붐(Boom)의 탄성을 고려한 해상 크레인의 리프팅 설계 해석
박광필1,†․ 차주환2․ 이규열3
대우조선해양 중앙연구소1
목포대학교 해양시스템공학과2
서울대학교 조선해양공학과 및 해양시스템공학연구소3
Analysis for Lifting Design of a Floating Crane with Elastic Booms
Kwang-Phil Park
1,†․ Ju-Hwan Cha
2․ Kyu-Yeul Lee
3Central R&D Institute, Daewoo Ship & Marine Engineering
1Department of Ocean Engineering, Mokpo National University
2Department of Naval Architecture & Ocean Engineering and Research Institute of Marine System Engineering, Seoul National University
3Abstract
In this paper, the dynamic response analysis of a floating crane with elastic booms and a cargo is performed. The objective is to consider the effects of the elastic boom in the lifting design stage. Governing equations of the motion for the system which consists of interconnected rigid and flexible bodies are derived based on the formulation of flexible multibody system dynamics. To model the boom as a flexible body, floating reference frame and nodal coordinates are used. Coupled surge, pitch, and heave motion of the floating crane with the cargo which has 3 degree of freedom is simulated by solving the equation numerically. Finally, the effects of the elastic boom for the lifting design that the floating crane is required to lift a heavy cargo are discussed by comparing the simulation result between with the elastic boom and with the rigid one.
Keywords : Elastic booms(탄성 붐), Lifting design(리프팅 설계), Floating crane(해상 크레인)
1. 서 론
리프팅 설계(lifting design)는 각종 크레인을 이용하여 블록 (block)을 인양, 이동 및 탑재하는 생산 작업을 계획하고 도면화 하는 설계 단계이다. 리프팅 설계를 통해 작업 블록의 중량 및 CoG(center of gravity) 계산, 러그(lug)의 위치 결정, 리프팅 설 비에 대한 결정, 각종 치구류의 용량 결정 그리고 리프팅 계산을 수행한다. 계산 결과를 바탕으로 블록 리프팅 과정에 wire rope의 장력 및 러그에 작용되는 하중에 문제가 없는지 검토하고, 도면 을 통해 현장 부서에 작업 정보를 전달한다(박광필 외, 2004).
생산 물량의 증가에 따라 블록이 대형화 되고 기존에는 시도되 지 않았던 리프팅 공법이 개발되고 있다. 이에 따라 리프팅 과정 중 안전 요소에 대한 중요성이 증가되고 있다. 위험 요소에 대한 사전 검증을 위해 차주환(2009)은 강체 다물체계 동역학(rigid multibody system dynamics)을 기반으로 하여 Fig. 1과 같은 해 상크레인과 중량물의 동적 거동을 해석하는 기술을 개발하였다.
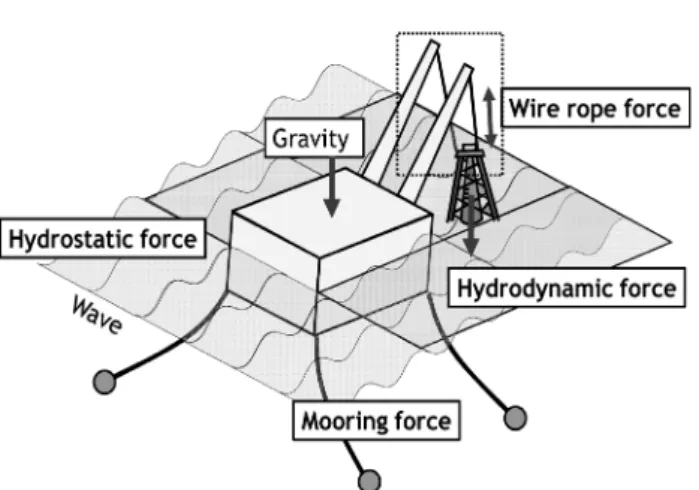
이 연구는 Fig. 2와 같이 해상크레인과 중량물에 대해 해상 작업
공간에서 작용하는 외력 및 wire rope에 의한 상호 작용이 고려되 었다.
