大 韓 土 木 學 會 論 文 集 第29卷 第4D 號·2009年 7月 pp. 523~533
鐵 道 工 學
능동제어를 고려한 자기부상열차와 가이드웨이 교량의 동적상호작용 해석
The Dynamic Interaction Analysis of Actively Controlled Maglev and Guideway Bridge Systems
이준석*·권순덕**·여인호***·김문영****
Lee, Jun-Seok·Kwon, Soon-Duck·Yeo, In-Ho·Kim, Moon-Young
···
Abstract
The purpose of the present study is to examine the dynamic interaction characteristics between moving maglev vehicle and guideway bridge system. For this purpose, the dynamic governing equation of 2-dof maglev vehicle using optimal feedback control scheme of LQG was derived with or without consideration of the dynamic interaction between vehicle and guideway bridge system. From the parametric study, it was found that the dynamic interaction effect between bridge and vehicle was large in case of neglecting the railway roughness effect. But if the railway roughness effect was considered, it was observed two analysis results with or without consideration of the dynamic interaction did not show big difference. As a conclusion, it is required to take into account the dynamic interaction effect of bridge and maglev vehicle and the railway roughness for precise evaluation of runnability of maglev vehicle and impact factor of guideway.
Keywords : maglev, guideway, roughness, runnability, active control, dynamic interaction analysis
···
요 지
본 연구는 주행하는 자기부상열차와 교량간의 동적상호작용 특성을 파악하는 것이다. 이를 위해서 차량에 의한 교량의 정 적처짐을 레일조도에 포함시켜 가진형태로 고려되는 2자유도 자기부상열차의 운동방정식과 동적상호작용에 의한 교량의 동 적처짐을 레일조도와 함께 고려된 열차의 운동방정식을 각각 유도하였다. 이때 EMS위치에서의 부상공극 및 연직방향의 상 태로부터 전상태를 추정하는 LQG기법을 고려하였다. 수치해석결과 레일조도가 없는 경우에는 자기부상열차의 주행성에 차량- 교량간의 동적상호작용효과가 현저하게 커지지만, 레일조도가 고려될 경우에는 교량의 정적처짐을 가진으로 고려한 경우와 동적상호작용을 고려한 해석결과의 차이가 크지 않다는 것을 관찰할 수 있었다. 결론적으로 교량의 충격계수와 자기부상열차 의 주행성능을 정확히 파악하기 위해서는 레일조도를 포함하는 교량-차량간의 동적상호작용해석이 필요한 것으로 판단된다.
핵심용어
:자기부상열차, 가이드웨이, 조도, 주행성, 능동제어, 동적상호작용해석
···
1.
서 론
자기부상열차의 근본개념은 1930년대 독일에서 처음 나온 이래 1970년대부터 독일과 일본에서 집중적으로 연구되고 있다.
특히 2003년부터는 독일에서 개발된 초고속 자기부상열차
Transrapid
가 중국 상하이에서 상업운행중이며, 일본의 경우
도 자기부상열차인 MLX(Magnetic Levitation eXpress) 및 도시형 자기부상열차인 HSST(High Speed Surface Transport) 의 개발에 투자하고 있다. 도시형 자기부상열차의 경우에도 전체 사업비의 37%가 선로(가이드웨이)를 건설하는데 필요 하다는 연구가 있다(Thornton, 2004).
그러나 대부분의 선진국은 이미 철도 인프라가 구축되어
있고, 바퀴를 사용한 고속열차 시스템도 갖추어져 있다. 따 라서 새로운 선로 건설이 필요한 자기부상열차는 시험선을 제외하고는 경제성이나 호환성 때문에 제대로 건설되지 못하고 있다. 이러한 이유로 독일에서 개발된 초고속 자기부상열차인
Transrapid
도 자국에서 상용화되지 못하고 중국 상하이에 건
설되었다. 이런 측면에서 우리나라도 KTX가 이미 건설되어 있으므로 도시지역의 경전철 등을 대신할 수 있는 최고속도
100km/h
의 중저속 도시형 자기부상열차사업을 현재 진행 중에
있고 한국기계연구원을 중심으로 ROTEM 등의 회사가
1990년대 초부터 초고속열차가 아닌 지하철이나 경전철을 대 신하는 도시형 자기부상열차를 목표로 개발 중에 있다(건설 교통부, 1997). 현재 차량은 시제품 첫 번째 모델을 개발했
*(주)청석엔지니어링 과장·공학박사 (E-mail : [email protected])
**정회원·교신저자·전북대학교토목공학과부교수·공학박사 (E-mail : [email protected])
***정회원·한국철도기술연구원 선임연구원·공학박사 (E-mail : [email protected])
****정회원·성균관대학교건설환경시스템공학과교수·공학박사 (E-mail: [email protected])
− 524 − 으며, 한국기계연구원내에 길이 1Km 남짓의 시험선로를 운영 중이다. 국내에서도 다양한 범위에서 자기부상열차와 관련된 연구가 선행되고 있는데(조흥제 등, 1998) 주로 초기 제작과 정의 자기부상열차의 실험과 관련된 논문 및 제어관련 부분이 생략된 해석논문이 다수를 차지하고 있으며, 최근에(한형석 등, 2007) UTM-01(02)의 제어기를 포함하는 주행성능파악을 연구하고 있으나 주로 주파수영역 해석법에 의한 제어기의 특성파악에 주목하고 있는 편이다.
