㌆㿲䞮⩺⓪ ἓ䟻㦚 Ṗ㰚┺.
㰚䢪 ὒ㩫㦒⪲ Ⰲ⓪ 㥶㩚㧦 㫆㧧㦮 ṗ ㌂㧊 䋊㦖 ┺㦢 ㎎╖Ṗ 䡚 Ṳ㼊ῆ㦮 㡒㌟㼊⪲
䎆 㺓㿲♲┺. ⳾ ㎎╖㦮 㥶㩚㧦⓪ ┺㦢 ㎎╖
㦮 㧦㏦ ㌳㌆㦚 㥚䟊 䢒䞿♮ἶ 㨂ἆ䞿 䞲┺. 㧊 ộ㦖 Fitness Value Ṗ ▪ ⏨㦖 㡒㌟㼊Ṗ ▪ Ⱔ 㦖 㑮㦮 㧦㏦㦚 ㌳㌆䞲┺⓪ ộ㦚 㰚䢪㦮 ὒ㩫㦒
⪲䎆 㡞ἂ䞶 㑮 㧞ἶ ⁎⪲ 㧎䟊 㩗㧦 ㌳㫊㦮 ⻫ 䂯㦚 䐋䟊 ┺㦢 ㎎╖㠦㍲ ▪ ⏨㦖 ㌳㫊 Ṗ⓻㎇
㦚 Ṗ㰞 㑮 㧞┺⓪ ộ㦚 㦮⹎䞲┺.
㰚䢪 ㌂㧊䋊㦖 㤦䞮⓪ 㾲㫛 ₆㭖㠦 ┺┺⯒ ➢
₢㰖 ⽋♲┺. 㧊 ₆㭖㦖 ṗ ㎎╖ ㌂㧊㦮 ṗ ⼖ 䢪㦮 㟧, 䢏㦖 㩗䞿㎇㦮 ⹎Ⰲ 㩫㦮♲ Ṩ, 㞚┞Ⳋ 㰚䢪 ㌂㧊䋊㦮 㑮 ❇㠦 㦮䟊 ἆ㩫♲┺.
㥶㩚㧦 㞢ἶⰂ㯮㦖 㰚䢪 ㌂㧊䋊㦮 㽟㰚㦚 㥚䞮㡂
┺㦢 3 Ṗ㰖 ₆⽎㩗㧎 㫆㧧㧊 㣪ῂ♲┺.
ٻ
ൟٻ㨂㌳㌆ (Reproduct) String
൯ 㧊 Ṗ㰖⓪ 㩗䞿☚㠦 ➆⧒ ⁎ String 㦚
⽋㩲䞮⓪ ὒ㩫. 㯟, 㤆㎇ Ṳ㼊ῆ(⏨㦖 Fittness Value ⯒ Ṗ㰖⓪)㦚 ⽋㩲䞮㡂 㡊㎇ Ṳ㼊ῆ㦚 㠜㞶 ἶ 㧊⯒ 㡊㎇ Ṳ㼊ῆ㦮 㧦Ⰲ㠦 ╖㔶䞾
൯ٻṲ㼊ῆ㦮ٻ䋂₆⓪ٻ㩚㼊ٻ㰚䟟ὒ㩫㦚ٻ䐋䟊㍲ٻ┺㟧 䞮㰖ٻ㞠₆ٻ➢ⶎ㠦ٻ㨂㌳㌆♲ٻṲ㼊ῆ㦮ٻ䋂₆㢖ٻ㩲Ệٻٻ
♲ٻṲ㼊ῆ㦮ٻ䋂₆⓪ٻ☯㧒(Fig. 2)ٻٻ
G G G G G G
G
Fig. 2 Subpopulation of Reproduct
ൟٻᾦ⺆ٻ(Crossover)ٻٻ
൯ٻڍ Ṳ㦮ٻṲ㼊Ṛ㦮ٻ㡒㌟㼊⯒ٻ㩗㦒⪲ٻᾦ䢮䞾 㦒⪲㖾ٻ㌞⪲㤊ٻṲ㼊⯒ٻ㌳㎇ٻٻ
ٻ
൯ٻṲ㼊Ṛ㦮ٻ㩫⽊ٻᾦ䢮ὒٻ㫡㦖ٻ㓺䔎ⰗⰢ㦚ٻἆ䞿䞾 㦒⪲ٻ㩗䞿☚Ṗٻ⏨㦖ٻṲ㼊✺㦚ٻザ⯊Ợٻἆ䞿ٻṖ⓻ٻٻ ٻ
ൟ ☢㡆⼖㧊 (Mutation)
൯ ⳾㰧┾㠦 ㏣䞲 Ṳ㼊ῆ㦮 㥶㩚㧦 Ṩ㦚 ⼖ἓ䞾㦒
⪲㖾 ㌞⪲㤊 㩫⽊⯒ 㩲Ὃ
൯ 㰖㡃㩗 䌦㌟㠦㍲ ὧ㡃㩗 䌦㌟㦒⪲ 䢫╖
┾, ☢㡆⼖㧊Ṗ 㧒㠊⋶ 䢫⮶㦖 1%⹎Ⱒ
ᾦ⺆㢖 ☢㡆⼖㧊㠦 ╖䞲 㡞⓪ Fig. 3 ὒ Fig. 4 㠦 ㍲ ⽊㡂㭒ἶ 㧞┺.
