碩 士 學 位 論 文
W CDM A를 기반으로 한
IM T - 2000시스템의 무선망 엔지니어링 툴의 개발
Dev elopm en t of a W ir ele s s E n g in eer in g T ool f or IM T - 2000 S y st em B a s ed on W CDMA
國 民 大 學 校 大 學 院
電 子 工 學 科
鄭 會 榮
2 0 0 0
W CDM A를 기반으로 한
IM T - 2000시스템의 무선망 엔지니어링 툴의 개발
Dev elopm en t of a W ir ele s s E n g in eer in g T ool f or IM T - 2000 S y st em B a s ed on W CDMA
指 導 敎 授 成 榮 洛
이 論 文 을 碩 士 學 位 請 求 論 文 으로 提 出 함
2000年 12月 日
國 民 大 學 校 大 學 院
電 子 工 學 科
鄭 會 榮
2 0 0 0
鄭 會 榮 의
碩 士 學 位 請 求 論 文 을 認 准 함.
2000年 12月 日
審 査 委 員 長 林 在 鳳 印
審 査 委 員 吳 夏 嶺 印
審 査 委 員 成 榮 洛 印
國 民 大 學 校 大 學 院
목 차
목 차 i
요 약 iii
1 . 서 론 1
2 . 관 련 이 론 및 측 정 장 비 2
2.1. W CDM A (W ideb an d Code Div ision M ultiple A cces s ) 2
2.1.1. W CDM A 시스템의 구성 2
2.1.2. W CDM A 시스템의 특성 3
2.1.3. 응용 4
2.3. 스펙트럼 분석기 6
2.4. GP IB (Gen er al P u r pose Int er face Bu s ) 6
3 . 시 스 템 요 구 사 항 8
3.1. 실시간 측정 기능 9
3.1.1. 필드 데이터 측정 9
3.1.2. GP S 데이터 측정 9
3.1.3. 측정 장비 제어 9
3.1.4. 데이터 저장 10
3.2. 데이터 표출 기능 10
3.2.1. 데이터의 실시간 표출 10
3.2.2. GP S 정보 표출 10
3.2.3. 지도 표출 10
3.2.4. 파일에 저장된 데이터 표출 11
3.3. 환경 설정 기능 11
3.3.1. 환경 설정 11
3.3.2. 지도 설정 11
3.3.3. 색 설정 11
4 . 시 스 템 설 계 12
4.1. 필드 데이터 수신부 14
4.2. GP S 데이터 수신부 16
4.3. 데이터 처리 및 표출부 17
5 . 시 스 템 구 현 20
참 고 문 헌 33
A b s t ra c t 34
요 약
W CDM A 필드 데이터 측정 시스템은 GP S (Global P ositioning Sy stem ) 수신기를 탑재하여, 시스템이 현재 측정하고 있는 위치 및 시간을 자동적으로 감지할 수 있으므로 W CDM A 필드 데이터의 지역적 분포를 정확하게 분석할 수 있다. 본 시스템에서는 지도 자료를 사용하여 측정위치의 표시는 물론 각 지역에서의 W CDM A 필드 데이터 분포를 한눈에 알아볼 수 있는 정보를 제공하게 된다. 지도 정보를 얻는데 있어서 벡터 지도와 래스터 지도를 선택하여 표출할 수 있다. 필드 데이터의 표출은 지도상에서는 물론이고 데이터의 변화를 한눈에 관찰할 수 있도록 그래프 형식으로 표현하였다. 실제 필드에서 수집하여 측정한 데이터는 파일로 저장하여 추후에 측정했던 데이터를 자세히 분석할 수 있다. W CDM A 필드 데이터 측정 시스템은 GP S 수신기와 스펙트럼 분석기가 연결되어 필드 상에서 필드 데이터들의 분포를 한눈에 알 수 있다. 그러나 현재 상황에선 W CDM A용 기지국이 실제 필드에 흔치 않으므로 별도의 W CDM A 신호 발생기를 스펙트럼 분석기에 연결하여 실제 환경을 모사하였다.
1. 서 론
차세대 이동 통신 시스템인 W CDM A를 기반으로 한 IM T - 2000은 기존의 여러 종류의 서비스를 제공하기 위하여 형성되어 있는 다양한 이동통신망 및 서비스들을 하나로 통합하여 이를 통해 가능한 모든 이동통신서비스가 제공될 수 있는 시스템이다. 또한, 다양한 형태의 무선접속 및 대용량의 가입자 수용능력을 이용하여 멀티미디어 서비스 및 다양한 환경에 대처 할 수 있는 능력을 갖춤으로써 가입자에게 종합적인 이동통신서비스를 제공하는 것을 목표로 하고 있다[1]. 아울러, 서비스측면에서는 음성과 2M bps까지의 전송속도를 갖는 데이터, 영상 등의 멀티미디어 통신 및 국제 로밍 서비스를 제공하고, 네트워크 측면에서는 고속의 교환기를 기반으로 한 유무선 통합시스템을 목표로 하고 있다.
동시에 단말기는 작고 가벼운 휴대용이면서 매크로셀, 마이크로셀, 피코셀, 도시, 도시근교, 산간 지방 등 다양한 무선 환경 하에서도 신뢰성 있는 동작을 보장하여야 한다. 바꾸어 말하면 차세대 무선 통신시스템은 고품질, 서비스영역의 확대, 그리고 전력과 대역폭에서의 효율의 증가가 동시에 요구된다. 이러한 요구사항들을 충족시키고 지속적으로 유지하기 위해서는 경제성을 고려한 무선 기지국의 합리적인 유지・보수가 절실히 요구된다. 이를 위해 차량에 GP S (Global P osit ionin g S y st em ) 수신기와 W CDM A 필드 데이터 측정 장비를 탑재하고 측정 지역을 돌아다니며 실시간으로 데이터를 측정하고 수집하는 장비의 개발이 필요하다.
이와 같은 이유로, 본 논문에서는 W CDM A 필드 데이터 측정 시스템을 개발한다. 개발된 시스템은 실시간으로 W CDM A 필드 데이터를 측정하고 지도상에 출력하는 기능 및 측정 데이터의 재현(playback ) 기능을 갖는다.
