- 기호설명 - α :
δ : β : λ : θ : θ1 : θ2 : θ3 : r :
Pn : (Xn ,Yn)
P0 : ( )
P1 : P2 : P3 :
P4 : P5 :
: P2 P1
:
1. 서 론
.
.
. 학술논문
< > DOI:10.3795/KSME-A.2010.34.8.953 ISSN 1226-4873
다 개체 로봇의 협업기법에 관한 연구
최준용* ․ 김동환 ․ 이귀형**
서울산업대학교 산업대학원 메카트로닉스공학과 서울산업대학교 기계설계 자동화공학부
* , ** ·
A Collaboration Method to Confine a Robot with Multiple Robots
Jun-Yong Choi*, Dong Hwan Kim and Gui Hyung Lee**
* Dept. of Mechatronics, Seoul Nat'l Univ. of Technology
** School of Mechanical Design and Automation Engineering, Seoul Nat'l Univ. of Technology (Received July 8, 2008 ; Revised June 5, 2010 ; Accepted June 16, 2010)
Key Words: Multiple Robots(다개체 로봇), Collaborative Control(협업제어), Robot Confinement(로봇 포획), 협업 조정자
Collaboration Manager( )
초록 이 연구에서는 다 개체 로봇에 의해 하나의 로봇을 자율적으로 포획하는 협업제어에 관한 연구를: 제안한다 제안된 방안은 각 로봇에 대한 작업역할을 지정하는 역할 분류기 단일 로봇의 행동 선택기. , 그리고 복잡한 상황을 대처하는 협업관리기로 구성되어 있다 이 연구에서는 주변의 다개체 로봇의 다. 양한 행동을 통하여 단위 로봇을 특정지역으로 몰아가는 결과를 시뮬레이션을 통하여 그 적절성을 검 증하였다.
Abstract: In this study, we proposed duty executions to confine a robot in a specific place with multiple robots. The proposed method involved the use of a role classifier for assigning labor roles, behavior selector for each robot, and a collaboration manager for handling complex situations. Further, we verified the validity of the proposed method by performing simulations to confine a robot in the specific location by using multiple robots.
Corresponding Author, [email protected]
2010 The Korean Society of Mechanical Engineers
Ⓒ
(1)
.(2)
.
.
. .
GPS
.
.
. Millibot(1)
.
Lee
.(3)
. Wang
.(4) Lien
.(5)
.
. .
.
. Liu .(6)
.(7)
.
.
.(8,9)
, .
( , , , )
.
.
(sensing) .
, .
.
.
2. 다 개체 로봇의 협업 시스템
2.1 다 개체 로봇 시스템 구조
Table 1
(homogeneous robot)
,
, .
,
.
( )
( ) .
다 개체 시스템
적용된
시스템 비 고
개체의
다양성 동종 개체
개체간의
통신량 없음 중앙컴퓨터와
통신 복잡성 문제 다 개체 로봇 4 개체
약자/
강자 문제
사냥감로봇/
사냥로봇 활동 영역
문제
사용시간
제한 건전지 사용
Table 1 Homogeneous non-communicating multi-robot systems
1 4 ,
1 .
. 협업 제어 구조 2.2
. ( )
.
, .
( , ,
, ) .
.
(7)
.
3. 협업 공동사냥 방법( )
3.1 사냥감 로봇의 행동유형
( )
.
( )β .
Fig. 1 The habit of bag robot
.
.
. Fig. 1
β P3 P4
.
. 유도 장소
3.2
.
Fig. 2(a) r
4 .
( )
δ 76° .
δ (1)
사냥 영역 3.3
.
유도장소 유도 허용각도
(a) (b)
Fig. 2 The guidance zone
Fig. 3 The hunting zone
.
.
. Fig. 3 .
사냥 로봇의 행동유형 3.4
8 .
3.4.1 관찰
( )λ
. P3
(Fig. 4)
.
