Localization of Mobile Users with the Improved Kalman Filter Algorithm using Smart Traffic Lights in Self-driving Environments
1)
전체 글
1)
수치

관련 문서
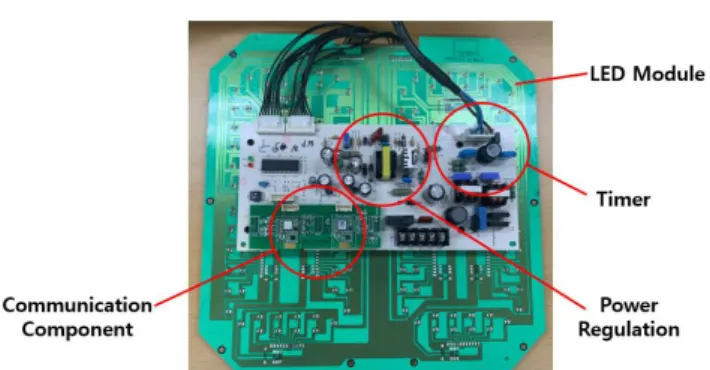
그러나 도로에 설치되어 있는 신호등을 활용하여 연구를 진행하기에는 현실적으로 무리가 있기에 Arduino 를 활용하여 신호등과 유사한 기능을 하는 기기를 제작하고
본 연구는 선행연구를 토대로 하여 중국 모바일 사용자들이 모바일 간편 결제서비스 의 만족도 및 만족도를 매개로 모바일 결제 서비스 사용자의 지속사용의도에 영향을
우리 생활에 다양한 스마트 제품 사례를 통해 스마트 디자인이 어떤 방식으로 적용될 수 있는 지를 살펴보고, 스마트 새집에 사용할 센서의 기능과 전자회로에
특히 본 과정을 통해 누구나 손쉽게 빅데이터 분석기술을 활용하여 사회 문제를 분석하고, 모바일 솔루션을 개발하 여 이를 해결할 수 있는 능력을 갖출
특히 본 과정을 통해 누구나 손쉽게 빅데이터 분석기술을 활용하여 사회 문제를 분석하고, 모바일 솔루션을 개발하 여 이를 해결할 수 있는 능력을 갖출
변수 이름 x를 만나면 symtable[]에서 해당 위치를 lookup()해서 찾고 저장되어 있는 값을 사용한다 ... E을
Keywords : Developmental disability, Right to self-determination, Guardianship for adults, Crimes related to mobile phones, Convention on the Rights of Persons
낮은 출력 임피던스: 필터가 구동될 때 부하의 영향으로부터 필터를 보호 요구되는 응답을 수정할 필요 없이 넓은 주파수