ࣰ࣪ࣜ柢枪癢ࣜ割昷 4.1 柢枪癢汞 匶懾割浶
⽎ 㡆ῂ㠦㍲ 㩲㞞♮⓪ 䝚⩞㧚㤢䋂㠦⓪ Ṗ㧻 ₆
⽎㩗㧎 㣪㏢⪲ 㫊㨂䞮⓪ ECB (Elementary Cell B l o c k ) ⧒ ⓪ な ⪳ 㣪 ㏢ Ṗ 㧞 ┺ . ECB ⓪ Mechanical ῂ㫆⯒ ㍺Ἒ䞮₆ 㥚䞲 㣪㏢
⪲㖾 㰚䢪 㡆㌆⻫㠦 Building Block 㦮 㡃䞶㦚 㑮䟟 (㧒ῆ㦮 䟊)䞲┺.
ṗṗ㦮ٻڠڞڝ ✺㦖ٻ㰚䢪ٻٻ㡆㌆⻫㦮ٻٻṲ⎦㦚ٻ㧊㣿䞮 㡂 ㌳㦚 㔲㧧䞮ἶ 䘟Ṗ㢖 ㍶䌳㦮 ὒ㩫㦚 Ệ㼦㍲
ṗṗ㦮 㩗䞿☚㠦 ➆⧒ 㤆㑮䞲 ECB ⓪ ㍶䌳♮㠊㰖 ἶ 㧊✺㦖 ┺㔲 㨂㌳㌆㦮 ὒ㩫㦚 䐋䟊 䤚 ㎎╖㠦 㫖 ▪ 㤆㑮䞲 䟊⯒ Ⱒ✺㠊 ⌊☚⪳ 㥶☚䞲┺.
ἆῃ, ⽎ 䝚⩞㧚㤢䋂㠦㍲ Ⱒ✺㠊㰖⓪ 㧎Ὃ㦮 ㌳ⳛ 㼊✺㦖 㧦㡆Ἒ㠦㍲㦮 ㌳ⶒ✺㧊 ㎎䙂㦮 㫆䞿㦒⪲
䞮⋮㦮 ㌳ⳛ㦚 Ⱒ✺㠊 ⌊⓪ ộὒ Ⱎ㺂Ṗ㰖⪲ ECB
⪲ 㩫㦮䞲 ₆⽎ 㣪㏢✺㧊 ㎎䙂㦮 㡃䞶㦚 ╖㔶 䞮
⓪ ộ㧊┺.
㧎Ὃ㦮 ECB ✺㦖 ╖㌗㧊 ♮⓪ 㔺㩲 ₆Ἒ䛞 㦮 ⳾✶ 㩫⽊⯒ 㔺㩲⪲ Ṗ㰖ἶ 㧞㠊㟒 䞲┺. Fig. 5 㦖 ₆⽎ ECB 㦮 ῂ㫆㢖 ECB Ṗ Ṗ㰖ἶ 㧞⓪ 㩫
⽊✺㦚 ⋮䌖⌎┺.
ECB ⓪ ⁎Ⱂὒ ṯ㧊 䕢⧒⹎䎆, 䞾㑮, Ṗ㌗ 㫆ٻ
G
Fig. 3 Example of Crossover
G
Fig. 4 Example of Mutation
㧎䔎㦮 3 㫛⮮㦮 㧎㧦⪲ ῂ㎇♲┺. ṗṗ㦮 㧎㧦⯒
ῂ㼊㩗㦒⪲ ㍺ⳛ䞮Ⳋ ┺㦢ὒ ṯ┺.
