정보통신방송연구개발사업
클라우드 기반의 점진적 정밀 진화형 맵 생성 및 주행상황인지 SW 기술개발
A Development of Software Technology for the Generation of Detailed Map Progressively Updated
and the Driving Situation Awareness based on Cloud Computing
201 6. 01. 29.
주관기관 : 한국전자통신연구원
[보고 서식 제2호]
연차보고서
사업명 정보통신·방송 연구개발 사업 과제번호 R-20150224-000386 (R0126-15-1011)
과제명
(국문)클라우드 기반의 점진적 정밀 진화형 맵 생성 및 주행상황인지 SW 기술개발
(영문)A Development of Software Technology for the Generation of Detailed Map Progressively Updated and the Driving Situation Awareness based on Cloud Computing
주관기관 한국전자통신연구원 총괄책임자 최정단
참여기관 (책임자)
현대엠엔소프트㈜(하상태), ㈜리얼타임테크(김재광), ㈜쿠바(이상훈), ㈜테슬라 시스템(안웅), 전자부품연구원(김동순), 광주과학기술원(안효성), 건국대학교산 학협력단(하영국), 한국클라우드컴퓨팅연구조합(김진택)
총수행기간 2015. 3. 1 ~ 2018. 2. 28 ( 3 년) 협약기간 2015. 3. 1 ~ 2016. 2. 29 ( 1 년) 해당년도
수행기간 2015. 3. 1 ~ 2016. 2. 29 ( 12 개월) 협약기간
총사업비(천원)
정 부
출연금 7,200,000 민 간 부담금
현금 195,960
계 9,600,000 현물 2,204,040
해당연도 사업비(천원)
정 부
출연금 2,400,000 민 간 부담금
현금 65,320
계 3,200,000 현물 734,680
키워드 (6 ~ 10개)
자율주행 맵, 정적 맵, 동적 맵, 클라우드 서비스, 자율주행, 차량 위치 인식, 주행환경 인식, 지능형 자동차
정보통신․방송 연구개발 관리규정 제33조에 의거하여 연차보고서를 제출합니다. 2016년 01월 29일
총괄책임자: 최 정단 (인) 주관기관장: 이 상훈 (인)
미래창조과학부 장관 귀하
제목 차례
Ⅰ. 해당 연도 추진 현황 ··· 1
Ⅰ-1. 기술개발 추진 일정 ··· 1
Ⅰ-2. 해당 연도 추진 실적 ··· 2
1. 개발 목표 및 개발 내용 ··· 2
1.1 시스템 목표 및 연구내용 ··· 2
1.2 1차년도 실험 환경 ··· 5
2. 추진실적 요약 ··· 6
2.1 개발 성과요약 ··· 6
2.2 평가항목 ··· 8
2.3 평가항목 시험결과 요약 ··· 9
3. 추진실적 상세내용 ··· 10
3.1 세부 평가 항목 시험 내용 ··· 10
3.1.1 자율주행 맵 레이어 개수 ··· 10
3.1.2 자율주행 맵 구축 정확도(CEP) ··· 11
3.1.3 자율주행 맵 기반 위치 인식 정확도(CEP) ··· 16
3.1.4 자율주행 맵 기반 위치 인식 처리 속도 ··· 17
3.1.5 융합센서 기반 동적 데이터 검출 속도 ··· 18
3.1.6 자율주행 맵 갱신 속도 ··· 20
3.1.7 자율주행 맵 검색 속도 ··· 22
3.1.8 자율주행 맵 데이터 패키징 처리 속도(1MB 기준) ··· 25
3.1.9 종횡 추종 정확도(CEP) ··· 26
3.1.10 하위 제어기 동적 정확도(오차율) ··· 28
3.2 세부연구 추진내용 ··· 40
3.2.1 현대엠엔소프트(주) ··· 40
3.2.2 ㈜리얼타임테크 ··· 42
3.3.3 ㈜쿠바 ··· 49
3.3.4 ㈜테슬라시스템 ··· 54
3.3.5 전자부품연구원 ··· 58
3.3.6 광주과학기술원 ··· 61
3.3.7 건국대학교산학협력단 ··· 65
3.3.8 한국전자통신연구원 ··· 69
Ⅱ. 기술개발결과 ··· 90
Ⅱ-1. 기술개발결과물 ··· 90
1. 지식재산권 ··· 91
2. 논문 게재/발표 실적 ··· 91
3. 국제/국내 표준화 ··· 92
4. SW 등록 ··· 92
5. 기술문서 ··· 92
6. 시작품 제작 ··· 93
Ⅱ-2. 정성적 성과 ··· 94
1. 성과홍보 ··· 94
1.1 K-ICT 기술사업화 페스티벌 ··· 94
1.2 K-ICT 기술거래 설명회 참석 ··· 94
1.3 2015 창조경제박람회 참가 ··· 95
2. 대외포상 ··· 95
2.1 미래성장동력상 수상 ··· 95
Ⅱ-3. 고용창출효과 ··· 95
Ⅲ. 결론 및 차년도 계획 ··· 96
표 차례
표 1. 한국전자통신연구원 연구내용 ··· 2
표 2. 참여기관별 목표 및 연구내용 ··· 3
표 3. 기계적 변환 시간(Gear, ms) ··· 38
표 4. 2D맵기반 파일(Basemap)의 데이터 적재를 위한 스키마 ··· 43
표 5. 네트워크 데이터를 가공하여 적재하기 위한 스키마 ··· 43
표 6. 가공 처리된 네트워크 데이터를 적재하기 위한 서비스 DB 스키마 ··· 43
표 7. 입력 로드마크 데이터 구성 ··· 49
표 8. 위험상황예측 분석 시스템 환경 ··· 65
표 9. 오버샘플링 전/후 학습데이터 수 ··· 65
표 10. 군집 별 학습데이터 및 사고데이터 수 ··· 66
표 11. 분류분석 정오분표 ··· 66
표 12. Optimized parameters in case of ··· 71
표 13. DNN 학습 파라미터 ··· 79
그림 차례
그림 1. 전체 연구개발 목표 및 내용 ··· 2그림 2. 1차년도 실험 환경 및 내용 ··· 5
그림 3. L1 맵 레이어 표출 ··· 10
그림 4. L4 맵 레이어 표출 ··· 10
그림 5. 대덕터널 캘리브레이션 관측 망도 ··· 12
그림 6. 대덕터널 수준측량 노선도 ··· 13
그림 7. 점의조서 예 ··· 13
그림 8. 자율주행 맵 생성 및 정밀도 평가 ··· 15
그림 9. 차량위치 인식 기술 실험결과 ··· 16
그림 10. 위치인식 처리속도 평가 그래프 ··· 17
그림 11. 장애물 인식 결과 표출 ··· 18
그림 15. 공간 질의 연산자를 처리할 대상 맵 ··· 22
그림 16. nw_link table schema ··· 23
그림 17. 시험 프로그램 수행 시나리오 ··· 23
그림 18. 시험 프로그램 수행 화면 ··· 24
그림 19. 시험 프로그램 결과 화면 ··· 24
그림 20. 패키징 처리 속도 시험 시스템 구성 ··· 25
그림 21. 종횡 추종 정확도 시험 구간 ··· 26
