Vol. 15, No. 2 pp. 1059-1065, 2014
신경망을 이용한 풍력 발전시스템의 피치제어
홍민호
1, 고승윤
1, 김호찬
2, 허종철
3, 강민제
1*1제주대학교 전자공학과, 2제주대학교 전기공학과, 3제주대학교 기계공학과
Pitch Angle Controller of Wind Turbine System Using Neural Network
Min-Ho Hong
1, Seung-Youn Ko
1, Ho-Chan Kim
2, Jong-Chul Hur
3and Min-Jae Kang
1*1Department of Electronic Engineering, Juju National University
2Department of Electrical Engineering, Juju National University
3Department of Mechanical Engineering, Juju National University
요 약 풍력발전시스템은 정격풍속미만에서는 토크를 제어하여 바람의 에너지를 최대로 하고 정격풍속이상에서는
피치를 제어하여 발전량을 정격으로 유지한다. 본 논문에서는 풍력발전시스템의 피치제어를 신경망을 이용하여 제어 하는 방안을 제시한다. 피치제어의 목적은 정격풍속 이상에서 발전기의 회전속도를 일정하게 제어하여, 결과적으로 발전기의 출력을 정격전력으로 유지한다. 이 논문에서는 신경망 피치제어기의 성능을 향상시키기 위하여 발전기의 정 격회전속도와 현재 회전속도 차이를 풍속과 함께 신경망의 입력으로 사용하는 방법을 제안하였다. 신경망의 훈련 알 고리즘은 오류역전파(error back-propagation) 방법이 사용되었고, Matlab/Simulink를 사용하여 제어가 원활하게 되는 것 을 확인하였다.
Abstract Wind turbine system can obtain the maximum wind energy using torque control under the rated wind speed, and wind turbine power is controlled as the rated power using pitch control over the rated wind speed.
In this paper, we present a method for wind turbine pitch controller using neural networks. The purpose of the pitch control is to control generator speed and power in the above rated wind speed. To improve the neural network pitch controller, the difference between a rated and current speed of generator has been used for another input of neural networks as well as wind speed. Error back-propagation algorithm is used for training the neural network pitch controller and simulation and Matlab/Simulink is used for verifying that this system is controlled well.
Key Words : Error back-propagation, Neural network controller, Pitch control, Wind turbine
「본 연구는 2009년도 지식경제부의 재원으로 한국에너지기술평가원(KETEP) 풍력특성화대학원 인력양성사업의 지원을 받 아 수행한 연구과제입니다.(NO.20094020200020)」
*Corresponding Author : Min-Jae Kang(Jeju National Univ.) Tel: +82-64-754-3666 email: minjk@jejunu.ac.kr
Received January 6, 2014 Revised February 4, 2014 Accepted February 5, 2014
1. 서론
인류의 문명은 에너지의 개발과 이용에 의하여 촉진되 고 지탱되었다고 해도 지나침이 없다. 인류는 원시시대 이래 불을 발견하여 이용함으로써 생활을 보다 편리하게
영위함과 동시에 많은 문화유산을 창조할 수 있었다. 하 지만 오늘날 전 세계적으로 화석연료의 사용량 급증으로 인한 환경문제가 많은 국가들의 관심사가 되었고 앞으로 도 계속 증가할 전망이다. IEA(국제에너지기구)의
“World Energy Outlook 2012“ 보고서의 향후 25년간의
에너지 전망에 따르면 2035년경의 세계 에너지 수요는 30%정도 증가할 것으로 예측하고 있으며 신재생에너지 는 전 세계 총 발전량의 1/3 이상을 담당하게 될 것으로 전망하고 있다[1].
에너지 소비량이 많은 우리나라 또한 친환경적인 새로 운 에너지원을 개발하기 위하여 많은 노력을 기울이고 있고 풍력은 이러한 신재생에너지 중에서도 가장 기대되 는 에너지원이다. 풍력 터빈(wind turbine)은 바람이 갖고 있는 에너지를 전기적 에너지로 변환하는 장치이다. 바람 이 가지고 있는 에너지는 풍속이 3승에 비례한다. 마찬가 지로 이 바람이 가지고 있는 에너지를 전기 에너지로 변 환하는 풍력 터빈의 출력은 풍속의 3승에 비례하여 커진 다. 하지만 고풍속 영역에서 풍속의 3승에 비례하는 출력 을 얻기 위해서는 풍력 터빈 발전기의 용량이 커져야 하 므로 그 무게도 엄청 늘어날 뿐만 아니라 비용이 효율적 이지 못하다[2].
