< 기 술 논 문 >
CopyrightⒸ2012 KSAE / 116-05 pISSN 1225-6382 / eISSN 2234-0149 Transactions of KSAE, Vol. 20, No. 2, pp.30-37 (2012)
공압식 능동형 엔진마운트시스템의 최적 제어매개변수 식별
김 일 조1)․이 재 천*2)․최 재 용3)․김 정 훈4)
메카시스 메카트로닉스센터1)․계명대학교 기계자동차공학부2)․대흥 R&T 기술연구소3)․
현대・기아자동차 차량시스템 개발팀4)
Identification of Optimal Control Parameters for a Pneumatic Active Engine Mount System
Il-Jo Kim1)․Jae-Cheon Lee*2)․Jae-Yong Choi3)․Jeong-Hoon Kim4)
1)Mechatronics Center, Mechasys Co., Ltd., 404 Daegu Machinery Institute, Horim-dong, Dalseo-gu, Daegu 704-240, Korea
2)Department of Mechanical and Automotive Engineering, Keimyung University, Daegu 704-701, Korea
3)Technical Center, Daeheung Rubber & Technology Co., Ltd, 607 Jillye-myeon, Gimhae-si, Gyeongnam 621-884, Korea
4)Vehicle System Development Team, Hyundai-kia Motors Co., 772-1 Jangdeok-dong, Hwaseong-si, Gyeonggi 445-706, Korea (Received 30 November 2010 / Accepted 29 September 2011)
Abstract : Pneumatic Active Engine Mount(PAEM) with open-loop control system has been developed to reduce the transmission of the idle-shake vibration induced by engine effectively and economically. A solenoid valve installed between PAEM and vacuum tank is on-off switched by the Pulse Width Modulate(PWM) control signal to decrease the dynamic stiffness of the engine mount. This paper presents the methodology to identify the optimal values of control parameters of a PAEM, i.e, turn-on timing and duty ratio of PWM signal for 6 different idle driving conditions. A scanning algorithm was first applied to the vehicle test to obtain the approximate optimal control parameters minimizing the vibration at front seat rail and at steering wheel. Then the PAEM system identification was fulfilled to find accurate optimal control parameters by using multi-layer neural networks of Levenberg-Marquardt algorithm with vehicle test data.
Key words : PAEM(Pneumatic Active Engine Mount, 공압식 능동형 엔진마운트), Optimal control parameter(최적 제어매개변수), Turn-on timing(전원인가시점), Duty ratio(듀티율), Neural networks(신경망 회로)
1. 서 론1)
엔진마운트는 그 위에 엔진이 놓여져 차체와 연 결되는 기구로서, 엔진의 폭발행정에 의한 진동은 마운트(mount)로 전달되어 차량으로 퍼져나가기 때 문에 차량의 정숙성을 위해서 진동절연 성능이 매 우 중요하다.1) 엔진의 과도응답(excessive response) 방지를 위해서는 마운트의 강성이 높을수록 유리하 고, 차체로 전달되는 진동을 효과적으로 절연하기 위해서는 강성이 낮을수록 유리하다. 이러한 두 가
*Corresponding author, E-mail: [email protected]
지 조건을 모두 충족시키기 위해 엔진 회전각속도 신호를 이용한 능동형 엔진마운트가 연구되어왔 다.2-4) 이들은 마이크로폰(microphone)이나 가속도 센서(accelerometer)를 이용하여 소음과 진동을 감지 한 후, 로드센서(load sensor)에 의해 측정되는 엔진 의 진동을 구동기로 상쇄하는 방식의 능동형 엔진 마운트 연구를 진행하였다. 그러나 이와 같은 실시 간 피드백 제어방식의 능동형 엔진마운트는 고비용 과 신뢰성 부족으로 상용화되기 어려웠다. 이에, 최 근 들어 맵(map) 방식의 오픈루프 제어기를 적용한 저가의 능동형 엔진마운트가 해외 자동차 부품회사
공압식 능동형 엔진마운트시스템의 최적 제어매개변수 식별
에서 개발되어 적용되고 있으며,5-7) 국내에서는 아 직 어떠한 능동형 엔진마운트도 상용화 되지 못한 상태이다.