한편 국내외에서 열차 및 차량과 교량간의 상호작용해석이 상당수의 논문으로 발표된바 있고(Yang과 Lin, 1995; 박흥석
1998;
김성일 2000; 서정인과 김호경, 2000; 김문영 등, 2004;
김문영 등, 2005), 자기부상열차와 교량간의 상호작용해석도 시도된바 있으나(송명관, 김경호, 2005; 권순덕 2005; Hedrick 등, 1975; Cai 등, 1994) 자기부상열차의 경우 전자기력의 특성을 등가의 스프링으로 치환하는 수동제어기법을 적용하 고 있다. 이러한 등가의 스프링으로 치환된 자기부상열차의 경우 자기부상열차의 주행중 부상공극응답을 적절히 묘사할 수 없다. 따라서 자기부상열차의 주행성능에 주요설계요인인 부 상공극의 응답을 파악하기 위해서는 자기부상열차의 전자석
(EMS, Electronic Magnetic Suspension)
에 능동제어기법이
적용되어야 한다.
이러한 측면에서 본 연구에서는 부상공극의 피드백을 포함 하는 능동제어되는 2자유도 자기부상열차와 가이드웨이 교량
간의 상호작용해석방법을 제시하고 해석을 수행하였으며 상 호작용이 고려되지 않을 경우의 차량 및 교량의 응답과 비교 분석하였다. 해석시에는 25m 단경간 교량의 처짐비, 차량의 속도 및 레일조도가 자기부상열차의 부상공극(Air Gap,
Clearence)및 교량의 DMF(Dynamic Magnification Factor)에 미치는 영향을 중심으로 분석하였다. 해석차량은 국내에서 개발된 UTM-01(그림 1)의 제원을 사용하였다.
2.
능동제어계의 지배방정식
2.1
자기부상력
자기부상열차는 정지상태, 정지부상상태, 운동상태 등으로 상태를 표현할 수 있으며, 여기서 정지상태란 자기부상열차에 아무런 전자기력이 가해지지 않으므로 완전정지상태를 의미 하고, 정지부상상태란 연직방향으로의 전자기력이 발생하여 공칭부상간격(z
0)를 유지하는 상태, 그리고 운동상태란 정지 부상상태에서 진행방향으로 운동할때를 의미한다. 운동시에는 교량의 처짐(v
g)및 자기부상열차 자체의 운동이 발생하게 된다(그림 2).
진행방향으로 운동시를 기준으로 볼때 자기부상열차는 대 차에 설치된 전자석으로부터 부상력을 얻어서 가이드웨이 위를 떠서 지나게 된다. 이렇게 대차와 가이드웨이 사이에 설치된 전자기력을 발생시키는 시스템을 EMS(Electro-Magnetic
Suspension)
라 하며, 자기부상열차의 핵심적이 요소이다(그림 3).
자기부상열차에서는 대차의 센서위치에서 초당 수백~수천번 씩 대차와 가이드웨이의 간격(부상공극) 및 대차의 연직방향의 가속도 등 시스템의 상태를 관측하고, 이를 바탕으로 전자기 력을 조정하여 적절한 부상간격을 유지하면서 주행하게 된다.
이때 시스템의 상태를 관측하여 이에 따라 적절하게 주행상태를 유지시켜주기 때문에 이를 능동제어계(active control system) 라고 한다. 이와 대조적으로 바퀴식 열차의 경우 휠과 레일간 의 마찰에 기인하는 작용-반작용에 관계의 의한 일종의 수동 계(passive system)의 형태로 불리운다. 바퀴식 열차의 경우 일반적으로 스프링과 댐퍼로 구성되는 모델로 치환하여 그 그림
1.중저속 자기부상열차
UTM-01그림
2.자기부상열차의 운동상태
운동형태를 묘사할 수 있지만, 자기부상열차의 경우에 스프 링과 댐퍼로 치환하여 운동을 묘사할 수 없다. 즉, 자기부상 열차의 경우 능동제어계의 피드백 구조를 이용해야 거동을 정확히 표현할 수 있다.
EMS
에서 발생하는 자기부상력과 입력 전류의 관계는 비 선형이다. 하지만 정지 부상 간격(z
0)이 확보된 다음에는 아래 식과 같이 선형화가 가능하다(Sinha, 1987).
Fm= Fm0+∆Fm (1)
(2)
(3)
여기서, i
0,∆i: 초기 및 변동 입력전류, A
m:자석 면적,
µ0:진공에서 투과계수, N
m:코일수, F
m0:정적 평형상태에서의 부상력, F
m:총 부상력, ∆F
m:변동 부상력, z
0과 ∆z
bg:그림
2에 표시된 정적 평형상태의 부상공극(공칭부상공극, nominal
air gap)
및 부상공극의 변화량, k
i과 k
z:전류와 공극에 비
례하는 등가 강성이다.
식 (3)을 보면 앞에 (-)부호가 있으므로 부상공극이 커질수록 부상력은 약해지나, 제어에 의해서 입력전류의 세기를 키워서 부상력을 벌충하게 된다. 한편 입력전류의 변화량과 부상공극 및 제어전압은 다음 식 (4)와 같은 관계가 있다(Sinha, 1987).
(4)
여기서, R
0:자석의 릴럭턴스, L
0:자석의 인덕턴스, ∆v: 제 어전압이며 인덕턴스는 다음과 같이 나타낸다(Sinha, 1987).
(5)
식 (4)의 ∆
υ는 시스템의 상태를 관측하고 제어기(본 논문 에서는 LQG를 사용함)를 통과함으로써 얻어지는 값이다.
본 논문에서는 실제 차량을 1지점 이동으로 단순화하였고 따라서 차량은 단순히 연직방향운동(bouncing) 만을 한다고 고려하였다. 또한 교량의 질량 등에 의한 동특성 등을 고려 하지 않으며 교량의 처짐을 미리 가정하여 차량의 속도에만 영향을 가진다고 가정하였다.