ٻ
ൟ 䕢⧒⹎䎆 (Parameter)
൯ 㔺㩲 ╖㌗ 䛞㦮 䂮㑮㢖 ㏣㎇ ❇㦮 㩫⽊
ൟ 䞾㑮 (Function )
൯ ECBṖ Ṗ㰖⓪ ṗ㫛 ₆⓻㦚 㩫㦮 ൟ Ṗ㌗ 㫆㧎䔎 (Virtual Joint)
൯ٻ╖㌗ٻ䛞✺㧊ٻṖ㰖⓪ٻἶ㥶䞲ٻ㫆Ⱃ⻫䂯㦚ٻ㩫㦮ٻ ٻ
ࣰ࣮࣪ࣜ割浶汞ࣜ微塾廇ࣜ
⽎ٻ䝚⩞㧚㤢䋂㦮ٻ₆⽎ٻṲ⎦㦖ٻ㍲⚦㠦㍲ٻ㠎 䞲ٻ ộ㻮⩒ٻ㥶㩚㧦ٻ㞢ἶⰂ㯮㦮ٻṲ⎦㦚ٻ㧊㣿䞮㡖㰖Ⱒٻ
⽎ٻ㡆ῂ㠦㍲⓪ٻ₆㫊㦮ٻ㥶㩚㧦ٻ㞢ἶⰂ㯮ٻ⽊┺ٻ㫖ٻ
▪ ٻ 䢫 㧻 ♲ ٻ Ṳ ⎦ 㦮 ٻ 㰚 䢪 ٻ 㡆 ㌆ ⻫ 㦚 ٻ 㩲 㔲 䞲 ┺ ډٻ
⽎ ⏒ⶎ㠦㍲ 㩲㔲䞮⓪ 㰚䢪 㡆㌆⻫㧊 Ṗ㰖⓪ 䔏㰫 㦖 ₆㫊㦮 㥶㩚㧦 㞢ἶⰂ㯮㦖 Binary Code 㦮 2 㰚
⻫㦚 ㌂㣿䞾㦒⪲㖾 な⪳ 䞮⋮ ╏ 㻮Ⰲ䞮⓪ 㩫
⽊㦮 㟧㧊 ┾㑲䞲 Ⳋ㠦 ECB ⧒⓪ な⪳㦚 㧊㣿 䟊㍲ ┺㹾㤦㩗㧎 㩫⽊⯒ Ṗ㰞 㑮 㧞┺⧒⓪ 㧻㩦㦚 Ṗ㰖ἶ 㧞┺. ⡦䞲, 㥶㩚㧦 㞢ἶⰂ㯮㦖 1 㹾㤦㦮 ἶ㩫♲ Binary Code ⪲ ῂ㫆⯒ 䚲䡚䞮₆ ➢ⶎ㠦 ῂ 㫆㩗㦒⪲☚ ┾㑲䞲 Ⳋ㠦 ECB ⓪ ┺㹾㤦㦮 Ṗ㌗
㫆㧎䔎⯒ Ṗ㰦㦒⪲㖾 ┺㟧䞲 ῂ㫆㩗 䚲䡚㦚 䞶 㑮 Ṗ 㧞┺.
l j i
h i
G Fig. 5 Conceptual Architecture of An ECB
4.3 滊筚汞 愯憛
㫖ٻ▪ٻ㾲㩗㦮ٻ䟊⯒ٻ㠑₆ٻ㥚䟊㍲⓪ٻ䟊ὋṚ㦮ٻὧ 㡃㩗ٻ䌦㌟㧊ٻ䞚㣪䞮┺ډٻ㧊㩚㠦ٻ㠎 䞲ٻ㍶䌳ٻὒ㩫 ὒٻ㨂㌳㌆ٻὒ㩫Ⱒ㦒⪲⓪ٻ▪ٻ㫡㦖ٻ䟊⯒ٻῂ䞮⓪ٻٻٻ
◆ 㧞㠊 䞲ἚṖ 㧞₆ ➢ⶎ㠦 㤆Ⰲ⓪ 㫖 ▪ 㾲㩗㦮 䟊, 㯟 ㌞⪲㤊 ṳ㼊⯒ Ⱒ✺㠊 ⌊₆ 㥚䟊㍲ ⡦ ┺
⯎ 㰚䢪㦮 ὒ㩫㦚 䞚㣪⪲ 䞮Ợ ♲┺. ㌞⪲㤊 㰚䢪 㦮 ⻫㦒⪲㖾 ῂ㫆㩗 㰚䢪 (Structural Mutation)㢖 㣪 ㏢ 㩗 㰚 䢪 ( E l e m e n t M u t a t i o n ) Ṗ 㧞 ┺ . ῂ㫆㩗 㰚䢪⓪ ECB ✺⪲ 㧊⬾㠊㰚 ㍺Ἒ ╖㌗㦮 ῂ㫆Ṗ 㨂ῂ㎇♮⓪ ὒ㩫㧊┺. 㧊⪲㖾 ㌞⪲㤊 ṳ 㼊Ṗ 䌲㠊⋮⓪ ộ㧊┺ 㣪㏢㩗 㰚䢪⓪ ṗṗ㦮 ECB
✺㦮 ㏣㎇✺㧊 ⼖䢪䞮⓪ ộ㧊┺. 㧊㢖 ṯ㧊 2 Ṗ 㰖 ἓ㤆㦮 㰚䢪 ⻫㦚 㩲㔲䞮⓪ 㧊㥶⓪ 㧎Ὃ ㌳ ⳛ㼊㦮 ┺㟧䞲 ⼖䢪⯒ 㔲☚䟊 ⽊₆ 㥚䞲 ộ㧊┺.