2007년부터 “부품소재기술개발사업”의 일환으 로, 공압식과 전자식 그리고 전동식 구동기를 사용 하는 능동형 엔진 마운트 시스템 개발이 국내 방진 고무 업체들을 주축으로 하여 진행 중에 있으며, 구 동기 특성에 따라 각기 다른 성능 목표를 가진다. 공 압식 능동 엔진 마운트는 아이들 NVH 개선을 위하 여 20~50Hz 범위의 진동 감쇠가 목표이며, 전자식 능동 엔진 마운트는 모터에 의해 유압엔진마운트 내 오리피스 유로 면적을 가변시키는 방식으로서 30~100Hz 범위의 진동 제어를 목표하고 있다. 전동 식 능동 엔진 마운트는 전동모터에 의해 역 위상의 가진력을 발생시켜 엔진 진동을 보상하는 방식으로 서 30~250Hz 범위의 차량주행 중 NVH 개선을 목표 로 한다.
본 논문에서는 공압식 솔레노이드 밸브를 이용한 피드포워드 방식의 공압식 능동형 엔진마운트 (PAEM: Pneumatic Active Engine Mount) 에 관한 연 구를 하였으며, Fig. 1은 대표적인 맵 방식 오픈루프 제어기인 PAEM의 구조를 보여준다. PAEM은 공회 전시 진동 저감을 목적으로 하며, 주 고무(main rubber), 상부액실(upper chamber), 진동실(oscillating chamber), 분리기(decoupler), 유로(orifice), 공기실 (air chamber), 하부액실(lower chamber)등으로 구성 된다. 주 고무는 엔진의 정적하중에 대한 기본적인 강성을 제공한다. 상부액실과 진동실, 하부액실은 2 개의 오리피스 유로에 의해 상호 연결되고 진동실 과 공기실은 분리기에 의해 나누어진다. 분리기는 작은 변위를 가지는 판(plate)으로서 진동실과 공기 실의 압력차에 의해 변형된다. 공기실은 출구에 설 치된 공압식 솔레노이드밸브(solenoid valve)에 의해 대기압 또는 진공압과 교차 연결됨으로써 마운트의 동강성을 저감시켜 엔진 진동을 감쇠한다. 솔레노 이드 밸브는 ECU의 펄스폭변조(PWM: Pulse Width Modulation)신호에 의해 on/off 구동되며, 진공압은 디 젤 차량의 진공펌프와 연결된 진공탱크를 이용한다.
본 연구는 PAEM 시스템의 PWM 제어신호의 최 적 제어매개변수(control parameter) 식별에 대한 것
Fig. 1 Pneumatic active engine mount
이다. PAEM 제어기는 맵 방식의 오픈루프 제어기 로서 운전조건 별 최적의 제어매개변수를 구해야 한다. 제어로직 개발을 위한 시스템 모델링에 있어, 엔진마운트를 거쳐 차체로 전달되는 진동전달 시스 템의 수학적 모델링은 고도의 비선형성과 시변(time variant)변수들로 인해 매우 어려우며 모델링 오차 가 크다. 이에 본 연구에서는 실차시험데이터를 바 탕으로 인공 신경망 회로(neural networks)를 이용한 실험적 시스템식별(experimental system identifica- tion)에 의해 PAEM 시스템의 모델을 구하고 여러 가지 차량운전조건에서의 최적 제어매개변수를 구 하는 방안을 제시코자 한다.
