자성유체 내에서 비자성체의 수동적 부양 조건
전상현† · 남윤주* · 박명관**
The requirements of passive levitation for nonmagnetic body in magnetic fluid Sang-Hyeon Jeon, Yun-Joo Nam and Myeong-Kwan Park
Key Words : Magnetic fluid(자성유체), Passive levitation(수동부양), magnetic levitation(자기부양) Nonmagnetic body(비자성체)
Abstract
In this paper, the requirements of passive levitation for nonmagnetic body in magnetic fluid are investigated. The passive levitation system includes the electromagnetic system composed of two hollow solenoids, the magnetic fluid and the nonmagnetic body made of aluminum. The hollow solenoids generate nonuniform magnetic fields, leading to the gradient of the magnetic field in magnetic fluid. Hence, the resultant magnetic body force in magnetic fluid is used to levitate the nonmagnetic body in the opposite direction of the gravitation. The levitation conditions according to applied current and the mass of the nonmagnetic body are obtained analytically.
기호설명 H : 자기장 (A/m)
M : 자화 (A/m)
V : 비자성체의 체적( m3) Fm: 자기체적력 (N) Fb: 부력 (N)
ρ : 비자성체의 밀도 (kg/ mO 3) ρ : 자성유체의 밀도 (kg/ mm 3) g: 중력가속도 (m/s2)
μ : 진공투자율 (H/m) 0
1. 서 론
자성유체는 고체와 액체의 혼합액으로 크기가 나노(nano) 사이즈의 강자성 미립자와 용매에 해 당되는 베이스 유체(base liquid) 및 계면활성제로 구성된다. 외관상 액체 자신이 자성을 갖는 것처
럼 거동하고, 유체의 고유 특성인 유동성과 고체 의 고유 특성인 자성을 공유한 자연계엔 존재하지 않는 새로운 물질이다. 이러한 특성에 의하여 자 성유체는 외부 자기장에 의해 계면 형상변형운동 을 발생시키거나, 자기장에 의하여 관내 비정상유 동을 제어할 수도 있다. 또한 자성유체 내에 들어 있는 물체는 자기장의 구배에 따라 압력의 구배를 받으며, 이러한 압력의 구배를 이용하여 납과 같 은 무거운 물질을 부상시키거나, 역으로 가벼운 플라스틱을 침강시킬 수도 있다.
자성유체를 이용한 부양시스템은 크게 자성유 체에 잠긴 자성체의 자기부양(self levitation)시스템 과, 외부자기장이 가해지는 자성유체 내에 잠긴 비자성체의 수동부양시스템(passively levitation)으로 구분된다. 허나 기존의 연구들은 자성체든 비자성 체든 부양된 후 외부 왜란에 의한 동특성, 진동특 성 그리고 부양된 액적의 형상변화들을 고찰한 바 는 있지만 자성유체 속 물체가 부양되기 위한 조 건 등이 고찰된 적은 없다.
본 연구의 목적은 두 개의 공심 솔레노이드를 이용하여 자기장의 구배를 발생시키고 공심 솔레 노이드 내부에 자성유체와 자성유체에 잠긴 비자 성체인 알루미늄 물체를 위치시켜, 솔레노이드의 자기장에 의하여 비자성체인 알루미늄 물체가 수 동 부양되는 조건을 이론적으로 고찰해보고, 부양 후 솔레노이드에 가해지는 전류의 변화에 따른
† 부산대학교 지능기계공학과 석사과정 E-mail : bndream@naver.com
TEL : (051)514-3054 FAX : (051)514-0685
*
부산대학교 대학원 지능기계공학과**
부산대학교 기계공학부 및 기계기술연구소Fig. 1 System configuration
평형 점 변화와, 제어 가능한 구역을 이론적 해석 과 실제 자기장 값에 근거한 시뮬레이션 값을 비 교해보고자 한다. 그리고 향후 위에서 고찰된 결 과들을 바탕으로 실제 시스템을 제작, 실험을 실 시하여 이론적인 값과 비교하고, 액추에이터로서 의 성능을 평가하기 위해 진동, 온도 등의 외부조 건에 따른 동특성을 살펴보고자 한다.