2.2
제어기를 포함하지 않은 자기부상열차
-교량 비연동
(Uncoupled)운동방정식
자기부상열차는 부상력과 관련된 수직방향 거동이 중요하므로 본 연구에서는 자기부상열차를 객차와 대차로 구성된 2자유 도계로 단순화하였다. 그림 2와 같이 자기부상열차의 객차와 대차 사이에는 2차 현수장치인 에어스프링이 설치되어 있고, 가이드웨이와 대차 사이에는 EMS에 의한 자기부상력이 작 용한다.
이동하중의 경우에 가이드웨이의 동특성을 전체 운동방정식에 포함시키면 감쇠 및 강성 행렬이 시간에 따라 변하는 시스템이 되어서 제어계를 구성하기가 쉽지 않게 된다. 그래서 Morita
(2004)
나 Fang(2004) 등은 교량의 정적 처짐을 차량의 지점
가진으로 입력하는 간접적인 방법을 사용하였다. 2.2절에서는 이와 같이 가이드웨이 교량의 동특성을 운동방정식에 포함하지 않고, 미리 계산된 정적처짐 형상을 일종의 조도처럼 입력하 였다. 이와 같은 방법은 교량을 단순히 정적처짐으로 가정하기 때문에 해석시 교량의 동특성을 고려할 수 없으나 수식전개가 비교적 간단명료하여 자주 쓰이고 있다. 그림 2를 고려하면
2자유도 자기부상열차의 운동상태는 다음 그림 4와 같이 나 타낼 수 있으며, 운동방정식은 식 (6)과 같다.
Fm0
µ
0NmAm2i02 4z02 ---=
Fm
∆ µ
0Nm2Ami0 2z02--- i t
∆ ( ) µ
0Nm2Ami02 2z03 ---–
∆
zbg( ) k
t = i∆
i t( )
–kz∆
zbg( )
t=
i·
∆
kz ki---- z
∆
bg R0 L0 --- i∆
1L0 --- v
∆
+ –=
L0
µ
0Nm2Am 2z0 ---=
그림
3. EMS시스템
− 526 −
(6a)(6b)
여기서 ∆z
cb=zc−zb−zc0,∆z
bg=zb−z0−vg−zr을 의미하며, m
c', mb:객차와 대차의 질량, k
s', cs: 2차 현수장치의 강성 및 감쇠, v
g, :대차 밑의 가이드웨이 처짐 및 가속도, z
r, :대차 밑의 레일 조도 및 그 가속도 ∆z
cb:객차와 대차 사 이의 상대변위의 변동성분, ∆z
bg:대차와 가이드웨이 사이의 상대변위(공극)의 변동성분, z
c0:객차의 대차에 대한 정적 처짐성분(=m
cg/ks, g는 중력가속도)이다.
이제 식 (6)에 전자석의 운동방정식인 식 (4)을 포함시키면 비연동된 2자유도 차량의 운동방정식을 다음과 같이 행렬로 구성된 운동방정식의 형태로 표현가능하다.
(7a)
여기서, 각 행렬들은 다음과 같다.
(7b)
(7c)
u(t)=∆v(t) (7d)
(7e)
(7f)
식 (7a)의 우측 항 중에서 식 (7f)는 교량의 처짐과 레일 조도의 처짐을 시간에 대해서 두 번 미분한 가속도항으로 차량에 외력으로 작용하여 비연동해석시 차량에 외적 가진 으로 작용하게 된다.
2.3
제어기를 포함하지 않은 자기부상열차
-교량 연동
(Coupled)운동방정식
앞서 2.2절에서 언급한 비연동 운동방정식의 경우 교량의 동특성을 고려할 수 없으므로 본 절에서는 교량의 동특성을 고려하고 자기부상열차와 교량간의 상호작용이 고려된 연동 된(coupled) 운동방정식을 유도한다.
가이드웨이와 2자유도 차량모델을 연동시키기 위해서 모우드 중첩법을 이용하였다. 크기 F
m을 가지고 이동하는 하중에 의해 시간 t에서 x만큼 떨어진 교량의 연직변위를 v
g(x,t)라고 할 때, 임의 점의 연직변위는 다음과 같이 n개의 모우드에 대 해서 일반화된 좌표 y
i(t)와 진동 모우드
φi(x)의 곱을 중첩시 켜서 표현 가능하다.
(8)
여기서 i번째 모우드에 대응하는 단경간 교량의 진동수 및 모우드 형상은 다음과 같다.
(9a)
(9b)
한편, 차량이 등속도 V로 이동할 때 임의 시간 t에서 자 기부상력의 작용위치를 x
1(=Vt)로 나타내면 가이드웨이의 운
z··c( )
t –ks mc--- z
∆
cb( )
t –cs mc ---∆
·zcb
( )
t +=
z··b ks mb
--- z
∆
cb( )
t cs mb ---∆
·zcb
( )
t ki mb --- i∆
–( )
t kzmb --- z
∆
bg + +=
v··g z··r
x· t
( ) A
= 0x t( ) B
+ 0u t( ) H
+ 0w0( )
tA0
0 0 1 0 0
0 0 0 1 0
ks mc --- ks
mb ---
⎝
+⎠
⎛ ⎞
– kz
mb ---
– cs
mc --- cs
mb ---
⎝
+⎠
⎛ ⎞
– 0 ki
mb --- ks
mb --- kz
mb --- cs
mb
--- 0 –ki mb ---
0 0 0 kz
ki ---- –R0
L0 ---
=
B0 0 0 0 0 1 L0 ---
⎩ ⎭
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨ ⎬
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎧ ⎫
=
H0 0 0 0 1
⎩ ⎭
0⎪ ⎪ ⎪ ⎪
⎪ ⎪ ⎨ ⎬
⎪ ⎪ ⎪ ⎪
⎪ ⎪ ⎧ ⎫
=
w0=v··g
( ) z··
t – r( )
tvg
(
x t( ) ) φ
i( )y
x i( )
ti=1
∑
n=
ω
i i2π
2 EI mL4--- i 1 2 3 … n=
, , , ,
=
φ
i( )
x nπ ---xL⎝ ⎠
⎛ ⎞ i 1 2 3 … n
=, , , ,
sin=
그림
4.자기부상열차
-가이드웨이 해석모델
그림
5.이동하중에 의한 교량의 동적처짐
동방정식은 다음과 같이 쓸 수 있다(그림 5 참조).