그림 22. 동적 정확도를 위한 시나리오 모형 ··· 28
그림 23. CamSim의 기본 모델 ··· 28
그림 24. 시나리오 모델에 따른 CarSim에서의 시뮬레이션 구현 ··· 29
그림 25. 시뮬링크에서 동적정확도를 추출하기 위한 기본 모델 ··· 29
그림 26. 시나리오에 따른 데이터 추출 정보 ··· 30
그림 27 시나리오 따른 동적정확도 Normal과 제안된 오차비교 ··· 30
그림 28. 기어박스 제어를 위한 시나리오 모형과 변속기 기본시스템 모형 ··· 31
그림 29. 일반적인 차량 하중 모형 ··· 34
그림 30. 자동변속제어기 모델링 ··· 34
그림 31. 시뮬레이션 환경에서 RPM 대비 Engin Torque 비율 ··· 35
그림 32. Transmission subsystem ··· 35
그림 33. ShiftLogic에 대한 Gear 출력 시뮬레이션 결과 값 ··· 36
그림 34. Throttle, EngineRPM, VehicleSpeed 시뮬레이션 결과 값 ··· 36
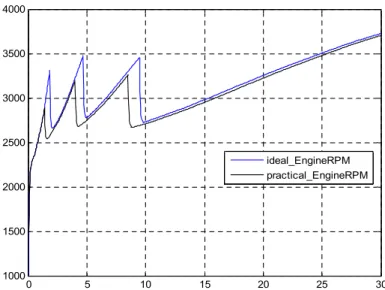
그림 35. ideal과 practical 간의 Engine RPM 비교 ··· 37
그림 36. ideal과 paractical간의 차량 속도 비교 ··· 37
그림 37. 서비스시나리오 동영상 스크린샷 ··· 39
그림 38. 비즈니스 모델 아이템 ··· 39
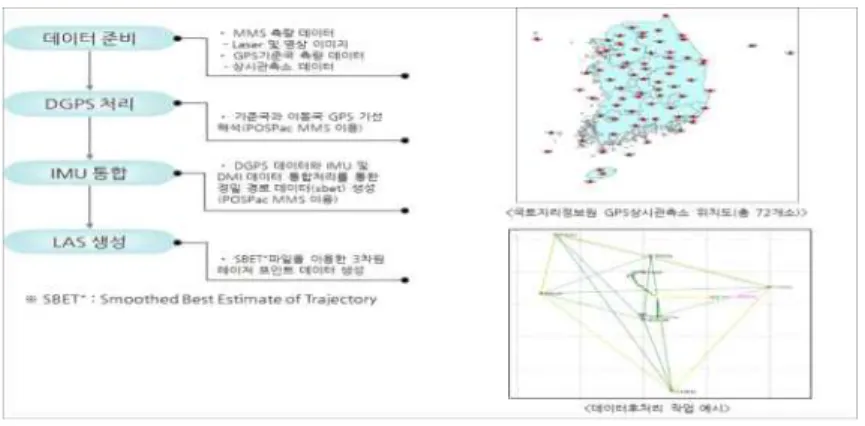
그림 39. 정밀지도 구축 작업 순서 ··· 40
그림 40. MMS 센서 스팩 ··· 40
그림 41. 후처리 작업 공정 ··· 41
그림 42. 원내 도화 예시 ··· 41
그림 43. 최종 구축 정밀 맵 컨텐츠 ··· 41
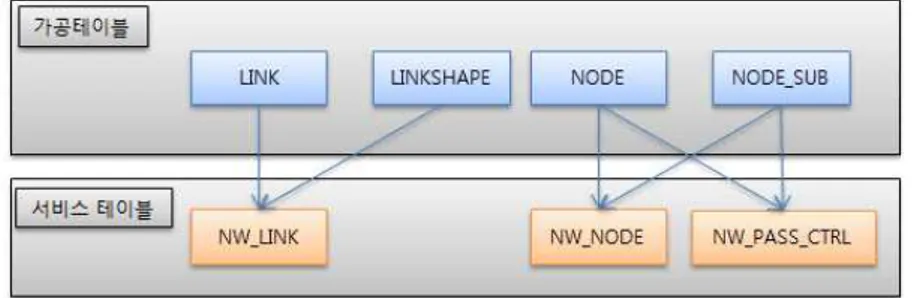
그림 44. 데이터 저장 관리 기술 시스템 개념도 ··· 42
그림 45. 스키마 설계 개념도 ··· 42
그림 46. 파일 및 데이터베이스 간 변환/적재 단계 ··· 44
그림 47. 로딩 과정 ··· 45
그림 48. 서비스 DB 테이블 Mapping 과정 ··· 47
그림 49. 도로 네트워크 데이터 모델의 테이블 구성도 ··· 47
그림 50. 일관성 검증 과정 ··· 48
그림 51. 입력 로드마크 데이터 로딩 화면 ··· 49
그림 52. Link Curve Fitting 방식 ··· 50
그림 53. Link Curve Fitting 실행 화면 ··· 50
그림 54. Building 데이터 생성 화면 ··· 50
그림 55. 주차 슬롯 데이터 생성 방식 ··· 51
그림 56. 주차 슬롯 데이터 생성 실행 화면 ··· 51
그림 57. 클라우드 서버 시스템 실행 화면 ··· 52
그림 58. 자율주행 차량 및 모바일 접속시 표출 화면 ··· 52
그림 59. 자율주행을 위한 경로 표출 및 차량 모니터링 표출 화면 ··· 53
그림 60. Car-Sharing 모바일 앱 S/W 모듈 구성도 ··· 54
그림 61. 프로토콜 처리 클래스 다이어그램 ··· 55
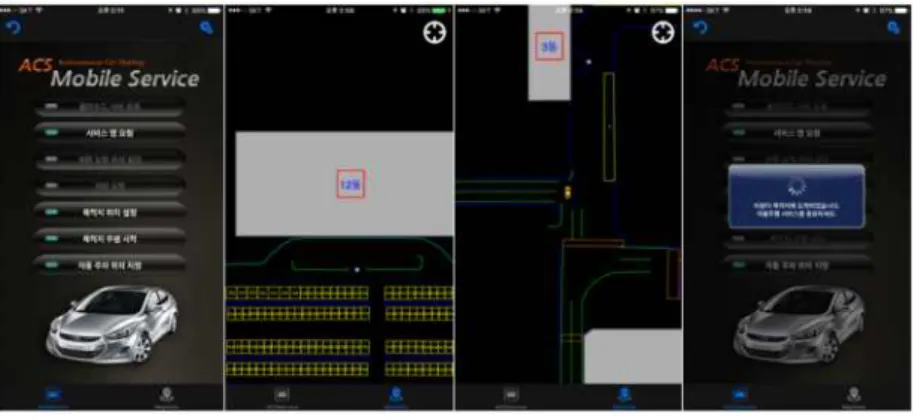
그림 62. 클라우드 서버 등록 요청 화면 ··· 55
그림 63. 서비스 맵 요청 화면 ··· 56
그림 64. 자율주행 차량 요청화면 ··· 56
그림 65. 목적지 자율주행 요청 화면 ··· 57
그림 66. 자동발렛 주차 요청 화면 ··· 57
그림 67. CarSim을 활용한 알고리즘 검증 환경 개요도 ··· 58
그림 68. 상황인식 시스템 블럭 구조도 ··· 58
그림 69. 상황인식 시스템 검증환경 구조도 ··· 59
그림 70. 상황인지 플랫폼 Memory IF, Display IF 테스트 환경 ··· 59
그림 71. 상황인지 플랫폼 PCIE IF, DMA, Controller 테스트 환경 ··· 60
그림 72. Four-wheel-driving vehicle model ··· 61
그림 73. 동적 모델 시뮬레이션 결과 ··· 62
그림 74. 최적 경로 탐색 알고리즘 ··· 63
그림 75. 최적 경로 주행 시뮬레이션 ··· 64
그림 76. 동적 경로 탐색을 위한 도로 데이터 모델링 ··· 64
그림 77. 고속도로 주행 빅데이터 반 위험상황 예측 시스템 수행 절차 ··· 65
그림 78. 클라우드 맵 기반 사고 예측 시스템 구성 ··· 67
그림 79. 충돌 위험 감지 실험 개략도 ··· 68
그림 80. 무인자동차를 이용한 교차로 위험 예측 실험 ··· 68
그림 81. 핵심선 특징 추출기의 응답특성 ··· 69
그림 82. Pillbox filter 근사화 ··· 70
그림 85. 높이정보 맵 품질향상을 위한 맵 합성필터의 의사코드 ··· 73
그림 86. 노면 주변 높이지도 생성 단계 ··· 74
그림 87. 도로 및 경체 추출 결과 ··· 74
그림 88. 2D 정적맵 생성 기술 구성도 ··· 75
그림 89. 정적맵 생성 기술 수행 예 ··· 76
그림 90. GTSRB 교통표지판 데이터 셋 ··· 77
그림 91. 데이터 셋 Annotation ··· 78
그림 92. Deep Neural Network 모델 ··· 78
그림 93. GTSRB 테스트 데이터 셋 인식 결과 ··· 79
그림 94. Car-Sharing 서비스 영역 및 서비스 시나리오 ··· 80
그림 95. Road Mark 데이터 및 차선 레벨 도로네트워크 데이터 ··· 81
그림 96. 차선 레벨 도로네트워크 데이터 표현 예시 ··· 81
그림 97. 자율주행을 위한 라우팅 결과 화면 ··· 82
그림 98. 그리드 맵 영역 ··· 82
그림 99. 그리드 맵의 그래프 구조 생성 단계 ··· 83
그림 100. 그리드 맵 영역에서의 자율주행 경로 생성 ··· 83
그림 101. 차량의 위치 인식 기술 구성도 ··· 84
그림 102. 영상 및 맵의 선간 거리 정의 ··· 84
그림 103. 차량위치 인식 수행예 ··· 86
그림 104. 인식결과 확대 영상 ··· 86
그림 105. 자율주행 차량의 라이다 센서 장착 모습 및 센서 검지 영역 ··· 87
그림 106. 장애물 인식 모듈 구성도 ··· 87
그림 107. Point Cloud 데이터 표출 ··· 88
그림 108. 라이다 데이터 획득 모듈 연동 차량 제어 시스템 ··· 88
그림 109. VoxelGrid를 활용한 Point Cloud 데이터 down sampling ··· 89
그림 110. 장애물 인식 결과(Clustering) ··· 89