2. 시스템 구성
2.1 시스템 구성
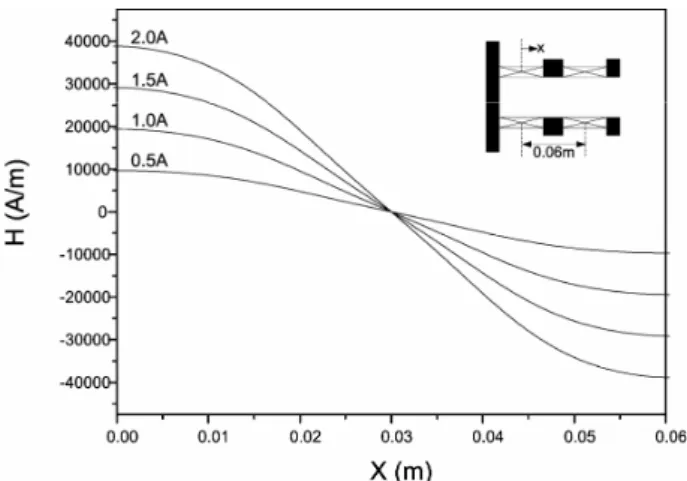
시스템은 코일중심에서 서로의 거리가 a(0.06m) 만큼 떨어진 두 개의 공심 코일 내부에 유체 컨테 이너가 위치하고, 다시 컨테이너 내부에 자성유체 와 부양하고자 하는 비자성체가 놓여져 있다. 각 코일의 전류흐름은 반대이며, 따라서 코일내부에 생성되는 자기장의 방향은 반대이다. 생성되는 자 기장은 각 코일의 중심지점(x=0,a)에서 최대가 되 어 점점 감소하다가 a/2(0.03m)지점에서 최소가 된 다.
Fig.1 은 시스템의 구성을 나타낸다.
3. 이론적 해석
3.1 비자성체 부양조건
자성유체에 잠긴 물체에 작용하는 자기체적력은
0
Fm = −μM HV∇ (1)
여기서, ∇H는 자기장 구배이다.
자화 M 과 자기장 구배 ∇H는 체적 에 대하여 일정하다고 가정하였다.
V
자성유체에 잠긴 물체에 작용하는 부력은 Fb =ρmgV−ρOgV (2)
자성유체에 잠긴 물체가 중력을 이기고 부양하기 위해서는
0
( O m)g
M H ρ ρ α
μ
∇ ≤ − − = (3)
여기서, ρO =2700kg m/ 3, ρm =1390kg m/ 3 g=9.81 /m s2, μ0 = 4π ×1 0−7H /m α= −1.04529 10× 10A2/m3
따라서, M H∇ ≤ −1.04529 10× 10A2/m 인 조건에서 3
비자성체인 알루미늄( )을 부상시킬
수 있게 된다.
2700 / 3
O kg m
ρ =
3.2 공심 솔레도이드 설계
일정한 자기장 구배를 발생시키기 위해 같은 형 태의 공심 솔레노이드 두 개를 근접시키고, 각기 전류를 반대방향으로 흐르게 한다. 이때 두 솔레 노이드 내부에 발생되는 자기장의 방향은 각각 반 대가 되며 두 솔레노이드 중심지점에서는 자기장 이 서로 상쇄되어 영이 되고, 중심에서 멀어질수 록 자기장은 증가한다.
자기장 H 와 자기장 구배 ∇H는 전류 와 거리I x 의 함수이다.