(10)
여기서 δ(x)는 Dirac-delta 함수를 나타낸다.
이제 식 (8)을 식 (10)에 대입하고, 진동 모우드의 직교성을 고려하면 다음과 같이 나타낼 수 있다.
(11)
식 (11)의 양변에
φi를 곱하고 진동모우드의 직교성을 이 용하여 가이드웨이 전구간에 대하여 적분을 행하면 다음 식을 얻을 수 있다.
(12)
가이드웨이의 감쇠력은 비례감쇠(proportional damping)로 가정할 수 있다. 이 경우 감쇠항 2
ξiωi를 추가하고, 양변을
로 나누어주면 식 (12)는 다음과 같이 된다.
(13)
따라서 임의 시간 t에 차량의 위치 x
1(=Vt)을 통과할 때 자기부상열차-가이드웨이 사이의 연동된 운동방정식은 다음과 같이 유도된다.
(14a) (14b)
(14c)
여기서, ∆z
cb=zc−z
b,∆z
bg=zb−v
g−z
r을 의미하며, 연동해석시에 차량위치에서의 교량의 처짐 v
g는 전체 시스템의 해로부터 얻게되어 식 (7)의 비연동해석시와 구별된다.
2.4
능동제어 알고리즘
본 연구에서는 EMS위치에서의 자기부상열차의 부상공극 및 연직가속도를 관측하여 관측된 상태로부터 전상태를 추정하는 상태추정기법을 적용한다. 이를 위해서 Kalman이 제시한 방 법을 적용하여 상태를 추정하고 되먹임시에는 추정된 상태 벡터로부터 전상태 피드백 기법인 LQR(Linear Quadratic
Regulator)을 이용하는 LQG(Linear Quadratic Gaussian) 제어 기를 사용하였다. 실제 UTM-01의 상태추정방법 및 피드백 기법은 다르나 부상공극 및 연직가속도로부터 상태를 추정 하는 것은 동일하다.
전상태 관측 제어기인 LQR기법을 이용한 비연동된 자기 부상열차의 운동방정식은 선행논문(이준석, 2009)를 참조할수 있으며, 본 논문에서는 연동된 자기부상열차의 운동방정식에
LQG기법을 적용한 형태를 기준으로 설명한다.
자기부상열차와 교량간의 상호작용이 고려된 식 (14)와 자 기부상열차의 전류식 (4)를 고려하여 상태공간방정식의 형태로
나타내면 다음과 같이 행렬방정식의 형태로 나타낼 수 있다.
(15)
여기서 상태벡터 x=
이며, (·)는 시간 t에 대한 미분을 의미한다. 식 (15)의 A,
B, u(t), H및 w(t)의 상세는 부록을 참조할 수 있다.
식 (15)에서 상태 벡터는 상대 변위와 한번 미분치인 상대 속도 그리고 전류로 구성된다. 본 연구에서 사용한 최적제어 이론은 식 (15)의 제약조건하에서 응답과 제어력의 성능지수를 최소화시켜고, 행렬 Riccati 방정식을 풀어서 최적 제어 이득
(G)을 구하였으며(Soong, 1990) 상태추정은 Kalman의 방법을 적용하였다. 이 과정에서 필요한 제어이득 및 상태추정에 관한 함수는 MATLAB(2004)을 사용하여 구현하였다.
센스의 잡음과 외력을 고려하여 얻은 상태벡터 x에 대응 되는 추정상태 의 상태추정식은 다음과 같이 쓸 수 있다.
(16)
여기서, 상태추정벡터 는 5개의 상태를 추정하는 것으로 가정하며, 이는 각각 = [
, , , , ]T에 해당 된다. L은 관측되먹임 행렬로써 최적제어이득(G)과 같이
Riccati
방정식을 풀어서 얻으며 부록에 수록하였다.
EMS
위치에서의 연직가속도와 부상공극을 관측가능한 벡 터로 선택하고 센서의 백색잡음 f(t)를 포함하면 y(t)는 다음 과 같다.
(17)
제어전압은 다음과 같이 추정된 상태로부터 되먹임하게 된 다. 행렬 G도 부록에 수록하였다.
(18)
식 (15~18)을 고려하여 운동방정식을 재정리하면 최종적인 지배운동방정식은 다음과 같다.
(19)
식 (19)의 구체적인 행렬들은 부록에 수록하였다. 식 (19)는 차량의 위치에 따라 상태행렬들이 교량과 상호작용에 의해서 변하게 되는 시변(time-variant) 시스템이다. 결국 전체운동방 정식인 식 (19)는 연립상미분방정식이 되므로 해석시에는
Runge-Kutta
방법을 적용하여 수행하였다.
식 (16)~(19)에 쓰인 각 행렬들은 다음과 같이 정의된다.