2. 관련 이론 및 측정 장비
2. 1. W CDMA
(W ideb an d Code Div ision Mult iple A cce s s ) W CDM A 시스템은 높은 음성 품질을 가지고 이동성을 보장하며 차세대 무선 통신 시스템에 응용될 수 있다. 음성 코딩을 위해서는 32kbps A DP CM (A dapt iv e Differ ent ial P ulse Code M odulat ion )을 채택하였고 시속 100km 정도의 속도로 움직이더라도 통화가 가능하다[2].2.1.1. W CDMA 시스템의 구성
1) F or w ar d Link
송신기는 음성 부호화기, Conv olut ion al 부호화기, Int er leav er , M u lt iplex er , 무선 주파수 변조기로 구성된다. 수신기는 음성 복호화기, V it er bi 복호화기, Deint er leav er , Rak e 수신기, 무선 주파수 복조기로 구 성된다. F or w ar d Link에서 기지국은 기지국내의 모든 단말기로 데이터 를 전송하며 따라서 동기화가 필요하다. W CDM A 시스템에서는 W alsh Ort h og on al Codes를 사용하여 간섭이 생기지 않으며 P N Code는 신호 에 지연이 생기더라도 Corr elation을 감소시켜 준다.
2) R ev er se Link
송신기는 음성 부호화기, Conv olut ion al 부호화기, Int er leav er , M u lt iplex er , 무선 주파수 변조기로 구성된다. 수신기는 음성 복호화기, V it er bi 복호화기, Deint erleav er , 간섭 해소 시스템(ICS :Int erfer en ce Can celer S y st em ), 무선 주파수 복조기로 구성된다. W CDM A 시스템은 많은 가입자를 수용할 수 있으며 Lon g P N Code를 사용하여 다른 가입 자로부터의 간섭을 억제한다.
2.1.2. W CDMA 시스템의 특성
대역 확산의 방식은 DS (Dir ect S equence) 방식이 사용되는데 주파수 사용 효율이 높고, 간섭에 강하며 페이딩(F ading )에 강하다는 장점이 있다.
그 외 W CDM A 시스템의 특성은 아래와 같은 것이 있다.
・P ath Div er sity Receiv in g
・에러 조정 (Error Contr ol)
・간섭 상쇄 시스템 (Int erfer en ce Can celer Sy stem )
・견고한 음성 부호화 (Robu st V oice En coding )
W CDM A 시스템이 페이딩(F ading )에 강한 것은 P ow er Contr ol, P ath Div er sity , E r r or Cont r ol에 기인한 것이며 ICS 로 인하여 큰 용량을 가지게 된다. 또한 뛰어난 음성 코딩 방식으로 유선에 가까운 높은 음성 품질을 얻 을 수 있다.
1) P ath Div er sit y
W CDM A 시스템에는 Rak e Receiv er 가 사용되는데 다음과 같은 세 가지 기능을 가지고 있다.
・대역 확산 신호의 동기화된 샘플링
・다중 경로 지연에 따른 Correlation Detection
・채널 반사에 따른 W eightin g Div er sity
2) 에러 조정 (E r r or Con t r ol)
F a din g 채널에서 대부분의 에러는 수신된 신호가 낮을 때 발생하며 에러는 Bur st의 형태로 나타난다. 이 Bur st Err or가 Conv olutional Code 에 유입되면 송신 신호에서 에러가 발생할 확률이 높아지므로 이러한 현상을 방지하기 위해 에어 패턴을 랜덤하게 하는 기능이 추가된다.
3 ) 간섭 상쇄 시스템 (ICS :In t erfer en ce Can celer S y st em )
W CDM A 의 R ev er se Lin k에는 ICS 가 사용되며 ICS 는 기지국에 설치 된다. ICS는 무선 채널 평가, 파일럿 신호 감쇄, 간섭 감쇄로 구성된다.
2.1.3. 응용
P CS 는 L ow T ier 시스템과 H ig h T ier 시스템으로 구분될 수 있으며 그 특성은 다음과 같다.
・Low T ier 시스템 : 고밀도 지역, 이동성에 제한이 있음, 고속 데이터 지원, PH S (P er s on al H andyph on e Sy st em )가 대표적임
・High T ier 시스템 : 고속 이동성 지원, 저속 데이터, PDC (P er sonal Dig it al Cellular )가 대표적임
W CDM A 시스템은 고속 이동성을 지원하고 음성 품질 또한 높으며 대역 확산 방식을 사용하여 많은 양의 데이터 전송에도 적합하므로 다양한 방법으 로 응용될 수 있다. W CDM A의 음성 품질은 거의 유선 수준에 가깝고 N CDM A 보다 더 많은 용량을 가진다.
2.2. GP S (Glob al P osit ion in g S y st em )
GP S 가 어떠한 원리로 작동되는가를 이해하는 것은 개념적으로 매우 단순하다. 근본적으로 GP S 는 삼각측량의 원리를 사용하는데 전형적인 삼각측량에서는 알려지지 않은 지점의 위치가 그 점을 제외한 두 각의 크기와 그 사이 변의 길이를 측정함으로 결정되는데 반해 GP S에서는 알고싶은 점을 사이에 두고있는 두 변의 길이를 측정함으로 미지의 점의 위치를 결정한다는
것이 고전적인 삼각측량과의 차이점이라 할 수 있겠다. 인공위성으로부터 수신기까지의 거리는 각 위성에서 발생시키는 부호 신호의 발생 시점과 수신 시점의 시간 차이를 측정한 다음 여기에 빛의 속도를 곱하여 계산한다. 실제로 위성의 위치를 기준으로 수신기의 위치를 결정하기 위해서는 이 거리 자료 이외에도 위성의 정확한 위치를 알아야 하는데 이 위성의 위치를 계산하는데는 GP S 위성으로부터 전송되는 궤도력을 사용한다.
