70
New Paradigm for Aviation Training and Education:
Perspective of Intelligent Training System
Younghak Yoo, Ph.D.
Aviation Management & Training Systems LLC, Orlando, Florida, USA
The purpose of this paper is to introduce a perspective about intelligent training system as an approach to not only enhance aviation operators but also solve aviation safety problem. Review of related literatures about mechanisms of skill failure, learning, and forgetting leads our research efforts to choose cognitive architectures as modeling tools for human performance. Cognitive models can provide an advanced understanding of how humans learn the knowledge and skills, based on cognitive theories. Particularly, cognitive models based on a cognitive architecture can summarize behavioral characteristics, such as regularities of errors (how humans make sequential errors), learning mechanisms, and forgetting as well.
Taxonomy of cognitive architectures and successful case studies with different knowledge representations are briefly summarized to help understand the perspective and relevancy of cognitive architectures in aviation. It is concluded that these architecture-based models can inform us information about the various training strategies and achieve training efficiency-e.g., how and when to train (or retrain) workforce in an attempt to achieve skilled performance within limited training resources of cost and time.
Key words: Aviation training effectiveness, Cognitive architecture, Aviation safety, Intelligent training system
Received: November 21, 2013, Accepted: December 8, 2013 Correspondence: Younghak Yoo, Aviation Management & Training Sys-
tems LLC, Orlando, Florida, USA Tel: 1-321-262-1935
E-mail: [email protected]
I. INTRODUCTION
The goal of training and education is to attain knowledge and skills effectively for the operational safety within limited resources.
Enormous resources have been being invested for aviation training and system developments to help operators acquire wide range of procedural skills to achieve that goal. However, still nearly 60%
of commercial aviation occurring between 1990 and 2002 in the USA were associated with skill-based errors, and majority of human causal factors involves aircrew and their environments (i.e., unsafe acts of operators and preconditions for unsafe acts) [1]. Such data imply that the greatest increments in safety can be gained by improving human performance.
An intelligent training system (ITS), we propose to improve performance, is supposed to help pilots and other operators in complex systems not only to learn but also to lead to improved
retention of skills. Some researchers have tried to use computational cognitive models in implementing an ITS. Cognitive models can provide an advanced understanding of how humans learn the knowledge and skills, based on cognitive theories. Particularly, cognitive models based on a cognitive architecture can summarize behavioral characteristics, such as regularities of errors (how humans make sequential errors), learning mechanisms, and forgetting as well. Thus, these architecture-based models can provide information about the various training strategies−e.g., how and when to train (or retrain) workforce in an attempt to achieve skilled performance within limited training resources of cost and time.
II. MATERIALS AND METHODS 1. Mechanisms of skill failure and poor performance
There are multiple routes to skill failure and poor performance [2]. One common cause among them is high-pressure situation.
Two different theories have been proposed to explain why high- pressure situations harm operator’s performance [3]. According to distraction theories, high-pressure situations divert individuals’
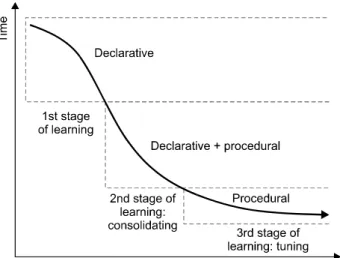
Fig. 1. A theory of learning in the three stages, which is based on the theory of Fitts (1964). Adapted from Anderson (1982), Rasmussen (1986), Van Lehn (1996), and Kim, Ritter, and Koubek, (2013).
attention to task-irrelevant thoughts, such as worries about the situation and its consequences. Pressure essentially creates a dual-task environment in which situation-related worries compete with the attention needed to execute the task at hand. On the other hand, explicit monitoring or skill-focus theories suggest that pressure increases self-consciousness about performing correctly, which in turn leads performers to focus their attention on skill execution to ensure an optimal outcome. Explicit attention to step-by-step processes is thought to disrupt the learning and execution of proceduralized processes that normally run outside of conscious awareness [Beilock, Bertenthal, McCoy, and Carr, 2004;
3,4]. However, not everyone fails under what might be considered high-pressure situation.