Fig. 4 Observation
θ3 : θ4 :
θ1 - 0.5λ θ3 ± θ4 θ1 + 0.5λ
.
θ1 - 0.5λ > θ3 - θ4
(θ2)
θ2= θ3 + (0.5λ - θ4) (2) θ1 + 0.5λ < θ3 + θ4
(θ2) θ2 = θ3 - (θ4 - 0.5 )λ (3)
θ2 - θ1 .
3.4.2 차단
( )
. P3 (Fig. 5)
offset(2r) P5 .
α
×sin (4)
3.4.3 방면
P4( ) P5[ (5)]
(Fig. 6). P4
P5[ (6)] . P0: , :
(5)
(6)
3.4.4 파수
P3
P4( ) P5[ (7)]
. P4
P5[ (8)] .(Fig. 7)
(7)
(8)
3.4.5 진압
P4( ) P5[
(9)] .
.(Fig. 8)
(9)
3.4.6 회피
.
.(Fig. 9) θ:
(10)
θ
×sin (11) 3.4.7 복귀
. 3.4.8 추적
. P3
offset(2r) P5
( ) P5[ (12)] .
.(Fig. 10) α
×sin (12)
Fig. 5 Interception
Fig. 6 Release
Fig. 7 Sentinel
Fig. 8 Suppression
Fig. 9 Avoidance
Fig. 10 Pursuit
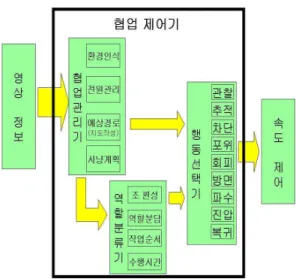
협업 제어기 4.
다 개체 로봇이 협업 공동사냥 을 수행하기 위( ) 해서는 각 로봇들의 위치에 따른 역할 분담과 상 황 변환에 따른 역할 전환이 필요로 하게 된다.
은 협업을 수행하기 위한 제어기의 구조를 Fig. 11
보여 주고 있다 협업 제어기는 협업관리기와 역. 할분류기 행동선택기로 구성되어 진다, .
환경 인식 4.1
영상정보가 입력되면 환경인식 모듈에서는 영 상처리를 통하여 벽 유도장소 사냥감 사냥로봇, , ,
Fig. 11 Block diagram of cooperative control
Fig. 12 Environment recognition
을 추출하게 된다 추출된 정보는 식. (13)과 같이 개의 픽셀데이터의 거리 값과 감지된 물체의 640
특징 값으로 반환하게 된다 로봇중심에서의 상. 대 각도는 화각(60°) 대 전체픽셀(640pixel)비로 1 픽셀은 0.0975°로 환산한다 즉. n 이 99인 데이터 는 로봇 중심에서 좌로 20.25°에 위치한다.
로봇번호
번째픽셀의물체와의거리값 번째픽셀의물체특징값
벽 유도장소 복귀장소
사냥감 사냥로봇
(13) 는 식 의 결과 값으로 각 픽셀의 정 Fig. 12 (13)
보를 나타낸 것으로 Dist(n)는 거리값을 Obj(n)는 특징값을 의미한다.