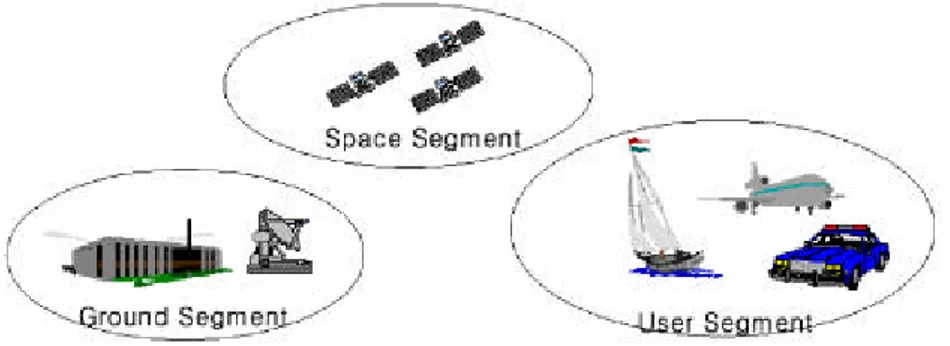
GP S 의 구성을 알아보면, [그림 1]과 같이 위성 부분 (S p ace S egm en t ), 통제 부분(Contr ol S egm en t ), 사용자 부분(U ser S egm en t )으로 나눌 수 있다.
사용되는 GP S 위성은 총 24개가 있는데 그 중 세개는 예비위성으로 포함되어 있다. 이들은 고도 20,000Km 에서 적도면에 대해 55도의 기울기로 6개의 궤도를 동일한 간격으로 분포하면서 12시간주기로 지구를 선회한다. 지상에 있는 기지국은 5개가 있으며, 이중 한 기지국이 M ast er contr ol m onitor 와 M onitor S t at ion 기능을 수행하는 기지국과 4개의 M on it or S t at ion 으로 이루어져 있다.
위성에서 보내져오는 Sign al로 x , y , z의 3차원 정보와 시간을 계산하기 위해선 최소4개의 위성이 필요하게 되는데, 이 위성들로부터 받은 신호를 위치, 속도, 그리고 시간으로 변환해 주는 것이 GP S 수신기의 역할이다.
그림 1 GP S 시스템의 구성도
2.3 . 스펙트럼 분석기
스펙트럼 분석기는 시스템의 성능을 완전히 이해하기 위하여
주파수(fr equen cy ) 도메인에 대하여 강도(am plitu de)를 측정하는 형태로 신호(signal)를 측정하는 기기이다. 주파수 영역에서 측정하면서 주파수를 선택해서 측정을 할 수 있으며, 측정 중 잡음을 줄일 수 있는 장점이 있다. 또한, 많은 원격 통신(T elecom m unication )에서는 F DM A (F r equen cy Division M ultiple A cces s )나 F DM (F r equ en cy Div ision M u lt iplex in g )을 사용하는데 이런 형태의 신호를 사용하는 시스템은 주파수 영역에서만 측정이 가능하다. 스펙트럼 분석기로 가장 많이 측정하는 것은 주파수 변조(m odulation ), 왜곡(dist ortion ), 잡음(n oise)등이다[3].
스펙트럼 분석기는 그 자체만으로도 사용이 가능하나 GP IB나 RS - 232 인터페이스를 이용하여 컴퓨터와 연결하여 사용할 수 있다. 컴퓨터와 연결이 되면 필요로 하는 작업을 인터페이스를 통해 명령어를 전달하고 측정된 데이터를 전달받을 수 있다[4][5].
2.4 . GP IB (Gen er al P u r pose In t er f ace B u s )
GP IB 규격의 원천은 HP 사의 삼선식 핸드셰이크 방법에서 유래한다. 이 회사 내의 규격을 IE C (Int ernation al Electr ot echnical Com m is sion )와 IE E E (In st it ut e of E lectr ical an d E lect r onics E n g in eer s )에서 국제적 규격으로 정한 인터페이스 규격이다. GPIB가 가지고 있는 여러 장점 때문에 계측 공업분야에서 널리 활용 되고 있다[6].
표 1 GPIB의 전기적 규격
항 목 규 격
최대 케이블 길이 20m 이하
최대 전송속도 1M by t e/ s ec
접속최대 기기 수 15대
접속 형식 3선 핸드셰이크
신호 논리(부논리) T RUE : L ow (0,8V 이하) F A L S E : H ig h (2.0V 이상) 데이터 전송형식 8 Bit P ar allel
커넥터 규격은 IEEE - 488 규격(24핀) 과 IE C 규격(25핀) 이 있다. 국내 계측제어 장치는 [그림 2]와 같은 IE EE - 488 규격을 사용하고 있다.
그림 2 GPIB 핀 규격
3. 시스템 요구 사항
[그림 3]은 본 논문에서 제안하는 W CDM A 필드 데이터 측정 시스템의 하드웨어적인 구성을 나타낸 것이다. 시스템은 노트북 P C 상에서 구현되며 GP S 수신기와 스펙트럼 분석기와 연결된다. 제안된 시스템에서는 GP S 수신기를 통하여 시스템의 현재 위치 및 현재 시간을 얻을 수 있으므로 W CDM A 필드 데이터의 지역적 분포를 정확하게 분석할 수 있다. 또한 측정의 편의를 위하여 본 시스템에서는 지도 자료를 사용하여 측정 위치의 표시는 물론 각 지역에서의 W CDM A 필드 데이터 분포를 한눈에 알아볼 수 있도록 한다. 측정된 데이터는 화면에 표출되며 또한 파일로 저장되어 추후에 재현할 수 있다.
제안된 시스템이 실제 용도로 사용되기 위해선 기지국에서 송신한 W CDM A 신호를 스펙트럼 분석기 등을 통하여 측정하여야 한다. 그러나 현재 W CDM A용 기지국의 수가 매우 적으므로 본 논문에서는 W CDM A 기지국 대신에 W CDM A 신호 발생기를 연결하여 실제 환경을 모사하였다.
그림 3 시스템 하드웨어 구성도
3. 1. 실시간 측정 기능
본 시스템에서 가장 중요한 요구 사항은 정해진 시간 간격으로 데이터의 측정이 이루어져야 한다는 것이다. 그러나 그 어떠한 경우에도 데이터 측정을 빠트려서는 안 된다. 측정해야 할 데이터는 필드 데이터와 GP S 데이터이다.