㧊⩂䞲 㰚䢪 ὒ㩫㦖 㑮Ⱔ㦖 ṳ㼊✺㧊 ⰺ ㎎╖
⯒ 䡫㎇䞮Ⳇ 㰚䢪䞮⓪ Ṗ㤊◆ ㌳䞮Ⳇ 㧊⩂䞲 ὒ 㩫㦚 Ệ䂮Ⳋ㍲ ㍺Ἒ㧦₆ 㦮☚䞮⓪ ㍺Ἒἆὒ㠦 ┺
┺⯒ 㑮 㧞┺. Fig. 6 ⓪ 㰖⁞₢㰖 ㍺ⳛ䞲 ⽎ 㔲㓺 䎲㦮 㩚㼊㩗㧎 ῂ㎇㠦 ╖䟊 ☚㔳䢪䞲 ⁎Ⱂ㧊┺.
ࣜ
ࣱ࣪ࣜ斲嵆ࣜ櫶割࣭ࣤࣥࣜ
ࣜ
ࣱ࣭࣭࣪࣪ࣜ昪凊ࣜ堆旇汞ࣜ怾洢ࣜ洛汞ࣜ
㼁ٻ ⻞㱎⪲ٻٻ ⽎ٻٻ 㡆ῂ㠦ٻ ㍺Ἒٻٻ ╖㌗㧊ٻ ♮⓪ٻ ڢۀڼۍٻ ڮ۔ێۏۀۈ 㦖ٻٻٻ ڤۉۋېۏٻٻٻ ڭۊۏڼۏۄۊۉڼۇٻٻٻ ڮۋۀۀڿ Ṗٻٻڪېۏۋېۏٻڭۊۏڼۏۄۊۉڼۇٻڮۋۀۀڿ 㠦㍲ٻ㧒㩫ٻṦ㏢♮⓪ٻ ộ㦚ٻῗ⁏㩗㧎ٻ⳿㩗㦒⪲ٻ㍺Ἒ⯒ٻ㔲☚䞲┺ډٻٻ
⽎ٻ 㡆ῂ㠦㍲⓪ٻ 㔺䠮䞮⓪ٻ 㔺㩲ٻ ڤۉۋېۏٻ ڭۊۏڼۏۄۊۉڼۇٻ ڮۋۀۀڿ ⓪ٻٻ ڎڐڋڋۍۋۈ 㦒⪲ٻٻ 㩫䞮ἶٻٻ 㾲㫛ٻٻ ⳿䚲ٻ ڪېۏۋېۏٻڭۊۏڼۏۄۊۉڼۇٻڮۋۀۀڿ ⓪ٻڍڏڋۍۋۈ 㦒⪲ٻ㍶㩫䞲
┺ډڃڡۄۂډٻڒڄٻٻ ٻ
ࣱ࣭࣮࣪࣪ࣜ昪凊ࣜ堆旇汞ࣜ微塾廇ࣜࣜ
㞴㍲ٻ 㠎 䟞❅㧊ٻ ⽎ٻ 㡆ῂ㦮ٻ ㍺Ἒٻ ╖㌗㦖ٻ ڢۀڼۍٻ ڮ۔ێۏۀۈ 㧊┺ډٻ➆⧒㍲ٻṗٻ䛞✺㦚ٻڠڞڝ ⪲ٻ⳾◎Ⱇٻٻ 䞲┺ډٻ
ٻ
ࣱ࣭࣯࣪࣪ࣜ昪凊ࣜ堆旇汞ࣜ滊筚ࣜ愕ࣜ磏儆ࣜࣜ
(1) 滊筚 刂洛
⽎ٻ㔺䠮㠦㍲㦮ٻ㰚䢪ٻὒ㩫㦖ٻῂ㫆㩗ٻ㰚䢪㢖ٻ㣪ٻ
G
Fig. 6 Conceptual architecture of an artificial creature
G
Fig. 7 Case Study(1)
㏢㩗ٻ㰚䢪⯒ٻỆ䂲┺ډٻڡۄۂډٻړ 㦖ٻ⁎ٻ㰚䢪ٻὒ㩫☯㞞ٻ
