지구과학에서 위치 및 자세 측정의 역할
임무택1)* · 박영수2)· 정현기2)· 신영홍2)· 임형래2)
The Role of Position and Attitude Measurement in Geoscience
Mutaek Lim*, Youngsue Park, Hyunkey Jung, Younghong Shin and Hyoungrea Rim (Received 22 June 2016; Final version Received 29 June 2016; Accepted 29 June 2016)
Abstract : Position data are important in many science and technology studies. In particular, when targets are on the earth, position data are critically important. If the properties of targets vary according to the vectorial and tensorial situations, we require both the azimuths of targets in vector and the attitude data in space. In this article, we address the meaning of the position, azimuth and attitude in geoscience, geoengineering and geotechnology, and how to measure and utilize them.
Key words : Position data, Azimuth data, Attitude data, Vector, Tensor
요 약 : 과학, 공학, 기술에서 목표가 되는 성질을 연구할 때, 보조 자료로서 위치 자료가 중요할 때가 많고, 지구를 대상으로 할 때는 결정적으로 중요하다. 그와 더불어 연구 목표가 되는 성질이 벡터, 텐서의 상황에 따라 그 값이 달라질 때는 그 성질이 벡터로서 가지는 방향, 공간에서의 자세에 관한 자료도 있어야 한다. 이 논문에서는 그러한 뜻에서 위치, 방위, 자세 등을 규정하고, 그것들을 측정하고 이용하는 방법들에 대해서 설명 한다.
주요어 : 위치 자료, 방위 자료, 자세 자료, 벡터, 텐서
1) 한국지질자원연구원, 광물 자원 개발을 위한 융합 연구단
2) 한국지질자원연구원, 광물자원연구본부
*Corresponding Author(임무택) E-mail; [email protected]
Address; Korea Institute of Geoscience and Mineral Resources (KIGAM)
서 론
과학이라고 하는 것은 어떤 측정을 통해서 얻은 자료를, 이미 알려진 원리 및 그와 관련된 자료 처리 과정을 통하여, 그 자료를 만들어내었을 원인을 찾아내고자 하는 것이다.
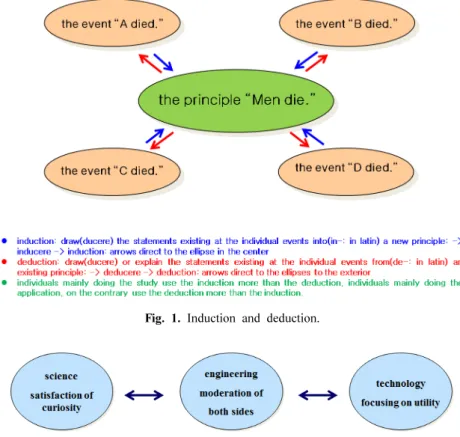
그러나 그 이미 알려진 원리를 맨 처음에 찾아낼 때에는, 여러 개별적인 관찰 결과들을 세밀히 고려하여, ‘왜 이런 관 찰 결과들을 얻게 되었을까’를 고려하는 과정 즉, 귀납적 연 구 방법 또는 증명 방법을 통했을 것이다.
일단 어떤 원리를 확립한 뒤에는, 어떤 개별적인 관찰 결 과를 얻었을 때, “그 관찰 결과는 이미 알려진 A 라는 원리 에 따라 생각하고 처리해 보면 그 원인은 다음과 같다”는 연 역적 연구 방법 또는 증명 방법을 통할 것이다.
만약 어떤 관찰 결과가 지금까지 알려진 원리대로 처리 했을 때 합리적인 원인을 찾아낼 수 없다면 그 합리적인 원
인을 설명할 수 있는 좀 더 수정한 원리 또는 새로운 원리를 가정하고 다시 해석하는 과정을 거치게 된다. 즉, 어떤 대상 을 두고 귀납적인 방법과 연역적인 방법을 동시에 쓰게 되 는 것이다. Fig. 1은 위와 같은 과정을 나타낸 그림이다.
한편, 기술은 그 원인이 무엇인가보다는 알고 있는 현상, 방법 또는 과정이 인간에게 주는 효용성을 인간이 더 중요 시하는 사실들의 무더기들을 뜻한다.
위와 같이 과학과 기술은 각각이 중요시하는 바가 매우 다른데, 이 다른 두 가지 사이에서, 예를 들면 특허 등을 통 하여, 둘 사이의 이해 관계를 조정함으로써, 둘 다에게 도움 을 주고자 하는 활동, 체계 등을 말한다. Fig. 2는 위와 같은 과학-공학-기술 사이의 관계를 보여준다.
인간이 바깥 세상을 이해 또는 판단함에는, 감각 기관이 느낀 것을 토대로 직접적으로 이해 또는 판단하는 것이 있 는데, 예를 들면 눈으로 보고 크다, 작다, 밝다, 어둡다 등을, 귀로 듣고 시끄럽다, 조용하다 등을 이해 또는 판단하는 것 등이 있다. 이러한 감각을 크게 5 가지의 감각(오감)이라고 말하는데, 그 감각 기관들은 정보를 많이 얻는 순서대로 줄 세우면 눈, 귀, 코, 혀, 피부이다. 인간이 발전해 옴에 따라, 위 5 가지 감각 기관만이 아니라, 다른 사람이 느낀 것, 다른 총 설
Fig. 1. Induction and deduction.
Fig. 2. Relation among science, engineering and technology, science and technology focus on different purposes, engineering does the moderation between the two.
사람이 이해한 것 등을 더 받아들이고, 이 모든 받아들인 것 을 종합적으로 처리하여 세상을 간접적으로 이해 또는 판 단하는 것이 있는데, 이를 마음이라는 기관이 담당한다고 말하는 사람들이 많고, 다른 말로 하면 이성적인 판단이라 고도 말할 수 있으며, 문명의 수준을 말할 때 이 이성적인 이 해 또는 판단의 수준을 기준으로 한다고 볼 수 있다.
이런 모든 이해 또는 판단을 위한, 관찰 또는 측정으로 얻 은 값들을 자료라고 부르고, 과학, 공학, 기술이 발달할수록 그 자료는 감각 기관 자체로가 아니라, 자, 저울, 시계 등 간 접적인 측정 수단으로 얻게 된다.