3.1.1. 필드 데이터 측정
스펙트럼 분석기로부터 무선망 필드 데이터를 얻는다. 스펙트럼 분석기는 W CDM A 파라미터는 물론 CDM A 파라미터도 측정 가능하다. 각 측정 파라미터를 얻어오는 모드에 따라 측정해야할 파라미터를 사용자가 선택하여 필드 데이터를 측정한다. 측정 모드에 따른 측정 파라미터의 정보는 저장된 파일의 헤더에 추가하여 추후에 측정 결과 분석 때 사용자가 측정파일의 측정 파라미터 정보를 쉽게 알 수 있게 한다.
3.1.2. GP S 데이터 측정
본 시스템을 탑재한 차량의 이동 경로와 필드 데이터의 분포를 분석하기 위하여 GP S 데이터를 측정한다. GP S 데이터는 각 필드 데이터와 매칭 하여 표출하고 저장한다. GP S 데이터가 올바르지 않은 값이 측정되어 들어올 때 이를 감지할 수 있게 한다.
3.1.3. 측정 장비 제어
본 시스템에서는 스펙트럼 분석기를 통하여 분석기에서 수집하여 계산되어진 필드 데이터의 측정값들은 얻게 된다. 이와 같이 스펙트럼 분석기와의 데이터 송수신을 위해서는 스펙트럼 분석기의 설정 값이나 커맨드를 본 시스템에서 제어 할 수 있어야 한다.
3.1.4. 데이터 저장
측정된 데이터들을 저장하여 후에 다시 재생하여 분석할 수 있는 기능을 가진다. 데이터의 저장은 사용자의 설정에 따라 필드 데이터와 GP S 데이터를 매칭 하여 저장하거나 또는 필드 데이터와 GP S 데이터중 한가지만 선택하여 저장할 수 있다. 본 시스템은 측정 결과 값의 저장이 무엇보다 중요하므로 측정 데이터의 누락없이 저장되어야 한다.
3.2. 데이터 표출 기능 3.2.1. 데이터의 실시간 표출
필드 데이터 측정 시 즉시 현재의 위치를 파악하여, 그 위치에서 측정된 데이터를 지도화면에 데이터 값에 따라 사용자나 시스템이 정해 놓은 색의 도형으로 보여준다. 그리고 그래프와 수치적인 값으로 표출한다.
3.2.2. GP S 정보 표출
필드 데이터 측정 시에 GP S 수신기를 사용하여 현 위치를 파악하고 화면상의 창에 위도, 경도 형태로 표시한다. 또한 현재 사용하고 있는 위성의 상태도 표시한다. 현 위치 외에 속도, 방향, GP S 시간 등의 정보도 수치 혹은 그림으로 화면에 표시된다.
3.2.3. 지도 표출
벡터 지도 데이터를 읽어서 화면에 표출한다. 이때 지도의 축척은 다단계로 조정되며 현 위치가 화면에서 벗어날 경우 화면이 자동적으로 스크롤 되도록 한다. 또한 GP S 수신기로부터 얻어진 현재위치에 따라 해당 지도 데이터 파일을 자동적으로 읽어 들여 지도 화면에 표출한다.
또한, 벡터 지도는 제작과정이 어렵기 때문에 일반 종이 지도를 스캔하여 만든 래스터 지도 위에 GP S 데이터와 필드 데이터를 표출 할 수 있게 한다.
GP S 수신기로부터 측정된 데이터로 차량의 이동 경로를 래스터 지도에 표출하기 위해서 종이 지도를 스캔한 비트맵 파일의 픽셀 좌표와 일치하는 실제 위경도 좌표를 매핑할 수 있는 툴이 요구된다.
3.2.4. 파일에 저장된 데이터 표출
측정된 데이터를 비교・분석하기 위하여 파일로 저장된 데이터를 읽어서 지도화면에 표출한다.
3.3 . 환경 설정 기능 3.3.1. 환경 설정
데이터의 측정에 필요한 환경 값들을 설정할 수 있도록 한다. 사용자의 편의를 위하여 설정된 환경 파일의 값을 읽어들일 수 있으며 또한 변경된 설정 값을 재사용하기 위하여 새로운 환경 파일에 저장하는 기능을 가진다.
3.3.2. 지도 설정
지도상의 요소(도로, 건물, 공원/ 녹지, 강/ 하천, 경계선) 중에서 지도 화면에 표출할 것을 선택한다.
3.3.3. 색 설정
측정된 필드 데이터 값을 지도화면 상에 나타내게 된다. 이때 사용되는 데이터 값의 범위에 따른 색을 지정한다. 이때 데이터 값의 범위와 색은 사용자의 요구에 따라 임의의 간격으로 설정할 수 있다.
4. 시스템 설계
본 절에서는 앞에서 제시된 요구사항들을 만족하는 W CDM A 측정 시스템을 설계한다. 본 시스템은 크게 사용자 환경부, 데이터 측정부, 데이터 표출부로 이루어져 있다. [그림 4]는 소프트웨어적인 구성과 이들 간의 제어 및 데이터 흐름이다.
그림 4 시스템 설계
사용자 환경부는 입력 장치를 통하여 측정 시작, 정지, 종료 등의 사용자 명령을 받아서 시스템의 나머지 부분으로 전달하는 기능을 갖는다. 또한, 스펙트럼 설정, GP S 수신기 설정, 기지국 설정, 데이터 레벨 설정 등의 환경 변수 설정에 관련된 기능들을 제공한다.
데이터 측정부는 스펙트럼 분석기와 GP S 수신기로부터 필드 데이터와 위경도 및 시간 데이터를 측정한다. 스펙트럼 분석기와의 통신은 GP IB 프로토콜을 이용하며, GP S 수신기와는 RS - 232C로 통신한다. 데이터 측정부는 스펙트럼 분석기에서 데이터를 얻어오는 쓰레드와 GP S 수신기와 통신을 담당하는 쓰레드로 나누어 설계하였다. 그리고, 이 두 측정 쓰레드에 가장 높은 우선 순위를 부여하였다[7].