다물체계 동역학은 서로 연결된 다수의 물체간 작용하는 구속
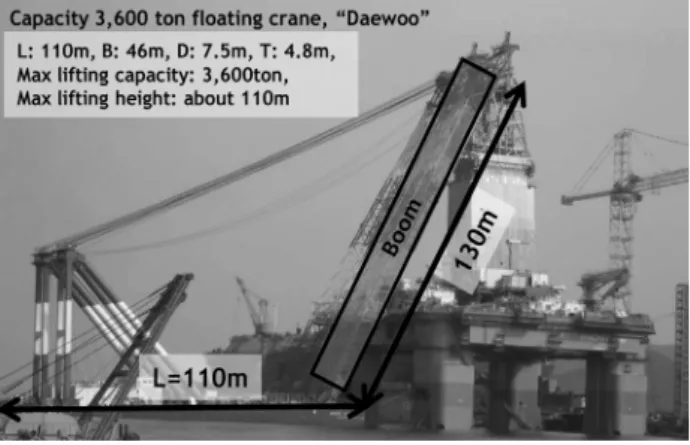
Fig. 1 The floating crane, “Daewoo”, focused in this paper (Courtesy Daewoo Shipbuilding & Ocean Engineering Co. Ltd.,)
Fig. 2 External forces considered in the dynamic response simulation of the floaing crane and the cargo(차주 환, 2009)
력을 간단하게 기술하여 동역학 방정식을 구성하는 방법이다. 최 근에는 유연 다물체계 동역학(flexible multibody system dynamics) 에 대한 연구가 일반 기계를 비롯하여 항공우주 구조물, 운송 기 계, 인체 등 여러 분야에 적용되고 있다(Schiehlen, 2004; Wasfy, 2003; Shabana, 1997).
이러한 해상 크레인의 경우 붐(boom)의 길이와 인양하는 중량 물의 하중을 고려할 때 붐의 탄성은 운동 해석에 영향을 미칠 것 으로 예상된다. 따라서 본 논문에서는 붐의 탄성이 해상 크레인 과 중량물의 동적 거동에 미치는 영향을 분석하기 위해 유연 다 물체계 동역학을 기반으로 해상크레인과 중량물의 동적 거동을 해석하였다.
붐이 강체로 가정하는 경우에는 붐은 해상크레인과 하나의 물 체로 거동한다(Fig. 3b). 하지만 탄성체 모델의 경우 붐은 변형에 의한 거동 특성을 가지게 된다. 강체 붐의 경우는 back stay에
Fig. 3 Comparison between flexible multibody system model for the floating crane with elastic booms and rigid multibody system
연결된 wire rope가 동적 거동에 영향을 주기 않기 때문에 생략되 었다(차주환, 2009). 탄성 붐의 경우에는 back stay의 wire rope 가 모델링 되어 붐을 지탱하게 된다(Fig. 3a). Back stay의 Wire rope의 장력의 영향을 고려하면, 유연 다물체계가 강체 다물체계 에 비해 보다 합리적인 모델이라고 할 수 있다. Fig. 3은 해상크 레인 붐에 적용된 두 모델의 차이를 보여 준다.
2장에서는 해상 크레인을 대상으로 붐의 탄성을 고려한 관련 연구와 비교하고 3장에서는 유연 다물체계 운동방정식과 구성요 소를 설명한다. 4장에서 운동방정식의 유도와 시뮬레이션 결과를 보이고, 결론에서 리프팅 설계에 고려해야 하는 탄성 붐의 영향 에 대해 언급한다.
2. 해상 크레인 탄성 붐 관련 연구
Ren(2008)과 Al-Sweiti(2007)는 해상 크레인의 붐을 탄성체로 고려하여 동적거동을 해석하였다. Al-Sweiti(2007)는 자유 물체 도(free body diagram)을 이용하여 선측에 위치한 크레인 붐과 중량물에 대한 뉴턴 방정식(Newton’s equation)을 유도하였다.