예를 들면 길이를 잴 때 인간은 눈만으로는 어떤 물건의 길이가 “몇 cm”라고 잴 수 없고, “A는 B보다 더 길다” 등으 로 잴 수 밖에 없는데, 이러한 측정을 상대 측정이라고 한다.
그러나 이러한 측정만으로는 여러 물건들의 길이를 정확하 게 재거나 서로의 크기 관계를 정확히 판단할 수 없다. 그래 서 예를 들면 한국표준과학연구원이 그것의 소급성을 보증 하는 자로 쟀을 때 “A의 길이는 몇 cm라”고 말할 수 있게 되 는데, 이것을 넓은 뜻에서는 절대 측정이라고 말할 수 있다.
그러나 측정학에서 말하는 절대 측정은 더 엄밀한 뜻으
로는 “단위 측정(들)의 대상이 기본 물리량(들)인 측정”을 말하고, 덜 엄밀한 뜻으로는 “측정한 값의 참값을 추정할 수 있는 경우의 측정”이라고 말한다(Korea Institute of Standards and Sciences, 2016. 06. 22., http://www.kriss.re.
kr/standard/view.do?pg=standard_define).
예를 들어 중력을 측정함에 있어서, 상대 중력계는, 절대 중력값을 이미 알고 있는 점(절대 중력점이라고 한다)에서 중력값을 재고, 다른 어떤 측정 지점에서 중력을 측정했을 때의 중력값이 절대 중력점보다 얼마 더 높다 또는 낮다는 것을 측정할 수 있는 기계인데, 절대 중력값에다가 그 차이 를 더하거나 빼면 결국 절대 중력값을 계산해 낼 수 있게 되 는 것이다.
그러나 절대 중력계는, 중력의 표현식인 아래의 식 (1)에서,
= 1/2 * g * t2 (1)
여기서, s = 길이(L), g = 중력 가속도, t = 시간(T)
s와 t를 측정하는데, 이 둘은 절대적으로 측정하는 기본 물리량이고, 따라서 g는 절대적으로 계산되므로 이 경우에
이것을 중력의 절대 측정이라고 부른다.
전 세계의 어디에 가든 누군가가 어디에선가 어떤 기계 론가 측정한 값을 똑같이 이용할 수 있기 위해서는 그 표준 이 통일되어 있어야 하며, 따라서 모든 과학, 공학, 기술에 서는 어떻게 측정하든 측정으로 얻은 값을 예를 들면 한국 에서는 한국표준과학연구원이 가지고 있는 소급성 기준을 통하여 절대값으로 환산할 수 있게 됨을 목표로 한다 (Korea Institute of Standards and Sciences, 2016. 06. 22., http://www.kriss.re.kr/support/view.do?pg=standard_cor rection_01).
다만, 예를 들어, 기체의 어떤 부피 안에 물 성분이 몇 g 이 나 들어있는가를 나타내는 절대 습도보다는, 같은 물 성분 이 있어도 낮은 온도에서는 포화에 가까워서 상대 습도가 높지만 높은 온도에서는 포화로부터 멀어서 상대 습도가 낮은 점이 있고, 이것이 인간의 일상 생활에서는 더 쓸모가 있으므로 드물게 상대 측정값이 절대 측정값보다 더 많이 쓰이는 경우는 있다.
지구 과학(geoscience), 지구 공학(geoengineering) 및 지구 기술(geotechnology) 분야의 연구에서도 그 대상이 되는 자료는 관찰 또는 측정으로 얻는다는 점은 모든 과학, 공학, 기술에서와 마찬가지이다. 그런 뜻에서, 이 논문에서 는 지구 과학이라는 낱말이 특별한 언급이 없으면 지구 공 학, 지구 기술을 포함하는 것으로 여기겠다.
또한, 지구 과학(geoscience) 분야의 연구에서도 자료는 그 연구의 직접 대상이 되는 핵심 자료와 그 핵심 자료를 처 리, 해석하는 것을 도와 주는 보조 자료로 크게 나눌 수 있는 데, 전자는 각 연구 분야의 핵심 대상이 지질적 상황, 지구 물리적 상황, 지구 화학적 상황 등이 되는 것이고, 보조 자 료의 하나가 그 핵심 자료를 얻은 위치 및 시간, 그 자료를 얻을 때 관찰 또는 측정 기기의 방향, 방향 및 경사 등을 포 함할 때 쓰는 낱말인 자세 등이고, 이러한 보조 자료가 없이 는 핵심 자료를 더 잘 이해, 판단, 해석할 수 없다.
가장 중요한 보조 자료는 위치 및 시간이라고 할 수 있으 며 그 다음으로 중요한 것이 방위, 경사들을 포함하는 자세 라고 볼 수 있다. 특히, 벡터적 성질 또는 벡터의 기울기라 고 말할 수 있는 텐서적 성질을 가지는 경우에는 자세 자료 의 획득이 필수적이다.
지구 물리학 또는 물리 탐사에서, 벡터 성질을 가진 또는 텐서 성질을 가진 자료를 더 많이 쓴다는 맥락에서, 지질학 또는 지구 화학에서보다는 자세 자료가 필요한 경우가 더 많다고 할 수 있다.
이러한 위치, 시간, 자세 자료는 당연히 지구 공학, 지구 기술에서도 필요하다.
아래에서는 좌표 및 좌표계란 무엇인가?, 위치는 어떻게 측정하는가?, 시간은 어떻게 측정하는가?, 방위는 어떻게
측정하는가?, 자세는 어떻게 측정하는가?를 차례대로, 지 구 과학 특히 지구 물리학에서의 예들을 들면서 설명한다.
좌표 및 좌표계란 무엇인가?
좌표(coordinate)는 어떤 지점의 위치를 어떤 좌표계 (coordinate system) 또는 어떤 기준틀(reference frame) 또 는 어떤 측지 기준계(geodetic datum) 위에서 정의된 요소 들 중 위치를 나타내는 숫자들의 조합으로 나타내는 것이 다. 좌표계, 기준틀, 측지 기준계는 측지학(geodesy) 안에 서는 그 각각의 뜻매김이 서로 조금씩 다르게, 그리고 명확 하게 되어 있지만 여기서는 생략하며, 더 상세히 알기 위해 서는 (ITRF2014, 2016. 06. 22., http://itrf.ensg.ign.fr/ITRF_
solutions/2014/), Maling, D.H.(1992) 등을 참조하라. 이 논문에서는 특별히 더 상세하게 또는 엄밀히 말해야 될 경 우 외에는, 지구 과학에 종사하는 사람들에게 매우 친숙한 좌표계라는 낱말을 주로 쓰기로 한다.