그림 111. 카 쉐어링을 위한 스마트워치연동 모바일 자율주차관리시스템 시작품 개념도 93 그림 112. 클라우드 맵 데이터 생성용 차량 플랫폼 시작품 ··· 93
그림 113. K-ICT 기술사업화 페스티벌 채널A 전시기술 방송화면 ··· 94
그림 114. K-ICT 기술거래대전 행사 자료 ··· 94
그림 115. 창조경제박람회2015 ··· 95
Ⅰ. 해당 연도 추진 현황
Ⅰ-1 기술개발 추진 일정
(계획 : 실적 : )
1차년도 일련
번호 개발내용
추진 일정
달성도 1 2 3 4 5 6 7 8 9 10 11 12 (%)
1 계획수립 및 자료조사 2 자율주행 맵 데이터 구축 기술
개발 요구사항 정의 및 설계
(사업화 요구사항수렴) 100
시스템 개발 100
통합 및 테스트 100
3 자율주행 맵 데이터 저장/관리 및 클라우드 서비스 기술 개발
요구사항 정의 및 설계
(사업화 요구사항수렴) 100
시스템 개발 100
통합 및 테스트 100
4 주행 환경인식 기술 개발 요구사항 정의 및 설계
(사업화 요구사항수렴) 100
시스템 개발 100
통합 및 테스트 100
5 성능 검증용 EV 플랫폼 및 판단/제어 기술 개발 요구사항 정의 및 설계
(사업화 요구사항수렴) 100
시스템 개발 100
통합 및 테스트 100
6 통합 및 성능 검증용 응용
서비스 개발 100
7 클라우드 자율주행 맵 기반
비즈니스 모델 개발 100
8 자율주행 맵 컨텐츠 자동추출
알고리즘 연구 100
Ⅰ-2 해당 연도 추진 실적
1. 개발 목표 및 개발 내용 1.1 시스템 목표 및 연구내용
그림 1. 전체 연구개발 목표 및 내용
주관기관 연구 내용
한국전자통신연 구원
[자율주행 정적 맵 구축 기술 개발]
Ÿ 노면표시(차선, 방향표시, 건널목 등) 추출 및 모델링 기술 Ÿ 노면 주변 3차원 형상 인식을 통한 도로 및 경계 추출 기술 Ÿ 도로, 차선 모델링 및 2D 정적맵 생성 기술
Ÿ 차선별 정밀 도로 네트워크 데이터 추출 기술 Ÿ 도로 네트워크 및 정적맵 데이터 생성 기술
[자율주행 맵 클라우드 서비스를 위한 전송 규격 설계]
Ÿ 자율주행 맵 전송 프로토콜 설계
표 1. 한국전자통신연구원 연구내용
정밀도 50cm 이하 자율주행 맵, 제한 구역에서의 EV 플랫폼을 이용한 저속(20km/hr) 주행환경 인식 기술 개발
[자율주행 동적 맵 생성 및 V2V 연계 주행상황 인지 기술 개발]
Ÿ 클라우드 내 정적맵 데이터 수신 및 차량 자율주행 맵 갱신기술(C2V) Ÿ 융합센서 인터페이스 및 동기화 기술
Ÿ 정적맵 기반 저속주행 차량의 위치 인식 기술 (20 fps) Ÿ 저속주행 중 전방 및 주변 장애물 검출 기술 (20 fps) Ÿ 저속주행 중 차량주변 이동물체 검출 기술 (20 fps)
Ÿ 장애물 검출에 의한 동적 맵(L4) 생성 및 정적 맵 매핑 기술 [자율주행 성능검증을 위한 상황판단 및 제어 기술 개발]
Ÿ 제한구역에서의 자율주행 맵 기반 상황판단/제어 전략 설계 Ÿ 전역 라우팅 데이터를 이용한 지역 경로 생성 기술
Ÿ 지역경로 추종을 위한 제어 기술
Ÿ 주행 중 전방 장애물 검출에 의한 Stop & Go 판단 제어 기술
[표준개발: 클라우드 기반 자율주행 맵 공유 국제표준화 주도권 확보 및 산업체 요구사항 수용]
Ÿ 국내 외 표준개발 동향 파악(데이터 규격 및 속성 정보, 저장 원칙, 표준개발 방향) Ÿ 국내, 자동차공학회 자율주행표준위원회 활동을 통한 기 표준의 확장 가능성 여부
및 산업체 의견 수렴
Ÿ 자율주행 맵 공유 프레임워크 국내 단체표준 제안
Ÿ 국외, ISO, CEN, ETSI, OGC 등 국제표준회의 참석을 통한 주도권 확보
참여기관 목표 및 연구 내용
현대엠엔소프트
[목표] 정밀 도로 데이터 모델링
Ÿ 테스트베드 지역 2D 내비게이션 맵 데이터 커스터 마이징 Ÿ 자율주행 정적 맵 데이터 모델 설계
Ÿ 정밀 도로 네트워크 데이터 기반 자율주행 전역 라우팅 알고리즘 연구 Ÿ [표준개발:자율주행 맵 공유 프레임워크 국내 단체표준 제안(자동차공학회)]
리얼타임테크
[목표]자율주행 정적 맵(L0, L1) 데이터 저장관리 시스템 개발 Ÿ 메인메모리 기반 자율주행 맵 데이터 모델링
Ÿ 메인메모리 기반 자율주행 맵 데이터 저장 구조 설계 Ÿ 메인메모리 기반 자율주행 정적 맵 저장 기술
Ÿ 메인메모리 기반 자율주행 정적 맵 고속 질의처리 및 색인 기술
쿠바
[목표] 자율주행 맵 클라우드 서비스 기술 개발
Ÿ 자율주행 맵 원시 데이터 DBMS 마이그레이션 기술
Ÿ 자율주행 맵 클라우드 서비스를 위한 자율주행 맵 데이터 패키징 기술 Ÿ 자율주행 맵 클라우드 서비스 프로토콜 처리 기술
테슬라시스템
[목표] 차량 모바일 기반 자율주행 정적 맵 모니터링 기술 개발
Ÿ 차량 AVN 또는 모바일 기반 자율주행 맵데이터 프로토콜 처리 기술 Ÿ 차량 AVN 또는 모바일 기반 자율주행 정적 맵(L0, L1) 시각화 기술 Ÿ 차량 AVN 또는 모바일 기반 자율주행 실시간 모니터링 기술
전자부품연구원
[목표] 클라우드 맵 연계 자율주행 성능검증을 위한 20km/hr EV 플랫폼 개발 Ÿ 차량 조향, 속도제어, 기어변속 자동 제어를 위한 EV 플랫폼 액츄에이터 제어
표 2. 참여기관별 목표 및 연구내용
광주과학기술원
[목표] 클라우드 자율주행 맵 데이터 컨텐츠 자동추출 알고리즘 연구 Ÿ 클라우드 기반 자율주행 맵 정보 추출 기법 연구
Ÿ 위치 정보 기반 클라우드 맵 data contents 이용기법 연구 Ÿ 클라우드 기반 자율주행 차량용 비전센서 처리 기법 연구 Ÿ 비전센서를 통한 클라우드 기반 localization 알고리즘 연구
건국대학교
[목표] 빅데이터 수집 및 위험상황 판단 및 예측 모델 설계
Ÿ 자율주행 관련 빅데이터 분석 및 이를 이용한 자율주행 위험상황 판단 및 예측 모델 설계, 구축
한국클라우드 컴퓨팅연구조합
[목표] 클라우드 기반 partially 자율주행 비지니스 모델 개발 Ÿ 비지니스 모델 개발을 위한 협의회 구성 및 운영
Ÿ 시장 요구사항 분석 및 도출
1.2 1차년도 실험 환경
1차년도 목표는 다수개의 레이어로 구성된 정밀 맵의 레이어 2종을 생성하여 이를 이용하여 제 한된 구역내에서 자율주행 응용서비스를 구현하는 것이다. 이를 달성하기 위해 정적 데이터인 로드마크를 추출하여 모델링하고, 동적인 장애물을 인식하였으며, 클라우드 서버의 데이터베이스 저장을 위한 도로 네트워크를 설계하였다. 클라우드 서버로 부터 목적지까지의 경로를 전송받아 자율주행 응용서비스로의 적용은 실험의 용이성과 안전성을 고려하여 주관기관의 원내 도로 환 경을 선택하였다.