4.2 예상 경로 및 지도 작성
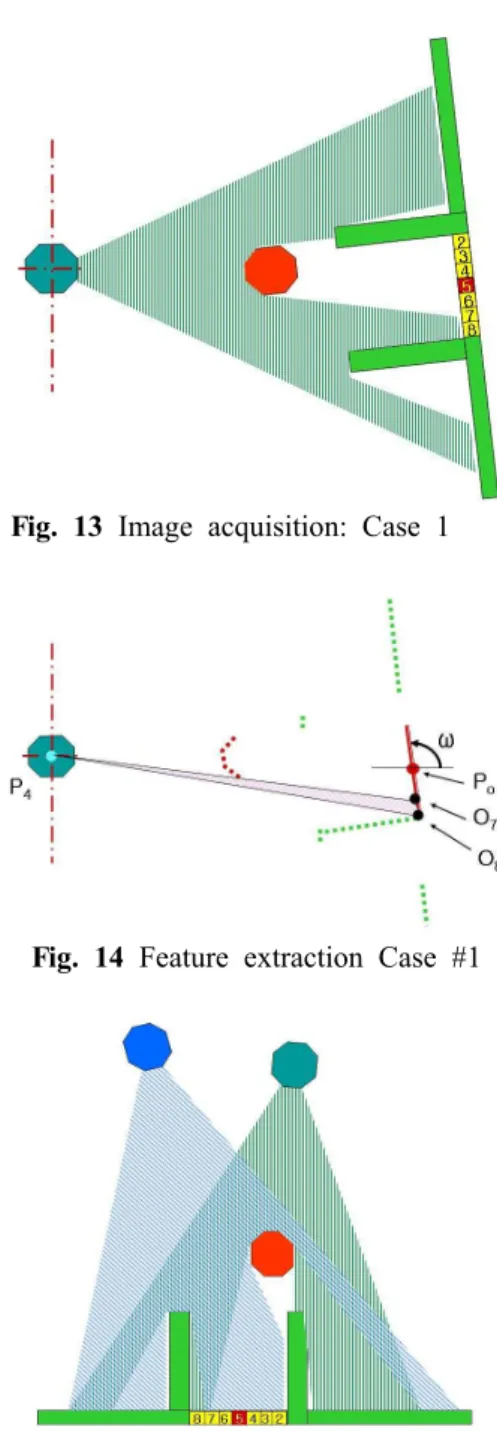
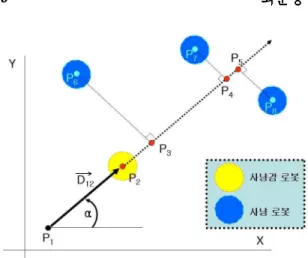
지역정보에 의존하는 경우 상대적인 물체정보를 이용하여 환경 및 상황을 판단하여야 하기 때문에 개체들이 특정 영역을 바라보게 되면 사냥 계획을 하거나 사냥감을 찾지 못해 경로계획을 세우기 어 렵게 된다 이를 방지하기 위해 사냥 지도 작성에. 필요한 최소한의 위치정보 사냥감 유도장소 를 수( , ) 집 해야만 한다 한. 대의 사냥로봇이 위치 정보를 획득하지 못할 시 역할 분류기를 거치지 않고 행동 선택기로 관찰 임무를 수행하게 한다 정보 획득 시. 위치 정보를 바탕으로 사냥감의 예상 경로를 생성 한다 예상 경로는 연속적인 영상에서 얻어진 사냥. 감의 중심좌표를 통하여 생성할 수 있다 첫 번째. 영상에서 얻은 P1과 두 번째 영상에서 얻은, P2를 알고 있고 예상 위치를, P3라고 한다면 식, (17)과 같이 P3를 구할 수 있다 각 점들을. ,
, 로 표현하면 벡터 성분은 식 (14)와 같다.
(14) 벡터의 크기와 방향각은 식 (15), 식 (16)과 같다.
(15)
tan
(16) ×cos
×sin (17) 다음으로 예상경로의 정보를 이용하여 사냥지 도를 작성하게 된다 사냥로봇과 유도 장소 사냥. , 감의 위치를 절대 좌표계로 표현한 것으로 한 대 의 사냥로봇이 사냥을 할 때에는 예상 경로 생성 후 바로 사냥 계획을 세울 수 있지만 2대 이상의 사냥로봇의 경우 상대적인 위치정보만으로는 첫 번째 사냥로봇 관점에서는 두 번째 사냥로봇이 단지 장애물로 인식되어지거나 명령을 받아들이 는 또 다른 사냥감로봇이 된다 절대적인 사냥. 지도의 작성을 위해서 본 논문에서는 지역적인 센싱 정보들을 통하여 사냥 지도 작성을 하였다.