지구 과학의 입장에서 보면 지구 위의 모든 점은 상대적 으로 정지해 있지 않고 언제나 움직이고 있다. 따라서 어떤 좌표계의 기준을 지구 위에만 둘 수는 없다. 현재, 좌표계를 구축함에 쓰이는 가장 중요한 다섯 종류의 자료는 VLBI (Very Long Baseline Interferometry; 초장 기선 간섭 측 정), GNSS(Global Navigation Satellites' System; 위성 항 법 시스템), SLR(Satellite Laser Ranging; 레이저로 위성 까지의 거리 측정), DORIS(Doppler Orbitography and Radio positioning Integrated by Satellite; 위성으로 통합된 도플러 궤도학과 전파 위치 측정), InSAR(Interferometric Synthetic Aperture Radar; 간섭 측정에 의한 합성 조리개 레이다)인데, 뒤의 네 가지는 그것의 샘(source)이 지구 위 에 있지만, 첫째인 VLBI의 샘(source)은 지구로부터 멀리 떨어진 퀘이사(quasar; 준성)이다. 이들 자료에 대해서는 (Malservisi, 2016, https://www.geophysik.uni-muenchen.de/
~malservisi/TectGPS.html), Herring(2016) 등을 참고하 라. 퀘이사로부터 오는 전파의 전단(wave front)은 평면파 이므로 지구 위의 두 점에 있는 두 안테나에 특정한 상이 도 달한 시간을 정밀하게 측정하고 그 시간의 차이를 써서 두 지점 사이의 거리, 방향 등을 계산하는 것이, 지구 위 또는 내부가 아니라, 지구 바깥의 우주에 그 기반을 둔 샘 (source)으로서 퀘이사를 쓰는 이유이고, 이렇게 함으로써 측정된 좌표계는 지구 위 또는 내부의 모든 점들의 운동에 종속되지 않는 절대적인 성질을 갖게 되는 것이다. 그래서 지금은 단순히 측지라고만 말하기보다는, 그 샘을 우주에 둔다는 점을 강조하는 뜻에서, 많은 경우에, 우주 측지 (space geodesy)라는 낱말을 쓴다.
좌표가 길이 차원이 2 개인 평면 또는 곡면에서의 좌표이
면 그 성분이 2 개가 되므로 (x, y)의 형태 또는 (n, e)의 형태 또는 (φ, λ)의 형태 등으로 나타낼 수 있고, 그 좌표가 3 차원 공간에서의 것이면 그 성분이 3 개가 되므로 (x, y, z)의 형 태 또는 (n, e, d)의 형태 또는 (φ, λ, h)의 형태 등으로 나타 낼 수 있다. 여기서, x, y, z 는 각각 X 축, Y 축, Z 축 방향의 성분값이고, n, e, d 는 각각 지리적인 북 쪽(N), 동 쪽(E), 수 직 아래 방향(Z)의 성분값이며, φ, λ, h 는 각각 위도 값, 경 도 값, 높이 값 또는 깊이 값이다. 앞의 두 가지 표현은 평면 직각 좌표(rectangular plane coordinate)라고 할 수 있으며, 뒤의 표현은 극 좌표(polar coordinate)라고 할 수 있다.
이러한 좌표계를 구성하는 가장 중요한 요소들은 지구의 평균 반지름과 편평율이고, 각각 조금씩 다른 두 요소들로 정의되는 타원체들은 각각 고유한 이름을 가지고 있다 (Earth ellipsoids, 2016. 06. 22., https://en.wikipedia.org/
wiki/Earth_ellipsoid)
우리나라가 세계 측지 기준계(World Geodetic (Reference) System : WGS)로 전환하기 전까지 써 왔던 베셀 1841 (Bessel 1841) 타원체는 평균 반지름이 6377397.155 m, 편 평율이 299.1528128 이고, 전환한 WGS 84 타원체는 평균 반지름이 6378137.298 m, 편평율이 298.257223563 이라 서 둘 사이에 측지학자의 입장에서 보면 상당한 차이가 있 다(National Geographic Information Institute, 2006).
그러므로 똑같은 지점에 대해서도, 서로 다른 좌표계에 서의 좌표를 계산해 보면, 좌표 중 x 또는 n 또는 φ는 평균 반지름의 차이 때문에, 그리고 좌표 중 y 또는 e 또는 λ는 편 평율의 평균 반지름의 차이 때문에 둘 사이에 차이가 생긴 다. 예를 들어, 대전에 있는 한국지질자원연구원의 지자기 절대 측정 좌대의 상부 중심의 좌표는, Bessel 1841 타원체 를 기준으로 하는 좌표계에서 인쇄된 옛날 식 지형도로부 터 계산해 낸 값으로는 (36° 22′ 33.09″, 127° 21′ 44.80″, hh.hhh)이고, WGS 84 타원체를 기준으로 하는 좌표계에 서 GNSS 수신기로 측정하여 얻은 값으로는 (36° 22′ 45.1 2″, 127° 21′ 33.58″, 72.076 m)이다. 두 좌표의 값을 비교 하면, 전자의 값으로부터 후자의 값으로 전환하면서, 위도 가 약 +10.9″, 경도가 약 –7.6″ 변화하며, 이것을 거리로 환 산하면, 위 대전 지역에서는 경도 1″ 당 24.833 m, 위도 1″
당 29.4 m에 해당하므로, 전자가 후자보다 북서 방향으로 약 371 m 어긋나는 것처럼 보인다.
이제는, 우리 나라도 공식적으로는 WGS 84 좌표계로 전 환했고, 전세계의 모든 나라들도 모두 WGS 84 좌표계 또 는 그와 매우 가까운 좌표계를 쓰는 쪽으로 이동하고 있으 며, 지금 쓰고 있는 서로 다른 좌표계들 사이의 기준 타원체 의 평균 반지름들이 1 m 이내로 좁혀졌고, 편평율도 소숫점 아래 셋째 자리까지는 똑같은 정도까지 가까워졌으므로, 앞으로는 측지학 자체가 아니고, 일반적인 지구 과학 분야
에서는 가장 새로운 버전의 어떤 한 좌표계를 쓰면 전세계 의 누가 얻은 좌표라도 별도의 특별한 변환 과정을 거치지 않고도 바로 쓸 수 있다.