⋮䌖⋮⓪ٻῂ㫆㩗ڇٻ㣪㏢㩗ٻ⼖䢪✺㦚ٻ⋮䌖⌊ἶٻ㧞┺ډٻٻ (2) 磏儆 刂洛
䘟Ṗ⓪ ṗṗ㦮 㩗䞿☚ 䞾㑮㠦 ➆⯎ 㑲㥚⯒ ₆㦒⪲ 䞲
┺. ⽎ 㔺䠮㠦㍲⓪ 2 Ṗ㰖 ⻫㦒⪲ 㑲㥚⯒ ἆ㩫䞮ἶ 䘟Ṗ䞲┺.ٻ
ڌډٻῂ㫆㩗ٻ㰚䢪⋮ٻ㣪㏢㩗ٻ㰚䢪㠦ٻ䟊╏䞮⓪ٻṗ ṗ㦮ٻ䟃⳿✺㠦ٻ⳾✶ٻ㑲㥚⯒ٻ▪䟊㍲ٻ䞮⋮㦮ٻṨ㦒⪲ٻ 㑲㥚ⰺₖ㦚ٻ䞮⓪ٻ⻫ٻٻ
ٻ
G(c)TOTAL = G(c)STRUCTURAL + G(c)ELEMENT
( G(c)ELEMENT = 0 if G(c)STRUCTURAL < RT ) 㡂₆㍲,
G(c)TOTAL = 㽳 㩗㦧ὒ㩫㠦 ╖䞲 䘟Ṗ 㩦㑮
G(c)STRUCTURAL = ῂ㫆㩗 㰚䢪㠦 ╖䞲 䘟Ṗ 㩦㑮 G(c )ELEMENT = 㣪㏢㩗 㰚䢪㠦 ╖䞲 䘟Ṗ 㩦㑮 2. Pareto Ranking⻫㦒⪲㍲ 㑲㥚 ⰺₖ 㔲 ῂ㫆㩗 㰚䢪㢖 㣪㏢㩗 㰚䢪㠦 䟊╏䞮⓪ 䟃⳿✺㦮 㤆㑮䞲 ṳ㼊Ⱒ㦚 ㆧ㞚㍲ 䘟Ṗ䞮ἶ 㤆㑮䞮㰖 ⴑ䞲 ṳ㼊✺
㦖 㑲㥚 ⰺₖ 㔲 䘟Ṗ ╖㌗㠦㍲ ⹎Ⰲ 㠜㞶 ⻚Ⰲ⓪
⻫
5.1.4 昪凊 冶刂
Gear System 㦮 䝚⩞㧚㤢䋂 ῂ䡚㦖 PC ㌗㠦㍲
Visual C++⪲ ῂ䡚䞮㡖┺.
⽎ 㔺䠮㠦㍲⓪ ṗ 2 Ṗ㰖 ἓ㤆㦮 㑲㥚 ⰺₖ㦚
₆㭖㦒⪲ ⰺ 1000 ㎎╖㝿 㰚䢪⯒ ⽋䞮ἶ ⁎ ἆ ὒ⯒ ☚㿲䟊 ⌊㠞┺.
Fig. 9㢖 Fig. 10 㦖 2 Ṗ㰖 䘟Ṗ ⻫㠦 ➆⧒ ⋮ 䌖⋮⓪ ⰺ ㎎╖㠦㍲ Ṗ㧻 㤆㑮䞲 ṳ㼊㦮 䣢㩚㑮
⯒ ⋮䌖⌎ ộ㧊ἶ, 㾲㫛 ⳿䚲Ṩ(240rpm)㦚 䟻䞮⓪ 㑮⪊㦮 ἆὒ 㹾⯒ ⽊㡂㭒ἶ 㧞┺.