데이터 표출부는 데이터 처리부와 벡터지도 표출부로 구성되어 진다. 데이터 처리부는 데이터 측정부에서 측정된 데이터를 여러 형태로 가공하고 파일로 저장하는 역할을 한다. 측정 데이터를 시간 축 기준으로 또는 주파수 축 기준으로 그래프로 나타내고, 통계 값을 계산하여 표출하는 역할도 담당한다.
또한 벡터지도 표출부에 측정된 데이터를 공급하는 역할을 담당한다. 벡터지도 표출부는 벡터 지도를 화면에 출력하고 거기에 측정 데이터를 표시하는 기능을 한다. 앞서 언급하였듯이 현재 위치가 벡터 지도 화면에서 벗어날 경우 지도 화면이 자동적으로 스크롤 되도록 하며 사용자의 요구에 의해서도 지도를 확대, 축소, 스크롤 되어야 한다.
[표 2]와 같이 각 부분을 독립적인 쓰레드로 구현하여 각 어떤 작업이 오랜 시간 동작하여 다른 작업이 쉬어야 하는 경우를 없이 독립적인 구동이 가능하게 하였다. 그리고 그리고 데이터 측정부에 가장 높은 우선 순위가 부여되었다.
이것은 요구 사항에서 언급한 정해진 시간 간격으로 빠짐없이 데이터를 측정 하는 가장 핵심적인 기능을 제공하기 위함이다.
4. 1. 필드 데이터 수신부
스펙트럼 분석기와 통신을 담당하는 cla s s로서 일정시간마다 스펙트럼 분석기에서 여러 정보를 얻어오는 쓰레드가 있다.
스펙트럼 분석기와의 통신은 GPIB 카드를 통해서 하게 되며 그에 대한 규격은 IE E E 488.2를 따른다. 그 인터페이스를 위한 모듈은 N at ion al In st r um en t ( NI ) 사에서 DE CL - 32.H와 GPIB - 32.OBJ 파일을 제공하며, 그에 대한 매뉴얼도 제공된다.
측정되어지는 필드데이터 크게 W CDM A 데이터와 CDM A 데이터로 나눌 수 있다. 다음은 모드에 따른 측정파라미터의 구조이다.
표 2 부분별 쓰레드 설정
쓰레드 명 해당 부분 우선 순위
S A T hr ead 필드 데이터 수신부 H IGHE S T
GP S T hr ead GP S 데이터 수신부 H IGH
U IT hr ead 사용자 환경부, 데이터 처리부 N ORM A L
M apT h r ead 백터지도 처리부 L OW E S T
W CDM A 데이터 클래스 cl a s s CWCDMADa t a
{
publ i c :
/ / adj acent channel power doubl e AcpTxPwr ;
doubl e AcpLow2 ; doubl e AcpLow1 ; doubl e AcpHi gh1 ; doubl e AcpHi gh2 ;
/ / occupi ed f r equency bandwi dt h doubl e Of bOccBW;
doubl e Of bULi mi t ; doubl e Of bLLi mi t ; doubl e Of bCent er ;
/ / code doma i n power doubl e CdpFr eqEr r or ; doubl e CdpPeakEr r or ; doubl e CdpCodeNum;
doubl e CdpCodeDoma i nPwr [ 64 ] ; doubl e CdpCodeDoma i nEr r or [ 64 ] ; doubl e CdpWavef or mQual i t y [ 64 ] ; } ;
CDM A 데이터 클래스 cl a s s CCDMADa t a
{
publ i c :
i nt Pwr Tbl [501 ] ; doubl e dbl Fr eqCount ; doubl e dbl AbsNoi s e ; doubl e dbl CNRat i o ; doubl e dbl ChPwr 1 ; doubl e dbl ChPwr 2 ; } ;
4.2. GP S 데이터 수신부
GP S 수신기와의 통신을 통한 위도, 경도, 날짜, 시간 등의 값을 얻어온다.
기본적으로 직렬 인터페이스를 통해 P C (notebook )와의 통신이 이루어진다. 직렬 통신을 담당하는 CS erialComm cla s s를 상속받은 CGp s clas s를 통해 작업을 하고, GP S dat a는 CGpsData라는 clas s를 통해 관리한다.
CS er ialCom m cla s s에서는 직렬 통신에서 데이터를 받을 수 있도록 포트 감시 쓰레드를 생성해 데이터가 들어오는지 감시한다.
GP S 데이터 클래스 cl a s s CGpsDat a
{
publ i c :
i nt nGpsHour ; i nt nGpsMi n ; i nt nGpsSec ; doubl e dLa t i t ude ; doubl e dLongi t ude ; i nt nSpeed ; i nt nDi r ec t i on ; } ;
4.3 . 데이터 처리 및 표출부
측정 데이터를 저장하는데 있어서 파일 헤더에 다음과 같은 정보를 추가한다.
파일 헤더 정보 t ypedef s t r uc t {
i nt nHour ; i nt nMi n ; i nt nSec ; } Ti meSt r uc t ;
t ypedef s t r uc t {
char cHeader Name [ 5 ] ; / / 측정 파일인지 검사 Ti meSt r uc t sSt ar t Ti me ;
Ti meSt r uc t sEndTi me ; char cAut hor [21 ] ; char cNot e [ 101 ] ; BYTE t Loggi ngKi nd ; } ;
측정 파라미터 선택 정보에는 GP S 데이터와 스펙트럼 분석기로부터의 데이터의 수신여부 그리고 모드 변환에 따른 파라미터 값의 정보를 가지게 된다.
본 시스템에서 사용되는 지도는 M icr oStation의 포맷으로 이루어져 있고, 프로그램에서는 측정된 데이터의 위경도를 참조하여 알맞은 지도를 자동으로 로드한다. 현재 본 시스템에서 사용하는 지도는 전국지도와 서울지역 그리고 부산지역의 지도로 이루어져있고 각 지역마다 타일형식으로 분할되어 있다.
데이터 표현을 그래프 적으로 원활하게 하기 위해서 OlectraCh art를 사용해서 데이터를 재생하거나 통계 처리를 수행한다[8]. Olectr aCh art의 경우 dll을 이용하는 방법과 OCX를 사용하는 방법이 있는데 본 논문에서는 dll을 이용하는 방법으로 그래프를 구현한다.