위치는 어떻게 측정하는가?
지구 과학 분야에 있어서는, 인문 과학, 사회 과학 분야 등 에서와는 달리, 어떤 자료를 관찰한 또는 측정한 지점의 위 치가 매우 중요하다. 그 위치는 높이 차원을 따지지 않을 경 우에는 2 차원 좌표가 될 것이고, 높이 차원까지 측정하면 3 차원 좌표가 될 것이다.
이러한 위치는 어떻게 측정하는가? 측지학을 제외한 지 질학, 지구 물리학, 지구 화학 등 지구 과학의 입장에서 보 면 위치는 획득하는 여러 가지 자료들 중 보조 자료가 되고, GNSS 의 획기적인 발달로 지구 과학자가 쉽게 위치 자료 를 획득하기 전까지는 측량 전문가가 위치 자료를 얻어서 지구 과학자에게 넘겨주는 것으로 여겼다. 측량에 관해서 는 더 이상의 설명은 생략하겠고, 이름 위해서는 이영진 (2016) 등을 참고하라.
2016년 현재, 측지학 분야가 아닌 분야에서 일하는 지구 과학자들은 대부분의 위치 측정을 GNSS를 통해서 한다.
그 이유는 많은 시간과 노력을 들이지 않고도 지구 과학 분 야에서 요구하는 불확도(uncertainty)의 위치 자료를 얻을 수 있기 때문이다.
Hazen과 Trefill(2015)은 인문, 사회 과학 분야에서 일하 는 일반 국민도, 정책에 대한 투표 등을 통하여 국민의 권리 를 제대로 행사하기 위해서는, 모든 정책의 뿌리에는 과학, 공학, 기술이 있으므로, 과학, 공학, 기술의 기본은 알아야 한다고 말한다.
비슷한 논리는 과학, 공학, 기술 분야에서 일하는 사람들 에게도, 보조 자료에 대해서 전문가만큼 알아야 하는 것은 아니지만, 그 기본은 알아야, 자신이 얻은 핵심 자료를 처리 하고 해석함에 있어서 유리할 것이다. 이런 뜻에서 지구 과 학에서 쓰는 위치 자료를 얻음에 있어서 기본 원리 등을 알 아야 하는 것이다.
GNSS 에서 어떤 한 지점의 위치를 측정하는 원리는 삼변 측량법이다. 삼변 측량법에서는 각 기준점(여기서는 위성 의 송신 안테나)으로부터 대상(여기서는 측점)까지의 거리 를 알 경우, Fig. 3에서와 같이, 각 위성으로부터 같은 거리 를 가지는 점의 자취인 구를 만들 수 있는데, 여러 개의 구들 이 교차하는 지점이 GNSS 수신기 사용자의 위치 즉, 측점 의 위치이다.
삼변 측량법을 이용하여 3 차원 공간에서 사용자의 위치 즉, 측점의 위치를 계산하기 위해서는, 수학적으로는 측점 의 좌표인 , , 세 개의 미지수를 결정해야 하며 적어도 3
Fig. 3. Positioning with trilateration.
Fig. 4. Synthesis of coordinates' uncertainty(1 σ) in positioning by GNSS.
개의 기준점 즉, 위성으로부터 오는 신호와 기준점까지의 거리에 대한 정보 즉,
× (2)
: 수신기와 위성 사이의 거리
(, , ) : 추정하고자 하는 사용자 즉, 측점의 좌표 (, , ) : 위성 즉, 위성의 송신 안테나의 좌표
: 위성과 수신기 사이의 시각 오차
: 신호의 전파 속도 즉, 빛의 속도
가 필요하므로, GNSS에서는 적어도 3 개 이상의 위성으로 부터 신호를 받아야 한다.
GNSS 위성과 사용자 사이의 거리를 계산하기 위해서는 위성 신호의 송신 시간과 사용자의 수신기에서의 수신 시 간이 필요하며, 이로부터 전파 전달 시간(Fig. 3 에서의 등)을 계산할 수 있다. 정확한 전파 전달 시간을 측정하기 위해서는 위성의 시각과 송신기와의 시각이 동기되어 있어 야 하지만 위성과 수신기가 사용하는 각 시계(clock)의 경 우 서로 동 특성이 다르므로 위성과 수신기 사이에는 시각 차이가 있게 된다. 따라서 수신기에서 추정한 위성으로부 터의 거리는 시각 오차에 대한 성분이 추가된 형태로 나타 나며, 두 점 사이의 거리를 구하는 간단한 계산식에 적용함 으로써 위 식 (2)와 같이 표현할 수 있다.
식 (2)에 대한 방정식을 풀기 위해서는 측점의 좌표 성분 인 3 개의 미지수 뿐만 아니라 위성과 수신기 사이의 시각 오차()까지 모두 4 개의 미지수를 결정해야 하기 때문에 4 개 이상의 방정식이 필요하다. 즉, 사용자의 위치를 정확하 게 계산하기 위해서는 적어도 4 개 이상의 위성으로부터 신 호를 수신하여야 한다. 이때 수신한 위성으로부터 받은 신 호로부터 수신기의 위치 및 시각을 추정하기 위해서는 적 어도 4 위성의 좌표와 각 위성과 수신기 사이의 거리()에 대한 정보가 필요하다. 이러한 정보는 위성에서 송신하는
신호 안에 항법 데이터, 코드 분할 다중 접속(CDMA: Code Division Multiple Access)을 위한 코드, 그리고 반송파 등 으로 이루어져 있다. 이러한 정보들을 처리하는 과정은 여 기에서는 생략하며, 이들을 좀 더 상세히 알기 위해서는 Lee and Park(2015), Seeber(2003) 등을 참고하라.
위와 같이 하여 우리가 얻은 위치 자료의 불확도(1 σ(표 준 편차) 기준)를 종합적으로 나타낸 것이 Fig. 4이다. 이로 부터 RTK(Real Time Kinematic; 실시간 이동 측량)를 사 용하면 수평 불확도 6 cm 이하까지 위치 자료를 얻을 수 있 고, PDGNSS(Post Processed Differential GNSS; 후처리 차분 GNSS 계산)를 쓰면 수평 불확도 1 cm 이하까지 위치 자료를 얻을 수 있다. 수직 불확도는, 위성이 발 밑 방향으 로는 배치되어 있지 않기 때문에, 수평 불확도의 1.5 ~ 2 배 정도 된다. 이보다 더 정밀한 위치 자료를 얻으려면 GNSS 가 아닌 더 정밀한 토탈 스테이션이나 수준 측량이 필요하다.