이 후 지역적 영상 통합을 수행한다 여기서 지. 역적 영상정보 통합은 지역 좌표계들을 전역 좌 표계로 변환하여 하나의 절대 위치를 표현하는 것을 말한다 첫 번째 로봇의 특징 점들은 식. 에서 얻을 수 있었다 사냥 지도의 원점으로
(12) .
유도장소의 중심점(P0)으로 정하고 각 로봇의 상 대 영상 정보를 2차원 회전변환 및 이동변환을
Fig. 13 Image acquisition: Case 1
Fig. 14 Feature extraction Case #1
Fig. 15 Hunting Map building 통하여 절대 사냥 지도를 만든다.
두 대 이상의 사냥 로봇의 영상 정보를 통합하 기 위해서는 2개 이상의 유도장소 특징값 유도( 장소의 벽면: Obj = 2~8)을 가지고 있어야 한다. 은 지역적 센싱에 의한 영상정보를 보여주 Fig 13
고 있다. Fig. 14는 환경인식 과정을 거쳐 특징 값을 점으로 표현한 것이며 유도장소 특징 값 7 과 8을 획득한 것을 볼 수 있는데 이를 이용하여 회전된 ω의 값을 산출할 수 있다 이와 동일한. 방법으로 두 대의 사냥 로봇은 원점 P0를 중심으 로 -ω 만큼 회전하게 되면 전역 좌표계의 변환에
Fig. 16 The interception sequence
의한 사냥 지도 작성이 완료되어 진다(Fig. 15).
전원 관리 4.3
다 개체 로봇 시스템에서 활동 영역 문제에서로봇 의 사용시간 제한을 둠으로써 보다 효율적인 협업 기법의 산술적 비교가 가능해 진다 본 논문에서는. 기동토크에 따른 전류소모량은 고려하지 않고 단지 정지 상태(200mA)와 이동상태(500mA) 두 가지 경우 에 전류소모량을 계산한다 최소 허용 전류잔량. (Imin) 은 최대 분 동안 이동 가능한1 30000으로 가정한다.
사냥 계획 4.4
과 같이 사냥감 로봇이 진행 선상에 차 Fig. 16
단이 필요한 경우에 사냥감을 차단하기 위해서는 사냥감 보다 먼저 차단 위치에 사냥 로봇이 위치 를 해야 한다 즉 다음과 같은 조건이 성립된다. .
(D23 - D36) < 0 , (D24 - D47) > 0 , (D25 - D58) > 0
결과 값이 중에서 와 은 조건을 만족한다.
다음 조건은 최단 시간에 차단이 가능한 로봇을 결정해야 한다 사냥감 로봇의 현 위치에서 차단. 위치까지의 거리를 통하여 비교하면 가 더 짧 은 것을 알 수 있다 최초 차단 임무는. 에 주 어지고 다음 차단 위치와 차단 로봇은 이를 반복 하여 결정된다.
조 편성 및 역할 분담 4.5
사냥계획에서 모든 조건을 만족하여 차단 횟수에 대한 차단 위치와 차단 순서가 결정 되면 Table 2에 따라 차단 순번에 따라 역할을 분담하게 된다.
1 2 3 4 5
0 1 1
1
1 1
2 1
2
2
2 1 1
2 2
3
1 1
2 2
3
3 3
1 1
2 2
3 3
4
1 1
2 2
3 3
4
4 4
1 1
2 2
3 3
4 4
작업순서 및 수행시간 4.6
역할 분담이 이루어지면 2개 이상의 임무를 갖 게 되는데 협업을 위해서는 작업 순서가 바뀌게 되면 목표를 이룰 수 없게 된다 작업 순서에 따. 라서 각 로봇의 주어진 임무가 다르거나 같을 수 있다 작업순서에 따라 동기화가 필요한 경우가. 발생한다 이를 위해 각 작업 마다 작업 수행 시. 간을 행동 선택기에 전달하여 진행 시간을 확인 하도록 하였다 수행 시간은 각 임무를 수행하기. 위한 최종 위치를 현재의 위치와의 거리를 통하 여 시간으로 환산한다.