일반 종이 지도를 스캔한 파일에 위경도 좌표를 설정하기 위해서는 픽셀 좌표와 대응하는 실제 위경도 좌표를 매핑할 수 있어야 한다. 아래와 같은 정보를 사용자가 세 점 이상 설정하여 파일로 저장 후 비트맵 파일이 위경도 정보를 갖게 한다.
픽셀 좌표와 위경도 좌표 매핑 구조체 t ypedef s t r uc t t agTi cPnt {
doubl e PHI ; / / 위도 doubl e LAM ; / / 경도
doubl e X ; / / 이미지의 X 좌표값 doubl e Y ; / / 이미지의 Y 좌표값 } ;
5. 시스템 구현
제안된 시스템은 주로 마이크로소프트 윈도우즈 2000에서 개발하였으나, 윈도우즈 98에서도 동작할 수 있도록 구현되었다. 컴파일러는 Visu al C++ 6.0을 사용하였다. 앞서 설계된 [그림 4]의 각각의 부분들은 독립된 쓰레드로 구현되었다. 그리고 데이터 측정부에 가장 높은 우선 순위가 부여되었다.
이것은 요구 사항에서 언급한 정해진 시간 간격으로 빠짐없이 데이터를 측정 하는 가장 핵심적인 기능을 제공하기 위함이다.
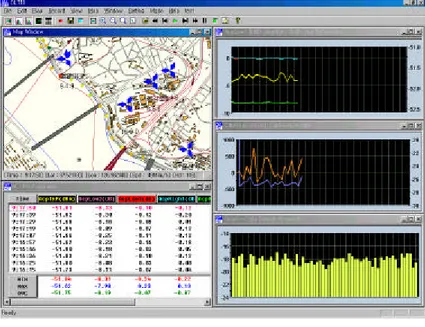
본 시스템은 W CDM A 측정 모드 시스템과 CDM A 측정 모드 시스템으로 이루어져 있다. [그림 5]와 [그림 6]은 각각 W CDM A 및 CDM A 측정 모드로 구현된 전체 시스템의 그림이다. 그림을 살펴보면 왼쪽 상단의 창에 지도 정보가 나타나고, 측정 데이터와 기지국이 표시된다. 지도 창 아래에는 측정된 데이터의 통계 값을 나타내는 창을 볼 수 있다. 이들 창의 우측에는 데이터의 시간적 순서진행과 주파수 파형의 그래프를 나타내는 창을 볼 수 있다. 본 시스템에서 구현한 벡터지도는 많은 메모리를 차지하여 처리하는데 소요되는 시간이 길다. 그래서 속도 향상을 위해서 벡터지도를 직접 화면에 그리는 대신 메모리상의 비트맵에 그린 후 한번에 화면에 표시하는 방식을 사용하였다. 이 방식을 통하여 입출력을 위한 대기 시간을 크게 줄였다.
그림 5 W CDM A 모드
그림 6 CDM A 모드
지도 창에서는 필드 데이터 값을 지도화면 상에 나타낼 때 사용되는 필드 데이터 값의 범위에 따른 색을 지정한다. 이때 필드 데이터 값의 범위는 사용자의 요구에 따라 임의의 간격으로 설정할 수 있다. [그림 7]은 사용자의 환경에 맞게 레벨 값의 범위와 색을 선택하는 그림이다.
그림 7 데이터 레벨 설정
[그림 8]의 벡터 지도 창에서는 GP S 데이터로부터의 위치 값과 측정 데이터를 지도상에서 이동해 가면 표시한다. 그래프 창에서는 측정 데이터를 그래픽 형식으로 나타낸다. 측정 데이터의 수치는 실시간으로 나타내고 측정데이터 중 최고 값과 최하 값, 그리고 측정값의 평균을 구한다.
벡터지도는 많은 메모리를 차지하고 처리하는데 많은 시간이 걸리기 때문에 주의를 필요로 한다. 벡터지도의 속도 향상을 위해서 벡터지도를 일단 메모리상의 비트맵에 그린 후 그것을 한번에 화면에 표시하는 방식을 택하였다[9].
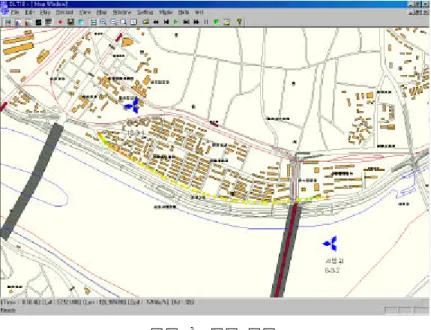
그림 8 벡터 지도
그림 9 래스터 지도
[그림 9]는 래스터 지도 창이다. [그림 10]은 사용자가 처음 비트맵 파일을 로드하기 전에 이미지 픽셀 좌표와 실제 위경도 좌표를 매핑하는 툴을 이용하여 설정하는 그림이다. 본 시스템에서는 일반 지도를 스캔한 파일에 위경도 정보를 설정하기 위해서 [그림 10]과 같은 툴을 이용한다. 다음 소스는 이 툴로 위경도 정보를 설정 후 래스터 지도 위에 데이터를 표출하기 위해 실제 위경도 좌표에 대응하는 이미지 픽셀 좌표를 얻는 간단한 예제이다. 이 예제에서는 강제로 위경도 좌표와 픽셀 좌표를 소스에서 지정하였으나 실제 본 시스템에서는 [그림 10]의 툴을 사용하여 위경도 정보와 픽셀 좌표를 설정하여 래스터 지도 위에 데이터를 표출한다.