그림 2. 1차년도 실험 환경 및 내용
2. 추진실적 요약 2.1 개발 성과요약
1차년도 세부 연구내용에 속한 개발기술의 평가 항목에 대해 주요 수행 내용과 성과를 요약한 다.
세부연구
내용 성과지표 성과 비고
정적 맵 구축
Ÿ 기본 맵 레이어(로드마크) 추 출 및 모델링
- 맵 레이어 개수 2 - 맵 구축 정확도 50Cm - 위치 인식 정확도 30Cm Ÿ 맵 데이터베이스
- 맵 갱신 속도 500ms - 맵 검색 속도 16,000 tps - 맵 데이터 패키징 처리 속도
(1MB기준) 100ms
Ÿ L1은 MMS 차량과 ADAS 차량으로 수집한 로드마크 데이터이며, 이를 기반으로 정밀 도 로네트워크 데이터를 생성함, L4는 보행이동 체를 인식함
Ÿ 검증점 및 노선 측량을 이용한 측량 데이터 와 비교를 통한 맵 구축 정확도 달성
Ÿ 위치 측량 장비를 장착하고 지정된 시험구간 을 주행하여 위치인식 정확도 검증
Ÿ 클라우드 서버로 부터 다운받은 데이터와 주 행환경 인식 시스템에서 인식된 데이터를 매 핑하기 위한 것으로 100개 오브제트 기준 평 균 424.28 ms 달성
Ÿ 공간 검색 연산 수행 시간은 Kairos 에서 8 쓰레드를 백만번 이상 수행하여 16,179 tps Ÿ 클라우드 서버로 부터 제공되는 로드마크 데
이터 1MB 기준으로 83.79ms 처리 속도 달성 ※ 맵 데이터 레이어 설명
* L0: 기존 내비게이션 맵
* L1: 로드마크+정밀 도로네트워크 데이터 * L2: 랜드마크 + 종단구배(2.5D)
* L3: long time dynamic 데이터(공사, 사고, 날 씨 등)
* L4: short time dynamic 데이터(보행이동체 등) Ÿ 산출물: 국내 특허 2건, 해외 논문 1건, 국내
논문 1건, 설계문서 및 기술문서 다수
문서 확인
동적 맵 생성
Ÿ 동적 데이터 검출
- 동적데이터 검출속도 700ms
Ÿ 16CH LiDAR 센서이용하여 동적 장애물 20개 까지 인식 한다. 포인트 클라우드 데이터를 수신한 시간과 장애물 인식 기능을 수행한 시간으로 평균 436.85ms 달성
Ÿ 산출물: 국내 특허 1건, 해외 논문 1건, 국내 논문 1건, 설계문서 및 기술문서 다수
문서 확인
상 황 판 단 및 제어
Ÿ 정밀맵 활용 응용서비스 개발 - 위치인식처리 속도 15Hz - 종횡 추종 정확도 종방향
300Cm, 횡방향 100Cm - 하위 제어기 동적 정확도 5%
Ÿ 시험 구간 주행 시 센서 데이터 입력시간과 출력시간을 측정하여 처리속도 32.3953Hz e Ÿ 전역경로를 추종 제어 하도록 차량을 구동하 고, RTK 장비인 DGPS를 이용하여 추종하여 종방향 50.19Cm, 횡방향 20.46Cm 획득
문서 확인
- 기어박스제어 시간 700ms - 비지니스 모델 도출
Ÿ CarSim 과 시뮬링크 프로그램 연동에 따른 하위제어기 정확도 4.90% 달성
Ÿ 엔진출력과 하위제어기 동적정보로 부터 시 뮬레이션 결과 300ms 이하 달성
Ÿ 클라우드 맵 서비스 프로바이더 외 모델 도 출, 서비스 개념 동영상 제작
Ÿ 산출물: SCI 2건, 해외 논문 1건, 국내 논문 3 건, 국내특허 3건, 설계문서 및 기술문서 다수
클 라 우 드 서 비 스 를 위한 규격 설계
Ÿ 서버-단말간 ITS국제(ISO) 표 준 프로토콜 Part2개발
Ÿ 서버-단말간 ITS 국제(ISO) 표준 프로토콜 기 고서 달성
Ÿ 산출물: 국제 학회 논문 1건, 국제표준 기고서 3건, 국내 표준 1건, 설계문서 및 기술문서,
문서 확인
2.2 평가항목
평가 항목 (주요성능
Spec1)) 단위
전체 항목 에서 차지하
는 비중2)
(%)
세계최고 수준 보유국/
보유기업 ( / )
연구개발 전
국내수준 개발 목표치
평가 방법
성능수준 성능수준
1차 년도 (201
5년) 2차 년도 (201
6년) 3차 년도 (201
7년) 1. 자율주행 맵 레이어 개
수 개 5 4
(유럽/ERTICO
) N/A 2 4 4 자체 평가 2. 자율주행 맵 구축 정확
도 (CEP) cm 15 11
(독일/벤츠) N/A 50 20 10 수요기업 평가 3. 자율주행 맵 기반 위치
인식 정확도 (CEP) cm 15 10
(미국/구글) 15 30 20 10 수요기업 평가 4. 자율주행 맵 기반 위치
인식 처리 속도 Hz 15 24
(독일/벤츠) N/A 20 40 60 자체 평가 5. 융합센서 기반 동적
데이터 검출 속도 ms 10 500
(독일/벤츠) N/A 700 500 300 자체 평가 6. 신호등 인식 정확도,
처리 속도 %,Hz 5 12
(프랑스/Roboti
cs Center) 12 - 90, 20 95,
30 자체 평가 7. 자율주행 맵 갱신 속도 ms 5 - N/A 500 300 150 자체 평가 8. 자율주행 맵 검색 속도 tps 5 15,000
(한국/리얼타임
테크) 15,000 16,000 17,00 0 18,00
0 자체평가 9. 자율주행 맵 데이터 패
키징 처리 속도 (1MB 기준)
ms 5 N/A N/A 100 70 50 자체 평가 10. 종횡 추종 정확도
(CEP) cm,cm 5 150, 50
(독일/벤츠) N/A 300, 100 200,
80 150,
50 자체 평가 11. 하위제어기 동적정확
도 (오차율) % 5 3
(독일/ZF
group) 5 5 4 3 자체평가 12. 기어박스제어시간 ms 5 300
(독일/ZF
group) N/A 700 530 300 공인시험성 적서 13. 비즈니스 모델 도출
건수 (누적) 개수 5 - - 1 2 3 자체평가
2.3 평가항목 시험결과 요약
세부성과
목표 평가항목 및 목표 목표 대비 실적 달성
도
정밀도 50cm
이하 자율주
행 정적(L0, L1) + 동적 (L4) 맵 생성 및
제한구역에서 의 EV 플랫폼 을 이용한 저 속(20km/hr)
주행환경 인
식 기술 개발
1. 자율주행 맵 레이어 개수(2) 정적 맵 레이어(L1)
동적 맵 레이어(L4) 100%
2. 자율주행 맵 구축 정확도 (CEP)(50cm)
Ÿ MMS 기반: 8.5 cm
Ÿ Vision 기반: 48.35cm 100%
3. 자율주행 맵 기반 위치인식 정확 도(CEP)(30cm)
Ÿ 자율주행 맵 기반으로 하는
주행차량의 위치 인식 정확도: 29.25 cm
100%
4. 자율주행 맵 기반 위치 인식 처리 속도(20Hz)
Ÿ 자율주행 맵 기반으로 하는
주행차량의 위치 인식에 대한 처리 속도: 32.3953 Hz
100%
5. 융합센서 기반 동적 데이터 검출 속도(700ms)
Ÿ 멀티 센서 기반의 장애물 데이터
검출속도: 436.85ms 100%
6. 자율주행 맵 갱신 속도(500ms)
Ÿ 자율주행 차량의 주행환경 인식 시스템에 자율주행 맵 데이터 업데이트 완료 시간 424.28ms
100%
7. 자율주행 맵 검색 속도(16,000
tps) Ÿ 자율주행 맵 검색 속도: 16,179 tps 100%
8. 자율주행 맵 데이터 패키징 처리 속도(1MB 기준)(100ms)
Ÿ 클라우드 서버에서 자율주행 차량으로 전송하기 위한 맵 데이터 패키징 시간: 83.79ms
100%
9. 종횡 추종 정확도(CEP) (300cm, 200 cm)
Ÿ 종방향 추종 정확도: 50.19cm
Ÿ 횡방향 추종 정확도: 20.46cm 100%
10. 하위 제어기 동적정확도(오차율) (5%)
Ÿ 하위제어기 동적 정확도 오차율
4.9% 100%
11. 기어박스제어시간(700 ms) Ÿ 기어박스제어시간 500ms ~ 620ms 100%
12. 비즈니스 모델 도출 건수 (1건) Ÿ 클라우드 기반 partially 자율주행
비즈니스 모델 개발 100%
3. 추진실적 상세내용
3.1 세부 평가 항목 시험 내용 3.1.1 자율주행 맵 레이어 개수
Ÿ 개발 목표: 2개
자율주행 맵 데이터는 다음과 같이 정의한다.