이제 우리가 위치 3 성분을 아는 어떤 점 “p”에서 얻은 측 정값 “m”을 로 나타낼 수 있을 것이며, 이제부터는
의 값을 각 길이 방향으로 측정하고, 두 점 사이의 차 이를 계산하면 그것이 길이에 대한 기울기가 될 것이다.
시간은 어떻게 측정하는가?
2016년 현재, 지구 과학자가 가장 싸고, 쉽게 그리고 가장 정확하게 시각을 측정하는 방법은 GNSS로부터 나오는 정 밀 시각으로 자신이 쓰는 관측 기기 또는 측정 기기의 내부 시계를 적절한 주기로 동기화한 뒤, 그 내부 시계를 쓰는 것 이다.
각 GNSS 위성에는 매우 정확한 원자 시계가 적어도 2 대 실려 있고, 이 시계들은 위성 자체의 지구 둘레의 회전 속도 에 따르는 시간 지연 오차까지 보정하여, ns(nano-second, 10-9초) 단위까지 정확하다(Lee et al., 2008). 그리고 위 “위
치는 어떻게 측정하는가?”에서 설명한 대로, 수신기의 위 치를 계산하면서 수신기 자체의 시계를 보정하게 되는데, 기본적으로 불확도가 1 σ 기준으로 40 ns 정도 된다(Lee, 2016). 그러므로 측지학이나 측정학 등을 제외한 일반적인 지구 과학에서는 0.1 μs 이내인 이 정도의 시각이면 충분할 것이며, 더 정밀한 시각을 요구하는 경우에는 한국표준과 학연구원 시간 센터(http://www.kriss.re.kr/introduce/mem- berlist.do?office=7¢er=3, 2016. 06. 26.)에 문의하라.
이제 우리는 위치 3 성분을 아는 어떤 점 “p”에서 시간 “t”
에 얻은 측정값 “m”을 로 나타낼 수 있을 것이며, 이 제부터는 의 값을 각 길이 방향으로 측정하고, 두 점 사이의 차이를 계산하면 그것이 길이에 대한 기울기가 될 것이며, 변화하는 “t”에 대해서 을 계속 측정하면 모니터링을 하는 것이 된다.
방위는 어떻게 측정하는가?
방위각(azimuth angle)은 어떤 두 점을 연결하는 기선 (baseline)이 가리키는 방향을 보통 진북으로부터 오른쪽 으로 측정한 각을 말한다. 이를 위한 방법들에는 나침반을 이용하는 방법, 해시계(태양 나침반)을 이용하는 방법, 삼 각점들을 이용하는 방법, GNSS 나침반을 이용하는 방법, 자이로 나침반 즉, 자이로 콤파스를 이용하는 방법, 이들 중 적어도 둘 이상의 여러 가지 방법들을 복합적으로 이용하 는 방법 등이 있다.
먼저, 나침반을 이용하는 방법은 자침을 이용하는 가장 고전적인 방법으로서, 쉽게 쓸 수 있는 장점이 있으나, 크기 가 작은 경우에 불확도가 낮다는, 크기가 커도 인공적인 또 는 지질적인 잡음이 적어야 한다는, 그리고 주위의 지자기 장의 편각 분포를 알고 있어야 하는(Thébault et al., 2015) 등의 단점들이 많다. 그럼에도 다른 아무런 대안이 없을 때 는 이를 사용하여야 한다.
다음으로 해시계(태양 나침반)을 이용하는 방법은 내가 있는 위치의 경도(longitude)를 알고, 정확한 시계가 있을 경우에 어떤 특정한 시간에 태양의 방위각이 얼마라는 것 을 알 수 있으므로 기선의 방위각을 계산할 수 있지만, 실제 로 정확한 측정을 위해서는 매우 높은 수준의 숙련이 필요 하고, 태양이 보일 때만 가능하며, 태양의 고도(altitude)가 되도록 낮은 아침이나 저녁에 측정하는 것이 더 좋다는 등 의 단점이 있다. 이것의 실시 예는 Lim et al.(2004)을 참고 하라.
그리고 삼각점들을 이용하는 방법은 삼각점들의 위치를 알고, 따라서 여러 삼각점들을 연결하는 기선들의 방위각 들을 알므로 방위각을 측정하고자 하는 기선의 방위각을 이미 알고 있는 기선의 방위각으로부터 상대적으로 측정하
여, 계산한다(Lee, Y. J., 2016).
다음에 GNSS 나침반을 이용하는 방법은 GNSS 안테나 두 개를 어떤 프레임 위의 알고 있는 기선의 양 끝에 설치하고, 두 안테나로부터 측정된 위성 신호들을 DGNSS(Differential GNSS; 차분 GNSS 계산)을 통하여 프레임 위의 기선의 방 위각을 측정하는 방법인데, 기선의 길이가 길수록 불확도 는 더 작아진다. 이 방법은 매우 쓰기 쉬운 방법이지만, 오 차가 별로 없는 위성 신호가 있는 하늘이 열린 장소에서만 쓸 수 있다는 단점이 있다. 이러한 방법을 구현하기 위한 기 기의 종류는 아주 많으며, 한 예는 Hemisphere(2010)이다.
또 자이로 나침반 즉, 자이로 콤파스를 이용하는 방법이 있는데, 1) 종래의 회전식 자이로의 경우에는 회전축을 수 평으로 그리고 되도록 진북에 가깝도록 놓고 기다리면 수 평으로 놓인 자이로의 원리에 의하여 회전축이 진북 즉, 지 구의 회전축 방향을 가리키면서 스윙하게 되므로, 우리가 목표로 하는 기선이 이 방향 즉, 진북으로부터 얼마나 떨어 져 있는가를 측정함으로써 방위각을 측정하게 된다 (Wikipedia, 2016. 06. 22., gyro compass).
또 2) 광 섬유를 이용하는 자이로(Fiber Optic Gyroscope;
FOG) 등의 경우에는, 어떤 지점 즉, 경도와 위도를 아는 측 점에서의 자연 상태의 회전 각속도(angular velocity)는 지 구의 자전의 회전 각속도에 따라서 이론적으로 결정되어 있으므로 그 벡터를 아는데, 이를 라 하자. 또, 임의의 방 향에 둔 3 축 자이로로 각속도 벡터를 측정했을 때 그것을
라 하자. 그러면 두 벡터는 똑같은 것을 측정한 것이 되 고, 후자를 각 축을 따라서 오일러 각들만큼 회전하면 전자 가 되어야 한다(Wikipedia, 2016. 06. 27., Euler Angles).