A :
상태행렬(state matrix)
B :
제어기 위치행렬(location matrix of controller)
C :상태측정행렬(measurement matrix of state)
D :제어측정행렬(measurement matrix of controller)
f :센서의 노이즈벡터(sensor noise vector)
G :
상태피드백게인행렬(state feedback gain matrix)
H :외진 위치 행렬(location matrix of excitation)
L :관측게인행렬(observer gain matrix)
u :
제어력벡터(control force vector )
EI∂
4vg( )
x t,
∂x
4--- m
∂
2vg( )
x t,
∂t
2 ---+ =Fm
( ) x x
tδ (
– 1)
m y··j
φ
j i=1∑
n EI yjφ″″
i 1=
∑
n+ =Fm
( ) x x
tδ (
– 1)
my··iL EIyi nπ ---L
⎝ ⎠ ⎛ ⎞
4L 2F= m( )φ
t i( )
x1 +mL
y··i
( ) 2ξ
t iω
iy·iω
i 2yi 2mL
---
φ
i( )F
x1 m( )
t=
+ +
y··i
( ) 2ξ
t + iω
iyi( ) ω
t + i2yi( )
t 2mL
---
φ
i( ) F
x1{
m0+ki∆i t() k
– z∆
zbg( )
t} i 1 2 3 … n (
=, , , , )
=
z··c
( )
t –ks mc--- z
∆
cb( )
t cs mc --- z·∆
cb( )
t +=
z··b
( )
t ks mb--- z
∆
cb( )
t cs mb --- z·cb kimb
--- i t
∆ ( )
kz mb --- z∆
bg( )
t +∆
– +=
x· t
( ) Ax t
=( ) Bu t
+( ) Hw t
+( )
y1
…y
n,
y·1…y·
n, ∆
zcb, ∆
zbg, ∆
z·cb, ∆
z·bg, ∆
i[ ]
Txˆ
xˆ· =A0xˆ t
( ) B
+ 0u0( ) L y t
t +{ ( ) C
– 0xˆ t( ) }
xˆ
xˆ
∆
zcbˆ∆
zbgˆ∆
zˆ·cb zˆbg∆
·∆
iˆy t
( )
z··b zbg⎩ ∆ ⎭
⎨ ⎬
⎧ ⎫
Cx t
( ) f t
+( )
= =
u t
( )
=∆
v t( )
=–Gxˆ t( )
x· t
( )
xˆ t( )
⎩ ⎭
⎨ ⎬
⎧ ⎫
A –BG LC Ex t
( )
xˆ t( )
⎩ ⎭
⎨ ⎬
⎧ ⎫ H 0
0 Lw t
( )
f t( )
⎩ ⎭
⎨ ⎬
⎧ ⎫
+=
− 528 −
w :외부가진벡터(external excitation vector)
x :
상태벡터(state vector)
:
상태추정벡터(state estimator vector)
y :관측벡터(output vector)
3.
해석 예제
그림 1에 나타난 만차시의 UTM-01 중저속 자기부상열차 제원은 표 1과 같다. UTM-01은 하나의 객차와 세 개의 대 차로 구성되며, 하나의 대차에는 양쪽에 각각 4개씩 전자석이 설치되어 있다(정정훈, 2006). 그림 3과 같은 해석모델을 사 용하므로 대차의 제원은 3개를 통합하여 나타내었고, 정지부 상간극(z
0)은 11mm이다.
자기부상열차에 작용하는 외력은 크게 레일조도, 선로처짐, 풍하중으로 나눌 수 있다. 본 연구에서는 이중에서 풍하중을 제외하고 레일조도를 고려하였으며, 비연동해석시에는 선로 처짐을 식 (7)의 가장 오른쪽 항에 와 같이 외란(상호 작용이 되지 않고 시스템, 즉 차량에 시간에 따라 작용하는 외부하중)으로 입력하게 되고, 상호작용이 고려되는 연동해 석시에는 선로처짐을 외란으로 두지는 않게 된다.
본 연구에서 사용한 레일 조도는 측정치에 바탕을 두고 있다. 한국기계연구원(KIMM) 자기부상열차 시험선로에서 측 정한 가이드웨이의 고도 정보로부터 측정된 조도는 다음 그림
6과 같다. 시험선 레일조도는 측정구간 146.8m 및 184.9m에서 최대 및 최소가 나타나고 변동률은 -3.2mm~+4.1mm이다.
그림 7은 경간장 L=25m, 1차 고유진동수
ω1=22.7(rad/sec),
감쇠비
ξ=0.02의 단순교 형식의 교량을 차량이 시속
V=120km/h
로 주행시 교량 및 차량 위치별로 나타낸 것이다
.
그림에서 가로축은 차량의 위치를 경간장으로 나눈 값으로 써 정수에 해당되는 부분이 교량의 진입로에 해당되는 무차
원량이다. 그림에서 점선은 비연동 차량의 응답을 나타내고, 실선은 연동된 차량의 응답 및 교량의 응답을 나타내고 있 다.
그림 7(a)는 레일조도를 무시한 경우 연동-비연동 해석결과를 비교하였으며, 그림에서 보듯이 비연동시 교량은 미리 처진형 태로 주어지므로 차량 주행시 교량의 응답은 미리 처진 형태 그대로다. 하지만 연동시에는 차량이 교량의 응답에 영향을 미치며 교량의 동특성 역시 차량의 응답에 영향을 미친다.
1:1500
의 처짐비를 갖는 해석예제의 교량의 경우 교량중앙부
연직처짐의 최대 동응답이 17.1mm정도 나타나고 있으며 부 상공극, 전류, 전압 캐빈의 연직가속도가 그림과 같이 상호 작용에 의해 강한 영향을 받는 것을 알 수 있다. 전체적으로 연동시의 교량의 응답이 비연동시의 교량의 응답에 비해서 크게 나타남을 알 수 있다.
그림 7(b)는 레일조도를 고려한 경우에 대한 연동 해석과 비연동해석에 관한 시간 이력해석결과이다. 그림에서 보듯이 레일조도에 의한 영향을 두가지 해석방법에서 모두 받고 있 으며 이로 인해 교량의 동특성이 레일조도를 무시한 경우에 비해서 상대적으로 작아지는 것을 볼 수 있다.
결국 그림 7로부터 알 수 있듯이 교량을 지점가진형태로 해석하는 비연동해석의 경우에는 교량의 동적효과를 고려할 수 없기 때문에 주행하는 자기부상열차에 의한 교량의 동적특 성을 밝히기 위해서는 동적상호작용해석이 필요하다.
