논문 2011-48SD-9-3
MEMS 용량형 각속도 센서용 CMOS 프로그래머블 인터페이스 회로
( CMOS Programmable Interface Circuit for Capacitive MEMS Gyroscope )
고 형 호*
* ( Hyoungho Ko )
요 약
본 논문에서는 MEMS 용량형 각속도 센서용 프로그래머블 CMOS 인터페이스 회로를 제작하고, 이를 MEMS 센싱 엘리먼 트와 결합하여 평가하였다. 본 회로는 10 bit 프로그래머블 캐패시터 어레이 를 이용한 전하 증폭기, 오프셋 미세 조정을 위한 9 비트 DAC, 출력 민감도의 미세 조정을 위한 10 비트 PGA를 내장하여, 오프셋 및 민감도 오차를 정밀 조정할 수 있다. 제 작 결과 자동 이득 제어 회로를 포함한 자가 발진 루프의 정상 동작을 확인하였다. 오프셋 오차와 민감도 오차는 각각 0.36%FSO 와 0.19%FSO 로 측정되었으며, 잡음 등가 해상도와 바이어스 불안정도는 각각 0.016 deg/sec 와 0.012 deg/sec 으 로 평가되었다. 본 회로의 조정 기능을 이용하여 MEMS 용량형 각속도 센서의 기생 용량으로 인하여 발생되는 출력 오프셋 및 출력 민감도의 산포를 감소시킬 수 있으며, 이는 센서의 양산성 및 수율 향상에 크게 기여할 수 있을 것으로 기대된다.
Abstract
In this paper, the CMOS programmable interface circuit for MEMS gyroscope is presented, and evaluated with the MEMS sensing element. The circuit includes the front-end charge amplifier with 10 bit programmable capacitor arrays, 9 bit DAC for accurate offset calibration, and 10 bit PGA for accurate gain calibration. The self oscillation loop with automatic gain control operates properly. The offset error and gain error after calibration are measured to be 0.36 %FSO and 0.19 %FSO, respectively. The noise equivalent resolution and bias instability are measured to be 0.016 deg/sec and 0.012 deg/sec, respectively. The calibration capability of this circuit can reduce the variations of the output offset and gain, and this can enhance the manufacturability and can improve the yield.
Keywords : Capacitive interface, Programmable circuit, Self oscillation, Gyroscope, MEMS
Ⅰ. 서 론
MEMS (Microelectromechanical Systems) 각속도 센서는 물체의 회전 속도를 측정하는 센서로, 자동차, GPS 결합형 관성 항법 시스템, 소비자 가전 등 다양한
*
정회원, 충남대학교, 전자공학과
(Department of Electronics, Chungnam National University)
※ 이 연구는 2010년도 충남대학교 학술연구비에 의해 지원되었음
접수일자: 2011년3월10일, 수정완료일: 2011년8월17일
분야에 적용되고 있다[1~3]. MEMS 각속도 센서의 구현 을 위하여 용량형, 압저항형, 압전형, 터널링 형, 전자기 형 등 다양한 형태의 각속도 검출 방식이 제안되었으며
[4], 이 중 용량형 방식은 낮은 소비 전력과 우수한 온도 특성 및 우수한 DC 특성으로 가장 널리 사용되고 있다
[5].
그러나 용량형 센서의 경우 기생 용량의 영향에 매우 민감하여, 기생 용량으로 인한 신호의 왜곡 및 제한을 보상할 수 있는 방안이 필수적이다. 특히 CMOS 인터 페이스 회로와 MEMS 센싱 엘리먼트가 분리되어 제작
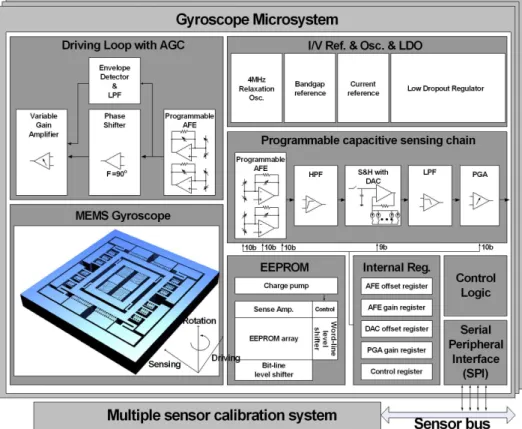
그림 1. 각속도 센서 마이크로시스템의 블록다이어그램 Fig. 1 Block diagram of gyroscope microsystem.