Such situation-induced performance decrements occur across a variety of skill domains under a diverse set of situations. However, there is other evidence that procedural skills are more prone to decay as explained in explicit attention theories. Considering that aviation is a highly procedural domain, and that tasks in aviation require extensive cognitive processing, we believe that under- standing mechanism of learning and forgetting different types of knowledge and skills is a basic, yet, fundamental approach toward the goal of improving operators’ performance.
2. Mechanisms of learning and forgetting
1) Learning
Chu and colleagues identified three types of knowledge needed by operators of complex dynamic systems (e.g., commercial air- planes, air traffic control, nuclear power plants,): declarative know- ledge, procedural knowledge, and operational skill [5]. Declarative knowledge is the fundamental, factual knowledge about the system, its components, controls, and functions. Procedural know- ledge is the rule-based knowledge (e.g., if-then) about how to operate the system and to perform specific tasks. Kieras described procedural knowledge as how-to-do-it knowledge because it describes human behavior aspects of performance with goals, operators, methods, and selection rules [6]. Procedural tasks include several decision-making points as cognitive tasks and can be viewed as an ordered sequence of steps or operations (e.g., emergency procedures) [7]. Operational skill is the ability to integrate declarative and procedural knowledge in a multi-task, time-constrained environment. Operational skill also includes the ability to recognize when activities are required and how to coordinate them to meet the demands of real-time operations.
Until operational skill is attained, skill acquisition is generally characterized as going through three levels of learning stages: a
cognitive stage, an associative stage and an autonomous stage [8].
Based on this Fitts’ classification, Anderson, a renowned cognitive psychologist, developed a theory of cognitive skill acquisition [9].
According to Anderson, three stages move from a cognitive stage, characterized as conscious, slow, and error-prone, to an autono- mous stage, characterized fast and error-free, with repeated practice. In the autonomous stage, knowledge is compiled and proceduralized. Therefore, knowledge retrieval is unconscious, fast, and free of error. By Anderson’s theory, a professional pilot, for example, who can maneuver a complicated commercial plane has acquired operational skill, so the pilot is capable of unconsciously performing his or her skill at the autonomous level with compiled and proceduralized declarative and procedural knowledge.
Fig. 1 provides consensual and overarching view on under- standing of learning in terms of time and repeated practice between knowledge types and three stages of learning [9-12].
During the first stage, the cognitive stage, knowledge is declarative and task completion time decrease with practice. During the second, the associative stage, part of the knowledge is declarative and another part is compiled to be procedural, and learning still occurs fast but rate starts to decrease. Finally, during the third, the autonomous stage, procedural knowledge is compiled but learning rate and decrement in task completion time slow down.
2) Forgetting
As shown in Fig. 1, practice brings improvement and more practice brings more improvement until some point. However,
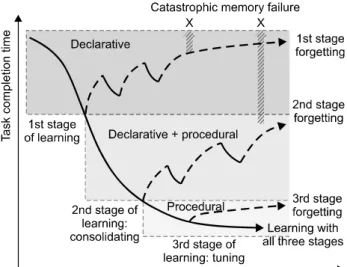
Fig. 2. The KRK Theory of Skill Learning and Retention. X’s represent catastrophic memory failure. Adapted from Kim, Ritter, and Koubek.
disuse or infrequent use of knowledge and skills can incur for- getting of knowledge and skill, and forgetting can subsequently result in discrepancies in operator performance between expected level during normal time and performed level during emergent time, or in high-pressure situations (Kim, Ritter, & Koubek, 2013).
Kim, Ritter, and Koubek (2013) found that forgetting and retention varied across the three stages of learning in their D2P (Declarative to Procedural) experiment [12,13]. In Fig. 2, memory failures in different stages of learning is shown. For the first stage of learning and forgetting, knowledge in declarative memory degrades with lack of use, perhaps catastrophically as indicated by the X’s in Fig. 2, leading to the inability to retrieve the memory and thus to perform the task. Decreased memory strength leads to increased response times and decreased retention and perfor- mance accuracy. In the second stage of learning, practice compiles declarative knowledge into procedural knowledge, and task knowledge is represented using a mix of declarative and procedural memory. With lack of use, the declarative knowledge is forgotten, leading to mistakes and missed steps. Proceduralized memory, on the other hand, is basically immune to decay.