풍력을 효율적으로 사용하기 위해서 다양한 설계방법 과 제어 방법들이 제시되고 있으며 제어방법에는 풍속에 따라 크게 두 가지로 나뉜다. 정격풍속보다 작은 풍속의 영역에서는 피치각(pitch angle)을 고정시키고 최대한 많 은 양의 바람에너지를 회수하기 위해 발전기 토크 (torque)를 제어하여 최적의 상태로 유지하고, 정격풍속 보다 큰 풍속의 영역에서는 피치각을 제어하여 로터의 회전속도와 발전기의 발전량을 각각 정격 회전속도, 정격 발전량이 되도록 유지해야 한다[3].
본 논문에서는 NREL에서 제공하는 5MW급 풍력 터 빈을 이용하여 정격풍속 이상에서의 출력을 제어하는 제 어기를 설계하였다. 정격풍속 이상의 영역에서 풍력 터빈 의 출력을 일정하게 유지하기 위하여 피치를 제어하는 제어기를 설계하였다. 제어기는 오류역전파 신경망(Error Back-Propa- gation Neural Network)을 사용하였으며, 이 를 Matlab/Simulink에서 구현하여 정격풍속이상에서 발 전기의 회전속도가 정격속도로 제어되고 있음을 확인하 였다.
2. 풍력 터빈 시스템모델
2.1 풍력 터빈
풍력 터빈시스템은 바람의 운동 에너지를 전기 에너지 로 변환시키는 장치이다. 여기서 풍력 터빈의 에너지원은 바람의 흐름으로 바람의 시간당 운동 에너지는 다음과 같다[4,5].
(1)여기서 는 공기밀도[],
는 블레이드(blade) 의 단면적[], 는 풍속[]이다. 본 논문에서 공기 밀도는 1.2231[]를 사용하였다. 위의
는 바람 의 운동에너지이고 이 바람이 풍력 터빈을 통과하면서 풍력 터빈의 로터(rotor)로 전달되는 에너지는 다음과 같 다.
(2)위의 식(2)의
는 전력계수라 하며, 와 의 두 변수를 가지는 비선형 함수로 는 주속비(TSR: tip speed ratio)라 하고 현재 불어오는 바람에 대한 블레이드 끝단 속력의 비이며 다음과 같이 표현된다.
(3)
여기서 은 로터의 각속도[]이고,
은 로터 의 반경[]을 의미한다. [deg는 블레이드의 피치각이 다. 또한 로터로 들어온 바람과
를 이용하여 구 한
[W]을 로터의 각속도 [rad/s]로 나누면 로터의 토크
(N)값을 다음과 같이 구할 수 있다.
(4)본 논문에서 동력전달 장치 모델은 2-mass 모델을 사 용하였으며 아래의 식(5)와 식(6)을 이용하여 발전기 회 전속도 [rad/s을 구할 수 있다[6].
