SURFACE RECONSTRUCTION BY MATCHING MULTI-RESOLUTION SATELLITE IMAGES
Chin-Jung Yang
[1], Liang-Chien Chen
[2], Wen-Chi Chang
[3][1]
Graduate Student, Department of Civil Engineering,
[2]
Professor, Center for Space and Remote Sensing Research
[3] Research assistant
, Center for Space and Remote Sensing Research National Central University, Taiwan
E-mail:
[1][email protected] ;
[2][email protected] ;
[3][email protected]ABSTRACT:
It is a practical way to generate digital surface models (DSMs) from stereoscopic satellite images. Since the resolution of satellites is improving, higher accuracy of the derived DSMs is expected. As the availability of high resolution satellites increases, the 3D reconstruction may be accomplished by matching multi-satellite image set.
Higher reliability of image matching may be achieved when more images are incorporated. However, we will encounter the problem that the target images may be with different resolutions. We, thus, propose an image matching procedure for multi-ray images with multi-resolution.
The proposed scheme includes four major steps: (1) determination of the ground coordinate system, (2) extraction of feature points, (3) multi-resolution images matching, and (4) DSM representation. The first step may be determination using ground control points (GCPs). For an area without GCPs, a relative system should be selected.
Currently, the high resolution satellites with advanced direct georeferencing capability may reach an accuracy of better than 5m without any GCPs. Thus, the relative coordinate system can be close to the absolute one. Ray tracing for the image feature point on the object point and the back projection of the object point to the search images will be performed interchangeably. In the image matching, we have to consider the target correlation coefficients when more than two images are treated. The final step is to derive the DSM through interpolation. The matching procedure is performed from coarse to fine using image pyramid.
The test area is Diaoyudao which is the largest island of Diaoyutai Islands. Test data includes one GeoEye-1 and two WorldView-1 images. Since no GCP is available, the validation examines disparities in a relative coordinate system.
KEY WORDS: High resolution satellite imagery, DSM generation, Image matching
1.INTRODUCTION
Generation of digital surface models (DSMs) may be accomplished by multi-source remotely sensed data, such as interferometric synthetic aperture radar (Burgmann et al, 2000), light detection and ranging (LIDAR), and images. Using the stereoscopic satellite images to generate the digital surface models (DSMs) is one of the practical ways. As the resolution of satellite is improving, the higher accuracy of the acquired DSMs is expected.
When the availability of high resolution satellites increases, the 3D position may be done by matching multi-satellite image sets. Higher reliability of image matching may be accomplished when more images are incorporated. In the past, one may use stereoscopic images from the same satellite to generate DSMs (Chen, et al. 1994; Rau & Chen, 1996). Using the multi-satellite images to generate DSMs could improve convergence geometry and accuracy (Zhang & Gruen, 2006).
However, we encounter the problem that the images may be with difference resolutions. We, thus, propose an image matching procedure for multi-ray images with multi-resolution satellite images.
Satellite images could provide much texture and spectral information. In order to execute image matching, we have to find the image features. There are three image
feature types: point, edge and polygon. Generally, the feature point matching may reach high accuracy. We, thus, use the feature point matching. There are many methods in feature point matching, such as normalized cross-correlation coefficient (NCC), least squares matching (LSM), and others. NCC calculates the correlation coefficient of the gray values between the images. LSM in basically is to minimize the sum of squares for gray values differences. In this investigation, we select the approach of geometrically constrained cross-correlation algorithm (CG
3) (Zhang & Gruen, 2006).
In image matching, we use orientation parameters to predict the area of interest. Actually, more and more satellite companies provide the Rational Polynomial Coefficients (RPCs) instead of the ephemeris data.
Although RFM lacks physical meaning, it has advantages of standardization for satellites and is easy to implement.
It has been proven that the accuracy of RFM is equivalent to RSM for high resolution satellite images, so RFM is the geometric fundamental in this study.
In this paper, we generate DSMs by matching multi-
satellite images. This test area is Diaoyudao which is the
largest island of Diaoyutai Islands. The island located at
25°44′39″N 123°28′26″E to 25.74417°N 123.47389°E
with an area of 4.3 km
2and the highest elevation about
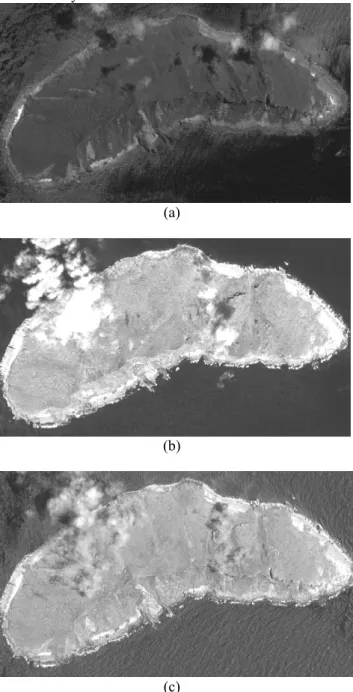
383 metres. Test images include one GeoEye-1 panchromatic image and two WorldView-1 panchromatic images. The test images and the related information are shown in Figure 1 and Table 1, respectively. In the test area, we have no GCPs to validate the experimental results. Thus, we validate the accuracy in a relative coordinate system.