Enormous resources are invested to train aviators for commercial as well as military aviation. When, however, it comes to efficacy of training, most training regimens neglect how acquired know- ledge skills are retained and should be maintained for a long time.
Aviation is a highly procedural domain, so it involves a variety of tasks that require operators to maintain a variety of procedural skills (e.g., ATC, emergency procedures) for situational readiness.
Theories of learning and forgetting shed light on the relation of decreased human performance to decay of procedural knowledge and skills in aviation; retention strategies through procedura- lization of declarative knowledge may help not only facilitate learning but also improve retention of knowledge and skills, and consequently operators’ performance.
There has been a long history of research in cognitive psy- chology that studies human skill acquisition in a variety of contexts. Unfortunately, there is still a gap between laboratory research in cognitive psychology and many real-world concerns on training, such as how to derive the most effective set of instruc- tions, how to facilitate knowledge acquisition in various stages of training, or how to maintain the same level of performance over time in different problems or situations [14]. To overarch the gap, various components in human cognition have to be integrated because such integration is essential for many real-world applica- tions. Real-world problems occur through multiple routes. Newell proposed the concept of a cognitive architecture as a solution to the issue of integration [15].
3. Cognitive architecture
Cognitive architectures denote comprehensive, domain-generic computational cognitive models, capturing and integrating the essential structures, mechanisms, and processes of cognition such as perception, attention, categorization, and memory, based on cognitive theories. Programmers can build cognitive models, based on the architecture to produce coherent human behavior in different real-world tasks (e.g., ATC, taxiing, driving, etc.). They are more than just simulation tools or programming languages of some sorts. Cognitive architectures are broad theories of cognition.
Integrated models of cognitive systems can be contrasted with single-focus models (traditional approach) of cognitive functions such as control of eye movements, visual attention, categorization, decision making, or memory. Such single focus models are necessary but not sufficient for understanding human cognition [16]. Given the complexity of human mind, and its manifestation in behavioral flexibility, complex process-based theories, that is, computational models, are necessary to explicate the intricate details of the human mind [17]. Cognitive architectures are distinct from engineering approaches to artificial intelligence (AI) [18]. While, the engineering approaches to AI strive to construct intelligent computer systems by whatever technologies best serve that purpose, cognitive architectures are designed to simulate human intelligence in a humanlike way.
4. What can users do with cognitive architectures?
The utility and the value of cognitive [17]. Second, since cogni- tive architectures are integrated theories of cognition and simulate human intelligence, they can be a theoretical basis for the develop- ment of ITS. The key idea is that training materials can be designed with reference to a cognitive model of competence that the trainee is being asked to learn [14]. In other words, the cognitive model should incorporate the underlying skills that allow the model to perform the task the trainee is expected to perform.
Based on the model, the system can monitor actions of the trainee and infer the intentions of the trainee by mapping actions of the trainee to components of the model. In other words, a model of competence provides an explanation of actions as trainees interact with the system. Immediate feedback or real-time instructions can then be given to the trainee to facilitate the effectiveness of learning.
5. Taxonomy of cognitive architecture by know- ledge representation
Two key design properties that underlie the development of any cognitive architecture are memory and learning. Various types of memory serve as a repository for background knowledge about the world and oneself, about the current episode of activity, while learning is the main process that shapes this knowledge. Orga- nization of memory depends on the knowledge representation schemes. A simple taxonomy of cognitive architectures based on these two main features leads to a division of different approaches into three main groups: symbolic, sub-symbolic, and hybrid models [19].
Symbolic architectures focus on information processing using high-level symbols, in a top-down approach (e.g., AI), so symbolic representations are performed in a sequential manner. High level symbols denote declarative knowledge, facts such as numbers and names. Symbolic architectures can perform high-level cognitive functions, such as planning and deliberative reasoning, in a way that resembles human expertise. Symbolic representation of human cognition can be understood as the function of the computer:
input, process, and output. However, the major issues in symbolic approach are the formulation of symbolic entities from low-level information, as well as the handling of large amount of infor- mation and uncertainty.