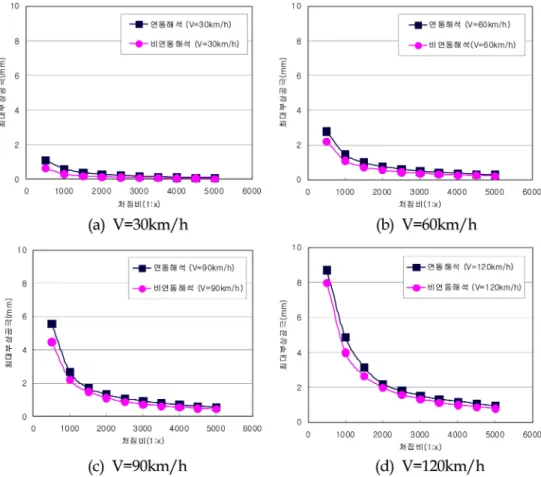
그림 8과 9는 처짐비에 따른 연동해석 및 비연동해석시의 자기부상열차의 부상공극응답의 최대값을 차량주행속도 30,
60, 90, 120km/h
에 대해서 도시한 것이다. 그림 8은 레일조
도를 무시한 경우이며 그림 9는 레일조도를 고려한 경우이다.
그림 8에서 보듯이 차량의 속도가 증가할수록, 그리고 처짐 비가 작아질수록(교량강성이 커질수록) 연동해석과 비연동해 석의 차이가 줄어들고 있다. 이는 교량강성이 증가함에 따라 교량 진동특성이 줄어들기 때문이며, 차량의 속도가 고속일 수록 차량의 진동특성이 교량의 진동특성보다 커지기 때문 으로 판단된다.
그림 9와 같이 레일조도를 고려한 경우 연동해석결과와 비 연동해석결과는 레일조도를 고려하지 않은 경우에 비해서 상 대적으로 줄어든다. 이는 레일조도가 연동해석시와 비연동해 석시 모두 교량의 응답과는 무관하게 미리 정해져 있기 때 문으로 두 가지 해석방법에 모두 외력가진으로 작용하기 때 문이다. 즉, 자기부상열차의 이동중 부상공극은 레일조도 고
xˆv··g
( )
t –표
1. 2자유도화 된
UTM-01의 제원
항목 값 항목 값
차체질량(m
1)
20,000kg진공중투자율( µ
0) 4 π
×10−7H/m대차질량(m
2)
9,300kg전자석코일수(n
m)
6602차현가장치강성(k
s) 451.8kN 전자석넓이(A
m)
0.04m22차현가장치감쇠(c
s) 56.28kNs/m 공칭부상공극(e
20)
0.01m전기저항(R
0)
38.4Ω 공칭부상전류(i
0)
20A그림
6.측정된 레일 조도
, zr(x)려시가 고려하지 않을시에 비해 전반적으로 커지게 되나, 이 때 상호작용 연동시와 비연동시의 상대적인 차이는 줄어들게 된다.
한편 그림 7과 그림 8에서 보듯이 저속구간에서는 레일조
도를 고려한 경우의 응답이 고려하지 않은 경우보다 매우 크
지만, 고속구간에서는 레일조도를 고려한 경우와 고려하지
않은 경우의 차이가 크지 않다. 이는 저속구간에서는 레일조
그림
7.자기부상열차
-교량간의 상호작용 연동시
(coupled)및 비연동시
(uncoupled)자기부상열차와 교량의 주행시 응답 비교
− 530 − 도의 영향이 크지만, 고속구간에서는 교량의 영향이 더 큰 것을 의미하고, 저속시에는 상대적으로 주기가 짧은 레일조도 의 영향이 크며, 고속시에는 상대적으로 주기가 긴 교량의
변위응답에 영향을 주로 받는 것을 의미한다.
결국, 토목분야에서 교량의 시공시에는 레일조도의 경우 시
공시 정밀측량 및 장대레일을 사용함으로써 어느 정도 줄일 수
그림
7.자기부상열차
-교량간의 상호작용 연동시
(coupled)및 비연동시
(uncoupled)자기부상열차와 교량의 주행시 응답 비교
(계속
)있고, 교량의 경우 동일한 단면을 가질 경우 연속교형식이 단순교 형식에 비해 처짐이 줄어들게 되므로 자기부상열차의 주행성능에 도움을 줄 수 있는것을 의미한다.