되는 경우 CMOS-MEMS 단일 칩 제작 방식에 비하여 기생 용량이 크게 증가하여, CMOS 칩과 MEMS 칩의 패키징 시에 발생하는 기생 용량은 수 pF 수준에 달한 다[6]. 일반적인 MEMS 센싱 엘리먼트의 전체 용량 변 화 폭이 수 십~수 백 fF 수준임을 감안하면 기생 용량 의 효과를 제거하지 않을 경우 센서의 동작 영역, 출력 오프셋 및 출력 민감도가 크게 제한됨을 알 수 있다. 이 와 같은 문제를 해결하기 위하여 프로그래머블 구조의 용량 감지 회로들이 발표된 바 있다[6~9]. 그러나 출력 민감도의 조정 기능이 없거나, 조정 해상도가 떨어지고, 조정 데이터를 저장할 수 있는 칩 내 비휘발성 메모리 가 없는 등의 한계점이 있다.
본 논문에서는 MEMS 용량형 각속도 센서용 프로그 래머블 CMOS 인터페이스 회로를 제안한다. 본 회로는 10 bit 프로그래머블 캐패시터 어레이 (Programmable Capacitor Array ; PCA)를 이용한 전하 증폭기 (charge amplifier), 오프셋 미세 조정을 위한 9 bit 디지털-아날 로그 변환기 (Digital to Analog Converter ; DAC), 출 력 민감도의 미세 조정을 위한 10 bit 프로그래머블 게
인 증폭기 (Programmalbe Gain Amplifier ; PGA)를 내 장하고 있다. 본 회로의 정밀 조정 기능을 이용하여 MEMS 용량형 각속도 센서의 기생 용량으로 인하여 발생되는 출력 오프셋 및 출력 민감도의 산포를 감소시 킬 수 있으며, 이는 센서의 양산성 및 수율 향상에 크게 기여할 수 있을 것으로 기대된다.
Ⅱ. 각속도 센서 마이크로 시스템의 설계
1. 시스템 구조
그림 1은 MEMS 각속도 센싱 엘리먼트와 CMOS 인 터페이스 회로가 결합된 각속도 센서 마이크로 시스템 의 블록 다이어그램이다. 제안하는 시스템은 크게 물체 의 회전을 감지하는 MEMS 각속도 센싱 엘리먼트와 MEMS 센싱 엘리먼트를 구동하고 회전에 따른 용량 변화를 감지하는 CMOS 인터페이스 회로로 구성된다.
CMOS 인터페이스 회로는 크게 MEMS 엘리먼트를 공 진 주파수에서 일정한 진폭으로 구동시키는 구동 루프 (driving loop), MEMS 엘리먼트의 용량 변화를 전압으
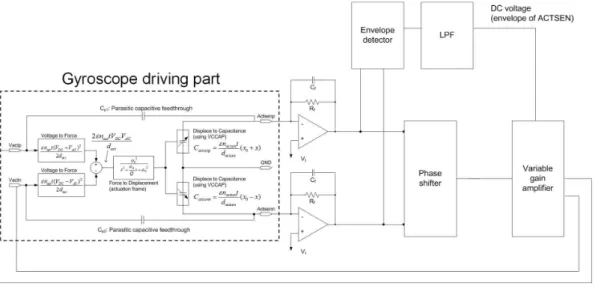
그림 2. AGC를 내장한 자기 발진 루프 Fig. 2. Self-oscillation loop with AGC.
로 변환하는 용량 감지부 (capacitive sensing chain), 기준 전류/전압/주파수 발생부, EEPROM 및 디지털 조 정 회로로 구성된다.
구동 루프는 MEMS 엘리먼트의 구동부 공진 주파수 에서 발진을 유지하는 자가 발진 루프 (self oscillation loop) 와 자가 발진 시의 발진 진폭을 일정한 값으로 유 지하는 자동 이득 제어 (Automatic Gain Control ; AGC) 회로로 구성된다[10~15]. MEMS 엘리먼트의 공정 오차로 인하여 구동부의 공진 주파수의 변동이 발생하 며, 본 구동 루프는 공진 주파수의 변동을 자동으로 추 종하여 항상 공진 주파수에서 일정한 진폭으로 자가 발 진을 수행하여 민감도를 향상시키는 역할을 한다.