(5)
(6)
여기서
는 동력 전달축의 비틀림 상수이고,
은 동력 전달축의 비틀림 댐핑 상수이다. 그리고
는 기어 박스(gear box)의 기어비이고, 는 각각 저속 회전축 (LSS)와 발전기측의 고속 회전축(HSS)의 각도를 의미한 다. 또한 는 저속 회전축과 고속 회전축의 각속도 를 의미하며,
은 3개의 블레이드, 허브 그리고 저속 회 전축(low speed shaft, LSS)의 효과를 모두 고려한 관성 질량(moment of inertia)이고,
는 발전기 회전축의 관성 질량을 의미한다.2.2 풍력 터빈 시스템의 제어기모델
Fig. 1은 풍력 터빈의 풍속에 대한 파워의 출력 곡선을 나타낸다. 이 그래프는 시동풍속인
과 종단풍속
사이에서만 풍력 터빈이 동작한다는 것을 보여준다.풍속이
이하에서는 운전비용에 대한 효율이 너무 적기 때문에 정지시키고
이상에서는 풍력터빈 시스 템의 안전을 위하여 정지시킨다.또한
과
사이에서 풍력 터빈의 작동 상태에 따라 위와 같이 3개의 영역으로 나뉘게 된다.[Fig. 1] Ideal power curve of wind turbine systems
영역-에서는 발전기의 정격 전력보다 낮은 부분으로 풍력 터빈으로 들어오는 바람을 최대한 많이 회수하도록 제어해주어야 한다. 그렇기 때문에 영역-에서의 그래프 는 바람의 3승에 비례하는 그래프가 보여 지며 이 영역에 서는 피치각을 0으로 고정시키고
의 값이 최대 가 될 수 있도록 주속비 를 일정한 값으로 유지시켜야 한다. 주속비 를 일정하게 유지시키기 위해서 제어기에 서 발전기 토크
[N]를 이용하여 제어하며 최대한 의 에너지를 얻을 수 있도록 풍력 터빈을 제어한다.영역-에서는 풍력 터빈의 출력을 정격출력으로 일 정하게 유지시켜야 한다. 이 영역에서는 바람에 따른 출 력이 발전기의 정격 출력을 넘어서기 때문에 발전기의 정격 출력 만큼 바람의 에너지를 받을 수 있도록 피치각
[deg]를 이용하여 제어하며 로터의 회전속도가 일정하 도록 한다.
영역-는 영역-과 영역-을 이어주는 부분으로 소 음문제도 해결하고 로터의 하중을 줄여주기 위하여 부드 럽게 넘어가도록 토크제어를 이용하여 제어한다[7,8].
본 논문에서는 정격풍속 이상에서 풍속의 변화에 따라 피치각 [deg]를 제어하여 발전기의 회전속도와 발전량 을 정격으로 유지하는 신경망 컨트롤러(Neural Network
3. 신경망을 이용한 피치제어
3.1 피치제어 신경망
본 논문에서 피치제어를 위해 오류역전파 신경망이 사 용되었다[9]. Fig. 2에서 보여주듯이 풍속과 발전기의 회 전속도 차이가 입력값으로 사용되고, 피치각의 변화가 출 력값으로 나타난다. 그리고 은닉층에는 5 개의 뉴론을 사 용하였다.
[Fig. 2] Structure of neaural network controller
오류역전파 신경망에서 학습하는 과정을 효율과 안정 적인 수렴을 위해 바이어스 뉴론이 입력단에 종종 사용 되는 데, 여기서도 -1의 값을 갖는 바이어스 뉴론이 입력 단에 사용되었다. 여기서
는 입력층의
번째 뉴론과 은닉층의
번째 뉴론을 연결하는 가중치를 나타내고 는 은닉층의
번째 뉴론이 뉴론이 하나 뿐인 출력층과 연결하는 가중치를 나타낸다.피치제어 신경망은 풍속의 변화와 현재 발전기의 회전 속도에 맞는 피치각의 변화을 찾아서 발전기가 안정적으 로 정격출력을 낼 수 있도록 한다. 신경망의 학습은 이런 조건을 만족할 수 있도록 뉴론들을 연결하는 가중치
와 의 값을 찾아야 한다. 이를 위해서 임의의 값으로 가중치 와 를 초기화하고 그 값을 통해 피치제어 신경망 출력의 오차를 계산하고 그 오차가 줄어들도록 가중치 와 를 수정한다. 오차가 줄어들도록 가중 치를 수정하는 식은 다음과 같다[10].
′ (7)
′
(8)
(9)
(10)
여기서 X(n)은 피치제어 신경망 입력들의 백터이고 Z(n)은 은닉층의 뉴론들의 출력 백터이다. 는 출력 값의 변환함수,
은 목표값, 은 은닉층의 변환함 수 나타낸다. 와 는 각각 은닉층 번째 뉴론의 입력값과 출력뉴론의 입력값을 나타낸다. 그리고 은 훈 련 사이즈, 는 훈련 비율을 나타낸다. 은닉층 뉴론의 변 환함수는 -1에서 1 사이의 값을 갖는 시그모이드 (sigmoid) 함수로 식(11)과 같고 출력뉴론의 변환함수는 식(12)와 같이 선형함수이다.