붐에 매달린 중량물은 1자유도를 갖는 질점으로 모델링 하고, 선 체가 주기적인 횡동요(roll) 운동을 하는 것으로 가정하였다. 탄성 에 의한 붐의 변위는 3차 보간 함수(cubic interpolation function) 와 노드 변수(nodal variable)을 사용하여 운동방정식에 포함하였 다. Ren(2008)은 3 자유도 운동을 하는 해상크레인과, 1자유도 운동을 하는 중량물을 대상으로 라그랑지 방정식(Lagrange’s equation)을 이용하여 운동방정식을 유도하였다. 외력은 유체 정 역학적 힘(hydrostatic force), 계류력 (mooring force), 점성 저항 (viscous drag force) 그리고 해양파에 의한 기진력(wave exciting force)이 고려되었으나 유체동역학적 방사력(radiation force)은 포함되지 않았다. 붐의 탄성으로 인해 붐의 끝 지점에 추가적인 변위가 발생하는 것으로 모델링 하였다. 관련 연구 현황 및 본 논 문과의 비교는 Fig. 4와 같다.
본 논문에서는 자유도는 Fig. 5와 같이 해상 크레인을 외력에 대해 상하 동요(heave), 전후 동요(surge), 종동요(pitch) 3자유도
Fig. 4 The features in this paper compared with the related works
운동을 하는 것으로 모델링 하였다. 중량물도 3자유도 운동을 하 는 강체로 모델링 되었으며, wire rope의 장력에 의해 해상 크레 인과 연성되어 있다.
Fig. 5 Degree of freedom of a floating crane and a heavy cargo
외력으로는 비선형 유체정역학 힘, 선형화된 유체동역학 힘, wire rope의 장력, 비선형 계류력, 중력이 고려되었다. 외력은 Fig. 5의 x축과 z축 방향의 성분만 작용하고 해양파는 선미 쪽에서 작용한 다. 탄성 붐을 고려하기 위하여 운동방정식은 유연 다물체계 동역 학(flexible multibody system dynamics)을 적용하여 구성하였다.
플로팅 프레임(floating frame)과 노드 좌표(nodal coordinates)를 이용하여 붐을 탄성체로 모델링 하였다. 플로팅 프레임과 노드 좌표는 3장에서 설명한다.
3. 유연 다물체계 운동방정식 구성 요소
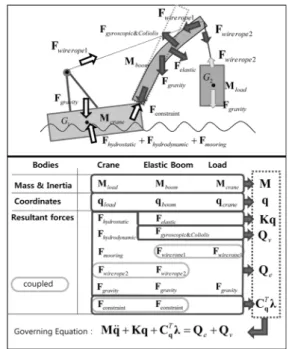
Fig. 6은 탄성 붐을 가진 해상크레인과 중량물을 대상으로 한
Fig. 6 Dynamic equation of flexible multibody system for a floating crane with an elastic boom and a heavy cargo
유연 다물체계 운동 방정식의 구성 요소를 나타낸 것으로 기본적 으로 강체 다물체계 운동방정식의 구조를 가지고 있다. 하지만 탄성체 모델을 포함하기 때문에 운동방정식의 유도 과정과 의미 가 달라지게 된다. 3장에서는 각 항의 의미와 유도 과정에 대해 언급한다.
3.1 좌표계와 기구학
Fig. 7와 같은 강체 상의 한 점의 위치
는 식(1)과 같이 물체 고정 좌표계(body fixed frame, A-frame)의 병진 위치
와 회전 변환
을 이용하여 관성 좌표계(inertial reference frame, E-frame)에서 표현한다.
의 오른쪽 아래 첨자는 E- frame에서 정의된 점 P의 위치 벡터를 의미하며, 왼쪽 위의 첨자 는 위치 벡터를 E-frame의 단위 벡터로 분해한(resolve) 것을 표 현한다. Fig. 7에서는 위치 벡터가 정의된 E-frame과 단위 벡터 가 분해된 E-frame이 같기 때문에 왼쪽 위의 첨자가 생략되었다.
는 A-frame의 단위벡터를 E-frame의 단위벡터로 변환하는 행렬이다.Fig. 7 Position of an arbitrary point P on the rigid body in inertial reference frame
(1)탄성체의 운동을 기술하는 방법에는 Fig. 8과 같은 탄성체 상 의 한 점을 식(2)와 같이 강체 운동과 변형 벡터
합으로 나타내는 방법이 있다. 이것을 플로팅 프레임(floating frame)을Fig. 8 Position of an arbitrary point P' on the elastic body in inertial reference frame
이라고 하며 강체의 운동방정식을 탄성체 모델로의 확장하는 것 이 용이하기 때문이 대표적으로 사용되는 방법이다(Wasfy, 2003).