두 벡터 사이를 중개해 주는 회전은, 여러 가지 회전 중 x-y-z 회전을 적용하면 X 축, Y 측, Z 축을 중심으로 회전한 다고 할 때, 그 각도가 각각 roll, pitch, yaw 가 되고, 이를 각 각 ψ, θ, φ라 하면 아래의 식 (3)과 같이 되고(Wolfram- MathWorld, 2016. 06. 27., Euler Angles), Fig. 5는 세 각만 큼 차례대로 회전하는 것을 보여 준다.
= rot(-φ) * rot(-θ) * rot(-ψ) *
=
cos sin
sin cos
cos sin
sin cos
cos sin
sin cos *
=
*=* (3)
여기서, d11, ..., d33 은 x-y-z 회전의 경우 다음 식 (4)~식 (12)과 같다. 즉,
Fig. 5. Euler's rotations around local x’ axis by ψ, local y’ axis by θ, and local z’ axis by φ in turn from the right to the left, after WolframMathWorld(2016. 06. 27.).
d11 = -sinψsinφ + cosθcosφcosψ (4)
d12 = sinψcosφ + cosθsinφcosψ (5)
d13 = -cosψsinθ (6)
d21 = -cosψsinφ - cosθcosφsinψ (7)
d22 = cosψcosφ - cosθcosφsinψ (8)
d23 = sinψsinθ (9)
d31 = sinθcosφ (10)
d32 = sinθsinφ (11)
d33 = cosθ (12)
식 (3)에서 와 를 알고 있고, 안의 각 성분 d11, ..., d33 은 ψ, θ, φ의 선형 항이 아니므로, 식 (3)의 ψ, θ, φ는 결국 비선형 최소 제곱 근사 방법(nonlinear least squares fitting method)을 통하여 계산할 수 있다(Strang, 1986).
이렇게 하여 구한 φ가 자이로스코프의 X 축이 진북과 만 드는 각, 즉 yaw 또는 방위각이 된다. 만약 어떤 관측 기기 또는 측정 기기의 좌표 축들을 자이로스코프의 그것들과 일치시켜 놓았다면 관측된 또는 측정된 값을 수직 아래로 축 즉 Z 축을 중심으로 회전하면 측정된 값을 마치 기기의 방위각이 0이 되도록 놓은 상태에서 측정한 값으로 바꿀 수 있다.
위와 같은 마지막의 두 가지 방법을 쓰면 외부의 기준점 없이, 예를 들면 숲 속이나, 물 속, 굴 속 등에서도 방위각을 측정할 수 있으나 아직은 기기의 값이 비싸다는 단점이 있 다. 각각의 예로서 GYRO X II (Sokkia, 2016. 06. 27.)와
EGIS-N1000K(Navcours, 2016. 06. 27.)를 들 수 있다.
자세는 어떻게 측정하는가?
우리가 어떤 공간에서 벡터 성질을 가진 지구 자기장을 측정한다고 하자. 지자기 절대 측정에서는 어떤 기선을 설 정하고 그 방위각을 미리 측정해 둔다. 그리고 측정 좌대 (plinth) 위에 1 축 자기 다발문(fluxgate) 자력계 센서의 축 과 망원경의 축을 정렬해 놓은 경위의(theodolite)를 올려 놓고, 수평을 맞춘 뒤, 그 지점의 지구 자기장의 편각 및 복 각을 측정하게 된다. 즉, 경위의의 좌표계를 북쪽을 X 축 또 는 N 축, 동쪽을 Y 축 또는 E 축, 수직으로 아래 쪽을 Z 축으 로 하는 지리 좌표계와 일치시켜 놓은 것이다(National Institute of Meteorological Research, 2014).
그러므로 지자기 상시 측정소에 설치되어 있는 3 축 자기 다발문 자력계 센서의 X 축, Y 축, Z 축과 지리 좌표계의 N 축, E 축, Z 축 사이의 상관 관계 즉, ψ, θ, φ를 알고 있는 것 과 같고(National Institute of Meteorological Research, 2014), 그 관계는 위의 식 (3)을 약간 바꾼 아래의 식 (13)과 같이 된다.
= * (13)
여기서, 아래 첨자 geo는 지리(geographic) 좌표계를 rand 는 임의의(random) 좌표계를 뜻한다. 즉, 지자기 상시 측정 소의 3 축 자기 다발문 자력계로 측정된 자기장 벡터
를 오일러 각 세 개 즉, ψ, θ, φ만큼 회전함으로써 지 리 좌표계 위에서의 자기장 벡터 로 바꿀 수 있는 것 이다.
그러나 만약 우리가 3 축 자기 다발문 자력계를 써서 이동 하면서 자력 탐사를 할 경우에는 각 측점에서의 오일러 각 세 개 즉, ψ, θ, φ를 실시간으로 얻을 수 있어야 측정된 임의 의 좌표계에서의 자기장 벡터를 지리 좌표계 위에서의 자 기방 벡터로 바꿀 수 있다.
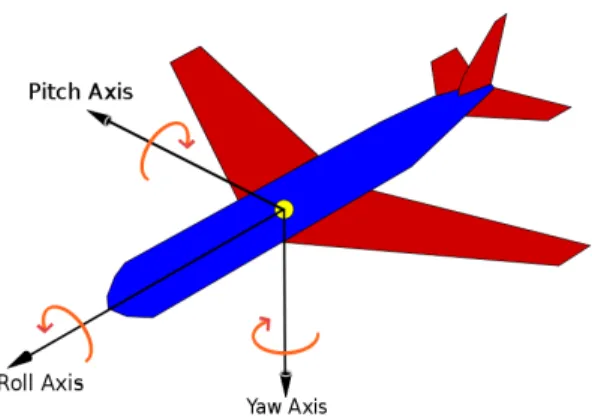
Fig. 6. Correspondence of Roll axis to X axis, Pitch axis to Y axis, and Yaw axis to Z axis, Pitch angle ψ is measured from the +X(Roll) axis downward, Roll angle θ is measured from the +Y(Pitch) axis downward, and Yaw angle φ is measured clockwise around +Z(Yaw) axis.