* L0: 기존 내비게이션 맵
* L1: 로드 마크 + 정밀 도로네트워크 데이터
* L2: 랜드마크 + 종단구배(2.5D)
* L3: long time dynamic 데이터(공사, 사고, 날씨 등)
* L4: short time dynamic 데이터(보행이동체 등)
1차년도 목표 레이어는 L1, L4에 해당하며, L1은 MMS 또는 ADAS차량으로부터 수집되어 가 공된 로드마크 데이터와 이를 이용하여 생성되는 정밀 도로네트워크 데이터를 의미한다.
L4는 자율주행 차량의 센서에 의해서 인식된 이동 장애물을 의미하며, 목표 레이어 개수를 확인 하는 방법은 모니터링 프로그램에 의한 육안으로 확인을 수행한다.
L1 맵 레이어
그림 3. L1 맵 레이어 표출
클라우드 서버 시스템 모니터링을 통해 확인
L4 맵 레이어
그림 4. L4 맵 레이어 표출
자율주행 차량 주행환경 인식 시스템 모니터링을 통해 확인
3.1.2 자율주행 맵 구축 정확도(CEP) Ÿ 개발 목표: 50cm
3.1.2.1 MMS 기반 구축 정확도 실험
MMS(Mobile Mapping System)장비를 이용하여 취득된 데이터의 정확도를 평가하기 위해 기준점 측량을 실시하였다.
○ 평가 방법 : 도로면 표면에 위치한 방향표시 및 차선에 대한 검증점을 측량하여 MMS에서 취득된 데이터(Point Cloud Data)의 실제 같은 위치를 비교하여 평가를 진행하였다.
○ 대상 구역 : 4구간 (대전 대덕터널, 파주시 국도, 용인 법화터널, 안양시청 부근)
< 측량 현황 >
측량 구간명
검증점 측량 노선측량
측량 총연장
(m)
측량 Point 측량 (개)
연장(m)
터널안 검증점 측량 Point(개)
측량 연장 (m)
터널밖 검증점
측량 Point(개)
측량 연장 (m)
측량 Point
(개)
대덕터널(대전) 473.4 28 610.81 37 610.81 88 1695.02 153
법화터널(용인) 1911.26 52 37.88 10 300.12 117 2249.26 179
안양시청(안양) - - 3609.31 97 검증점 측량만
실시 3609.31 97
파주(파주) - - 751.96 30 920.09 83 1672.05 113
총 계 2,384.66 80 5,009.96 174 1,831.02 288 9,225.64 542
○ 조사 방법
- 검증점 및 노선측량 : 검증점 및 노선측량을 위하여 각 구역 별 망도를 이용하여 측량을 실시하였다. 구역에 따른 국토지리정보원에서 제공하는 기준점 성과(통합기준점)을 이용하여 작 업구역에 삼각 망도를 구성하였으며 4급 기준점에 준하는 기준으로 측량을 실시하였다.
○ 정확도 검증 측량 현황
< 측량 현황 >
측량 구간명
검증점 측량 노선측량
측량 총연장
(m)
측량 Point 측량 (개)
연장(m)
터널안 검증점 측량 Point(개)
측량 연장 (m)
터널밖 검증점
측량 Point(개)
측량 연장 (m)
측량 Point
(개)
대덕터널(대전) 473.4 28 610.81 37 610.81 88 1695.02 153
법화터널(용인) 1911.26 52 37.88 10 300.12 117 2249.26 179
안양시청(안양) - - 3609.31 97 검증점 측량만
실시 3609.31 97
파주(파주) - - 751.96 30 920.09 83 1672.05 113
총 계 2,384.66 80 5,009.96 174 1,831.02 288 9,225.64 542
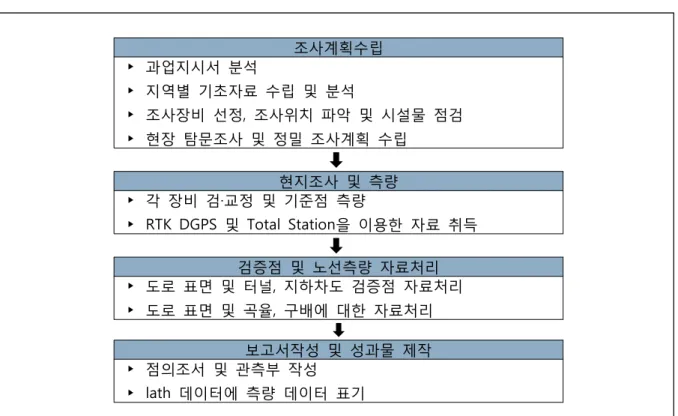
조사계획수립 ▸ 과업지시서 분석
▸ 지역별 기초자료 수립 및 분석
▸ 조사장비 선정, 조사위치 파악 및 시설물 점검 ▸ 현장 탐문조사 및 정밀 조사계획 수립
현지조사 및 측량 ▸ 각 장비 검·교정 및 기준점 측량
▸ RTK DGPS 및 Total Station을 이용한 자료 취득
검증점 및 노선측량 자료처리 ▸ 도로 표면 및 터널, 지하차도 검증점 자료처리 ▸ 도로 표면 및 곡율, 구배에 대한 자료처리
보고서작성 및 성과물 제작 ▸ 점의조서 및 관측부 작성
▸ lath 데이터에 측량 데이터 표기
· 작업 순서도
○ 지역별 조사 결과(대전-대덕터널) - 검사점 측량과 노선 측량
대덕터널 구간은 검증점 측량과 노선 측량을 실시하였으며 그 길이는 1,695.02m이며 측량 Point는 터널을 포함한 검증 65점과 노선 88점으로 총 153점을 측량하였으며 측량을 실시하기 전 통합기준점(U대전16, U대전17, U대전19, U대전41)을 이용하여 망도를 구축하였으며 캘리 브레이션의 평균오차는(수평잔차:0.0043m 수직잔차:0m)로 확인되었다.
그림 5. 대덕터널 캘리브레이션 관측 망도
- 수준 측량
대덕터널의 터널 구간에는 RTK방식이 아닌 광파측정기(Total Station)의 방식을 사용하였으며 관측 망도를 사용한 RTK로 공공측량기준점(4급 기준점 측량)에 의거하여 TP점을 확보하여 터널 내 광파측정기(Total Station)로 측량을 실시함에 있어 표고오차 확인을 위하여 직접 수준 U대 전41(통합기준점)에서 TP1 까지 약 1.7km 왕복수준 측량을 실시한 결과 수준 오차는 0.004m 로 측량에 이상이 없음을 확인하였다.
그림 6. 대덕터널 수준측량 노선도
- 점의조서
그림 7. 점의조서 예
- 대덕터널 검증점과 MMS분포도의 잔차 및 수평위치, 표고위치오차는 다음과 같이 나타났다.
3.1.2.2 Vision 기반 구축 정확도 실험
○ 자율주행 맵 구축정확도 측정 방법
- 지정된 시험구간을 정밀 측량장비를 사용하여 실측함.
- 지정된 시험구간을 자율주행 정적 맵 구축 시스템을 이용하여 맵을 생성함.