MEMS 엘리먼트의 구동부는 일반적으로 감쇄비가 매우 낮은 저감쇄 (underdamped) 2차 시스템으로 모델 링 된다[10]. 전원 입력 또는 외부 노이즈 등의 요인이 있을 경우 MEMS 엘리먼트의 구동부에서 변위가 발생 하며, 이 때 변위의 주파수는 구동부 공진주파수와 일 치하고 위상은 MEMS 엘리먼트의 구동부 입력 신호 대비 90 도의 위상 지연을 가진다. MEMS 엘리먼트의 구동부 변위 변화에 의해 발생하는 용량 변화는 전하 증폭기 형태의 아날로그 전처리 회로 (AFE ; Analog Front-End) 를 통하여 증폭하며, 이때의 진폭은 포락선 검파기 (Envelope Detector) 및 가변 이득 증폭기 (Variable Gain Amplifier)를 이용한 AGC 회로에 의하 여 결정된다. AFE의 출력 신호를 위상 변화기를 통하 여 90도 위상을 지연시키면, MEMS 엘리먼트의 구동부 입력 신호 대비 180 도의 위상 지연을 가지게 되어 발
진 조건을 만족하게 된다.
용량 감지부 (Capacitive Sensing Chain) 는 MEMS 각속도 센싱 엘리먼트에서 발생하는 용량 변화를 초퍼 안정화 구조를 이용하여 전압으로 변환하는 역할을 수 행하며[16], 출력 신호의 오프셋 및 민감도를 각각 두 단 계로 미세하게 조정할 수 있도록 설계되었다. 오프셋 및 민감도의 미세 조정 회로를 이용하여 MEMS 엘리 먼트 자체의 특성 변동 및 MEMS 엘리먼트와 CMOS 회로의 와이어 본딩 시 발생하는 기생 용량의 산포 등 으로 인하여 발생하는 출력 신호의 오차를 감소시키고, 높은 정밀도를 확보할 수 있다.
용량 감지부의 첫 단인 AFE는 전하 증폭기 형태로 구성되며, 전하 증폭기 내의 3개의 10 bit의 이진 가중 치 PCA를 이용하여 오프셋 및 게인을 대략적으로 조 정 가능하도록 설계되었다. MEMS 엘리먼트의 각속도 에 대한 용량 변화 민감도는 1 fF/deg/sec 수준이며, 100 deg/sec 의 각속도 입력 범위를 고려할 때, MEMS 엘리먼트의 전체 용량 변화는 100 fF 수준이다. 그러 나, 본 회로의 제작 시 사용된 0.5 μm CMOS 공정의 경우 제작할 수 있는 캐패시터의 최소 크기는 10 fF 이며, 이는 10 deg/sec 의 각속도 입력에 해당하고, 전 체 각속도 입력 범위의 10 % 에 해당한다. 신호의 증 폭을 위해서는 AFE에서 발생하는 기생 용량 및 공정 오차를 반드시 보상하여야 하나, CMOS 공정의 최소 캐패시터의 구현 제한으로, 높은 정밀도를 확보하기에 는 제약이 따른다. 따라서 AFE에서 오프셋 및 민감도 를 오차 10% 수준에서 대략적으로 조정하고, 이후 오
프셋 미세 조정용 9 bit DAC와 민감도 미세 조정용 10 bit PGA를 이용하여 출력 오프셋 및 출력 민감도를 정 밀하게 조정한다.
각 조정 회로의 조정치는 내부 레지스터에 저장되며, 내부 레지스터는 SPI (Serial Peripheral Interface)를 통 하여 접근할 수 있다. 내부 레지스터의 값은 칩 내의 EEPROM에 저장되며, EEPROM에 저장된 값은 전원이 켜질 경우 자동으로 내부 레지스터에 로드된다.
2. 자기 발진 구동 루프
각속도 센서는 진동하고 있는 질량체에 회전이 인가 될 경우 발생하는 코리올리의 힘을 감지하는 구조이다.