2. PAEM의 실차 시험 2.1 시험 개요
Fig. 2는 PAEM 시스템의 개략도이다. 본 연구에 서는 디젤 VGT(Variable Geometry Turbocharger) 차 량의 서브프레임과 엔진사이에 PAEM을 장착하여 공회전(idle) 상태에서 시험하였다. 가속도 센서들 은 프런트 시트레일(front seat rail)과 조향핸들 (steering wheel)에 각각 장착하였다. 변속기 기어의 위치와 에어컨 on/off의 여러 조건에서, 솔레노이드 밸브의 구동신호인 PWM 신호의 전원인가 시점 (turn-on timing of a period, %)과 듀티율(duty ratio,
%)을 변화시키며 가속도센서 출력을 LMS Test. Lab 으로 계측하였다.
운전조건은 에어컨 on/off와 변속기어의 중립(N), 전진(D), 후진(R)에 따른 6가지(Fig. 3 참조)로서, 에 어컨 구동전압과 변속시프트 위치센서의 출력 값이 ECU에서 입력된다. 운전조건별 최적의 제어매개변
Il-Jo Kim․Jae-Cheon Lee․Jae-Yong Choi․Jeong-Hoon Kim
Fig. 2 Pneumatic active engine mount system
Fig. 3 Idle driving conditions
Fig. 4 Various signals of PAEM system
수 즉, PWM 펄스신호의 전원인가시점과 듀티율을 추정하기위해 전원인가시점과 듀티율을 변화시키 면서 진동 가속도를 측정하는 스캔 알고리즘(scan algorithm)을 구성하여 ECU(Electronic Control Unit) 마이크로컨트롤러에 내장하였다. ECU의 PWM 출 력신호는 크랭크축 위치(CKP : Crank Shaft Position) 센서의 임펄스 신호를 ECU에서 외부 인터럽트 (interrupt)로 받아들여 펄스 신호를 실시간으로 생성 한다(Fig. 4 참조). CKP 임펄스 신호는 크랭크 축 6°
마다 발생하여 크랭크 축 1회전당, 차량의 연료분사 타이밍과 관련되어 빠진 2개 신호(missing tooth)를 제외하고, 총 58개 발생한다. PWM 신호에 의해 솔 레노이드밸브가 on/off 작동하면 엔진 마운트의 공 기실은 대기압 또는 진공압과 교차 연결되어 마운
트의 동강성을 낮춤으로써 엔진에서의 전달력을 감 쇠시키는 작용을 하게 된다.
2.2 시험데이터 변환
실차 시험에서 가속도 센서를 이용하여 획득한 시간계 데이터들을 Matlab을 이용하여 주파수계 파 워스펙트럼 밀도(PSD : Power Spectral Density)로 변 환하였으며, 수식은 식 (1)과 같다. 파워 스펙트럼 밀도는 정상 랜덤 신호(stationary random signal)에서 자기 스펙트럼 밀도(auto spectral density)와 같은 의 미로 사용되며 주파수에 대한 스펙트럼의 변화율을 나타낸다. 따라서 전주파수 대역에서의 적분은 시 간 영역 신호의 평균제곱 값에 해당한다.8)
lim
→∞
(1)
여기에서 는 자기 스펙트럼 밀도함수, E는 평균값, T는 시간, 는 시간영역 신호를 각각 의미한다. 그리고 각 실험조건에서의 결과를 상대 비교하기 위해 PSD 데이터의 실효값(RMS : Root Mean Square)을 계산하였다.
2.3 시험 결과
2.3.1 광역스캔 알고리즘
Fig. 3의 각 운전조건에서 최적 제어매개변수를 찾기 위해 광역스캔 알고리즘으로 시험하였다.
광역스캔 알고리즘은 전원인가시점을 진동 한 주 기의 0%~90%를 10등분으로 나누고, 듀티율을 20%~80%사이를 7등분하여, 총 70가지 경우(모 드)의 PWM 신호를 발생시키는 알고리즘이다 (Fig. 5 참조).