(11)
(12)
이와 같은 방법으로 전체적인 에러인 식(10)이 원하는 값 이하가 될 때 까지 가중치의 수정과정을 반복한다.
3.2 피치제어를 위해 제안된 알고리즘
앞 장에서 설명 했듯이 영역-에서는 풍력 터빈의 출력을 정격출력으로 일정하게 유지되어야 한다. 또한 풍 력 터빈의 하중을 줄이고 안전하게 동작하기 위하여 로 터의 회전속도 또한 정격 속도로 유지시켜야 한다.
입력을 현재 들어오는 풍속 하나로만 놓아서 제어를 할 경우에는 NNC의 훈련 에러는 훨씬 줄어든다. 하지만 이렇게 훈련된 가중치 값들을 NNC에 넣고 풍력 터빈에 적용시킨다면 정격풍속 이상에서의 피치각은 풍속에 비 례하여 나온다. 이 결과는 그저 들어오는 풍속에 대한 Loock-up table이 될 뿐이고 결국 로터의 회전속도는 일 정속도를 유지할 수 없게 된다.
본 논문에서 제안하는 알고리즘은 현재 들어오는 풍속 을 하나의 입력으로 받고 현재 발전기의 회전속도와 정 격 발전기 회전속도의 차이를 또 하나의 입력으로 받아 정격 발전기 회전속도보다 현재 발전기 회전속도가 높으 면 피치각을 증가시켜 발전기의 회전속도를 늦추고 정격 발전기 회전속도보다 현재 발전기 회전속도가 낮으면 피 치각을 감소시켜 발전기의 회전속도를 높인다. 이런 제어 알고리즘을 기반으로 신경망 모델을 훈련시키고 풍력 터 빈에 적용하여 제어하는 방식을 제안한다.
[Fig. 3] Block diagram of pitch controller system with NNC
Fig. 3은 정격풍속 이상에서 NNC을 이용한 피치제어 시스템의 블록다이어그램을 나타내며 이를 순차적으로 표현하면 아래와 같다.
I) 풍속
[m/s]가 풍력 터빈으로 들어가 현재 발전기 회전속도인 [rad/s]를 구한다.II) 풍속
[m/s]와 발전기 회전속도 [rad/s]가 NNC 의 입력으로 들어가고 NNC는 정격 발전기 회전속 도와 현재 발전기 회전속도의 차이를 계산하고 이 에 맞는 피치각 [deg]의 증감인 [deg]를 계산 하여 풍력 터빈으로 보낸다.III) 현재 풍속
[m/s]와 현재 피치각 [deg]에서 NNC로부터 받은 [deg]를 합한 [deg]를 가 지고 다시 [rad/s]를 구한다.IV) 위 과정을 계속 반복하며 정격발전기 회전속도와 현재 발전기 회전속도의 차이를 줄이도록 풍력 터 빈의 피치각을 제어한다.
3.3 신경망 훈련요소
앞 절에서 제시한 알고리즘을 따라 NNC를 훈련시켜 야 하는데 NNC의 훈련을 위하여 고려해야할 요소들은 첫째 전체 훈련 개수, 둘째 풍속의 범위, 셋째 발전기 회 전속도 차이의 범위 그리고 넷째 피치각의 변화 정도이다.