이 때 진동하고 있는 질량체의 진동 변위는 공진 주 파수에서 최대치를 가지며, 따라서 공진 주파수에서 진 동할 경우 센서의 민감도가 최대치를 가진다. 그러나 MEMS 공정 상의 오차 또는 온도 변화 등으로 인하여 공진 주파수의 변동이 발생하게 되며, 공진 주파수 변 동에 따라 구동 신호의 주파수도 변동되어야 한다. 따 라서 공진 주파수 변동을 추종하여 공진 주파수에서 공 진을 유지할 수 있는 회로의 설계가 필수적이다. 따라 서 본 회로에서는 MEMS 센싱 엘리먼트가 외부 소자 의 사용 없이 구동부 공진 주파수에서 공진을 지속할 수 있도록 그림 2와 같은 구조의 AGC를 내장한 자기 발진 루프를 설계하였다.
자기 발진 루프는 MEMS 센싱 엘리먼트의 구동 감 지 전극에서 발생하는 용량 변화를 전하 증폭기를 통 하여 전압으로 변환하고, 이 신호의 위상을 90도 지연 하여 다시 구동 전극에 인가하는 역할을 한다. 이 때 전하 증폭기에서 발생하는 전압 신호의 envelope 신호 를 이용하여 구동 증폭기의 출력 진폭을 제어하는
그림 3. 자기 발진 루프의 시뮬레이션 결과 Fig. 3. Simulation results of self-oscillation loop.
자동 이득 제어 (Automatic Gain Control ; AGC) 회로 를 구성한다. MEMS 센싱 엘리먼트는 일반적으로 2차 시스템으로 모델링 되어, 공진 주파수에서 90도의 위상 지연을 가지며, 또한 구동 루프에서 90도의 위상 지연 을 가진다. 따라서 MEMS 센싱 엘리먼트와 구동 루프 를 포함한 전체 개루프 위상 지연은 MEMS 센싱 엘리 먼트의 공진점에서 180도가 되며, MEMS 센싱 엘리먼 트의 구동부 공진 주파수로 본 전기기계적 구동 루프 가 발진하게 된다. 그림 3은 설계된 자기 발진 루프의 시뮬레이션 결과이다. 자기 발진 루프 및 AGC가 정상 적으로 동작하여 2.5 V의 DC 오프셋을 중심으로 250 mV의 진폭으로 일정하게 발진이 일어남을 확인할 수 있다.
3. 용량 감지부
가. 초퍼 안정화 구조의 용량 감지 회로
그림 4에 도시된 본 회로의 용량 감지부는 저주파 노 이즈의 저감을 위하여 초퍼 안정화 구조를 채택하였다
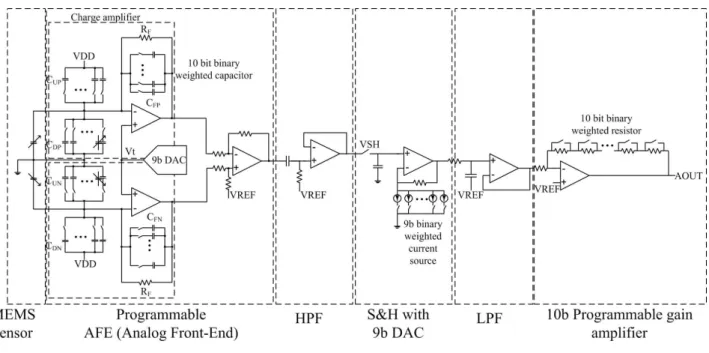
[16]. 용량 감지부는 3개의 10 bit PCA를 내장한 2개의 전하 증폭기 (charge amplifier) 와 차동 증폭기로 구성 된 AFE, 저주파 노이즈를 제거하기 위한 고역 통과 필 터, 샘플 & 홀드 demodulation 회로 오프셋 조정용 DAC, 고주파 성분 제거를 위한 저역 통과 필터 및 출 력 민감도 조정을 위한 PGA로 구성되어 있다.