( ) ( )
( ) ( )
( )
( )
( )
( )
1/ 2 1/ 2
2 2
2 2
1/ 2 1/ 2
2 2
2 2
2 2
( , )
2 2 2 2
2 2 2 2
2 2 2 2 2 2
L x L x
H I x NI
L D L x D L x
L a x L a x
D L a x D L a x
⎡ + −
⎛ ⎞ ⎢
=⎜⎝ ⎟ ⎢⎠⎢ ⎣⎣ ⎡ + + ⎤⎦ + ⎡⎣ + − ⎤⎦
+ − − + ⎤⎥
− ⎡⎣ + + − ⎤⎦ − ⎡⎣ + − + ⎤⎦ ⎦⎥⎥
(4)
( ) ( )
( ) ( )
2
3 / 2 3 / 2
2 2
2 2
3 / 2 3 / 2
2 2
2 2
( , )
1 1
2 2
1 1
2 2 2 2
H I x dH dx NID
L D L x D L x
D L a x D L a x
∇ =
⎛ ⎞ ⎢⎡
=⎜⎝ ⎟ ⎢⎠ ⎡⎢ ⎣⎣ + + ⎤⎦ −⎡⎣ + − ⎤⎦
⎤⎥
+⎡⎣ + + − ⎤⎦ −⎡⎣ + − + ⎤⎦ ⎥⎥⎦
(5) 여기서, N(1000)은 코일회전 수, I 는 전류, D(0.04m) 는 코일직경, L(0.03m)은 코일길이를 나타낸다.
Table 1 HC-50 density : 1.39±0.02*(1000kg/m3) viscosity : 20±5 cp (25°C)
saturation magnetization : 37.7±1.6( kA/m) specific gravity : 1.39±0.02 (25°C) surface tension : 0.026±0.002 N/m (25°C) boiling point : 150~250°C (760mmHg)
Fig.2 와 Fig.3 은 전류크기에 따른 자기장 H 와 자기장 구배 ∇H 를 나타낸다.x가 a/2(x=0.03m)부 근에서 H 는 영이며, ∇H는 최대가 된다.
3.3 자기장 H 에 따른 자화 M
본 연구에 사용된 자성유체는 베이스유체가 등 유인 일본 타이오 공업사의 HC-50 으로 물성치는 Table 1 과 같다.
외부 자기장 H 에 따른 자성유체의 자화 M 은 실험적으로 측정되었으며, 측정된 M−H 곡선을 사용하여 솔레노이드의 자기장 H 에 따른 자성유 체의 자화 M 을 변위x값에 대하여 구할 수 있다.
Fig.4 는 자성유체 HC-50 의 H 값에 따른 자화 M 을 나타내는 M−H곡선이다.
Fig.5 는 솔레노이드의 자기장 H 값에 따른 내부 자성유체의 자화 M 을 나타내며, 자화 M 은 H 와 동일한 형태의 그래프를 갖는다.
Fig.6 은 변위x값에 따른M H∇ 을 나타내며, 물체 가 부양하기 위한 경계 값 α 보다 적은 값의 변 위는 전류 I 가 증가할수록 변위의 폭이 증가함을 할 수 있다. 다시 말해 전류가 증가할수록 물체가 움직일 수 있는 변위는 증가한다. 그림에서 α 와 의 교점은 두 지점으로 안정한 평형 점과 불안정 한 평형 점으로 구분지울수 있다. 먼저 평형 점에 서의 비자성체는 평형점방향으로 힘을 항상 받기 때문에 안정한 상태를 유지한다. 그러나 불안정한 평형 점에서의 비자성체는 평형 점에서 벗어나려 는 방향으로 힘을 항상받고있으므로 적은 왜란으 로도 평형 점을 이탈하고 만다.
불안정한 평형점이상에서부터 M H∇ 값이 영이 되 는 지점까지는 제어 가능한 구역으로 이 구역에서 의 힘 방향은 안정한 평형 점으로 복귀시키려는 방향으로 힘이 작용한다.
Fig.7 은 전류 값에 따른 평형 점의 거동을 나타낸 다. 전류 값이 증가할수록 안정한 평형 점은 a/2 지 점, 즉 두 솔레노이이드의 중심점으로 이동하며, 불안정 평형 점은 x=0 으로 이동한다. 결과적으로 전류 값이 증가할수록 비자성체가 움질일수있는 변위 량은 증가하게 된다.