Sub-symbolic or connectionist architectures can be thought of as a neuron and use low-level activation signals flowing through
a network consisting of numerous processing units, a bottom-up process relaying on the emergent self-organizing and associative properties. Sub-symbolic architectures are better suited for cap- turing the context-specificity of human performance and handling many pieces of low-level information simultaneously. Therefore, sub-symbolic architectures can be thought of as an autonomous learning system, and this is one of its strengths [20]. Yet their main shortcoming is the difficulty in realizing higher-order cognitive functions.
While there is a dichotomy between two knowledge represen- tation approaches, Kelley viewed two approaches as a single continuum of human cognition [20]. This idea justifies hybrid architectures that represent an integration of symbolic and sub- symbolic paradigms. The potential benefit of a combined approach with hybrid architectures is therefore to have each method address the limitations of the other, allowing creation of a complete brain architecture that covers all levels of processing, from stimuli to higher-level cognition. Hybrid architectures such as SOAR and ACT-R are symbolic, production system architecture, capable of low-level representations of memory structures. Its validity is shown in many studies.
6. Relevance of cognitive architecture to aviation
The major relevance is that aviation is a highly procedural domain in tasks, and the tasks in aviation are interwoven between multiple cognitive processing. Cognitive architectures, integrated theories of cognition, can provide strategies for training and edu- cation in connection with ITS. Besides domain issue, there are two other relevant areas of cognitive architectures in aviation: (1) designing an operation sequence or an interface and (2) populating simulated task environments [18]. As to design purposes, behavior sequences of operators of a task (e.g., landing an airplane or air traffic control) can be compared with the sequences produced by an actual pilot or an actual ATC controller. If a task is to design an interface, these behavior sequences may also provide insight into alternate ways to perform a task and could provide new strategies for the interface design.
Another application for high-fidelity cognitive models is popu- lating simulated worlds or situations. For example, training a fighter-jet pilot is expensive, even in a simulator, because that trainee needs to face realistic opposition. In typical simulator training environments, realistic opposition consists of other in- structor pilots, so training one student pilot requires taking several expert pilots away from their normal duties (i.e., flying airplanes on real missions). Bringing them to the training has implication
for readiness and is costly. If, however, the other pilots could be simulated realistically, then the trainee could face opposition without interfering with their duties. Similar training situations can be found in commercial aviation, medical, or any complex systems, where the only way to train someone is to involve multiple human experts who must give up their regular jobs. However, the need for expensive experts can potentially be eliminated (or at least reduced) by using architecturally-based cognitive models in place of the human experts and provide cost effectiveness to training [18]. There have been many researches that tried to develop ITS across diverse domains for the past two decades. We review two successful cases that used hybrid knowledge representation such as SOAR and ACT-R (Adaptive Control of Thought-Rational).
III. DISCUSSION
1. Case studies of cognitive architectures in aviation
1) TACAIR-SOAR
Since General Problem Solver, one of the earliest proto-archi- tecture, set the functional standard of intelligent systems, one successful example of cognitive architecture was TACAIR-SOAR [21]. TACAIR-SOAR is a model of fighter pilot and was built using the SOAR cognitive architecture, symbolic and rule-based system. TACAIR-SOAR is embedded within real-time large-scale simulations of a battlefield. The architecture demonstrated two innovations: the integration of a number of capabilities that support autonomous, intelligent behavior in a real-time, complex domain; integration into the military operational organizational structure so that existing methods and systems could be used for specifying missions, interacting with the aircraft in flight during mission execution, and reporting after mission.
At the start of the simulated mission it is briefed, and it can autonomously accomplish its goals, perform a wide variety of missions, and communicate with control and other pilots using natural (albeit restricted) language. The system was successfully used in a large-scale Synthetic Theatre of War simulation, involving 3,700 computer-controlled vehicles.
SOAR supports dynamic hierarchical decomposition of goals and execution of complex operators. This organization appears to correspond to the way human pilots organize their knowledge and provides readable traces of behavior (in terms of operator selections and decompositions). In TACAIR-SOAR, the operator hierarchy usually corresponds to the explicit goals and sub-goals of the
mission being executed.