그림 5와 그림 6에 초퍼 안정화 구조를 이용한 용량 감지 회로의 타이밍 도 및 시뮬레이션 결과를 도시하였 다. 외부 회전이 인가될 때 MEMS 각속도 센싱 엘리먼 트의 센싱 전극에서는 코리올리 힘에 따른 차동 용량 변화가 발생한다. 이 용량 변화는 자기 발진 구동 루프 에 의해 생성되는 구동부의 발진 신호 (그림 5(A)) 에 modulation 되어 있으며, 용량 변화의 envelope 이 원하 는 각속도 신호에 해당된다. 용량 변화는 용량 감지부 의 첫 단 전하 증폭기에 의하여 전압으로 변환된다 (그 림 5(D), 그림 6(A)). 이 때, 용량 변화 신호에 포함되어 있는 기생 용량으로 인한 오프셋 변동 및 공정 오차 등 으로 인한 민감도 오차는 프로그램 가능한 캐패시터 어 레이에 의해 제거된다. 이후 고역 통과 필터를 통하여 저주파 신호를 다시 한번 제거하고 (그림 6(B)), 샘플
& 홀드 회로를 통하여 demodulation을 수행한다 (그림 5(D)). 샘플 & 홀드 demodulation을 위한 스위칭 신호 는 구동부의 발진 신호 (그림 5(A))와 이를 2 분주한
그림 4 프로그래머블 용량 감지 회로
Fig. 4. Programmable capacitive sensing circuit.
그림 5. 초퍼 안정화 회로의 타이밍 도 Fig. 5. Timing diagram of chopper-stabilization.
신호 (그림 5(B))를 AND 하여 생성 (그림 5(C))한다.
이 때, 9 비트 전류 모드 DAC를 이용하여 오프셋 전류 를 발생시켜 오프셋을 정밀하게 보정한다. 이후 저역 통과 필터를 통하여 원하지 않는 고주파 성분을 제거하 고 (그림 6(C)), 10 비트 PGA를 이용하여 출력 신호의 민감도를 미세 조정한다.
용량 감지부의 구성 블록들은 프로그래머블 하게 설 계되었으며, 센서의 출력 오프셋 및 민감도를 조정하기 위한 데이터들은 내부 레지스터에 보관된다. 내부 레지 스터는 SPI 인터페이스를 통하여 접근 가능하도록 설 계되었다. 레지스터에 보관된 데이터는 내부 EEPROM 에 저장되고, 전원이 인가될 시 Power-on-Reset 회로 에 의하여 다시 레지스터에 로드된다.
그림 6. 용량 감지 회로의 시뮬레이션 결과
Fig. 6. Simulation results of capacitive sensing circuit.
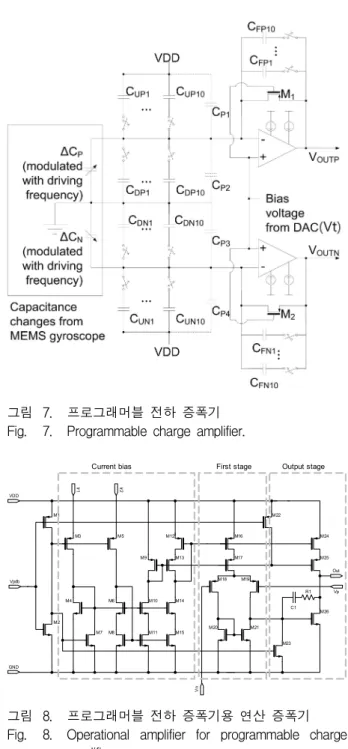
나. 프로그래머블 전하 증폭기 회로
그림 7은 용량 감지 회로의 AFE를 구성하는 주요 블록인 전하 증폭기이며, MEMS 센싱 엘리먼트에서 발 생하는 용량 변화를 전압으로 변환하는 역할을 수행한 다. 본 전하 증폭기는 캐패시터와 DC 특성 안정화 용
저항의 병렬 피드백 구조를 사용하여 설계되었으며, 본 전하 증폭기의 출력 전압은 식 (1)과 같이 정의된다[17]. 이 때, s=jw를 의미하며, RF는 long channel 트랜지스 터인 M1과 M2의 RDS를 의미하며, 동작 범위에서 100 MΩ 이상의 매우 큰 값을 가진다. 따라서 실제 전하 증 폭 동작에는 거의 기여하지 않으며, opamp의 음의 입 력단의 DC 안정성을 높이는 역할만을 수행한다[18]. ΔCP
와 ΔCN 은 MEMS 센싱 엘리먼트에서 발생하는 용량 변화이며, Vt는 DAC를 이용하여 생성되는 바이어스 전 압으로, opamp의 양의 입력단에 인가된다. CP1, CP2, CP3, CP4는 기생 용량이며, CFP, CFN, CUP, CDP, CDN, CUN
는 오프셋과 민감도를 조정하기 위한 프로그래머블 캐 패시터를 의미한다.