⁎Ⱂ㠦㍲ٻ⽊Ⳋٻ㞢ٻ㑮ٻ㧞❅㧊ٻ㼁ٻ⻞㱎ٻٻ⻫㦖ٻ 㟓ٻڒڋ ㎎╖ٻ㧊䤚䎆ٻٻ㑮⪊㦚ٻٻ㔲㧧䞮⓪ٻộ㦚ٻٻ
G G G G G G G G G
G G
Fig. 8 Example of Evolution Process
⽒ٻ㑮Ṗٻ㧞ἶڇٻ⚦ٻ⻞㱎ٻ⻫㦖ٻٻ㟓ٻڎڋ ㎎╖ٻ㧊䤚
䎆ٻ㑮⪊㦚ٻ㔲㧧䞮⓪ٻộ㦚ٻ㞢ٻ㑮Ṗٻ㧞┺ډٻٻ
㍲⪶㠦㍲ٻٻ 㠎 䟞▮ٻٻ ộ㻮⩒ٻٻ Ὃ䞯㩗ٻٻ Ṳ⎦㠦ٻ
㍲㦮ٻ㾲㩗㍺Ἒ⧖ٻ㾲㩗ٻ䟊⯒ٻ䟻䞲ٻザ⯎ٻ㑮⪊㧊┺ډ
➆⧒㍲, 2 Ṗ㰖 ἓ㤆㦮 䘟Ṗ⻫㦚 ゚ᾦ䟊 ⽊㞮㦚
➢ ⚦ ⻫ ⳾⚦ ㍺Ἒ 㦮☚㠦 ⰴ⓪ ἆὒ⯒ ⽊㡖 㰖Ⱒ 䣾㥾㎇㦮 䁷Ⳋ㠦㍲ ⽊㞮㦚 ➢ ⚦ ⻞㱎 ⻫
(Pareto Ranking) 㧊 ▪ 䣾㥾㩗㧊⧖ ộ㦚 㞢 㑮Ṗ 㧞┺.
㩚㼊㩗㧎 㰚䢪 ὒ㩫㦚 ㌊䘊⽊Ⳋ, 㼁 ⻞㱎
⻫㦖 㰚䢪 㽞₆㠦⓪ ┺㏢ 㞞㩫䞲 ㌗䌲
⯒ 㥶㰖䞮㰖Ⱒ 㰚䢪⯒ Ệ❃䞮㡂 㑮⺇ ㎎╖⯒ 㰖ٻ
⋮Ⳋ㍲ 㞞㩫㩗㧎 㰚䢪⯒ 㰚䟟䞮⓪ ộ㦚 㞢 㑮Ṗ 㧞㠞┺. ⚦ ⻞㱎 㔺䠮 ⻫㦖 ㌗╏䧞 㞞㩫㩗㧎 㰚䢪⯒ Ệ❃䞮Ⳋ㍲ ┺㟧㎇ 㦚 Ṗ㰚 ㍺Ἒ ἆὒ✺ٻ ٻ
G G GG G G G
Fig. 9 Evolution of Generation(Method 1)
G
Fig. 10 Evolution of Generation(Method 2)
㦚 ☚㿲䟊 ⌊⓪ ộ㦚 ἂ 䞶 㑮 Ṗ 㧞㠞┺.
5. 斲嵆 櫶割(2) 5.2.1 昪凊 堆旇汞 怾洢 洛汞
⚦ ⻞㱎⪲, ⽎ ⏒ⶎ㠦㍲ 㩲㔲䞲 ⡦ 䞮⋮㦮 ㌂
⪖ 㡆ῂ⓪ ἆ⪶䎆 ⌊Ⰲ㧦Ⳋ Gear System 㦮 Dimension 䢫㧻㧊┺.
㼁 ⻞㱎 ㌂⪖ 㡆ῂ㠦㍲ ㍺Ἒ ╖㌗㧊 ♲ Gear System 㦖 2 㹾㤦 䘟Ⳋ㦚 ₆⽎㦒⪲ ⳾◎Ⱇ 䞮㡖┺.
⁎㠦 ╖䞲 ⁎Ⱂ㧊 Fig.11 㠦 ⋮㢖ٻ㧞┺ډٻٻ
⚦ ⻞㱎 ㌂⪖ 㡆ῂ㠦㍲⓪ Gear System 㦮 㫖
▪ ㌂㔺㩗㧎 䚲䡚㦚 㥚䟊 3 㹾㤦 Gear System Simulation 㦚 ⳾◎Ⱇ 䞮㡖┺.(Fig. 12)
5.2.2 昪凊 堆旇汞 微塾廇
Gear System㦮 reality ⯒ 㫆⁞㧊⧒☚ ㌊Ⰲ₆ 㥚 䟊 ṗ X, Y, Z 㿫 㞞㠦㍲ Gear System 㦖 Simulation
♲┺.
⚦ ⻞㱎 ㌂⪖ 㡆ῂ 㡃㔲 Visual C++㠦㍲ ῂ䡚
♮㠞㦒Ⳇ, 3 㹾㤦㦮 Gear System 㦚 䚲䡚䞮₆ 㥚䞮 㡂 3D ⳾◎Ⱇ 䒊㧎 ThinkDesign(6.0.2)㦚 ㌂㣿䞮㡖
┺.