- 실측 데이터와 생성데이터를 비교하여 정확도 평가 (평가 척도: CEP (Circular Error Probability) )
<참고> CEP (Circular Error Probability, 원형 공산 오차)
CEP는 2차원 오차 평가 방법의 하나로, 취득된 전체 샘플 중 정확도가 50% 안에 드는 원의 반지름을 의미하며, GPS 등의 2차원 위치 측위 시스템의 성능을 평가하는데 많이 사용된다. 수 학적인 계산 방법은 종축 및 횡축의 오차를 각각 , 라고 하고 Gaussian 분포를 가진다고 할 때 이들의 연결 분포를 다음과 같이 정의 할 수 있다.
p
이때 CEP는 50%를 가져야 하므로, 다음의 식을 푸는 것으로 해를 찾을 수 있다.
p ≦
본 연구에서는 위의 식을 간단히 풀기 위해 총 개의 샘플이 있다고 할 때 모든 샘플에 대해
의 값을 구한 뒤, 이를 정렬한 후 번째 값으로부터 CEP를 구하는 방법을 사용하였 다.○ 자율주행 맵 구축정확도 측정 결과
시스템 환경
측정장비: Trimble 사의 R5 GNSS 측량장비 운영방법: Network RTK
장비사양: Horizontal 8 mm, Vertical 15 mm 측정샘플수: 243 개
측정 결과 CEP: 48.35 cm
그림 8. <자율주행 맵 생성 및 정밀도 평가: (a) 생성된 자율주행 맵, (b) 대상지역(황색상자) 및 측량점(적색점), (c) 측량장비(Trimble R5) 및
측량모습 >
3.1.3 자율주행 맵 기반 위치 인식 정확도(CEP) 개발 목표: 30 cm (CEP)
○ 자율주행 맵 기반 위치인식 정확도 측정 방법
- 위치 측량 장비(정밀 DGPS)를 장착하고 지정된 시험구간을 주행
- 자율주행 맵을 이용한 위치 인식 결과 및 DGPS 로깅 데이터를 동시에 취득
- 위치 인식 결과 및 DGPS 데이터를 비교하여 위치인식 정확도 비교하여 평가 (평가 척도:
CEP(Circular Error Probability) )
그림 9. <차량위치 인식 기술 실험결과: (a) 차량주행 경로, (b) 횡축 오차 분포, (c)종축 오차 분포>
○ 자율주행 맵 기반 위치인식 정확도 측정 결과
시스템 환경
측정장비: Oxford Technical Solutions사의 RT2000 정밀 GPS/INS - 정밀도: 2 cm
위치인식 장비:
- 제어기: Intel i7-4790K 4GHz - 카메라: PointGray Blackfly 샘플데이터: 2881개
측정 결과 CEP = 29.25 cm
3.1.4 자율주행 맵 기반 위치 인식 처리 속도 개발 목표: 15 Hz
○ 자율주행 맵 기반 위치인식 처리 속도 측정 방법
- 지정된 시험구간을 주행하면서 센서데이터 입력 시간 측정: t0 - 위치인식 시스템에서 위치인식 결과 출력 시간 측정: t1 - 초당 위치 인식 처리 속도 1 / (t1 t0) 측정하여 평가
25 30 35 40 45 50 55
Time (ms) 0
50 100 150 200 250 300 350 400
450 The processing time distribution
그림 10. 위치인식 처리속도 평가 그래프
○ 자율주행 맵 기반 위치인식 처리 속도 측정 결과
시스템 환경
위치인식 장비:
- 제어기: Intel i7-4790K 4GHz - 카메라: PointGray Blackfly 시간측정방법:
- System Performance Counter - 정밀도: < 1us
샘플데이타: 2881 개 평균처리 시간: 30.8783 ms
3.1.5 융합센서 기반 동적 데이터 검출 속도 개발 목표: 700ms
동적 데이터 검출을 위해 본 과제에서는 차량에 3대의 16채널 라이다(LIDAR) 센서를 장착한 후, 해당 데이터로부터 동적 데이터 검출을 수행한다. 실험은 차량을 주행하면서 주변 장애물을 검출하고, 해당 장애물 검출에 소요된 시간을 측정한다.
LIDAR 센서를 활용함으로써 기본 데이터는 Point Cloud가 된다. 아래 화면은 수신한 데이터를 이용하여 장애물 검출 기능을 수행한 결과 화면이다. 녹색의 작은 점은 센서에서 획득한 Point Cloud 데이터 이며, 장애물로 검출된 데이터는 흰색부터 붉은색까지 표현되어 있다. 검출된 Point Cloud 중 의미있는 데이터를 추출한 뒤 장애물로 인식한 결과를 사각형의 박스로 표현하 였다. 현재 장애물 인식은 총 20개까지 가능하며, 동적 데이터 뿐만 아니라 정적 데이터도 함께 검출 할 수 있도록 되어 있다.
그림 11. 장애물 인식 결과 표출
장애물 검출 기능은 차량제어 시스템과 연동하여 긴급정지, 회피, 추종 등의 기능을 수행하게 된 다. 아래 그림은 차량제어 시스템에 연동된 장애물 검출 시스템의 화면이다. 좌측면은 Point Cloud 및 장애물 검출 결과를 보이며, 오른쪽은 검출된 장애물에 대한 세부적인 데이터를 보인 다. 좌측의 화면에서는 처리속도를 위해 Point Cloud를 3D가 아닌 2D로 표현했으며, 이때 검 출된 장애물의 주요 위치가 붉은색 사각형으로 표현되어 있다.
그림 12. 차량 주행상황인식 시스템과 통합된 장애물 검출 기능 UI
장애물 검출 속도는 LIDAR 센서로부터 데이터를 획득한 시점부터 장애물 인식에 소요된 시간을 측정한다. 측정 방법은 다음과 같다.
○ 동적 데이터 검출 속도 측정 방법 데이터 검출 속도
Ut
Ut = te - ts
단위:ms
ts: Point Cloud 데이터를 수신한 시간
te: 장애물 인식 기능을 수행하여 장애물 정보를 생성 완료한 시간
○ 동적 데이터 검출 속도 측정 결과
시스템 환경
Laptop Computer - CPU: Core i7, 2.7 GHz - RAM 16GB
측정 결과 장애물 검출 시간
평균: 436.85ms, 표준편차: 66.46
3.1.6 자율주행 맵 갱신 속도 Ÿ 개발 목표: 500ms
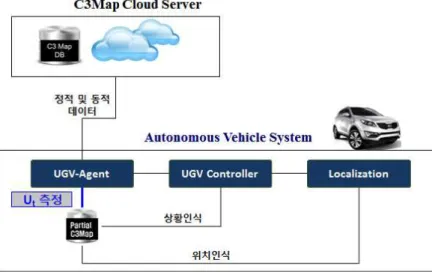
자율주행 차량에서 사용하는 자율주행 맵 데이터는 정적 데이터와 동적 데이터가 있다. 이는 클 라우드 서버로부터 다운로드 받아서 활용한다. 정적 데이터는 자율주행 차량에서 1. 차량의 위 치 인식(Localization), 2. 센서 데이터와 맵 데이터의 매핑에 의한 상황인식에 활용된다. 동적 데이터(맵 레이어 L3)는 자율주행 차량에서 회피 / 후회 등을 위하여 활용된다. 아래 그림과 같 이, 자율주행 차량이 주행을 시작하기 전에 자율주행 구간에 해당하는 자율주행 맵 데이터를 클 라우드 서버로부터 요청하고, 데이터를 수신하여 자율주행 차량 시스템 내 데이터베이스에 기록 한다.
그림 13. 자율주행 맵 갱신 속도 측정 시험 시스템 구성
UGV-Agent 프로그램은 클라우드 서버 시스템과의 통신 프로토콜을 처리하는 역할을 수행하며, 해당 프로토콜에 정의된 자율주행 맵(정적 또는 동적)을 수신 받아 로컬 데이터베이스를 생성한 다. 자율주행을 수행할 때 UGV Controller, Localization 프로그램은 데이터베이스에 기록된 자 율주행 맵을 질의하여 활용한다.
그림 14. 자율주행 맵(로드마크) 데이터 상세 내용
자율주행 맵 갱신 속도는 UGV-Agent 프로그램이 자율주행 차량 시스템 내의 로컬 데이터베이 스에 데이터를 기록하는 시간을 측정한다. 데이터는 위의 그림과 같은 클라우드 맵 데이터를 활 용한다. 클라우드 맵의 정적 및 동적 데이터는 기하공간 정보인 Geometry 형태로 되어 있으며 점, 선, 면 객체로 구성이 된다. 본 실험에서는 공간 객체 100개 오브젝트 기준 자율주행 차량 시스템의 로컬 데이터베이스에 데이터를 업데이트 하는 시간을 측정하였다. 측정 방법은 다음과 같다.