(1)
본 전하 증폭기는 6개의 10 비트 프로그래머블 캐패 시터 어레이 (CFP, CFN, CUP, CDP, CDN, CUN) 를 내장하 고 있다. 각각의 캐패시터 어레이는 최소 10.1 fF 단위 로 조정 가능하도록 설계되었다. 식 (1)에서, 기생 용량 (CP1, CP2, CP3, CP4)으로 인하여 발생되는 신호는 오프셋 조정용 캐패시터 어레이 (CUP, CDP, CDN, CUN)를 조정하 여 제거할 수 있다. 또한 MEMS 센싱 엘리먼트에서 발 생하는 차동 용량 변화 (ΔCP 및 ΔCP)의 출력 민감도는 연산 증폭기에 연결된 피드백 캐패시터 CFP, CFN를 조 정하여 원하는 값으로 조정 가능하다. 프로그래머블 캐 패시터 어레이를 적용한 본 차동 전하 증폭기는 공정 산포 등으로 인하여 발생하는 민감도 오차, MEMS 센 싱 엘리먼트와 인터페이스 회로의 패키징 시 또는 MEMS 센싱 엘리먼트 자체의 캐패시턴스 mismatch 에 발생하는 기생 용량의 산포 등으로 인한 오프셋 오 차를 조정할 수 있어 회로의 동작 영역을 최대한 확보 할 수 있다.
그림 8은 본 전하 증폭기에 사용된 연산 증폭기의 구 조이다. 본 연산 증폭기는 2개의 전류원을 이용하여 wide swing cascode 전류 거울을 형성하고, 이를 이용
그림 7. 프로그래머블 전하 증폭기 Fig. 7. Programmable charge amplifier.
M1
M2 VDD
GND Vpdb
M3 M5
M4 M6
M8 M7
M9 M12
M13
M10
M11
M18 M19 M17 M16
M20 M21
M23 M26 M22
M25 M24
M14
M15
Vp
Vn
Out
Ir1 Ir2
R1
C1
Current bias First stage Output stage
그림 8. 프로그래머블 전하 증폭기용 연산 증폭기 Fig. 8. Operational amplifier for programmable charge
amplifier.
하여 class A 형태의 출력단을 가지는 2단의 밀러 증폭 기의 구조를 가진다. 본 연산 증폭기의 DC 이득은 91 dB, 위상 여유는 70 도, unit gain bandwidth는 9 MHz 로 설계되어, 공진 주파수 수 kHz 대역의 신호를 처리 하기에 충분하도록 설계되었다.
다. 오프셋 및 민감도 조정 회로
그림 9와 그림 10은 각각 센서의 출력 오프셋 및 민 감도를 미세 조정하기 위한 오프셋 조정용 9 비트
그림 9. 오프셋 조정용 9비트 DAC Fig. 9. 9 bit DAC for offset calibration.
그림 10. 민감도 조정용 10비트 PGA Fig. 10. 10 bit PGA for gain calibration.
DAC와 10 비트 PGA이다. AFE 에서도 오프셋 및 민 감도를 조정 가능하나, CMOS 공정 상 구현할 수 있는 최소 캐패시터가 제한되어, 높은 정밀도 확보를 위해 추가적인 오프셋 및 민감도 조정 회로가 필요하다.
오프셋 조정용 9 비트 DAC는 샘플 & 홀드 회로의 buffer 단에 피드백 저항과 함께 부착되며, 전류 모드 이진 가중형 (binary-weighted) 전류 DAC의 구조를 채 택하였다. 본 DAC를 이용한 출력 오프셋 조정은 0.48 mV 단위로 244 mV 까지 가능하도록 설계되었다.
출력 민감도의 미세 조정을 위한 10 bit PGA 는 일 반적인 반전 증폭기의 구성을 기본으로, 피드백 저항을 조정 가능하도록 설계되었다. 출력 게인은 1/64 V/V 단 위로 16 V/V 까지 조정 가능하도록 설계되었다.