ൟٻ⽎ٻ㔺䠮㦚ٻ⳾◎Ⱇٻ䞲ٻὒ㩫㦖ٻٻ
൯ ⽎ 㡆ῂ⓪ 㼁 ⻞㱎 ㌂⪖ 㡆ῂ㦮 ἆὒ⯒ 䌫㦒
⪲ 㔺㔲 䞮㡖㦢
൯ 㼁 ⻞㱎 㡆ῂ㠦㍲ ῂ㿫♲ Gear System Structure
⯒ 㨂Ỗ䏶
൯ ⽎ 㡆ῂ ╖㌗㦮 Gear Spur Gear 㧎 ộ㦚 Ṧ㞞䞮 㡂 Shaft 㦮 㿫㦚 X 㿫㦒⪲ ἶ㩫
൯ Gear ⓪ ῂ☯㿫㧊 ♮⓪ ╖㌗㠦 ➆⧒ 㩗╏䞲 ῂ
㏣ 㫆Ị㠦 ⰴ㿪㠊 Y 㿫 䢏㦖 Z 㿫㦒⪲ ῂ䡚♾
G Fig. 11 The Dimension of First Case Study
G
Fig. 12 The Dimension of Second Case Study 5.2.3 昪凊 冶刂
Gear System㦚 ῂ㎇䞮⓪ ṗ 䛞✺㦚 ╖㌗㦒⪲
3Ṳ㦮 㿫㦚 ἶ⩺䞲 ㍺Ἒ ἆὒ⓪ Table 1 ὒ ṯ┺.
㧊 ㌮䝢 㡃㔲 㰚䢪 ὒ㩫 㭧㠦 㤆㑮䞲 ṳ㼊⯒
ㆧ㞚 ⋮䌖⌎ ộ㧊┺.
6. 冶 嵦
⽎ ⏒ⶎ㠦㍲⓪ 㥶㩚㧦 㞢ἶⰂ㯮㠦㍲ 㫆⁞ ▪ 䢫 㧻 ♲ Ṳ⎦ 㦮 㰚 䢪 㡆 ㌆ ⻫㦚 㧊 㣿 䞮㡂 G e a r System 㦚 ╖㌗㦒⪲ 㺓㦮㩗 ㍺Ἒ⧒⓪ 䝚⩞㧚㤢䋂
⯒ 㩲 㞞 䞮 㡖 ┺ .
⽎ ⏒ⶎ㠦㍲ 㩲㞞䞲 㰚䢪 㡆㌆⻫㦚 㧊㣿䞲 㺓㦮㩗
㍺Ἒ⓪ 㧦㡆Ἒ㦮 㰚䢪 ὒ㩫㦚 ⁎ ⳾㼊⪲ 䞮㡂 㧎 Ὃ㔲㓺䎲㦚 Ⱒ✺ἶ ⁎ 㞞㠦㍲ 2 Ṗ㰖 ἓ㤆㦮 ⳾㦮
㔺 䠮 㦚 䞮 㡖 ┺ .
ٻٻٻ㼁 ⻞㱎 ㌂⪖ 㡆ῂ⪲㖾 㰚䢪㩗 㡆㌆⻫㦚 㧊㣿 䞮㡂 ㌳, 䘟Ṗ, 㨂㌳㌆㦮 Ṳ⎦㦚 ₆⽎ Ṳ⎦㦒⪲
㤆ⰂṖ Ⱒ✶ 㧎Ὃ㦮 ㌳ⳛ㼊⯒ 㧊 ὒ㩫㦚 Ệ䂮Ợ 䞮Ⳋ㍲ 䞿Ⰲ㩗㧊ἶ 䣾㥾㩗㧎 ㍺Ἒ⯒ 㑮䟟䞮㡖┺.
㰚䢪 ὒ㩫 ☯㞞㠦⓪ ECB ⧒⓪ Ṗ⼖㩗 㧊ἶ ┺ Table 1 Sample of Second Design Result
G
㹾㤦㩗㧎 な⪳㦚 㩲㞞䞾㦒⪲㖾 ῂ㫆㩗 㰚䢪㢖 㣪
㏢㩗 㰚䢪㦮 2 Ṗ㰖 㰚䢪 ⻫㦚 㩲㞞䞮㡖┺.