[Table 1] Inputs and desired output of NNC Input1 Input2 Reference Input1 Input2 Reference
11 -20 1 17 -7 1
11 -15 1 17 -6 1
11 -5 0.7 17 -3 0.7
11 -2 0.1 17 -2 0.1
11 0 0 17 0 0
11 2 -0.1 17 2 -0.1
11 5 -0.7 17 3 -0.7
11 15 -1 17 6 -1
11 20 -1 17 7 -1
13 -15 1 19 -6 1
13 -10 1 19 -5 1
13 -4 0.7 19 -2 0.7
13 -2 0.1 19 -1 0.1
13 0 0 19 0 0
13 2 -0.1 19 1 -0.1
13 4 -0.7 19 2 -0.7
13 10 -1 19 5 -1
13 15 -1 19 6 -1
15 -13 1 21 -5 1
15 -8 1 21 -4 1
15 -3 0.7 21 -2 0.7
15 -2 0.1 21 -1 0.1
15 0 0 21 0 0
15 2 -0.1 21 1 -0.1
15 3 -0.7 21 2 -0.7
15 8 -1 21 4 -1
15 13 -1 21 5 -1
전체 훈련 개수는 너무 적으면 그만큼 훈련오차가 줄 겠지만 훈련되지 않은 부분의 정확성이 줄어들게 되고 또 훈련 개수가 너무 많으면 훈련오차가 너무 커지기 때 문에 적당한 훈련개수를 정해야 한다. 풍속의 범위는 정 격풍속이 11.4[m/s]이므로 NNC의 입력풍속은 1[m/s]부 터 21[m/s]까지 정하였다. 그리고 정격 발전기 회전속도 와 현재 발전기 회전속도의 차이범위는 -20에서 +20사 이에서 결정하였다. 실험을 통해 다양한 범위를 적용해 보았고 이 정도의 범위가 적당함을 알게 되었다. 피치각 의 변화정도는 -1과 1 사이의 값을 가지도록 훈련시켰으 며 훈련풍속 중에도 저풍속일 때는 정격 발전기 회전속 도와 현재 발전기 회전속도의 차이에 따라 비교적 피치 각의 변화를 작게, 고풍속 에서는 피치각의 변화를 크게 하도록 훈련시켰다.
Table 1은 NNC훈련의 두 개의 Input과 하나의 Reference값을 보여준다. Input1은 풍속을 나타내고 Input2는 정격 발전기 회전속도에서 현재 발전기 회전속 도를 뻰 값이다. 만약 Table 1과같이 Input1을 11m/s부터 21m/s까지 6개의 풍속으로 잡고 각 풍속당 Reference를 9 개로 잡는다면 전체 훈련개수는 54개가 된다. 이때의 Reference는 각각 -1, -1, -0.7, -0.1, 0, 0.1, 0.7, 1, 1 로 고 정시키고 발전기 회전속도의 차이는 각 풍속마다 차이를 두고 훈련시켰다.
4. 시뮬레이션 및 결과
Fig. 4는 3.1에서 설명한 피치제어 신경망의 학습을 위 해 Matlab/Simulink에서 구현한 것이다. 부수적으로 학습 과정에서 실시간으로 전체에러가 변하는 모습을 보기 위 하여 Scope를 달았다.
[Fig. 4] Block diagram of Matlab/Simulink for error back-propagation algorithm
이렇게 구현된 시스템에서 학습하여 목표한 에러에 만 족하는 뉴론 연결 가중치들을 구하였다. 이렇게 하여 구
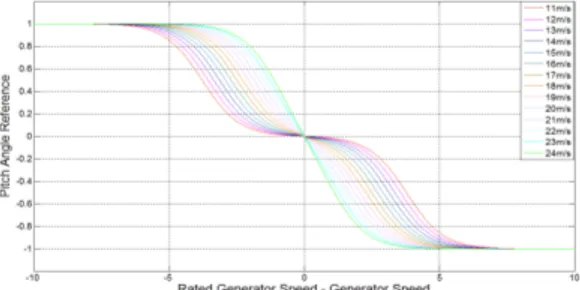
에서도 제대로 작동하는지를 알기 위하여 학습된 가중치 를 NNC에 넣고 테스트하였다. 풍속은 11[m/s]부터 24[m/s]까지 1[m/s]씩 증가하고 발전기 회전속도의 차이 는 -10에서 10까지 변하는 값을 입력으로 넣어서 실험하 였다. Fig. 5에서 보면 훈련되지 않은 풍속의 결과에도 문제가 없는 것을 알 수 있다.
[Fig. 5] Test outputs of NNC for untrained region
Fig. 4에서 학습된 NNC를 Fig. 3의 피치제어시스템에 적용하였으며, 이것을 Matlab/Simulink로 구현한 것이 Fig. 6에 나타나 있다.