As Pew and Mavor pointed out that to be realistic and effective for training, the behavior of TACAIR-SOAR pilots must corres- pond to the behavior of human pilots) [22]. Three principles were adopted to approximate human behavior without attempting to build a detailed model. The first principle is to develop synthetic pilots using SOAR that roughly corresponds to the human cognitive architecture. Abstraction was used to speed development and modeling decisions was made two to four times a second. This abstraction eliminates low-level eye and finger movements but retains the basic tactical decisions. Although the first principle is to give the system the same basic processing structure, the second principle is to give the system the same basic sensory and motor systems. The final principle is to give the pilots the same basic knowledge as human pilots. Synthetic pilots were built based only on the information extracted from subject matter experts.
The dimensions for evaluation are the cost and effectiveness of training. Although formal evaluation was possible, Jones et al.
observed the success of the system along two primary dimensions:
(1) improved realism of automated force behavior and (2) economy of expense in populating a synthetic environment with automated participants. In terms of improved realism, a number of active and retired military personnel expressed surprise and enthusiasm at the difference between TACAIR-SOAR’s behavior and other simulated entities. One active pilot who had finished a training exercise in a flight simulator, flying air-to-air engagements against TACAIR-SOAR agents, was pleased to note that the system actually reacted to his maneuvers, unlike the behavior of semi-automated forces. He claimed that it was the best simulation training experience he had ever had.
2) IMPRINT with ACT-R
Human performance modeling technique was to determine if the combination of a discrete event simulation tool and a cognitive modeling tool could be used to predict the SA of pilot’s during the use of a new cockpit system [23]. The Improved Performance Modeling Research Integration Tool (IMPRINT) was combined with the ACT-R hybrid cognitive architecture. Idea is that cockpit concepts can be assessed early in the design process while pro- viding a cost-effective complement to the traditional pilot-in-the- loop experiments and data collection techniques.
IMPRINT is a discrete event simulation tool that consists of a set of automated aids to assist analysts in conducting human performance analyses. ACT-R predicts what happens cognitively every few hundred milliseconds in performance of a task. As such, it is situated at a level of aggregation considerably above basic
brain processes but considerably below significant tasks like air-traffic control. The project chose an early prototype of the Aviation Weather Information (AWIN) system at the candidate cockpit system for assessment. AWIN is a hand-held tool that provides weather information to general aviation pilot to support strategic flight planning for hazardous weather avoidance. The project team created a sequence of weather cues based on data from one of flight paths in order to provide a scenario for the model.
The hybrid architecture ACT-R dynamically simulated the activation levels of each chunk determined by sub-symbolic processes such as memory decay, cue priming and rehearsal over the course of the scenario. The results confirmed that the ACT-R hybrid cognitive model performs the same task as the human pilots and makes predictions that can be matched directly with human data (e.g., latency response, probability recall, magnitude and distribution of positional error, etc.). Thus, observable performance and situation awareness are a function of the same underlying cognitive and perceptual mechanisms. One assumption was made that the same cognitive model can also make workload predictions and thus capture possible SA-workload tradeoffs, for more information presented might improve SA at the expense of a higher workload [24]. Keller made a conclusion that the ability to create model-based predictions of SA has a wide range of benefits not only within the cockpit system development com- munity but for the development of any system designed to provide information to human operators in high workload or risk environ- ments [23].
IV. CONCLUSION
Tasks that were traditionally manual control and physical in nature are being replaced with tasks that are cognitive in nature.
It is not surprising to see modeling human cognition becoming increasingly important as system designers develop automation to support human operators.
In order to improve operational safety in this cognitive environ- ment, operators’ performance has to be improved in terms of cognition. Therefore, new training concept is introduced as Intel- ligent Training System, which adopts human cognitive architecture to implement integrated human cognitive processing. Learning and forgetting theories suggest that retention of knowledge and skills might be a good predictor of improvement of performance. History of cognitive architectures and their real-life applications validate working capacity and potential success of ITS in aviation.
Application of cognitive modeling is not limited to aviation domain. Surface transportation as well as air transportation is also increasingly adopting automation in adaptive cruise control, autonomous cruise control and vehicle guidance replacing manual control requirements with an increased need to monitor the automobile’s performance [25,26]. Other applicable fields that can benefit from modeling human cognition are nuclear power plant design, medical system design and operation, unmanned aerial vehicles and other telerobotic operations and manufacturing systems [26-29].