그림 10 래스터 지도의 위경도 설정 툴
래스터 맵 샘플 예제 t ypedef s t r uc t t agTi cPnt {
doubl e PHI ; / / 위도 doubl e LAM ; / / 경도
doubl e X ; / / 이미지의 X 좌표값 doubl e Y ; / / 이미지의 Y 좌표값 } TI C_PNT ;
#i ncl ude “Pi xel Wap . h”
voi d ma i n ( voi d ) {
l ong X, Y ; TI C_PNT t p [ 4 ] ;
t p [ 0 ] . PHI =41 . 0 ; t p [ 0 ] . LAM=125 . 0 ; t p [ 0 ] . X=0 . 0 ; t p [ 0 ] . Y= 0 . 0 ; t p [ 1 ] . PHI =41 . 0 ; t p [ 1 ] . LAM=129 . 0 ; t p [ 1 ] . X=700 . 0 ; t p [ 1 ] . Y=0 . 0 ; t p [2 ] . PHI =39 . 0 ; t p [ 2 ] . LAM=125 . 0 ; t p [ 2 ] . X=0 . 0 ; t p [2 ] . Y=700 . 0 ; t p [3 ] . PHI =39 . 0 ; t p [ 3 ] . LAM=129 . 0 ; t p [ 3 ] . X=700 . 0 ; t p [3 ] . Y=700 . 0 ;
/ / 좌표변환을 위한 포인트를 설정한다 . Se t Ti c ( 4 , t p ) ;
/ / 경위도 좌표를 이미지의 픽셀 좌표로 변환한다 WGS84LL2Pi xel ( 40 . 5 , 128 . 0 , X, Y ) ;
pr i nt f ( %l d , %l d” , X, Y ) ; }
위경도 데이터는 GP S 위성이 3개 이상에서 신호를 보내는 경우에 정확한 위경도 데이터를 얻을 수 있다. 만약 정확한 위경도 데이터를 얻을 수 없을 경우에는 GP S 수신기는 가장 최근에 수신한 데이터를 송신한다. 본 시스템에서는 [그림 12]와 [그림 13]과 같이 GP S 데이터가 새로운 값이 수신되면 수신한 GP S 데이터를 프로그램 하단에 표시하고 있다. 그리고 새로운 GP S 데이터를 수신하지 못할 경우에는 Inv alid GP S Dat a "라는 문자로 GP S 수신 상태를 알 수 있다.
그림 12 GP S 데이터 수신 상태 양호
그림 13 GP S 수신불량
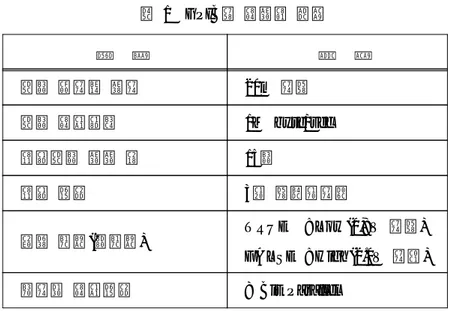
본 시스템은 스펙트럼 분석기가 측정하여 계산한 결과 값을 얻게 된다. 이때 스펙트럼 분석기의 설정을 위하여 본 시스템 상에서 원격으로 조정 할 수 있어야 한다. [그림 14]는 측정하는 주파수 영역과 레벨 값을 본 시스템에서 설정하는 그림을 보여주고 있다. 주파수 영역은 시작 주파수(start fr equen cy )와 끝 주파수(st op fr equ ency )값 또는 중심 주파수(center fr equency )와 이에 대칭적으로 표시되는 전체 주파수의 설정으로, 이렇게 두 가지 방법으로 설정할 수 있게 하였다. Span 값은 중심 주파수에 대하여 대칭적으로 표시되는 전체 주파수 영역으로 중심 주파수(cent er fr equ en cy )는 변하지 않고 시작 주파수(st art fr equen cy )와 끝 주파수(st op frequ en cy )만이 변한다. Refer en ce Lev el 값은 격자선 (g r aticu le )에서 가장 높은 수평선으로 입력 감쇄기 (in put att en u at or )와 서로 관련을 가지고 있다.
그림 14 스펙트럼 분석기 설정
[그림 14]에서 설정한 값들은 가장 최근의 설정 값들이 레지스트리 정보에 남아 있어 시스템 처음 실행 시 설정 값들을 얻을 수 있다.
그래프 창은 측정 파라미터의 값을 실시간으로 각각의 측정값의 흐름을 보여준다. [그림 15]와 같이 재생 중에는 현재 측정값을 실시간으로 그래프 아래 부분에 출력하고, 정지나 일시 정지 시에는 마우스의 이동경로에 따라 과거 측정값을 표출하는 마킹(m arkin g )기능이 있다. 그래프에서 출력해야하는 데이터의 범위가 일정하지 않기 때문에 본 시스템에서는 Y축의 범위가 측정 되는 데이터에 따라 자동으로 설정된 후 사용자가 특정 범위를 관찰하려할 때 Y축 범위를 임의 조정하여 분석할 수 있다.
그림 15 시간 축 그래프 창
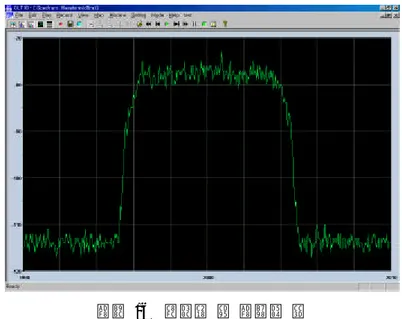
[그림 16]은 주파수 파형을 나타내는 그래프 창이다.
그림 16 주파수 축 그래프 창
스펙트럼 분석기 설정부분에서 Cent er F r eq.와 Span 값의 설정에 따라 다음 그래프의 X축에 나타나는 값들이 정해진다.
[그림 17]은 코드 도메인 파라미터 창이다. 여러 코드 중에서 사용자가 집중적으로 관찰하고자 하는 코드를 다음과 같이 빨간 선으로 선택하여 데이터를 관찰하게 된다.
그림 17 코드 도메인 창
[그림 18]과 [그림 19]는 각각 W CDM A 파라미터와 CDM A 파라미터의 측정값을 숫자 그대로 보여주는 창이다.
현재 측정되거나 재생되고 있는 값을 갱신해서 나타낸다. M ax 열과 M in 열에서는 현재까지의 데이터 중에서 가장 최대 값과 최소 값이 보이게 된다. 그리고 AV G열은 각각 측정데이터들의 현재까지의 평균값들을 계산하여 나타낸다. 각각의 파라미터 버튼을 누름과 동시에 지도 창에서 표출되는 데이터를 선택 할 수 있다.