[Fig. 6] Block diagram of Matlab/Simulink for wind turbine system with NNC
여기서 풍력 터빈의 모델은 NREL에서 제공하는 5MW급 풍력 터빈 Matlab/Simulink모델을 수정하여 사용 하였다[11]. 가장 왼쪽의 블록에서 풍속을 생성하여 보내 주면 이 풍속이 각각 NNC와 풍력 발전기로 들어가며 NNC에서는 첫 입력으로 들어온 풍속과 풍력 발전기에서 계산된 현재 발전기 회전속도가 NNC의 두 번째 입력으 로 들어가 피치각의 증감의 값을 계산하고 피치각을 제 어하여 발전기의 회전속도를 일정한 속도로 유지한다.
Fig. 7은 풍속을 일정하게 증가시키며 살펴본 결과이 다. 풍속은 계단함수 형식으로 12부터 1씩 25까지 증가하 는 형식을 입력으로 하여 발전량과 현재 발전기의 속도, 그리고 피치각의 변화를 나타내었다. 이 제어 시스템은 피치각의 증감을 이용하여 풍력발전기의 발전기 회전속 도가 정격풍속 이상에서도 일정하게 유지되도록 제어하 는 것을 목표로 하며 위의 그림을 보았을 때 풍속이 증가 하였을 때 발전기의 속도는 약간의 과도상태를 보이지만 결국 정격속도인 122.9[rad/s]가 되도록 제어 되는 것을
[Fig. 7] Simulation results of wind turbine with step wind speed
[Fig. 8] Simulation results of wind turbine with random wind speed
Fig. 8은 고풍속에서 200초마다 불규칙적으로 바뀌는 풍속을 입력으로 했을 때의 풍력 터빈의 출력, 현재 발전 기 회전속도, 피치각의 변화를 보여준다. 풍속의 변화가 급격할수록 발전기 회전속도의 오버슈트가 커지고 과도 상태의 시간이 길어지긴 하지만 곧 정격 발전기 회전속 도인 122.9[rad/s]로 제어되는 것을 볼 수 있다.
5. 결론
본 논문에서는 신경망을 이용하여 정격풍속이상에서 풍력 터빈의 피치각을 제어하여 정격회전속도와 출력을 제어하는 시스템을 제안하였다. 신경망은 오류역전파 신 경망을 사용하였으며 입력단에는 두 개의 입력과 한 개 의 바이어스, 은닉층에는 5개의 뉴론 그리고 출력은 피치 각의 변화를 나타내는 1개의 뉴론으로 구성하였다.
입력을 현재 들어오는 풍속 하나로만 놓아서 제어를 할 경우에는 정격풍속 이상에서의 피치각은 풍속에 비례 하여 나온다. 이 결과는 그저 들어오는 풍속에 대한 Loock-up table이 될 뿐이고 현재 풍력터빈의 회전속도상 태가 고려되지 않아서 로터의 회전속도는 제어되지 않는다.
본 논문에서 입력으로 풍속과 현재 발전기의 회전속도 와 정격 발전기 회전속도의 차이를 또 하나의 입력으로 받아서 피치각을 제어하는 시스템을 제안하였다. 이렇게 하여 훈련된 신경망 피치제어 기는 Fig. 7, Fig. 8과 같이 정격풍속이상에서 발전기 회전속도와 전력이 제어되는 것을 볼 수 있다. 다만 풍속이 변할 때 약간의 과도상태 가 생기는 것을 알 수 있으며 특히 12[m/s]~ 13[m/s]의 풍 속구간에서 오버슈트가 조금 큰 것은 앞으로 계속 개선 해 나가야할 연구과제로 생각한다.
References
[1] Internationl Energy Agency, World Energy Outlook, 2012. OECD/IEA, 2012.
[2] H.-C. Kim, A Study on the Control Algorithm Improvement for Small Wind Power Systems, Korea Electrical Engineering & Science Research Institute, 1998.
[3] J. G. Kim, Power Control of a MW Class Wind Turbine, Master Thesis, Kangwon National University, 2011.