4.7 행동 선택기
행동선택기는 역할분류기에서 결정되어진 데이 터 개인 임무 작업순서 수행시간 를 통하여 행동( , , ) 을 선택하게 되며 행동에 따른 상대적 위치를, 산출하여 각 로봇의 속도 명령을 전달한다 차단. 횟수 1회에 사냥에 투입되는 로봇의 수가 한 대 일 때의 개인 임무는 차단 파수 진압의 작업순, , 서로 결정되어 진다 최초 첫 번째 작업 차단 이. ( ) 수행을 시작하면 차단 행동을 하기 위해 차단 위 치로 이동하게 되는데 수행시간은 차단 위치로
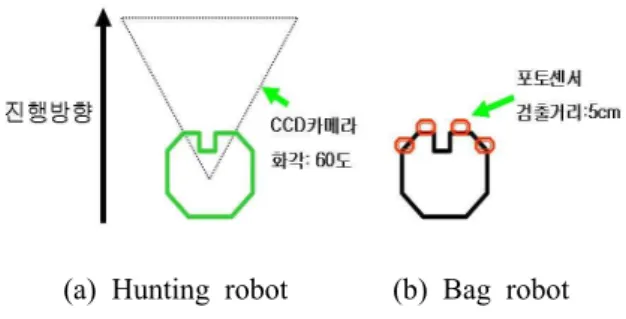
(a) Hunting robot (b) Bag robot Fig. 17 Sensor systems in simulation environment 이동거리로 환산된다 총. 3가지 행동을 수행하는 걸리는 총 작업 수행시간은 차단위치까지 이동시 간과 사냥감이 차단되기까지의 시간 파수위치까, 지 이동시간 그리고 진압시간 모두를 포함한다.
시뮬레이션 환경 및 결과 5.
시뮬레이션 환경 5.1
앞에서 설명한 다 개체 로봇의 협업기법을 검 증을 위해서 Microsoft Visual C++ 6.0 환경에서 시뮬레이터를 제작 하였다.
시뮬레이션 환경 내의 사냥 로봇[Fig. 17(a)]은 두 개의 DC모터와 연계된 무한궤도로 구성되어 있다 로봇의 전체 크기는. 17cm×17cm 의 크기 이며 양 바퀴간의 폭은, 15cm, 속도는 50cm/s로 하였다 센서로는 한 대의. CCD카메라와 레이저 변위 센서를 탐재하고 있다 카메라를 사냥로봇. 의 전방에 설치하고 로봇의 회전에 의해 좌우 방 향의 장애물을 감지하도록 한다 카메라 화각은.
컬러 센서로 해상도는 이다 레
60°, CCD 640×480 .
이저 변위 센서는 측정거리 3m, 분해능 1cm이며 전방에 설치하고 로봇의 회전에 의해 좌우 방향, 의 장애물을 카메라를 통하여 장애물에 대한 영 상처리를 통하여 물체에 대한 정보를 구한다 레. 이저 센서의 센싱 범위는 카메라의 가로 영상 범 위와 일치 시켰다 영상처리와 레이저 데이터 획. 득 시간은 33ms로 정하였다.