그림 18 W CDM A 통계 창
그림 19 CDM A 통계 창
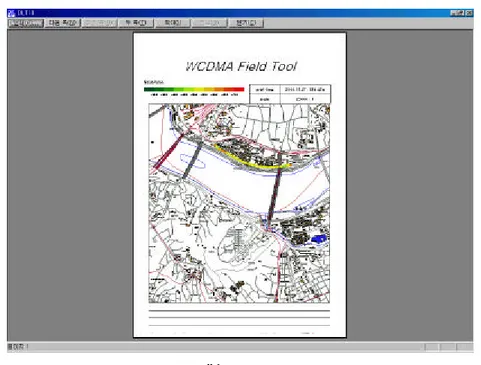
마지막으로 지도 창에서의 측정 결과를 프린트하여 결과를 분석 할 수 있다.
[그림 20]은 보고서 출력 화면의 미리 보기 화면이다. 출력된 보고서에는 지도의 축척과 프린트 날짜 데이터의 이동경로에 따른 데이터 레벨값의 경계 값과 색을 출력한다.
그림 20 보고서 출력
6. 결 론
본 논문에서 개발한 시스템은 W CDM A 필드 데이터를 효율적으로 분석하기 위해서, GP S 수신기를 탑재하여 시스템의 현재 위치 및 현재 시간을 측정함으로써 W CDM A 필드 데이터의 지역적 분포를 정확하게 분석할 수 있다. 또한, 측정된 데이터를 벡터 지도나 래스터 지도 위에 표출하여 측정 중에 사용자가 측정되는 내용을 분석할 수 있으며, 측정 데이터를 파일로 저장하여 측정 후에 다시 재생하여 볼 수 있다. 그러므로 본 시스템은 무선 기지국의 효과적이 유지・보수에 유용하게 쓰일 수 있다. 우선 제안한 시스템의 개발에 활용한 이론과 측정 장치들에 대해 살펴보고 개발 단계에서 요구사항에 따른 시스템 설계를 하였다. 본 시스템의 요구 사항은 실시간 측정 기능, 측정・재생 중 여러 형태로 데이터 표출 기능 및 환경 설정 기능을 갖는다. 그 중에서도 어떤 데이터도 측정을 빠트려서는 안 된다. 이를 위해 본 시스템은 사용자 환경부, 데이터 측정부, 데이터 표출부로 나누어 설계되어 쓰레드로 구현하였고, 데이터 측정부에 가장 높은 우선 순위를 두어 데이터의 누락 없이 측정할 수 있게 하였다.
추후 연구 과제로는 3G (Gen er ation ) 단말기와 스펙트럼 분석기를 통하여 동시에 데이터를 측정하여 비교 분석하는 기능이 요구된다. 그러나 아직 현재 상황에서 3G 단말기가 개발 단계에 있다.
참고 문헌
[1] T er o Oj an per a , R am j ee P r a sad , E dit oer , W ideb an d CDM A for T h ir d Gen er at ion M obile Com m u nicat ion , A r t ech H ou se P u blish er s , 1998
[2] Gu ide t o W ir eles s Com m un icat ion s ht tp :/ / m y .n et ian .com/ ~kt ec/ m ain .ht m l
[3] 김현동, 윈도우즈 환경에서 다중 T hr ead를 이용한 이동통신망 최적화 도구 개발 , 국민대학교 전자공학과 석사논문, 1999
[4] W CDM A M ea su r em ent S oft w ar e Oper ation m an u al, A n r it su Co., 2000
[5] Dig it al M obile Rat io T r an sm itt er T est er Oper at ion m anu al, A nr it su Co., 2000
[6] 공학용 프로그램 h tt p :/ / u ser .ch ollian .n et/ ~g it ae
[7] J effer Rich er , "A dv an ced W in dow s ", M icr os oft , 1997
[8] A P E X S oft w ar e Co. w w w .ap ex s c.com
[9] 임희경, 객체 지향 방법론을 이용한 CDM A 필드 엔지니어링 툴의 개발 , 국민대학교 전자공학과 석사논문, 1999
A bs t ra c t
D e v e lop m e n t of a W ire les s E ng inee ring T oo l of IM T - 2 000 S y s te m B as ed on W CDM A
B y Ju ng , H oi Y ou ng
D ep t . of E lect ron i cs E n g i n eeri n g G rad u a te S ch ool, K ook m in U n iv ersi ty
S eou l, K orea
I n this p ap er, a w ir eles s eng in e er ing f ie ld tool bas e d on W CD M A is d es ig n ed and im p lem en ted. E m erg ing re q uir em en ts f or hig her ra te da ta s erv ice and b e tt er sp ectr um eff icien cy ar e id en tif ied f or the th ird g en era t ion m obile rad io sy s tem s . T he p r op os ed W CD M A f ie ld t ool is us ed f or imp r ov ing the q uality of W CD M A s erv ice. T he curr en t p os it ion and t im e are m eas ured an d r ecord e d w ith W CD M A f ield da ta. W ith the sy s tem a us er can obs erv e the sp a t ial d is trib ut ion of the f ie ld da ta. F or p r ov id ing concurr ency , the sy s tem is d ecom p os ed of f our un its an d each un it is imp lem en t ed by us ing thr eads .
![그림 14 스펙트럼 분석기 설정 [그림 14]에서 설정한 값들은 가장 최근의 설정 값들이 레지스트리 정보에 남아 있어 시스템 처음 실행 시 설정 값들을 얻을 수 있다](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5293020.150855/33.892.281.628.240.494/스펙트럼-분석기-설정한-값들은-최근의-레지스트리-시스템-값들을.webp)
![그림 18 W CDM A 통계 창 그림 19 CDM A 통계 창 마지막으로 지도 창에서의 측정 결과를 프린트하여 결과를 분석 할 수 있다. [그림 20]은 보고서 출력 화면의 미리 보기 화면이다](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5293020.150855/36.892.197.720.263.459/마지막으로-창에서의-결과를-프린트하여-결과를-보고서-화면의-화면이다.webp)