The purpose of this study, in part, is to introduce and educate the concept of cognitive architecture and its application in aviation.
One major advantage of cognitive architecture is their evolution and merging into each other to improve their shortcomings. In the next paper, we will provide more in-depth analysis of SOAR and ACT-R architectures and challenges and limitations for further success of ITS in aviation training and education.
REFERENCES
1. Shappell S, Detwiler C, Holcomb K, Hackworth C, Boquet A, Wiegmann DA. Human error and commercial aviation accidents:
an analysis using the human factors analysis and classification system:
Human Factors. Hum Factors 2007;49(2):227-242.
2. DeCaro MS, Thomas RD, Albert NB, Beilock SL. Choking under pressure: Multiple routes to skill failure. J Exp Psychol Gen 2011;140(3):390-406.
3. Beilock SL and Carr TH. On the fragility of skilled performance:
What governs choking under pressure? J Exp Psychol Gen 2001;130:
701-725.
4. Masters RW. Knowledge, nerves and know-how: The role of explicit versus implicit knowledge in the breakdown of a complex motor skill under pressure. British J Psychol 1992;83:343-358.
5. Chu RW, Mitchell CM, Jones PM. Using the operator function model and OFMspert as the basis for an intelligent tutoring system:
Towards a tutor/aid paradigm for operators of supervisory control systems.
IEEE-SMC, IEEE Transactions on. 1995;25(7):1054-1075.
6. Kieras DE. A guide to GOMS model usability evaluating using NGOMSL. In: Helander MG, Landauer TK, Prabhu PV, eds. Hand- book of humancomputer interaction. 2nd ed. Amsterdam: North-Holland, 1997:733-766.
7. Konoske PJ and Ellis JA. Cognitive factors in learning and retention of procedural tasks. In: Dillon RF, Pellegrino JW, eds. Instruction:
Theoretical and applied perspectives. New York: Praeger, 1991:47-70.
8. Fitts PM. Perceptual-motor skill learning. In: Melton AW, ed. Categories of human learning. New York: Academic Press, 1964:243-285.
9. Anderson JR. Acquisition of cognitive skill. Psychol Review 1982;89:
369-406.
10. Rasmussen J. Information processing and human-machine interaction:
an approach to cognitive engineering. New York: Elsevier, 1986:125-
129.
11. Van Lehn K. Cognitive skill acquisition. Ann Review Psychol 1996;
47:513-539.
12. Kim JW, Ritter FE, Koubek J. An integrated theory for improved skill acquisition and retention in the three stages of learning. TIES 2013;14(1):22-37.
13. Ritter FE, Morgan Y, Cohen KC, Weyhrauch MA, Kim JW, Hobbs JN. Declarative To Procedural (D2P) Manual. In: Kennedy B, Reitter D, Amant R, eds. Proceedings of the 2nd Annual Conference on Behavior Representation in Modeling and Simulation. Ottawa, Canada: BRIMS Society, 2013;23.
14. Fu WT, Bothell D, Douglass S, Haimson C, Sohn MH, Anderson J. Toward a real-time model-based training system. Interac- ting with Computers 2006;18(6):1215-1241.
15. Newell A. You can’t play 20 questions with nature and win: projective comments on the papers of this symposium. In: Chase WG, ed. Visual information processing. New York: Academic Press, 1973;283-308.
16. Gray WD. Integrated models of cognitive systems. In: AFOSR Cognitive Modeling Workshop, Mar, 2005, Saratoga Inn, Saratoga Springs, NY, USA; London: Oxford University Press, 2007;45-46.
17. Sun R. Introduction to computational cognitive modeling. In: Cambridge handbook of computational psychology, London: Cambridge University Press, 2008;3-19.
18. Byrne MD. Cognitive architecture. In: The human-computer interaction handbook: Fundamentals, evolving technologies and emerging applications.
Chicago: Linton Press, 2003;97-117.
19. Duch W, Oentaryo RJ, Pasquier M. Cognitive Architectures:
Where do we go from here? FAIA 2008;111-122.