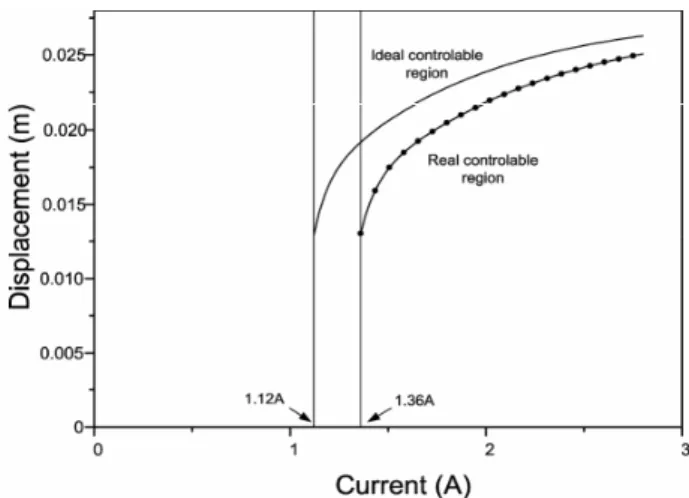
Fig.8 은 전류 값에 따른 제어가능지역을 나타낸다.
역시 전류 값이 증가할수록 제어가능지역은 증가 하게 된다.
Fig. 2 magnetic field intensity according to displacement in hollow solenoids
Fig. 3 magnetic field gradient according to displacement in hollow solenoids
Fig. 4 M-H curve(HC-50)
실제 솔레노이드를 제작하여 자기장 H 측정하였으 며, 이론적인 값과의 비교를 통하여 솔레노이드의 효율λ =82%를 구하였다. 이는 솔레노이드의 열로 인한 저항의 증가와 자속누설로 인하여 발생하는
Fig. 5 magnetization of magnetic fluid according to displacement in hollow solenoids
Fig.6 two equilibrium point and controllable region
Fig. 7 equilibrium point according to current 손실에 해당된다. 그림에서 이론적인 제어가능한 전류 범위는 1.12A 시작되나, 효율을 고려한 제어 가능 전류범위는 1.36A 에서부터 제어 가능하게 됨을 알 수 있다.
Fig. 8 controllable region according to current
4. 결 론
외부 자기장에 의하여 자성유체속에 담긴 비자성 체가 부양하기 위한 조건 M H∇ ≤α 를 도출하여
비자성체가 알루미늄인 경우( ) 필
요 되는
2700 / 3
O kg m
ρ =
H 를 구하여 솔레노이드를 설계하였다.
비자성체가 부양하기 위한 M H∇ 값을 솔레노이드 에 부가하여야 할 전류 값으로 나타내어 전류 값 을 조절함으로써 비자성체의 부양위치를 결정할 수 있게 되었다. 안정한 평형점과 불안정한 평형 점을 구분하여 제어가능지역을 고찰하였고 마지막 으로 실제 솔레노이드의 자기장을 측정하여 전류 값에 따른 이론적인 제어가능구역과 해석적인 제 어구간을 비교하였다.
향후 이러한 결과를 바탕으로 실제 시스템을 제작 하여 실험적으로 고찰하고 액추에이터로서의 동특 성 및 성능을 평가하고자 한다.
참고문헌
(1) Rosensweig, R.E., 1985, “Ferrohydrodynamics”, Cambridge University Press
(2) Jianqiang Mai, Takuyo Okada, Shuzo Oshima and Ryuichiro Yamane, 2001, “Oscillation of a Magnetically Levitated Diamagnetic Droplet Under a Vertical Magnetic Disturbance” JSME International Journal, vol.44, No1, 2001
(3) Seiichi Sudo, Kazutaka Ise and Toshiaki Ikohagi, 2002, “Dynamics of Magnetic Fluid-Permanent Magnet System Subjected to Vertical Vibration” Journal of
Intelligent Material Systems And Structures, Vol.13, July/August 2002