Fig. 7. Schematic diagram of the assembled KGMDL, after Lim et al.(2013).
어떤 알고 있는 좌표계 예를 들면 지리 좌표계에 대해서 어떤 임의의 좌표계 예를 들면 위에서 말한 3 축 자기 다발 문 자력계 센서의 좌표계 사이의 오일러 각 세 개 즉, ψ, θ, φ를 일컬어 자세(attitude)라 한다.
자세를 이루는 세 각 ψ, θ, φ는 보통 비행기나 배의 항행 에서 쓰이는 낱말로는 pitch, roll, yaw 에 해당하고(Fig. 6.), 다른 말로 하면 각각 X 축의 경사, Y 축의 경사, 방위각에 해 당한다.
방위각을 측정하는 방법은 앞의 “방위는 어떻게 측정하 는가?”에서 설명한 바와 같으므로, 기본적으로는 경사각 2 개를 더 측정하면 어떤 프레임의 자세 성분 세 개를 다 측정 하는 것이 된다. Fig. 7은 바로 앞에서 설명한 것처럼, Lim et al.(2013)이 구축한 KGMDL인데, GNSS 나침반 1 개, 2 축 경사계로 이루어진 자세 측정 장치의 모식도를 보이고 있다.
측정한 위치, 방위, 자세를 종합함으로써 얻을 수 있는 잇점
최근에는 위에서 설명한 위치, 시간, 방위, 자세를 통합하 여 측정할 수 있는 시스템이 개발되어 있다.
보통 이러한 시스템 안에는 3 축 가속도계, 3 축 자이로스 코프, 3 축 자력계, 기압계가 기본으로 장착되어 있고, GNSS 안테나 1 개 또는 2 개 붙여져 있다.
이러한 시스템을 GNSS/INS(Inertial Navigation System;
관성 항법 장치) 시스템이라 부르기도 하고, AHRS(Attitude, Heading Reference System; 자세, 방위 측정 시스템)이라 부 르기도 하는데, 둘 사이에 근본적인 차이는 없으나, 전자가 후 자에 비해 좀 더 비싸고, 좀 더 정밀한 시스템을 일컬을 때 쓰는 낱말이다. 한국지질자원연구원이 쓰고 있는 VectorNav 사의 VN-300 시스템을 예로 들 수 있다(VectorNav, 2016. 06. 29.).
3 축 가속도계로부터 시간에 대해서 한 번 적분하면 속도 가, 또 한 번 적분하면 3 축 방향으로의 거리가 나오는데, 이 것이 결국 위치가 된다.
중력 가속도는 언제나 지구 중심을 향하는데, 3 축 가속 도계의 X 축 성분과 Y 축 성분을 측정함으로써 X 축 방향 의 경사 즉 pitch 와 Y 축 방향의 경사 즉 roll 을 계산할 수 있다.
3 축 자이로스코프의 각속도의 초기값을 알고, 측정되는 각속도를 시간에 따라 적분하면 3 축의 경사 즉, 자세를 계 산하게 된다.
3 축 자력계는 위의 “방위는 어떻게 측정하는가?”에서 설명한 바와 같이 방위를 측정한다.
위와 같이, GNSS/INS 시스템이나 AHRS 안에서는 위치 추정은 2 가지 이상의 기기가, 방위 추정은 3 가지 이상의 기기가, 자세 추정은 2 가지 이상의 기기가 동시에 추정하 고 있다. 추정치는 실시간으로 칼만 필터 등을 통해서 가장 합당한 자료가 유지되고 있다. 2 가지 이상의 기기로 추정 되는 값들 중 어느 것을 더 믿을 수 있는 자료로 택하는가는 약 하게 결합하거나(loosely couple) 강하게 결합하여(tightly couple) 결정한다(Yu et al., 2010).
이제 우리는 어떤 값, 예를 들면 자기장 를 측정함에 있어 서, 측점에서 기기의 위치, 시간, 방위를 포함하는 자세를 아 는 상태에서 측정하면 그것을 의 형태로 쓸 수 있다.
모든 관측 및 측정에서 같은 샘이 발생하는 더 많은 종류 의 값을 알수록 우리는 그 샘을 더 상세하게 해석할 수 있다.
예를 들면 중력 변화율 측정(gravity gradiometry)으로 지하 구조를 더 뚜렷이 해석할 수 있고(Rim and Li, 2012), 그 안에 핵심 부품으로 자이로스코프, 경사계, 방위각 측정 기, 거리 측정기가 들어 있는 레이저 스캐너도 위에서 설명 한 위치와 자세를 정밀하게 측정하고 그 자료를 이용하기 때문에 지구 과학에서 유용하게 쓰이고 있다.
Table 1. Magnetic field values that can be acquired by different magnetometers and different numbers of magnetometers
kind of magnetometer numbers of magnetometers Magnetic field values acquired Remarks
scalarial 1 1 value
scalarial 3 , δδ, δδ, δδ 4 values
vectorial 1 , , , 4 values
vectorial 3
, , , ,
13 valuesTable 1은 자력 탐사에서 어떤 자력계를 몇 개나 쓰는가에 따라서 우리가 얻을 수 있는 자료들을 정리하여 보여 준다.
맺는 말
지금까지 지구 과학에서 관측 또는 측정을 할 때에는 자세 를 크게 고려하지 않았다. 그 이유는 자세를 관측 또는 측정 하는 방법이 어렵고, 그것을 위한 비용이 높았기 때문이다.
그러나 기술의 발전에 따라 위치 및 시간, 방위를 포함하 는 자세를 관측 또는 측정하는 기기들이 많이 개발되어 있 으므로, 벡터 성질을 가진 어떤 값을 관측 또는 측정하더라 도 이러한 기기를 이용할 수 있게 되었다.
지구 과학에서 어떤 한 샘은 단 한 가지의 값만을 생성하 지는 않는다. 그 샘이 생성하는 되도록 많은 종류의 값들을 측정하고 그것들을 종합하여 처리해야만 더 정확하고 상세 한 해석 결과를 얻을 수 있다.