20. Kelley TD. Symbolic and sub-symbolic representations in computational models of human cognition what can be learned from biology? Theory
& Psychology 2003;13(6):847-860.
21. Jones RM, Laird JE, Nielsen PE, Coulter KJ, Kenny P, Koss FV. Automated Intelligent Pilots for Combat Flight Simulation. AI Magazine 1999;20(1):27.
22. Pew RW and Mavor AS. Modeling Human and Organizational Behavior: Applications to Military Simulations. Washington, D.C.:
National Academy Press, 1998;78-82.
23. Keller J, Lebiere C, Shay CR, Latorella K. Cockpit system situational awareness modeling tool. Current Research and Trends HPSAA II 2004;1:66.
24. Lebiere C. A theory-based model of cognitive workload and its appli- cations. Proceedings of the 2001 Interservice/Industry Training, Simula- tion and Education Conference (I/ITSEC 2001). Arlington, VA:
NDIA, 2001;32.
25. Seppelt BJ and Lee JD. Making adaptive cruise control (ACC) limits visible. Int J Human-Computer Studies 2007;65:192-205.
26. Sheridan TB. Telerobotics, automation, and human supervisory control.
MIT Press: Cambridge. In the 2nd International Conference on Applied Human Factors and Ergonomics, July 14-17 2008, Las Vegas: NV, 1992.
27. Boring RL, Dudenhoeffer DD, Hallbert BP, Gore BF. Virtual power plant control room and crew modeling using MIDAS. Proceedings of the joint Halden reactor project and CSNI special experts’ group on human and organisational factors workshop on future control station designs and human performance issues in nuclear power plants. Halden, Norway, 2006;1-5.
28. NextGen. Concept of operations for the next generation air trans- portation system, Version 2. Joint Planning and Development Office, Washington, DC: JPDO, 2007.
29. Sheridan TB and Ferrell WR. Man-machine systems. Cambridge, MIT Press, 1974.
=국문초록=
이 논문의 목적은 조종사를 비롯한 항공 종사자들의 훈련을 효율적으로 실행할 수 있는 방안을 도출하는데 있다. 그 한 방법으로서 지능적 훈련 시스템 개발에 대해 소개하고, 그 실행 방안으로 인지구조의 개념을 훈련과 시스템의 일부로 채택할 것을 제안한다. 이러한 제안의 배경에 대한 이유로는 첫째, 시스템 자동화되어 조종사와 관제사의 업무 부하가 줄어듦에도 불구하고 사람의 생명을 위협하는 항공 사고가 줄어 들지 않고 있으며, 더 심각한 이유는 그 사고들의 원인이 인적 자원들의 기술적 저하와 관련이 있다는 FAA 연구보고가 있다. 둘째, 항공 장비가 인식처리를 요하는 요소들로 업무 가 바뀌어가고 있음에도 훈련 과정에는 그에 상응하는 교육이론과 심리 이론이 결여되어 있다는 우려가 작용하고 있다.
따라서 미래의 항공훈련은 모의 훈련기기를 더욱 활용하여 시간과 비용을 절감할 뿐만 아니라, 동시에 모의 훈련기기에 인식 구조를 접합한 총체적 훈련 개념을 통해 피 훈련자의 서술적 기술을 절차적 기술로 향상시켜 기술적 지식을 장기간 유지 시키는 방법으로 훈련 효율성을 한 단계 더 향상시키는 것이 바람직한 방안이라고 보고 있다. 교육이론과 인식이론 을 통합한 지능적 훈련 시스템의 도입은 궁극적으로 훈련 초기, 즉 학교나 군대에서의 단계 뿐만 아니라 민간 항공사 조종사, 군 조종사, 항법사 및 관제사들의 업무능력 유지 능력에도 적용되어 기술 향상을 통해 안전의 수준을 향상시킬 수 있을 것이다. 논문의 후미에서, 이제까지 미국에서 인식구조 모델을 실행하여 성공한 두가지 다른 지식체계를 가진 두 인식구조의 사례를 각각 들어 이해를 더하고 결론에서는 항공분야 외에도 지상 교통 의료 부분에서의 적용 가능성을 검토하였다.
중심단어: 안전, 지능적 훈련 시스템, 인지구조, 항공훈련 효율성