(a)
(b)
(c)
Figure 1. The test image (a) GeoEye-1 (b) WorldView-1 (first) (c) WorldView-1 (second)
Table 1. The related information of test images Satellite
name GeoEye-1 WorldView-1 (first)
WorldView-1 (second) Date 2009/7/08 2009/7/16 2009/7/16
GSD 0.43m 0.69m 0.50m
Azimuth 213.5° 17.1° 95.3°
Elevation 77.3° 56.4° 86.2°
2.
GENERATION APPROACH
The proposed method includes four major steps: (1) determination of the ground coordinate system, (2) extraction of feature points, (3) multi-resolution images matching, and (4) DSM representation. The procedure is illustrated in Figure 2.
Figure 2. Workflow of the proposed method
2.1Determination of the ground coordinate system
There is no GCPs in this test area, so we need to determinate the relative coordinate system through the registration of multi-images images tie points (TPs).
Firstly, we select a reference image which has the closest vertical line of sight. The TPs in the reference image is projected to find the ground coordinates. These ground points can also be back projected to other slave images.
The elevation of a ground points is varied to reach an optimum projected location where disparities among images are the least. To compensate the systematic error, we calculate the affine transformation parameters to link the reference image. The affine transformation equations are shown in E.q.1
X = a
1×X’ + a
2×Y’ + a
3(1) Y = a
4×X’ + a
5×Y’ + a
6where X , Y = image coordinates of the TPs which are determined by measurement
X’, Y’ = image coordinates which are determined
by RFM
a
1~6= affine transformation parameters
2.2Extraction of feature points
A number of methods to automatically extract feature points are readily available, such as Moravec, Lü and target-defined ground operator TDGO (Chen & Lee, 1992). TDGO generates feature points rapidly with a favorable point distribution. Thus, we select TDGO to extract feature points.
2.3
Multi-resolution images matching
Since we have a multi-resolution image set, the best way is to start from the object space, as shown in Figure 3. By employing ray tracing for a feature point to the object space, we could obtain the initial ground point. We set a grid on the initial ground point, and back project the grid points to slave images. These image points are adjusted by the affine transformation parameters in respective slave images. By assigning an elevation range, we may predict the matching area. The grey value of the search window is calculated by resampling the predicted area. We iteratively modify the height value and compute the weighted summation of NCC values of all slave images. The weighted NCC equation is shown E.q.2. The elevation of ground points is estimated by the calculation of the highest weighted NCC in elevation range.
Figure 3. Multiple image matching with the GC3 algorithm (Zhang & Gruen, 2006)
Weighted NCC = ∑ ∑= ( )
×
×
ni
i i
i
W NCC p Z
W
1 0,
1 (2)
where W
i= weight of slave image n = number of slave image p = matching point
Z = elevation of matching point
2.4DSM representation
The new DSM is represented in raster form after the interpolation of 3D discrete points with the Kriging method. The matching procedure is performed from coarse to fine using image pyramid. In the beginning,
STRM (Shuttle Radar Topography Mission) is the initial DSM. And then the new DSM will be treated as the initial DSM in the next iteration. This iteration proceeds until the disparity is small enough.
3.
RESULTS
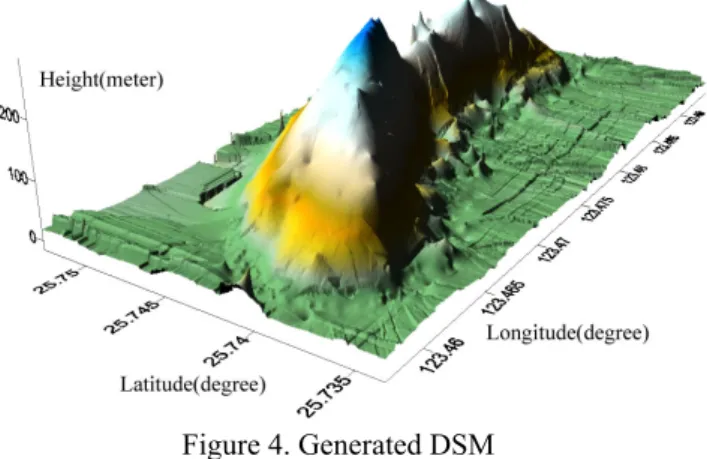
Following the proposed scheme, we generate a DSM with the 5 meter grid spacing. The spacing is selected according to the distribution of the successfully matched points in the test area. The generated DSM is shown in Figure 4.
Figure 4. Generated DSM
We validate the final DSM accuracy by comparisons of elevation difference between the generated DSM and the set by manual measurements. The elevation error is shown in Figure 5. The root mean square error of the elevation is 2.97meters with the largest error of 6.66m.
The largest error is caused by unreliable matching due to cloud cover and tree top variations.
Figure 5. Elevation error vector of TPs
4.
CONCLUSION
This paper proposes an image matching procedure in the object space for multi-resolution satellite images.
Preliminary results indicate that the proposed scheme could generate DSM efficiently. The result shows that the generated DSM may reach 3 meter accuracy in elevation.
It is observed that the test area is covered by dense trees
that could produce unreliable matching. Some points with cloud cover could even deteriorate the matching quality.
We, thus, suggest to use more images in the matching procedure to improve the accuracy in the future.
5.