Fig. 6과 Fig. 7은 시험결과의 사례로서, 기어 D단, 에어컨 off 상태에서 광역스캔 알고리즘의 70가지 제어매개변수(전원인가시점과 듀티율) 모드별 프 런트 시트레일과 조향핸들의 가속도센서 출력의 PSD의 실효값을 각각 나타낸 것이다.
2.3.2 정밀스캔 알고리즘
본 연구는 기어 D단에서의 진동 절연이 주목적이 므로, 기어 D 단의 광역스캔 알고리즘 적용 시험결 과를 바탕으로 프런트 시트레일과 조향핸들 두 지
Identification of Optimal Control Parameters for a Pneumatic Active Engine Mount System
Fig. 5 Flowchart of wide scan algorithm
Fig. 6 Test results of wide scan of front seat rail (gear: D, air condition: on)
Fig. 7 Test results of wide scan of steering wheel (gear: D, air condition: on)
점 모두에서 PSD의 실효치가 다른 모드와 비교시값 이 상대적으로 낮은 49~61번 사이의 11개 제어매개 변수를 선정한 후 각 모드별 전원인가 시점과 듀티 율을 CKP 임펄스 주기(크랭크축 각도 6°) 단위로 세 분화하여 99개 제어매개변수 모드의 정밀 스캔 알
Fig. 8 Test results of narrow scan on front seat rail (gear: D, air condition: on)
Fig. 9 Test results of narrow scan on steering wheel (gear: D, air condition: on)
고리즘을 구성하여 시험하였다. 시험을 통하여 각 공회전 모드에서의 진동 저감율이 가장 좋은 최적 제어매개변수를 찾을 수 있었다. Fig. 8과 Fig. 9는 기 어 D, 에어컨 on 상태에서 프런트 시트레일과 조향 의 가속도센서 출력의 PSD의 실효값을 각각 도시한 것이다.
Fig. 8과 Fig. 9 그래프의 가장 오른쪽의 체크무 늬 막대는 솔레노이드 밸브를 작동시키지 않은 상 태에서의 시험결과이다. Fig. 8의 프런트 시트레일 의 경우 시험모드 17번(17.5 W/Hz)에서 솔레노이 드 밸브를 작동하지 않았을 때의 값(23.9 W/Hz)보 다 약 25%정도 진동저감 효과가 있으며, Fig. 9의 조향핸들의 경우 시험모드 67번(3424 W/Hz)에서 솔레노이드 밸브를 작동하지 않았을 때의 값(9335 W/Hz)보다 약 60%이상의 진동저감 효과가 있음을 보여준다.
Table 1과 Table 2는 이상의 시험을 통해 6가지 운 전조건에서 PAEM의 진동저감 효과가 가장 우수한 최적의 제어매개변수를 각각 요약한 결과이다.
김일조․이재천․최재용․김정훈
Table 1 Optimal control parameters of front seat rail obtained by scan test
AC (On, Off) Gear
Duty ratio (%)
Turn-on timing
(%)
RMS of PSD
RMS of PSD (Sol-valve off)
AC/On
D 70 66.7 17.5 23.9
N 76.7 60 7.4 12.7
R 80 60 12.6 18.8
AC/Off
D 70 53.3 12.2 21.3
N 66.7 53.3 5.8 9.2
R 63.3 53.3 9.9 16.8
Table 2 Optimal control parameters of steering wheel obtained by scan test
AC (On, Off) Gear
Duty ratio (%)
Turn-on timing
(%)
RMS of PSD
RMS of PSD (Sol-valve off)
AC/On
D 66.7 53.3 3424 9335
N 70 66.7 980 3368
R 66.7 53.3 2711 4168
AC/Off
D 70 66.7 1526 6846
N 76.7 73.3 1089 1986
R 70 66.7 1030 3498
3. PAEM 신경망회로의 최적 제어매개변수 상기한 바와 같이 실차시험을 통해 여러 가지 운 전조건에서 PAEM의 진동저감효과가 극대화되는 PWM 신호의 제어매개변수를 찾을 수 있었다. 그 러나 시험적으로 구한 최적 제어매개변수는 크랭 크축 각도 6° 단위의 CKP 임펄스 주기와 동기화되 어 전원인가시점과 듀티율을 정한 것으로서 CKP 임펄스와 임펄스 사이에 최적지점(optimal point)이 위치할 수도 있어 진정한 의미에서의 최적 값이라 할 수 없다.