′
(2)3.2 형상 매트릭스와 탄성 좌표
변형 벡터
′
는 (이하
)는 탄성체의 변위를 나타내는 것으로 유연 다물체계 운동방정식이 강체 다물체계 운동방정식과 구별되는 근본적인 개념이다. Fig. 8에서 탄성체는 A-frame의
축 방향의 각 위치에서 탄성에 의한 변형 성분으로 와 를 갖는다. 이 변형은 식(3)과 같은 근사함수로 가정된다.
(3)
이 때 계수는 탄성체의 양 끝단 (이하 노드, node)에서 주어진 조건 식(4)으로 구할 수 있다.
′
′
(4)
과
는 인 지점에서
와
방향의 변위이며
는 기울기이다. 마찬가지로
,
,
는 인 지점에서 변 위와 기울기이다. 따라서 식(3)의 계수를 노드의 조건으로 나타내 면 변형 벡터
′
는 식(5)와 같다.
′
(5)
유연 다물체계 운동방정식에서는 일반적으로 변형 벡터(de- formation vector)가 식(6)과 같이 형상 행렬(shape matrix) 와 탄성 좌표(elastic coordinates)
로 표현된다. 오른쪽 위 첨자 는 물체의 번호를 의미한다.
(6)변형 벡터를 식(5)의 방법으로 나타내는 것을 노드 좌표(nodal coordinate) 방법이라고 한다. 이것은 탄성체를 유한개의 요소
(element)로 분할하고, 각 요소의 양 끝점(노드)의 변위와 기울기 를 이용하여 요소 내부의 임의의 위치에서의 변위를 보간하는 방 법이다. 또 다른 방법으로는 유한요소모드 해석법에 의해 계산된 진동 모드와 벡터를 이용하여 탄성체의 변형 형상을 계산하는 방 법이다(손정현 그리고 유완석, 2003). 탄성좌표가 주어진 경우는 탄성체의 변형 벡터를 구할 수 있다. 유연 다물체계 운동방정식 에서는 매 단위 시간마다 연성된 다른 물체와의 상호작용에 의해 탄성 좌표가 구해진다. 점의 위치를 변경하면서, 구해진 탄성 좌표와 형상 행렬을 곱하여 매 단위 시간마다 탄성체의 형상을 구하는 것이다.
속도 벡터는 위치벡터를 미분하여 식(7.a)과 같이 탄성 좌표를 포함한 일반화 좌표 qi의 식으로 구한다. ,
,
는 각각 단 위 행렬, 식(1)의
과 같은 좌표계의 회전 변환 행렬, 그리고 회전 변환의 미분 행렬을 나타내고 식(7.b)와 같이 로 표시한다.
(7.a)
(7.b)3.3 유연 다물체계 운동 방정식
식(6)와 식(7.b)을 이용하여 Fig. 9와 같이 유연 다물체계 운동 방정식을 유도한다. 탄성체의 변형을 나타내는 형상 행렬과 탄성 좌표가 위치 벡터에 포함되어 있다. 질량 행렬(mass matrix), 외 력 행렬(generalized external force matrix), 탄성력 행렬(elastic force matrix), 2차 속도 행렬(quadratic velocity vector) 등 운동 방정식의 각 항들은 모두 형상 행렬(shape matrix)과 탄성 좌표 (elastic coordinate) 의해 구성된다(Shabana, 2005).
Fig. 9 Equations of Flexible Multibody System Dynamics 각 항의 의미는 다음과 같다.
(8)일반화 좌표 방향으로 작용하는 외력 (generalized external forces).
(9)강성 행렬(stiffness matrix) : 변위와 곱하여 탄성력이 되며, 강성 행렬은 탄성력에 의한 가상일(virtual work)로부터 유도된다.
(10)구속 조건에 의한 구속력으로는 는 Lagrange Multiplier이다.
(11)
연속 시스템의 운동 에너지로부터 유도되는 질량 매트릭스 (mass matrix)이다.