지구 과학에서 관측 또는 측정하는 값들 중 벡터의 성질 을 가지지 않는 값은 거의 없다. 그러므로 거의 모든 관측 및 측정의 경우에 GNSS/INS 시스템이나 AHRS 시스템을 설 치해서 자료를 얻을 필요성이 있는 것이다. 예를 들어 GPR(Ground Penetrating Radar; 지표 투과 레이다) 시스 템에 있어서도 GPR 기기의 프레임에도 GNSS/INS 시스템 이나 AHRS 시스템을 설치해서 자료를 얻고 그 자료를 GPR 자료의 해석에 참고함으로써 저 정확하고 상세한 결 과를 얻을 수 있게 될 것이다.
References
Earth ellipsoids, 2016. 06. 22., https://en.wikipedia.org/wiki/
Earth_ellipsoid.
Hazen, R.M. and Trefill, J., 2009, “Science Matters”, Anchor Books, translated into Korean by Lee, Ch. H., 2015,
“Keys to Science”, Gyoyangin.
Hemisphere Inc., 2010, SSV-100 Manual Rev. A.
Herring, Th., 2016.06.26., Geodetic methods of Essentials of Geophysics, http://www-gpsg.mit.edu/~tah/classes.htm.
ITRF, ITRF2014, 2016. 06. 22., http://itrf.ensg.ign.fr/ITRF_
solutions/2014/.
Korea Institute of Standards and Sciences, Story of standards, 2016. 06. 22., http://www.kriss.re.kr/standard/ view.do?pg=
standard_define.
Korea Institute of Standards and Sciences, What is calibration?, 2016. 06. 22., http://www.kriss.re.kr/support/view.do?pg=
standard_correction_01.
Lee, S.J. and Park, Ch.S., 2015., “the Present and the future of GNSS,” J. of the Korean Institute of Communications and Information Sciences, Vol. 32, No. 8, pp. 11-15.
Lee, S.J., 2016, personal communication on “the uncertainty of the time acquired during the GNSS data processing”.
Lee, S.W., Lee, Ch.B. and Yang, Seonghun, 2008. “Precision Remote Clock Synchronization using GNSS Carrier-Phase Common-View method,” Proc. of the 15th GNSS Workshop, Busan, Korea, Oct 31.
Lee, Y.J., 2016, Surveying and Geoinformatics, Cheongmungak, p. 454.
Lim, M.T., Park, Y.S., Cho, J.D., Rim, H.R., Ko, I.S., Shin, H.M. and Gwak, B.W., 2004, “Determining the azimuth of a baseline by measuring the apparent direction of the sun,” J. of Korean Society of Surveying, Geodesy, Photog- rammetry and Cartography, Vol. 2, No. 4, pp. 411-418.
Lim, M.T., Park, Y.S., Shin, Y.H., Rim, H.R., Jung, H.K., Lee, Y.S., Kim, K.O. and Jeon, T.H., 2013, Investigation of the so-called Magnetic North Immeasurable Area in the South Sea of Korea by a newly assembled three axis Magnetometer, Proc. of ASEG-PESA 2013 Conference and Exhibition, Melbourne, Australia.
Maling, D.H., 1992, Coordinate Systems and Map Projections, Elsevier Science & Technology Books.
Malservisi, R., 2016.06.26., Tectonics through geodesy (GPS), https://www.geophysik.uni-muenchen.de/~malservisi/
TectGPS.html.
임 무 택
1979년 서울대학교 자원공학과 공학사 1984년 서울대학교 자원공학과 공학 석사 1991년 프랑스 파리 6 대학교 지구물리학
과 이학 박사
현재 한국지질자원연구원, 한반도 광물자원 개발을 위한 융합연 구단, 책임연구원
(E-mail; [email protected])
정 현 기
현재 한국지질자원연구원 탐사개발연구실 책임연구원 (本 學會誌 第51券 第5号 參照)
임 형 래
1996년 서울대학교 지구과학교육과 이학사 1998년 서울대학교 과학교육과 교육학석사 2005년 서울대학교 과학교육과 교육학박사
현재 한국지질자원연구원 광물자원연구본부 탐사개발연구실, 선임연구원
(E-mail; [email protected])
박 영 수
1976년 서울대학교 자원공학과 공학사 1979년 서울대학교 자원공학과 공학석사 1986년 서울대학교 자원공학과 공학박사
현재 한국지질자원연구원 광물자원연구본부 탐사개발연구실, 전문연구원
(E-mail; [email protected])
신 영 홍
1992년 부산대학교 지구과학과 학사 1995년 부산대학교 지질학과 석사 2004년 부산대학교 지구과학과 박사
현재 한국지질자원연구원 광물자원연구본부 선임연구원 (E-mail; [email protected])
National Geographic Information Institute, 2006. Technological directives related with changing to the World Geodetic System of public survey results, Publication record no.
11-1500714-000042-01.
National Institute of Meteorological Research, 2014, Manual of Absolute Geomagnetic Measurement, Publication Record No. 11-1360395-000462-01, Technical Note NIMR-TN- 2014-009.
Navcours, Extended GNSS/INS System, 2016. 06. 27., http://www.navcours.com/biz/biz_0103.asp.
Rim, H. R., and Li, Y. G., 2012, “Single-hole imaging using borehole gravity gradiometry,” Geophysics, Vol. 77, No.
5, pp. G67–G76.
Seeber, G, 2003, Satellite Geodesy, Walter de Gruyter, pp. 589.
Sokkia, Sokkia Catalog 2014-2015, 2016. 06. 27., https:
//www.sokkia.co.kr/UserFiles/File/sokkia_Ca2014-2015.pdf.
Strang, G., 1986, Linear Algebra and its Applications, Harcourt
Brace Jovanovich Publishers.
Thébault et al.(47 persons), 2015, International Geomagnetic Reference Field: the 12th generation, Earth, Planets and Space, Open Access Letter, pp. 67-79.
VectorNav, VN-300 User Manual, 2016. 06. 29., http://www.
vectornav.com/.
Wikipedia, Euler Angles, 2016. 06. 27., https://en.wikipedia.
org/wiki/Euler_angles#mw-head.
Wikipedia, gyro compass, 2016. 06. 22., https://en.wikipedia.
org/wiki/Gyrocompass.
WolframMathWorld, Euler Angles, 2016. 06. 27., http://
mathworld.wolfram.com/EulerAngles.html.
Yu, H.S., Lee, Y.S. and Park, H.W., 2010, “An attitude error estimation performance comparison of Tightly Coupled INS/GPS Navigation System using Different measurements,”
Proc. of the 17th GNSS Workshop, Jeju, Korea.