이에 본 연구에서는 실차시험 데이터를 이용하여 다층신경망회로의 PAEM 시스템을 모델링하고 보 다 정밀한 최적 제어매개변수 값을 구하였다.
3.1 신경망회로 모델
3.1.1 신경망회로 구성
신경망 회로를 이용한 시스템 식별은 1980년대 이후 비선형 시스템의 모형화 및 재현에 만족할 만 한 성과를 거두었다.9-11) 본 연구에서는 PAEM 시스
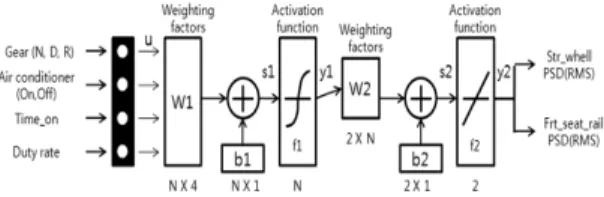
Fig. 10 Neural networks schematic
템 식별을 위해 다층 신경망회로의 지도학습법을 사용하였다. 학습 알고리즘으로는 배치(batch)학습 으로서 수렴속도가 빠르고 안정성이 높은 Leven- berg-Marquardt 알고리즘을 적용하였다.12)
PAEM 신경망회로 모델의 입력 데이터는 2장의 실차시험에서 설명한 변속기어 위치, 에어컨 on/off, 솔레노이드 밸브의 PWM신호의 전원인가시점과 듀티율의 4가지이다. 지도학습을 위한 목표(target) 값은 각 시험모드별 획득한 조향핸들과 프런트시트 레일의 가속도센서 출력의 PSD의 실효값이다.
PAEM 신경망회로 모델은, Fig. 10에서 보듯이, 4 개의 입력을 가진 하나의 입력층과 다수(N개)의 노 드를 가진 하나의 은닉층 그리고 2개의 출력을 가진 출력층으로 구성되는 4-N-2 네트워크 구조이며, 수 식으로는 식 (2)~식 (5)와 같이 표현된다.
⋅ (2)
⋅ (3)
⋅ (4)
⋅⋅ (5) 여기서, u는 입력벡터이며, W1, W2는 각각 입력 층과 은닉 층의 가중치 벡터이다. 그리고 y1은 은닉 층의 출력벡터, y2는 조향핸들과 프런트 시트레일에서 측 정된 센서 데이터의 PDS 실효값을 포함하는 출력벡 터를 나타낸다. b1, b2는 각각 입력 층과 은닉 층의 바 이어스벡터(bias vector)이다.12) 은닉 층의 활성화 함 수로는 하이퍼볼릭 탄젠트 시그모이드(hyperbolic tangent sigmoid) 함수를, 출력 층의 활성화 함수로는 선형함수를 사용하였다. 은닉 층 뉴런의 수는 평균 제곱오차(MSE : Mean Squared Error)와 소요시간을 고려하여 선택하였다.
평균제곱오차는 모델 적합도를 보여주기 위한 것
공압식 능동형 엔진마운트시스템의 최적 제어매개변수 식별
으로 식 (6)과 같이 정의된다.
exp
(6)
여기서 n은 데이터의 수이며, exp는 실험 데이터,
는 예측 데이터이다. MSE는 0에 가까울수록 모 델의 적합도는 증가한다.
