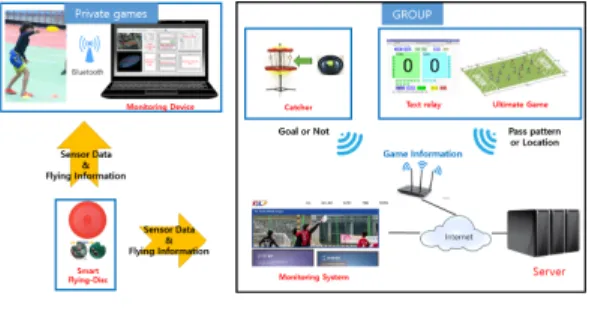
Smart Flying-Disc Monitoring System with IoT Technology
10
0
0
전체 글
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
수치

+2
관련 문서
문제정의하기 ( 고객이 갖는 문제에 대한 공감한 내용을 아래 밑줄에 채워보자 .... • 고객의 문제를 해결했는지를 신속하게 시제품을 만들고
I. 꿀벌통 속에서 일어나는 꿀벌의 성장 동영상을 본 후 USB 카메라를 통해 연결된 벌통 속 꿀벌들의 활동 모습을 휴대폰 앱으로 실시간 관찰해 봅시다... 꿀벌
How can Smart City Technology make our city more favorable.. 12/6,
‘꿀벌이 좋아하는 먹이’를 주제로 ‘꿀벌이 좋아하는 식물 화분 만들기’ 등 관심 분야를 결정하여 선택하게 하고 의견 수렴 을 통해 모둠별로 다양한 창의적 활동을
자료출처 IoT
최근 ICT(Information and Communication Technology)에서 스마트는 주요한 개념으로 자리 잡고 있는 데, 스마트폰이라는 대표적인 스마트 기기에서 출발하여 스마트
- Renewable E, waste recycling, technology / industrial clusters, infrastructure integrated design Underground transportation
• Select one of the elemental technologies of Smart City and describe the current level of this technology, the direction of future technology development, and the urban space to