Ⅲ. 성능 평가 결과
그림 11(a)는 제작된 CMOS 인터페이스 회로의 모습 이다. 본 CMOS 회로는 0.5 μm 2P3M EEPROM 공정 을 이용하여 제작되었으며, 칩 사이즈는 2100 μm × 2900 μm 이다. 제작된 CMOS 회로는 그림 11(b)와 같 이 MEMS 각속도 센싱 엘리먼트와 함께 패키징 되어 각속도 센서 SoP (System on a Package) 마이크로시
(a) 인터페이스 회로 제작 결과 (a) Fabrication results of interface circuit
(b) CMOS 칩과 MEMS 칩이 함께 패키징 된 SoP (b) SoP with CMOS chip and MEMS chip 그림 11. 제작 결과
Fig. 11. Fabrication results.
그림 12. 자기 발진 루프의 동작 파형
Fig. 12. Output waveform of self-oscillation loop.
스템을 구성하였다.
그림 12는 제작된 시스템의 자기 발진 루프의 동작 파형이다. 초기 과도 상태 (transient state)를 거쳐 MEMS 센싱 엘리먼트의 공진 주파수인 5.04 kHz에서 안정적으로 발진을 시작하는 모습을 확인할 수 있다.
(a) 입출력 특성 (a) Input-output characteristic
(b) 주파수 스펙트럼 @ 1 Hz, 90 deg/sec 입력 (b) Frequency spectrum @ 1 Hz, 90 deg/sec input
(c) Root Allan variance 측정 결과 (c) Root Allan variance measurement results 그림 13. 성능 평가 결과
Fig. 13. Performance evaluation results.
그림 13은 제작된 시스템의 성능 평가 결과이다. 그 림 13(a)는 제작된 시스템의 입출력 특성을 평가한 그 래프이다. 5 V 공급 전원시 출력 오프셋, 민감도, 각속 도 입력 범위는 각각 2.5 V, 20 mV/deg/sec, ±100 deg/sec 으로 설정되었다. 프로그래머블 인터페이스 회 로를 이용하여 출력 특성의 조정 결과 오프셋 오차와 민감도 오차는 각각 0.36%FSO 와 0.19%FSO 로 측정 되었다.
그림 13(b)에 1 Hz, 90 deg/sec의 정현파 입력 시 출 력 파형의 주파수 스펙트럼을 도시하였다. 측정 결과 본 시스템의 잡음 등가 해상도 (Noise Equivalent Resolution, NER)은 0.016 deg/sec으로 측정되었다.
그림 13(c)는 제작된 시스템의 출력 바이어스 안정도 를 평가하기 사용되는 Root Allan variance를 측정한 그래프이다[19]. 측정 결과 점근선에서 바이어스 불안정 도 (bias instability)는 0.012 deg/sec 으로 평가되었다.
Ⅳ. 결 론
본 논문에서는 MEMS 용량형 각속도 센서용 프로그 래머블 CMOS 인터페이스 회로를 제작하고, 이를 MEMS 센싱 엘리먼트와 결합하여 평가하였다. 본 회로 는 10 bit 프로그래머블 캐패시터 어레이 를 이용한 전 하 증폭기, 오프셋 미세 조정을 위한 9 비트 DAC, 출력 민감도의 미세 조정을 위한 10 비트 PGA를 내장하고 있다. 성능 평가 결과 오프셋 오차와 민감도 오차는 각 각 0.36%FSO 와 0.19%FSO 로 측정되었으며, 잡음 등 가 해상도와 바이어스 불안정도는 각각 0.016 deg/sec 와 0.012 deg/sec 으로 평가되었다. 본 회로의 조정 기 능을 이용하여 MEMS 용량형 각속도 센서의 기생 용 량으로 인하여 발생되는 출력 오프셋 및 출력 민감도의 산포를 감소시킬 수 있으며, 이는 센서의 양산성 및 수 율 향상에 크게 기여할 수 있을 것으로 기대된다.