[4] K.-N. Ko and J.-C. Hur, An Introduction to Wind Engineering, Munundang, 2007.
[5] T. Burton, D. Sharpe, N. Jenkins, and E. Bossanyi, Wind Energy Handbook, Wiley, 2001.
DOI: http://dx.doi.org/10.1002/0470846062
[6] J.-M. Ko, S.-Y. Yang, C.-J. Boo, H.-C. Kim, J.-C. Hur,
J.-H. Lee, M.-J. Kang, "Pitch angle control of wind turbine based on variable PID gains," Journal of Korean Institute of Intelligent Systems, vol. 23, no. pp. 1-6, 2013.
[7] E. Hau, Wind Turbines: Fundamentals, Technol ogies, Application and Economics, Springer, 2nd Edition, 2005.
[8] F. D. Bianchi, H. De Battista, R. J. Mantz, Wind Turbine Control Systems, Springer, 2007.
[9] A. S. Yilmaz and Z. Özer, "Pitch angle control in wind turbines above the rated wind speed by multi-layer perceptron and radial basis function neural networks,"
Expert Systems with Applications, vol. 36, pp.
9767-9775, 2009.
DOI: http://dx.doi.org/10.1016/j.eswa.2009.02.014 [10] J. M. Zurada, Introduction to Artificial Neural Systems,
PWS Publishing Company, 1992.
[11] J. Jonkman, S. Butterfield, W. Musial, and G. Scott.
Definition of a 5-MW Reference Wind Turbine for Offshore System Development. National Renewable Energy Laboratory, 2009.
DOI: http://dx.doi.org/10.2172/947422
홍 민 호
(Min-Ho Hong) [준회원]• 2011년 2월 : 제주대학교 전자공 학과 (공학사)
• 2011년 3월 ~ 현재 : 제주대학교 풍력 특성화 협동과정 (공학석사)
<관심분야>
풍력 발전 제어, 피치 제어
고 승 윤
(Seung-Youn Ko) [준회원]• 2013년 2월 : 제주대학교 전자공 학과 (공학사)
• 2013년 3월 ~ 현재 : 제주대학교 풍력 특성화 협동과정 (공학석사)
<관심분야>
풍력 발전 제어, 전기발전 제어
김 호 찬
(Ho-Chan Kim) [정회원]• 1989년 2월 : 서울대학교 제어계 측공학과 (공학석사)
• 1994년 2월 : 서울대학교 제어계 측공학과 (공학박사)
• 2008년 2월 ~ 2009년 2월 : 미 국펜스테이트 방문교수
• 1995년 9월 ~ 현재 : 제주대학교 전기공학과 교수
<관심분야>
신재생에너지, 풍력발전, 접지시스템 설계, 에너지효율
허 종 철
(Jong-Chul Huh) [정회원]• 1982년 2월 : 인하대학교 기계공 학과 (공학석사)
• 1992년 2월 : 인하대학교 기계공 학과 (공학박사)
• 1984년 3월 ~ 현재 : 제주대학교 기계공학과 교수
• 2009년 3월 ~ 현재 : 제주대학교 풍력특성화 대학원 인력양성 사 업단 단장
<관짐분야>
풍력 발전 시스템
강 민 제
(Min-Jae Kang) [정회원]• 1982년 2월 : 서울대학교 전기공 학과 (공학사)
• 1991년 2월 : 미국 루이빌대 전 기공학과 (공학박사)
• 2003년 2월 ~ 2004년 2월 : 미국 일리노이주립대학 방문교수
• 1992년 3월 ~ 현재 : 제주대학교 전자공학과 교수
<관심분야>
신경회로망, 접지시스템 설계, 풍력 발전 제어
![Fig. 3은 정격풍속 이상에서 NNC을 이용한 피치제어 시스템의 블록다이어그램을 나타내며 이를 순차적으로 표현하면 아래와 같다. I) 풍속 [m/s]가 풍력 터빈으로 들어가 현재 발전기 회전속도인 [rad/s]를 구한다](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5382200.204799/4.799.411.715.607.994/정격풍속-이상에서-피치제어-시스템의-블록다이어그램을-나타내며-순차적으로-회전속도인.webp)