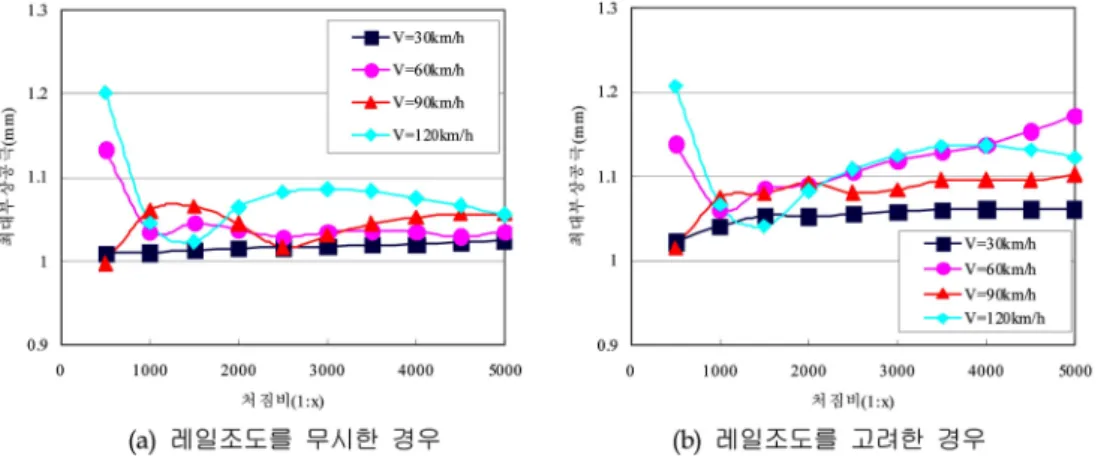
그림 10은 레일조도를 무시한 경우와 고려한 경우에 대해서 교량의 DMF(Dynamic Magnification Factor, 동적확대계수
=
동적최대처짐/정적최대처짐)를 비교한 것이다. 교량간의 상 그림
8.처짐비에 따른 부상공극 응답변화
(레일조도 무시한 경우
)그림
9.처짐비에 따른 부상공극 응답변화
(레일조도를 고려한 경우
)− 532 − 호작용만을 고려한 그림 10(a)에서 보듯이 교량이 유연할수록 차량의 속도에 의해 교량의 DMF가 커진다. 또한 레일조도를 고려하였을 경우에도 전반적으로 DMF의 값이 상승하는 것을 확인 할 수 있다. 이러한 교량의 DMF는 교량설계시 매우 중요한 요소로써 자기부상열차-교량간의 동적 상호작용에 의 해서만 해석이 가능하다.
4.
결 론
교량-자기부상열차의 동적상호작용 응답이 자기부상열차의 응답 및 교량의 응답에 미치는 영향을 살펴보았다. 이를 위해서 상호작용이 고려되지 않는 교량의 효과에 의한 차량의 주행 성능과 상호작용이 고려될 경우의 차량의 주행성능을 비교 분석하였으며, 동시에 레일조도의 유무가 동적응답에 미치는 영향을 살펴보았다. 해석결과 다음과 같이 내용을 정리한다.
1.
레일조도를 무시할 경우 자기부상열차의 주행 중 부상공 극은 비연동해석시보다 동적상호작용이 고려된 연동해석 시 더 크게 나왔다.
2.
레일조도를 고려한 경우 연동해석결과와 비연동해석 결과 는 레일조도를 고려하지 않은 경우에 비해서 상대적으로 줄어든다. 이는 레일조도가 연동해석 및 비연동해석시 모 두 외적 가진으로 작용하기 때문이며, 저속시에는 상대적 으로 주기가 짧은 레일조도의 영향이 크며, 고속시에는 상 대적으로 주기가 긴 교량의 변위응답에 영향을 주로 받는 것을 의미한다.
3.
레일조도를 고려한 경우 교량의 DMF는 고려하지 않은 경우에 비해서 크게 나타난다. 이러한 교량의 DMF의 경우 는 교량과 자기부상열차간의 동적상호작용이 고려된 경우 만 해석이 가능하다.
본 논문에서는 자기부상열차를 주행시 연직방향의 운동만이 묘사되는 1지점 2자유도로 구성하였지만 향후 열차의 자유도를 증가시키고, 횡방향 해석기능을 추가한다면 보다 엄밀한 결과를 얻을 수 있을 것으로 생각된다.
참고문헌
건설교통부(1997) 도시형자기부상열차 실용화에 대비한 성능시험, 평가기술개발(I).
권순덕(2005) 자기부상열차-교량 상호작용에 관한 기본연구,
2005대한토목학회 정기학술대회, 대한토목학회, pp. 576-579.
김문영, 임명훈, 권순덕, 김호경(2004) 전단변형효과를 고려한 현 수교의 교량-차량 상호작용 해석, 한국지진공학회 논문집, 한 국지진공학회, 제8권, 6호, pp. 1-11
김문영, 임명훈, 권순덕, 김호경, 김남일(2005) 휨 및 비틀림 거동 및 전단변형 효과를 고려한 차량-현수교의 동적 상호작용 해석, 한국전산구조공학회 논문집, 한국전산구조공학회, 제18권, 제
4호, pp. 361-372.
김성일(2000) 고속철도 교량의 교량
-열차 상호작용해석, 박사학위 논문, 서울대학교 대학원.
박흥석(1998) 개선된 고속철도열차모형을 사용한 교량의 동적해석 에 관한 연구, 박사학위논문, 연세대학교 대학원.
서정인, 김호경(2000) 현수교의 정착 형식에 따른 이동하중에 의한 동적 응답의 비교. 한국강구조학회 논문집, 한국강구조학회, 제12권 1호, pp. 103-110.
조흥제, 이종민(1998) 상전도자기부상열차의 주행성능시험 및 평가, 한국소음진동공학회
1998년도 춘계학술대회논문집, 한국소음 진동공학회, pp. 102-107.
정정훈, 한형석, 성호경, 허영철, 김병현(2006) 자기부상열차
UTM01
의 궤도 형상에 따른 동특성 해석,
2006한국철도학
회 추계학술발표회 특별세미나 특별세션, 한국철도학회, pp.
219-227.
송명관, 김경호(2005) 초고속 자기부상열차-가이드웨이 상호작용을 고려한 가이드웨이 구조물의 동적해석시스템 개발, 대한토목 학회논문집, 대한토목학회, 제25권 제5A호, pp. 823-835.
한형석, 임봉혁, 이남진, 문석준, 정정훈(2007) 전자석 현가 시스 템의 부상 공극 주파수 응답 해석,
2007년도 한국철도학회 추계학술발표회, 한국철도학회, pp. 912-917.
Cai, Y., Chen, S.S., Rote, D.M., and Coffey, H.T. (1994) Vehicle/
guideway interaction for high speed vehicles on a flexible guide- way. J. of Sound and Vibration, Vol. 175, No. 5, pp. 625-646.
Fangling and control of the Magplane vehicle. Maglev2004, Shang- hai, China, pp. 935-941.