䘟Ṗ ὒ㩫㠦㍲☚ Ⱎ㺂Ṗ㰖⪲ 2 Ṗ㰖㦮 䘟Ṗ
⻫㦚 㩲㞞䞾㦒⪲㖾 ṗṗ㦮 䘟Ṗ ⻫㠦 ➆⯎ ㍺ Ἒ ἆὒ㢖 㾲㩗 䟊⯒ 䟻䞲 㑮⪊㦮 ὒ㩫㦚 ㌊䘊 ⽚ 㦒⪲㍲ ▪㤇 䣾㥾㩗㧊ἶ 㞞㩫♲ 䘟Ṗ ⻫㦚 㯳ⳛ 䞮㡖┺.
⽎ 㔺䠮㠦㍲⓪ 㽳 1000 ㎎╖ ☯㞞 㰚䢪⯒ ⽋
䞮㡖ἶ 2 Ṗ㰖 䘟Ṗ ⻫ ⳾⚦Ṗ 㑮 ⺇㎎╖⯒
Ệ䂮Ⳋ㍲ 㾲㩗䟊⪲ 㑮⪊䞮⓪ ộ㦚 ⽒ 㑮 㧞㠞┺.
⽎ 㡆ῂṖ ₆㫊㦮 㥶㩚㧦 㞢ἶⰂ㯮ὒ ┺⯎㩦㦖 㼁 ⻞㱎⪲ ECB ⧒⓪ Ṳ⎦㦚 ㌂㣿䞾㦒⪲㖾 Binary Code ⯒ 㥶㩚㧦 㞢ἶⰂ㯮ὒ⓪ ┺⯎ ┺㹾㤦㩗㧎 㩫
⽊⯒ Ṗ㰞 㑮 㧞ἶ ⚦ ⻞㱎⪲ ECB 㦮 Ṗ㌗ 㫆㧎 䔎⯒ 㧊㣿䞮㡂 㤦䞮⓪ ㍺Ἒ㦮 ▪㤇 ┺㟧䞲 ῂ㫆⯒
㩲㔲䞮ἶ 㔺䠮 䞶 㑮 㧞┺⓪ ộ㧊┺.
⚦ ⻞㱎 ㌂⪖ 㡆ῂ㠦㍲⓪ 㼁 ⻞㱎 ㌂⪖ 㡆ῂ
⯒ 䌫㦒⪲ System 㦮 ὋṚ㩗 䢫㧻㦚 㔲☚䞮㡖┺.
㍺Ἒ ἆὒ, 㼁 ⻞㱎 ㌂⪖ 㡆ῂ⽊┺ 㫖 ▪ ㌂㔺㎇
㧞⓪ 䝚⩞㧚 㤢䋂⯒ ῂ䡚 䞶 㑮 㧞㠞┺. ┺Ⱒ, ₆ 㠊㦮 䟻㎇㠦 㧞㠊 㰗ṗ㦮 ῂ㏣㫆ỊⰢ㦚 ἶ⩺䞲
⋮Ⲏ㰖 ┺㟧䞲 䟻㎇㦮 ㍺Ἒ⓪ 㩲㞞䞮㰖 ⴑ䟞┺.
⽎ ⏒ⶎ㠦㍲ 㩲㔲䞲 㰚䢪 㡆㌆⻫㦚 㧊㣿䞲 㧦☯䢪 ㍺Ἒ⪶㠦 ╖䞲 㡆ῂ⓪ 㞴㦒⪲☚ Ἒ㏣
♶ ộ㧊Ⳇ ▪㤇 㧊㌗㩗㧎 ㍺Ἒ⻫㧊 㩲㔲♶ ộ㧊┺.
焾処怾竒
1. P.J. Angeline, Ph.D. “Evolutionary algorithms and emergent intelligence,” thesis of The Ohio State University, 1993.
2. K.F.Man, Member, IEEE, K.S. Tang, and S.
Kwong, Member, IEEE, “Genetic Algorithms : Concepts and Applications,” OCTOBER 1996.
3. In Ho Lee, Joo Heon Cha and Jay Jung Kim, “Framework for Innovative Mechanical Design Using Simulated Emergent Evolution,” January 2002.
4. P.Giuggioli Busacca, M. Marseguerra, E. Zio,
“Multiobjective optimization by genetic algorithms,”
December 2000.
5. Brian S. Thompson, "㺓㦮㩗 Ὃ䞯 ㍺Ἒ,” 㩲 1 㧻.
2001.
6. F'abio Roberto Miranda, Joao Eduardo Kogler Jr, Emilio Del Moral Hernandez, Marcio Lobo Netto, “An artifical life approach for the animation of cognitive characters,” 2001.
7. Shigeru Obayashi, Daisuke Sasaki, Yukihiro Takeguchi, July 2000, Multiobjective Evolutionary Computation for Supersonic Wing-shape Optimization.