○ 맵 갱신 속도 측정 방법 갱신 속도 Ut Ut = te - ts
단위:ms
ts: 클라우드 서버로부터 다운로드 받은 자율주행 맵 데이터 입력 시작 시간
te: 주행환경 인식 시스템에 자율주행 맵 업데이트 완료 시간
○ 맵 갱신 속도 측정 결과
시스템 환경
Rugged Controller - CPU: Core i7, 2.1 GHz - RAM 8GB
측정 결과 Geometry 개수 1009개 업데이트 시간 평균 4281ms
100개 오브젝트 기준 Update Time = 4281ms * 100개 / 1009개 = 424.28 ms
3.1.7 자율주행 맵 검색 속도 Ÿ 개발 목표: 16,000 tps
Ÿ 시험 내용
- 클라이언트로부터 요구되는 자율주행용 고정밀 맵에 대한 검색 속도를 측정
- 주어진 공간 질의 도형 ( 테스트베드 지역의 정밀 맵 데이터 영역 대비 100분의 1 영역) 내 의 공간 객체에 대한 검색 (Intersect 연산) 질의 처리 속도를 측정 ( 단위: TPS(Transaction Per Seconds) )
그림 15. 공간 질의 연산자를 처리할 대상 맵
위의 그림과 같은 맵에 임의의 100분의 1 영역에 대한 공간 검색 (Intersect 연산)을 수행하여 질의 처리 속도를 측정한다. 수행할 검색 연산은 다음과 같은 질의로 질의의
‘?’ 에 임의의 영역을 지정하여서 검색 연산을 수행한다.
"select count(*) from nw_link where st_intersects(geometry, st_polyfromtext(?,1))=1;"
Ÿ 시험 환경
자율주행 맵 검색 속도 측정은 win32 console application 으로 다음과 같은 환경에서 수행 했다.
- 운영체제 : Window 7 64bit
- 프로세서 : Intel(R) Xeon (R) CPU X5650 2.67GHz, 2.66GHz 24스레드 - 메모리 : 80.0 GB
- 서버 : Kairos Ver5 64bit
- 대상 테이블 : nw_link (서비스 DB link 테이블 ) - 대상 테이블 레코드 개수 : 1,869,316
- 대상 테이블 스키마
그림 16. nw_link table schema
Ÿ 시험 방법
시험은 자율주행 맵을 공간검색(Intersect 연산)하는 시험 프로그램을 작성하여 수행 한다. 시험 프로그램은 win32 console application기반으로 작성되었으며, 시험 프로그램명은 IntersectPerfTest.exe 이고, 64bit 기반으로 컴파일 되었다.
시험 프로그램은 아래 그림과 같은 방법으로 수행되고, 성능을 측정하며, 결과를 출력 한다.
그림 17. 시험 프로그램 수행 시나리오
Ÿ 시험 수행
시험은 win32 console application으로 수행하였다. 다음은 수행 동작 화면을 캡쳐한 것으로 8개의 스레드에 1,200,000 개의 검색 질의를 수행하는 모습을 보여준다. 각각의 스레드가 검색 연산을 수행하고, 1,000 개의 연산 수행 마다 프린트문을 출력을 한다.
그림 18. 시험 프로그램 수행 화면
시험은 결과는 다음 그림과 같이 출력되는데, 8개의 쓰레드로 1,200,000 번의 검색 성능 테스트 시 수행 시간은 74.16sec 로 16179.76 TPS 의 결과를 얻을 수 있다.
그림 19. 시험 프로그램 결과 화면
Ÿ 시험 결과
시험은 동일한 환경에서 8개의 쓰레드로 1,200,000 번의 검색을 여러 번 수행 후 평균 값으로 측정하였다.
수행 시간 (sec) 성능 결과 (TPS)
1 74.811406 16040.33
2 76.149063 16183.62
3 74.167754 16179.76
4 71.686472 16739.56
5 73.997059 16216.86
6 70.954995 16912.13
7 72.881047 16465.19
8 72.250028 16608.99
9 72.576441 16534.29
10 72.149945 16632.03
시험 결과는 평균 수행 시간 73.16 sec 이고, 평균 성능 결과는 16451.28 TPS 이다. 이 결 과는 자율주행 맵 공간검색에 대한 개발목표를 만족함을 알 수 있다.
3.1.8 자율주행 맵 데이터 패키징 처리 속도(1MB 기준) Ÿ 개발 목표: 100ms
클라우드 서버에서는 차량 또는 단말의 요청에 의해 자율주행 맵 데이터를 제공한다. 1차년도 클라우드 서버에서 제공하는 자율주행 맵 데이터는 로드마크 데이터이다.
아래 그림과 같이, 클라우드 서버에서는 요청에 의해 해당 데이터베이스 시스템으로부터 데이터 를 질의하고 데이터를 패키징하여 바이너리 파일을 생성한다. 이는 클라이언트(차량 또는 단말) 로 전송하기전에 맵 데이터 크기를 줄이기 위한 목적이다. 패키징 된 파일은 프로토콜 처리 모 듈에 의해서 클라이언트로 전송된다.
그림 20. 패키징 처리 속도 시험 시스템 구성
패키징 처리속도 측정 방법은 다음과 같다.
○ Packaging 처리 속도 측정 방법 갱신 속도 Pt Pt = te - ts
단위:ms ts: 자율주행 맵 Packaging 모듈 입력 시작 시간 te: Packaging 파일 생성 시간
패키징 대상 데이터 셋은 그림 14과 같다.
패키징 처리 속도 측정 환경 및 결과는 다음과 같다.
○ Packaging 처리 속도 측정 결과
시스템 환경
Cloud Server 컴퓨터
- CPU: Core i7-4710HQ, 2.5 GHz - RAM 16GB
측정 결과 10회 수행 후 평균 시간: 15 ms
1 MB 기준 Packaging Time = 1000kb * 15ms / 179kb = 83.79 ms
3.1.9 종횡 추종 정확도(CEP)
Ÿ 개발 목표: 종방향 300cm, 횡방향 100cm
종횡 추종 정확도는 서버로부터 전역경로를 수신한 후 차량제어시스템에서 해당 전역경로를 어 느정도 정확도를 가지고 추종하는지 평가한다. 이를 위해 RTK-GPS 장치를 차량에 장착한 후 차 량의 주행 경로를 기록하고, 수신한 전역경로와 주행경로의 오차를 비교하여 정확도를 계산한다.
종횡 추종 정확도는 아래와 같은 순서로 진행한다.
1) 자율주행 맵 기반 전역 경로 데이터 추출
2) 전역 경로를 추종 제어하도록 차량 구동, DGPS 장비를 이용하여 추종 로깅
3) 전역 라우팅 데이터와 로깅 데이터를 비교하여 정확도 평가 (평가 척도: CEP(Circular Error Probability) )
실제 실험은 아래 그림과 같다. 실험 주행은 ETRI 원내에서 수행되었으며, 약 700m 의 구간을 주행하여 결과를 산출하였다. 실험 주행 구간에는 세 번의 좌회전과 네 번의 우회전을 포함하고 있으며, 오르막 경사구간 주행을 포함하고 있다.
그림 21. 종횡 추종 정확도 시험 구간
종횡 추종 정확도 측정 방법은 다음과 같다.
○ 종횡 추종 정확도 측정 방법 정확도 Ep = Wp - Vp
단위:cm Wp : 전역 경로 Vp : 차량 주행 경로
종횡 추종 정확도 측정 환경 및 결과는 다음과 같다.