사냥감 로봇[Fig. 17(b)]은 두 개의 DC모터와 연계된 무한궤도로 구성되어 있어 전진 후진 좌, , 우방향으로 제자리 회전 및 좌회전 우회전이 가, 능하다 단 이번 실험에서는 전진과 제자리 우회. , 전으로 동작을 제한하였다. 장애물을 만날 시 우 수법을 적용하나 우수법을 적용하기 어려운 코너 부분에서는 좌수법으로 회전이 필요할 경우를 대 비하여 좌우 회전이 가능하도록 로봇의 설계를
( ) ( ) (%)
1 326 2010 4.5 11.5
2 675 528 9.4 3.3
3 471 1501 6.5 8.7
4 997 1823 13.8 10.5
5 478 492 6.6 3.1
6 69 483 1.0 3.1
7 473 724 6.6 4.4
8 475 884 6.6 5.3
9 387 1302 5.4 7.6
10 863 494 12.0 3.1
5214 10241 72.4 57.3
Table 3 Simulation result for hunting task I
제안하였다. 좌우 바퀴의 속도에 의해서 동작이 결 정되어 진다 센서는 총 개의 적외선 센서가 사용. 4 되며 장애물을 감지한다 검출거리는. 5cm, 센싱각 은 20°로 벽과 로봇을 구분을 하지 못한다 센싱이. 되면 시계방향으로 만큼 제자리 회전을 한다 로봇β . 활동 영역은 언덕이 없는 평지이며 영역의 전체 크 기는 250cm×200cm 정도의 크기이다.
시뮬레이션 결과 5.2
시뮬레이션의 목적은 앞에서 설명한 협업 기법 을 시뮬레이터에 적용하여 협업 관리기 역할 분, 류기 행동 선택기의 성능을 확인해보고자 함이, 다. 일반적인 먹이 추적 문제(The prey pursuit 에서 성능 평가 기준은 가지를 사용한
problem) 3
다.(7)
먹이 포획 성공률
1) = 완전포획횟수
포획시도횟수
포획 시간 얼마나 빠르게 먹이를 포획 하
2) :
였는가?
먹이 포획 과정에서의 충돌 횟수 3)
종전의 포획 성공률은 포획형태에 따라 분류가 되는데 본 연구에서는 유도 장소에 유도했는지 여부를 가지고 판단하기 때문에 성공률은 100%
이므로 평가 대상에서 제외한다 세 번째 항목의. 충돌문제는 지역적 영상정보를 통하여 물체에 대
만을 사용하여 성능평가 지표로 삼는다.
행동 선택기 적용에 대한 시뮬레이션 5.2.1
행동 선택기에는 총 9가지 행동의 형태를 가지 고 있다 행동 선택기만의 독립적인 성능평가는. 힘들지만 개체 수를 하나로 하면 기본적인 개별 행동에 대한 성능을 평가할 수 있다 산술적인. 성능 평가 요소로는 사냥 성공률 유도 시간과, 전류 소모량을 이용하였다 시뮬레이션. (Hunting task I 결과는) Table 3에 나타내었다 비교대상은. 유도 장소에서 관찰을 하다가 유도장소로 사냥감 이 들어 왔을 때 파수 및 진압을 통하는 방법을 사용하였다 행동 선택기를 적용 하였을 때는 유. 도 시간이 짧아진 결과를 볼 수 있으나 상대적으 로 전류 소모량이 많았다 이는 유도시간이 짧은. 데도 전류 소모량이 많은 것은 사냥이 시작되어 지면 사냥감의 예상 경로를 생성하기 위한 연속 적인 관찰 행동에서 오는 전류소모 때문이다 그. 래서 유도 시간에 비례하여 전류 소모량이 증가 되는 것을 볼 수가 있다 유도 시간은. 400초대로 일정한 값을 보이며 6회에 나타나는 짧은 시간은 무작위 초기 위치 선택으로 차단 없이 파수와 진 압을 하여 시간을 단축 하였으며 4,10회에 두 배 정도 긴 유도 시간은 각각 차단 실패 파수 실패, 를 보였기 때문이다.