3.1.2 신경망회로 학습
신경망회로의 시뮬레이션은 Matlab 신경망회로 툴박스(toolbox)를 이용하였다(Fig. 11 참조).
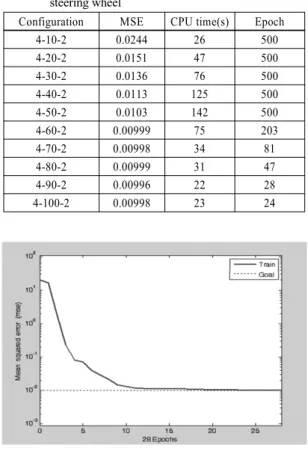
Table 3은 은닉 층의 뉴런의 수를 10개부터 100개 까지 10개씩 증가시키며 신경망 모델을 구성하여 시뮬레이션 하였을 때 조향핸들의 신경망 출력데이 터의 성능지표 분석을 나타낸 것이다. 최대 학습 횟 수(epoch)는 500, 목표오차는 0.01이었다. Table 3에 서 은닉 층의 뉴런의 수가 60개까지 증가할수록 MSE가 감소하는 것을 볼 수 있다. 그리고 은닉 층의 뉴런의 수가 60개 이상에서는 학습소요시간(CPU time)이 감소하였다. 이는 최대 학습 횟수 이전에 MSE의 목표오차에 도달하였기 때문이다. 그리고 은닉층의 뉴런의 수가 100개일 경우의 학습 소요시 간이 뉴런수가 90개일 경우보다 늘어난 것은 학습 횟수는 감소하였으나 회당 학습시간이 증가하였기 때문이다. 이에 본 연구에서는 4-90-2 신경망 네트 워크를 사용하였다. Fig. 12는 4-90-2 신경망회로의 학습 횟수에 따른 MSE를 보여주며, Fig. 12에서 보 듯이 Levenberg- Marquardt 알고리즘의 신경망회로 학습을 통해 PAEM 시스템 모델링이 신속히 이루어 짐을 알 수 있다.
Fig. 11 Neural network schematic of Matlab
Table 3 The result of various network configurations of steering wheel
Configuration MSE CPU time(s) Epoch
4-10-2 0.0244 26 500
4-20-2 0.0151 47 500
4-30-2 0.0136 76 500
4-40-2 0.0113 125 500
4-50-2 0.0103 142 500
4-60-2 0.00999 75 203
4-70-2 0.00998 34 81
4-80-2 0.00999 31 47
4-90-2 0.00996 22 28
4-100-2 0.00998 23 24
Fig. 12 Performance error on 4-90-2 network
3.2 PAEM 신경망회로모델을 이용한 최적 제어매개변수 식별
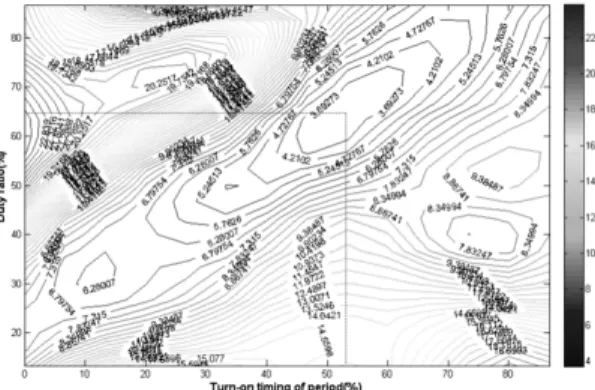
상기한 바와 같이 크랭크축 각도 6° 단위의 CKP 임펄스 주기를 기반으로 한 실험 데이터를 바탕으 로 PAEM시스템의 성능을 신경망회로로 학습하였 다. Fig. 13는 기어 N, 에어컨 off 상태에서의 프런트 시트레일에서의 시험데이터를 등고선(contour)그래 프로 나타낸 것으로서, PWM 전원인가시점과 듀티 율 대비 PSD 실효값을 표시한 것이다. Fig. 13에서 최적점은, Table 1에도 나타낸바와 같이, 전원인가 시점 53.3%, 듀티율 66.7%에 위치한다. 그리고 Fig.