○ 종횡 추종 정확도 측정 결과
기준 시스템
RTK-GPS 장비
- Horizontal Position Accuracy(RTK): 0.008m - Vertical Position Accuracy(RTK): 0.015m
측정 결과
- 종방향 추종 정확도
. CEP50: 50.19cm, 최대오차: 140.98cm - 횡방향 추종 정확도
. CEP50: 20.46cm, 최대오차: 64.83cm
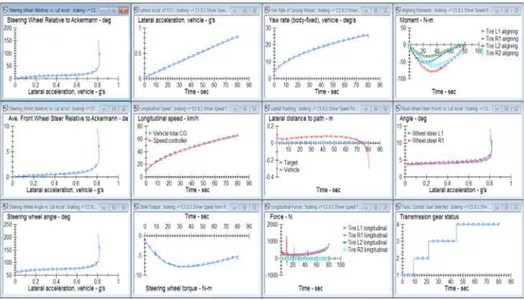
3.1.10 하위 제어기 동적 정확도(오차율) Ÿ 개발 목표 : 5%
무인자동차에서 모터에 역으로 걸리는 저항을 다이나모에서 재현시키고, 동특성 시뮬레이션을 통 해 검증하는 목적으로 가지고 있으나 당해 연도는 관련된 자율형 자동차에 모터 정보의 다이나모 정보를 수집할 수 없기 때문에, Casim 시뮬레이터를 통한 시나리오 정의하고 다이나모 환경과 동 일한 정보를 가정하여 이를 추정한다. 해당 기본 시나리오 모델은 아래와 같은 구성을 갖는다.
그림 22. 동적 정확도를 위한 시나리오 모형
위 그림의 기본 시나리오 모형 Ideal을 올바른 진행 경로라고 할 때 Practical은 자동차의 실제 주 행경로가 된다. 따라서 동적정확도는 올바른 진행경로와 실제 주행경로의 차(ε)로 판단될 수 있다.
다이나모메타(Dynamo meter)는 샤시계를 제외하면 엔진 동력과 트랜스미션의 변화량에 따른 측 정시간으로 시간(t)에 따른 성능(Performance)로 정의되며, 이를 수식 (1)과 같이 나타낼 수 있 다.
동적 정확도: 오차율(εp)= |ideal Practical| (1)
동적 정확도에 대한 상세한 시뮬레이션과 구현 내용은 CarSim의 벤츠 B-class 모델과 위의 그림 에 따른 시나리오 모델로 CarSim의 Test Specifications을 통해 아래와 같이 구성하였다. 아래 그 림은 CarSim 프로그램을 나타낸다. 위의 그림에 대한 시나리오 모델을 구축하기 위해 A-Class, Hatchback으로 설정하고, 곡선 도로를 생성하기 위해 Procedure에서 understeer, 40-m Radius Circle로 설정함으로써 위 그림의 시나리오 모델에 대한 외부 환경을 구축한다.
그림 23. CamSim의 기본 모델
위 그림의 설정에 따른 외부 환경 구축이 그림 22의 시나리오 모델과 동일한지를 확인하기 위하 여 Result의 Animate를 통해 확인할 수 있다. 그리고 차량의 휠에 받는 힘을 화살표로 나타내어준 다. 정확한 분석을 위해서는 위 그림의 Plat을 클릭하면 아래 그림과 같이 나타난다. CarSim 프로 그램은 Simulink와 연동된다. Simulink는 CarSim의 차량 모델에 대한 제어 모듈 엔진을 구성한다.
제어 모듈에는 ASB Control Module, ESC Control Module, Transmission Module 등이 있다.
즉, CarSim에서 Simulink의 제어 모듈에 필요한 외부 입력 데이터를 전달한다. 이 데이터를 Simulink에서 입력 받아서 제어 모듈이 동작하여 출력 데이터를 생성하고, 이 데이터를 다시 CarSim의 차량 모델로 전달되어 차량이 제어되면서 운행된다.
그림 24. 시나리오 모델에 따른 CarSim에서의 시뮬레이션 구현
외부 환경에 따른 Simulink의 제어 모듈이 동작함에 따른 차량 모델에 반영되는 정보들을 아래 그림과 같이 추출할 수 있다.
그림 25. 시뮬링크에서 동적정확도를 추출하기 위한 기본 모델
그림 26. 시나리오에 따른 데이터 추출 정보
위 그림과 같은 추출정보를 기반으로 아래의 값과 같이 시나리오에 따른 추출정보를 도출할 수 있 다.
그림 27 시나리오 따른 동적정확도 Normal과 제안된 오차비교
위의 그림은 CarSim에서 정의한 Ideal한 범위 그리고 기본 시뮬레이션에서 차량의 오차범위 추출 된 결과, 마지막으로는 제안된 알고리즘과 Ideal의 오차범위를 나타내었다. 동일시나리오에서 Normal은 평균 6.09%가 나온 반면 본 제안된 방법을 적용하였을 때는 4.90%의 오차로 정량적 목표에 부합됨을 알 수 있었다.
3.1.11 기어박스제어시간 Ÿ 개발 목표 : 700ms
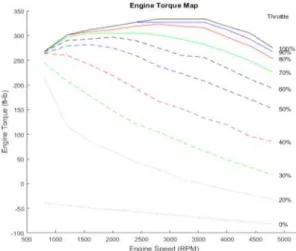
기어박스 제어시간은 RPM에 따른 기어박스 제어시간으로 기업박스는 엔진출력과 연관성을 갖는 다. 따라서 기어박스 제어시간을 달성하기 위해서는 시제품 자동차에서 rpm의 변화와 엔진 출력 그리고 하위기 동적정보가 요구된다. 이를 기반으로 전달시간과 기계적 변환시간 그리고 응답시간 을 계산 혹은 측정할 수 있다. 하지만 1차년도에 시제품 실차에 대한 기계적 변환시간과 동적정보 를 획득 할 수 없기 때문에 ‘자동차 시뮬레이터인 CaSim’을 이용하여 기본과 제안알고리즘의 변속 기(Transmission)의 변화량을 획득하고 이를 반영한다. 기본 시나리오는 하위제어기 동적정확도와 동일하다. 해당 기본 시나리오 모델은 아래와 같은 구성을 갖는다.
그림 28. 기어박스 제어를 위한 시나리오 모형과 변속기 기본시스템 모형
위 그림의 기본 시나리오 모형 Ideal을 올바른 진행 경로라고 할 때 Practical은 자동차의 실제 주 행경로로 정의한다면, Practical를 나타내는 주행경로로 발생하는 rpm, 구동력, 토크와의 연관성에 따른 변속 시간의 차(εt)로 판단될 수 있다. 수식 (1)과 같이 나타낼 수 있다.
기어박스 제어시간: 변속시간(εt)= |ideal – Practical| (1)
ideal, Practical 은 속도와 rpm 그리고 토크와 rpm 관계가 정의되어야 한다. 이에 따라서 차량 구동에 의해서 실제 구동식은 아래와 같이 나타낼 수 있다. 실제 구동력(Preal)은 차량 구동력(F)은 전체 저항(Rl)의 차이이며 전체 저항은 공기저항(Ra), 시나리오에 따른 경사 저항(Ri)과 회전저항(Rr) 으로 타나낼 수 있다. 공기저항과 회전저항은 주행저항()에 포함되며. 구동력은 (2)와 같이 정의
실제 구동력 : Preal = (2)
Ideal의 구동력(Fideal)은 구동토크(Tkgf·m), 동력저항효율(n), 주행저항()으로 판단된다. 구동토 크와 동력저항 효율은 엔진토크(), 기어의 변속비(), 종감속비()로 나타낼 수 있다.
구동력 :
××
(3)
차량의 속도()는 차량 구동륜의 유효반경(), 엔진회전비( )에 비래하고 변속비()와 토 크()로 반비례하며 이와 같은 수학적 모델은 다음과 같이 나타낼 수 있다.
차량의 속도 :
××
××
(4)
엔진토크() 는 다음과 같이 나타낼 수 있다.
엔진토크(): 0.252+6.94×
×
×
×
×
×
(5)주행저항은 수식(2)의 전체 저항과 같으며 주행저항은 세부적으로 차량저항과 구름저항으로 나타 낼 수 있다. 차량 저항은 CaSim 모델의 차량저항 값(벤츠 B-Class, 0.27)을 반영, 투영면적(벤츠 B-Class 2.20)를 갖는다. 또한 공기밀도(1.2)와 자동차에 대한 상대속도 구름저항은 구름 저항계수와 차륜에 가해지는 하중으로 나타낼 수 있다.
구름저항계수는 회전저항으로 타이어와 노면사이에서의 에너지 손실을 타나낸다. 이때 구름저항의 계수는 노면 저항과 공기저항이 가장 큰 비중을 차지하며 나머지 값은 일정 토크이상일 때 수렴할 수 있다.
전체주행저항() : PALL = 주행저항() × 경사면저항() (6)
동력전달효율은 구동륜(타이어)까지 전달되는 실제 사용되는 힘으로 엔진토크, 클러치, 브레이크, 변속기와 연동된다.