Hedrick J.K, Ravera R.J, and Anderes J.R. (1975) The effects of elevated guideway construction tolerances on vehicle ride quality.
J. of Dynamic Systems, Measurement and Control, ASME, Vol. 97, No. 4, pp. 408-416.
MATLAB (2004) Control System TOOLBOX, The Math Works Inc.
Morita, M., Iwaya, M., and Fujino, M. (2004) The characteristics of the levitation system of Linimo(HSST system), Maglev2004, Shanghai. pp. 525-532.
Sinha, P.K. (1987) Electromagnetic Suspension Dynamics & Con- trol, Peter Peregrinus, London, U.K.
Soong, T.T. (1990) Active Structural Control: Theory and Practice, Addison-Wesley.
Thornton R et al. (2004) MagneMotion Urban Maglev, US DOT.
Yang, Y.B. and Lin, B.H.(1995), Vehicle-bridge interaction analysis by dynamic condensation method, Journal of Structural Engi- neering, ASCE, Vol. 121, No. 11, pp. 1636-1643.
(
접수일: 2008.9.30/심사일: 2008.11.15/심사완료일: 2009.6.17)
그림
10.차량속도와 처짐비에 따른 교량
DMF의 변화
<
부 록
>전체 시스템의 운동방정식을 다시 쓰면 다음과 같으며, 전 형적인 관측기를 가지는 상태방정식의 형태를 가진다.
(19)
본 논문에서는 자기부상열차와 교량간 연동되는 상호작용 해석시 모우드 중첩법을 적용했으므로 고려된 교량의 모우드를
n이라고 가정했을시에 식 (19)를 구성하는 부행렬들은 다음 과 같이된다.
여기서, 0은 영행렬을 뜻하며, I는 단위행렬을 뜻하고, 아래 첨자 i×j은 i행과 j열로 구성된 행렬을 의미한다. 이외의 부 행렬들의 정의는 다음과 같다.
(A.1)
(A.2)
(A.3)
(A.4)
(A.5)
(A.6)
(A.7)
(A.8)
(A.9)
(A.10)
(A.11)
(A.12)
(A.13)
(A.14)
여기서, f는 관측기에 입력되는 백색잡음(white nose)으로써
fbg(x)는 부상공극센서의 잡음, 는 대차의 연직가속도센 서의 잡음으로서 해석시에는 0으로 두고 고려를 하지 않았다.
H= I(2n+5) (A.15)
G = [G1 G2 G3 G4 G5] (A.16)
여기서, G는 제어기의 제어게인(control gain)으로서 상수값을 지니며 본 예제의 경우 다음과 같은 값을 사용하였다.
G = [-0.0094 -2.5512 -0.0016 -0.0067 0.0012]×106
(A.17)
여기서, L은 관측기의 관측게인(control gain)으로서 상수값 을 지닌다. 해석에 사용된 관측기의 값은 다음과 같다.
L11=L12=L13=L21=L22=L23= 0
L14=143, L24=3160, L15=1145, L52=33675
(A.18)
E=A0
−B
0G−LC0 (A.19)여기서, C
0는 다음과 같다.
(A.13) x· t
( )
xˆ t
( )
⎩ ⎭
⎨ ⎬
⎧ ⎫
A –BG LC Ex· t
( )
xˆ t( )
⎩ ⎭
⎨ ⎬
⎧ ⎫ H 0
0 Lw t
( )
f t( )
⎩ ⎭
⎨ ⎬
⎧ ⎫
+=
A
0n n× In 0n 2× 0n 2× 0n 1× A21 A22 A23 0n 2× A25 02 n× 0n n× I2 02 2× 02 1×
A41 A42 A43 A44 A45
01 n× 01 n× 01 2× A54 A44 (2n 5+ ) 2n 5×( + )
=
A22
ω
12– 0
0 –
ω
n2n n×= …
A22
2ξω1
– 0
0 –2
ξω
nn n×
= …
A23
0 2
mL ---kz
φ
1( )
x –0 2
mL ---kz
φ
n( )
x –= … …
A25
ki
φ
1( )
x –ki
φ
n( )
x –= …
A41 0
…
0ω
12
φ
1( ) V
x 2φ
1″
( )
x(
–) … ω
n2
φ
n( ) V
x 2φ
n″
( )
x(
–)
=
A42 0
…
02
ξω
1φ
1( ) Vφ
x 1′
( )
x(
–) … 2 ξω
nφ
n( ) Vφ
x n′
( )
x(
–)
=
A43 ks mc ---
– ks
mb ---
– kz
mb --- – ks
mb --- kz
mb ---
φ
j2
( )
xj 1= n
∑
+
=
A44 cs mc ---
– cs
mb ---
– 0
cs mb --- 0
=
A45
ki mb --- ki mb ---
– ki
φ
12
( )
xj=1
∑
n–
=
A54 0kz ki
= ----
A55 R L0 --- –
=
B
0(2n 4+ ) 5× 1
L0 --- 1
L0 --- 1
L0 --- 1
L0 --- 1
L0 ---
=
C
01 2n× 0 1 0 0 0 01 2n× ks
mb ---kz
mb ---cs
mb --- 0 ki
mb --- –
=
f
fbg
( )
x fb··( )
x⎩ ⎭
⎨ ⎬
⎧ ⎫
=
fb··
( )
xL L11L12L13L14L15 L21L22L23L24L25
T
=
w 01 n× 2 mL
---
φ
1( )F
x m02 mL
---
φ
n( )F
x m0 0 0 0=
2Fm0 mL ---
φ
j2j=1 n
∑ ( ) z··
x + r( )
x⎝ ⎠
⎜ ⎟
⎛ ⎞
0
T
–
C0
0 1 0 0 0 ks
mb ---kz
mb ---cs
mb --- 0 ki
mb --- –
=