14는 전원인가시점과 듀티율 각각의 입력 데이터 간격을 크랭크축 각도 1.5° 간격으로 정밀스캔 알고 리즘보다 4배 세분화 하여, 기 학습된 신경망회로에 입력하여 구한 시뮬레이션 결과 그래프이다. Fig. 14 에서 최적점은 전원인가시점 52.5%, 듀티율 65.9%
에 위치하였다.
Il-Jo Kim․Jae-Cheon Lee․Jae-Yong Choi․Jeong-Hoon Kim
Fig. 13 The countor graph of test results of front seat rail at gear-N and AC-off
Fig. 14 The countor graph of neural network simulation results of front seat rail at gear-N and AC-off
Table 4 The optimal control parameters of front seat rail via neural network
AC
(On, Off) Gear
Duty ratio (%)
Turn-on timing
(%)
RMS of PSD
AC/On
D 70.8 65.8 16.9
N 75.8 60.8 7.0
R 80.8 58.2 12.1
AC/Off
D 71.7 54.2 11.7
N 65.9 52.5 5.3
R 64.1 54.1 8.7
기어 N, 에어컨 off 상태에서의 조향핸들의 경우, 프런트 시트레일의 경우와 유사하게 Fig. 15, Fig. 16 의 결과를 얻을 수 있었다. Fig.15는 시험데이터 바 탕의 그래프이며, Fig. 16는 세분화한 입력데이터에 의한 PAEM 신경망회로 모델의 시뮬레이션 결과 그 래프이다. 스캔시험 데이터에 의한 Fig. 15의 최적점 은 전원인가시점 73.3%, 듀티율 76.7%이며, 신경망
Fig. 15 The countor graph of test results of steering wheel at gear-N and AC-off
Fig. 16 The countor graph of neural network simulation results of steering wheel at gear-N and AC-off
Table 5 The optimal control parameters of steering wheel via neural network
AC
(On, Off) Gear
Duty ratio (%)
Turn-on timing
(%)
RMS of PSD
AC/On
D 65.8 52.5 3024
N 69.2 66.7 939
R 68.4 54.1 2680
AC/Off
D 71.7 66.7 1501
N 75.8 74.2 1029
R 70.8 67.5 987
회로에 의한 Fig. 16의 최적점은 전원인가시점 74.2%, 듀티율 75.8%이었다.
Table 4와 Table 5는 6가지 운전조건에서 프런트 시트레일과 조향핸들에 대해 각각 학습된 PAEM 신 경망회로 시뮬레이션으로 구한 최적 제어매개변수 값을 정리한 표이다. 프런트 시트레일의 경우인 Table 1과 Table 4, 그리고 조향핸들의 경우인 Table 2
Identification of Optimal Control Parameters for a Pneumatic Active Engine Mount System
와 Table 5를 서로 비교해 보면, Table 1, Table 2의 스 캔시험 결과에 비해 Table 4, Table 5의 신경망회로 의 PSD 실효값이 6.7~9.9% 감소한 것을 알 수 있다.
이는 본 연구에서 제시한 신경망회로를 이용한 실 험적 시스템식별 기법에 의해 PAEM의 진동저감 효 과를 극대화할 수 있는 최적의 제어매개변수를 구 할 수 있음을 입증한다.
4. 결 론
본 논문에서는 공회전시 진동(idle shake) 저감을 주목적으로 하는, PAEM 시스템의 오픈루프 제어매 개변수인 공압 솔레노이드밸브 PWM 신호의 듀티 율과 전원인가시점의 최적값을 인공 신경망회로의 시뮬레이션을 통해 식별하는 법을 다루었다. 연구 결과는 다음과 같이 정리된다.