참 고 문 헌
[1] 이양두, 주병권, 신경, “자동차의 안전성과 환경을 위한 센서의 응용 현황”, 전자공학회지, 제37권 제 5호, 38-47쪽, 2010년 5월
[2] 김청월, 이병렬, 이상우, 최준혁, “진동형 각속도 검출 센서를 위한 애널로그 신호처리 ASIC의 구 현”, 전자공학회논문지-SD, 제40권 제4호, 65-73 쪽, 2003년 4월
저 자 소 개 고 형 호(정회원)
2003년 서울대학교 전기공학부 학사 졸업
2008년 서울대학교 전기공학부 박사 졸업
2008년~2010년 삼성전자 반도체 사업부 책임연구원 2010년~현재 충남대학교 전자공학과 전임강사
<주관심분야 : 아날로그 집적 회로, 센서 인터페 이스, MEMS>
[3] 이병렬, “마이크로 관성센서 기술”, 전자공학회지, 제28권, 제10호, 39∼44쪽, 2001년 10월
[4] J. J. Allen, “Micro-System Inertial Sensing Technology Overview”, SANDIA REPORT SAND2009-3080, Sandia National Laboratories, 2009.
[5] N. Yazdi, F. Ayazi, K. Najafi, “Micromachined inertial sensors”, Proc. IEEE, Vol. 86, no. 8, pp.
1640-1659, August 1998.
[6] M. Lemkin, et al., “A three-axis micromachined accelerometer with a CMOS position- enseinterface and digital offset-trim electronics”, IEEE J. Solid-State Circuits, Vol. 34, no. 4, pp.
456-468, April 1999.
[7] W. Bracke, et al., “On the optimization of ultra low power front-end interfaces for capacitive sensors”, Sensor. Actuat. A-Phys., Vol. 117, no.
2, pp. 273-285, January 2005.
[8] S. Callegari, et al., “Applicability of Field Programmable Analog Arrays to Capacitive Sensing in the Sub-pF Range”, Analog Integr.
Circ. S., vol. 47, no. 1, pp. 39-51, January 2006.
[9] S. Bangalore, et al., “A fully differential rail-to-rail CMOS capacitance sensor with floating-gate trimming for mismatch compensation”, IEEE Trans. Circuits Syst. I, Reg. Papers, Vol. 56, no. 5, pp. 975-986, May 2009.
[10] A. Lee, H. Ko., D. Cho, G. Hwang, “Non-ideal behavior of a driving resonator loop in a vibratory capacitive microgyroscope”, Microelectronics Journal, Vol. 39, no. 1, pp. 1-6, January 2008
[11] A. Sharma, M. F. Zaman, F. Ayazi, “A 104-dB Dynamic Range Transimpedance-Based CMOS ASIC for Tuning Fork Microgyroscopes”, IEEE J. Solid-State Circuits, Vol. 42, no. 8, pp.
1790-1802, August 2007.
[12] A. Sharma, M. F. Zaman, F. Ayazi, “A Sub-0.2 deg/hr Bias Drift Micromechanical Silicon Gyroscope With Automatic CMOS Mode-Matching”, IEEE J. Solid-State Circuits, Vol. 44, no. 5, pp. 1593-1608, May 2009.
[13] S. E. Alper, Y. Temiz, T. Akin, “A Compact Angular Rate Sensor System Using a Fully Decoupled Silicon-on-Glass MEMS Gyroscope”, IEEE/ASME J. Microelectromech., Vol. 17, no. 6, pp. 1418-1429, December 2008.
[14] C. D. Ezekwe, B. E. Boser, “A Mode-Matching Closed-Loop Vibratory Gyroscope Readout Interface With a 0.004 deg/s Noise Floor Over a
50 Hz Band”, IEEE J. Solid-State Circuits, Vol.
43, no. 12, pp. 3039-3048, February 2008.
[15] H. Chang, et al., “Integrated Behavior Simulation and Verification for a MEMS Vibratory Gyroscope Using Parametric Model Order Reduction”, IEEE/ASME J. Microelectromech., Vol. 19, no. 2, pp. 282-293, April 2010.
[17] J. Kim, et al., “An X-Axis Single-Crystalline Silicon Microgyroscope Fabricated by the Extended SBM Process”, IEEE/ASME J.
Microelectromech., Vol. 14, no. 3, pp. 444-455, June 2005.
[18] H. Ko, D. Cho, “Highly programmable temperature compensated readout circuit for capacitive microaccelerometer”, Sensor. Actuat.
A-Phys., Vol. 158, no. 1, pp. 72-83, March 2010 [19] IEEE Std 952-1997, “IEEE Standard Specification
Format Guide and Test Procedure for Single-Axis Interferometric Fiber Optic Gyros”, Annex C, 1998.