협업 기법 적용에 대한 시뮬레이션 5.2.2
협업기법을 구현하기 위한 협업 제어기를 앞에서 설명하였다 이 협업 제어기의 성능을 평가하기위해. 서 대의 사냥로봇을 사용하여 대의 사냥로봇이라4 1 도 사냥이 가능 할 때까지 유도 횟수와 유도 시간 을 통하여 협업 제어기를 검증 하였다(Table 4). 협 업기법 적용을 한 시뮬레이션(Hunting task II)을 통해 평균 유도시간은 131초 유도 횟수는 약, 13 회의 결과를 얻을 수 있었다 평균 유도 시간이. 일정하지 못한 이유는 사냥감 로봇의 위치와 방 향에 따라 차단횟수가 결정되면 조 편성에 의해 사냥에 투입되는 로봇의 수에 변화가 생기기 때 문이다 이외에도 최소 허용 전류에 의해 복귀한. 로봇의 수의 변화도 영향을 주었다 유도횟수 변. 동률은 24.6%를 나타내었다 시뮬레이션. (Hunting 과정에서 사냥 로봇들이 특정 지역으로 task II)
이동하는 현상을 보였다 이는 모든 사냥로봇이.
( )
1 95 18
2 132 13
3 144 10
4 89 17
5 103 16
6 145 11
7 187 9
8 165 10
9 174 9
10 184 7
11 131 13
12 116 15
13 102 17
14 87 15
15 121 14
16 111 15
17 100 17
18 133 11
19 128 13
20 183 9
131 12.95
1 109 16 1.1
2 99 17 2.1
3 144 12 -2.9
4 89 19 4.1
5 103 16 1.1
6 145 11 -3.9
7 137 12 -2.9
8 129 13 -1.9
9 128 14 -0.9
10 85 19 4.1
116.80 14.90
2.77 Table 5 Simulation result for hunting task Ⅲ
사냥감과 유도 장소의 위치정보를 획득하기 위하 여 이동하게 된 것이다 이런 현상을 막기 위해. 서 최초 예상 경로를 생성하는 사냥 로봇이 발생 하면 나머지 사냥 로봇은 유도 장소만을 찾는 관 찰 행동을 하도록 우선순위를 적용(Hunting task 하여 활동 영역을 넓혔다 와 같이 차
III) . Table 5
단 횟수가 늘어나는 현상을 보였다 차단 횟수의. 증가는 많은 수의 로봇이 공동사냥에 투입 된 것
을 말해주며 평균 유도 시간은, 14초 단축 되었 으며 유도 횟수는, 2회 증가하였다 평균 유도 시. 간(131초->116.8초 을) 12% 감소시켰으며 유도 횟 수(12.95회->14.9회 를) 15% 증가되는 효과를 보였 다 유도횟수 변동률은 종전의. 24.6%에서 18.5%
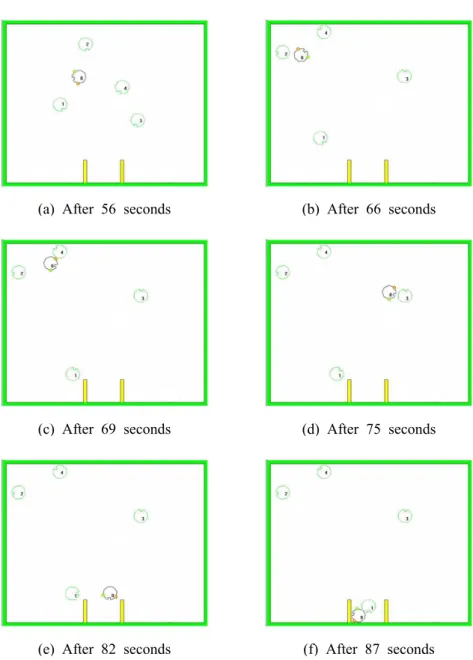
로 안정성을 향상시켰음을 알 수 있다. Fig. 18은 중에서 초에 사냥에 성공하는 모습을 task III 87
보여준다.