1) PAEM 시스템의 신경망회로 학습을 위해 우선 디젤 VGT 차량을 대상으로 PAEM 시스템과 가 속도계를 장착하고 공회전 상태에서 시험하였 다. 정밀스캔 시험은 CKP 신호와 동기화하여 솔 레노이드 구동 PWM 신호의 전원인가시점과 듀 티율을 변동시키는 시험으로서, 시험 결과 프런 트 시트레일과 조향핸들의 진동이 솔레노이드 밸브를 작동하지 않았을 때보다 각각 최대 25%, 60% 저감되는 효과가 있었다.
2) Levenberg-Marquardt 알고리즘에 의한 PAEM시 스템의 신경망 모델은 학습 횟수와 소요시간을 고려할 때 은닉 층의 뉴런의 수가 90개인 4-90-2 구조의 신경망 모델이 적합하였다.
3) 전원인가시점과 듀티율을 세분화하여, 기 학습 된 신경망회로에 입력하여 시뮬레이션 한 결과 정밀스캔의 시험결과보다 PSD 실효값이 6.7~9.9%
줄어든 최적 제어매개변수를 찾을 수 있었다.
후 기
본 연구는 지식경제부 부품소재 기술개발사업,
“능동형 엔진 마운팅 시스템개발” 과제의 일환으로 수행되었습니다. 또한 이 연구는 지식경제부·한국 산업기술평가원 지정 계명대학교 전자화 자동차부 품지역혁신센터의 지원에 의한 것입니다. 지원기관 에 감사드립니다.
References
1) M. S. Kim, H. S. Kim and D. H. Choi, “An Optimal Design of the Front Wheel Drive Engine Mount System,” Transactions of KSAE, Vol.1, No.3, pp.74-82, 1993.
2) C. R. Fuller, E. Nelson and P. R. Nelson, Active Control of Vibration, Academic Press, San Diego, pp.163-189, 1997.
3) H. Ozaki, T. Tsukamoto, A. Ichikawa, H.
Yamazoe, A. Shibata, T. Maeno and H. Tajima,
“Development of Active Engine Mount,” JSAE Annual Congress, pp.141-114, 1999.
4) H. Matsuoka, T. Mikasa and H. Nemoto, “NV Countermeasure Technology for a Cylinder-on- demand Engine Development of Active Control Engine Mount,” SAE 2004-01-0413, 2004.
5) A. Shibara, H. Yamazoe, Y. Hayashi and K.
Honda, Electronically Controlled Engine Mount, US00612012A, United States Patent, Verginia, 2000.
6) K.-K. Shin, D. J. Verbrugge and R. W. Leschuk, Method and Apparatus for Controlling an Active Engine Mount, US20070029713A1, United States Patent, Verginia, 2007.
7) H. G. Park, Engine Mount Control Methodology and Embedded Cluster of Control Logic, 10-2009-0041983, Korean Intellectual Property Office, 2009.
8) A. Papoulis, Probability, Random Variables, and Stochastic Processes, 2nd Edn., McGraw- Hill Book Co., London, pp.265-271, 1984.
9) K. Dhong, “Nonlinear System Identification:
Comparison of the Traditional and the Neural Network Approaches,” Journal of Korea Soci- ety of Precision Engineering, Vol.12, No.5, pp.157-165, 1995.
10) H. Y. Kim, Y. K. Park, J. K. Lee, D. R. Lee and G. D. Kim, “A Model Reference Variable Struc- ture Control Based on a Neural Network System Identification for an Active Four Wheel Stee- ring System,” Transaction of KSAE, Vol.8, No.6, pp.142-155, 2000.
11) R. Isermann, Mechatronic Systems, Springer- Verlog London LTD., London, pp.308-323, 2003.
12) J. A. Freeman and D. M. Shapura, Neural Net- works Algorithms, Applications and Programming Techniques, Addison-Wesley, New York, 1991.