6. 결 론
본 연구에서 다 개체 로봇 시스템 구현에서 나
타내는 로봇 수의 증가에 따른 복잡성에 관한 문 제 약자와 강자 문제 개체의 능력에 따른 활동, , 영역문제 등을 해결하는 기법을 제안하였다 제. 시된 협업 기법은 시뮬레이션을 통해 검증되었 다.
본 논문에서 제안한 협업제어기를 이용하여 (1)
각 개체 로봇의 영상 정보를 통하여 물체의 위치 정보를 얻는다 각 개체의 물체들의 상대적인 위. 치정보들을 고려하여 사냥방법을 계획하며 사냥, 에 임할 로봇을 결정 개인 임무 작업순서 수행( , , 시간 하게 된다 개인임무에 따른 상대적 위치를) . 산출하여 각 로봇의 속도 명령을 전달하여 협업 (a) After 56 seconds (b) After 66 seconds
(c) After 69 seconds (d) After 75 seconds
(e) After 82 seconds (f) After 87 seconds
Fig. 18 The sequences of simulation result: hunting task : hunting time 87s
공간적 관계를 고려하여 충돌을 피하면서 임무를 수행할 수 있었다 최초로 발견된 로봇의 우선순. 위를 갖는 관찰조건을 이용하면 평균 유도 시간
초 초 을 감소시켰으며 유도 횟수
(131 ->116.8 ) 12%
회 회 는 증가되는 효과를 보았다
(12.95 ->14.9 ) 15% . 이것은 제한된 에너지 이동로봇의 건전지 용량 에( ) 더 많은 먹이 포획을 의미한다 로봇의 사용시간. 건전지 용량 을 제한함으로써 임무수행 중 발생
( )
하는 개체의 수 변화에도 유도횟수 변동률이 종 전의 24.6%에서 18.5%로 되어 안정성이 향상되었 다.
본 연구에서 제안한 방법을 이용하면 사냥 (3)
감 로봇의 회전각과 유도장소의 크기에 따른 차 단 불능 각도가 발생한다 이를 보완하기 위하여. 대 이상의 로봇과 유도장소의 크기 변화에 따른 5
차단방안의 연구가 더 필요하다.
참고문헌
(1) Navarro-Serment E. L., Paredis, C. and Khosla, P.
K., 1999, "A Beacon System for the Localization of Distributed Robotic Teams," in Proceedings of the International Conference on Field and Service Robotics.
(2) Dorigo, M. 2005, "Swarm-Bot : An Experiment in Swarm Robotics," Swarm Intelligence Symposium, SIS 2005. Proceedings 2005 IEEE.
Transactions of the KSME, A, Vol. 22, No. 5, pp. 877~888.
(4) Wang, W., Qi, J., Zhang, H. and Zong, G., 2007, "A Rapid Hunting Algorithm for Multi Mobile Robots," Industrial Electronics and Applications, ICIEA 2nd IEEE Conference.
(5) Lien, J. M., Rodriguez, S., Malric, J. P. and Amato, N. M. 2005, "Shepherding Behaviors with Multiple Shepherds," Proceeding of the 2005 IEEE international Conference on Robotics and Automation, Barcelona.
(6) Liu, S., Tian, Y. and Liu, J., 2004, "Multi Mobile Robot Path Planning Based on Genetic Algorithm,"
Proceedings of the 5th World Congress on Intelligent Control and Automation, pp. 15 19.
(7) Stephens, L. M. and Merx, M. B., "The effect of Agent Control Strategy on the Performance of a DAI Pursuit Problem," In Proceedings of the 1990 Distributed AI Workshop.
(8) Hanynes, T., Lau, K. and Sen, S., 1996,
"Learning Cases to Compliment Rules for Conflict Resolution in Multiagent Systems," AAAI Symposium on Adaptation, Co-evolution and Learning in Multiagent Systems, CA, March pp. 25~27.
(9) Sen, S., Sekaran, M. and Hale, J., 1994, "Learning to Coordinate Without Sharing Information," National Conference on Artificial Intelligence, pp. 426~431.