(12)운동 에너지를 시간과 위치에 따라 미분하여 유도되는 2차 속도 행렬(quadratic velocity matrix)이며, 회전력(gyroscopic force)와 코리올리 힘(Coriolis force) 성분이다.
4. 붐의 탄성을 고려한 해상 크레인과 중량물의 다물체계 운동방정식 구성 및 적용
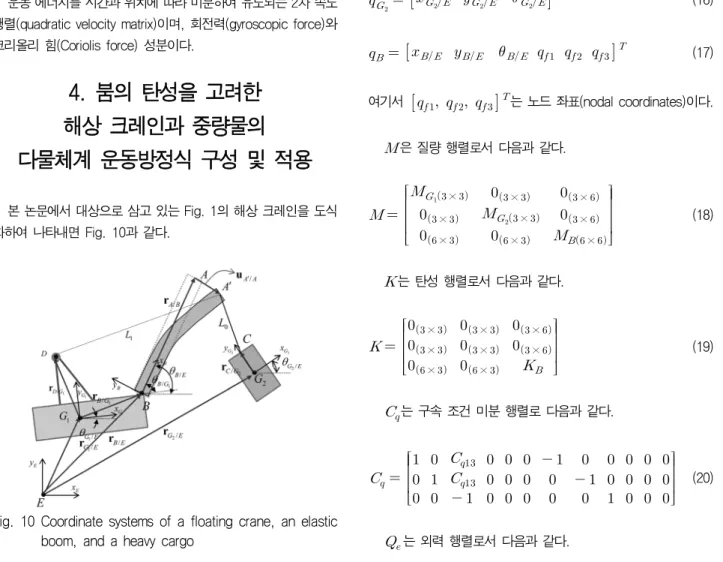
본 논문에서 대상으로 삼고 있는 Fig. 1의 해상 크레인을 도식 화하여 나타내면 Fig. 10과 같다.
Fig. 10 Coordinate systems of a floating crane, an elastic boom, and a heavy cargo
해상 크레인의 붐을 탄성체(elastic boom)로 고려하였으며, 해 상 크레인의 나머지 선체 부분과 해상 크레인에 매달린 중량물은 강체로 고려하였다.
,
는 각각 해상 크레인과 중량물의 질 량 중심이고, 는 해상 크레인과 붐 사이의 연결점이며, 와′는 각각 변형 전후의 붐 끝 지점이다. 는 중량물에 wire rope가 연결된 지점이다. 는 back stay에 wire rope가 연결된 지점이다.
유연 다물체계 운동방정식의 최종 형태는 다음과 같다.
(13)여기에서 는 세 물체의 위치를 나타내는 일반화 좌표(generalized coordinates)로서 다음과 같다.
(14)
(15)
(16)
(17)여기서
는 노드 좌표(nodal coordinates)이다.은 질량 행렬로서 다음과 같다.
×
×
×
×
×
×
×
×
×
(18)
는 탄성 행렬로서 다음과 같다.
×
×
×
×
×
×
×
×
(19)
는 구속 조건 미분 행렬로 다음과 같다.
(20)
는 외력 행렬로서 다음과 같다.
×
×
×
(21)
는 2차 속도 행렬로서 다음과 같다.
×
×
×
(22)
여기에 속도에 비례하는 구조 감쇠(structural damping)항을 고려 하였다.
유도된 방정식을 수치적으로 계산하여 해상 크레인과 중량물 의 동적 거동을 해석하였다. 해양파의 외력으로는 파고 1m, 10초 의 주기를 갖는 선미파를 사용하였다. 이것은 작업 해상에서 계 측되는 파고와 주기 중에서 비교적 큰 값을 가정한 것이다. 해상 크레인과 중량물은 외력에 대해 상하 동요(heave), 전후 동요 (surge), 종동요(pitch) 3자유도 운동을 하는 것으로 모델링 하였 다. 해상크레인의 자체 중량은 12,600ton이며 중량물 1,300ton 에 대해 동적 거동 시뮬레이션을 수행하였다. Fig. 11은 탄성 붐 끝 단의 변위를 나타낸다. 처짐 값을 중심으로 한 진동의 거동과
Fig. 11 Displacement of the elastic boom tip point (wave : amplitude 0.5m, period 10sec, load weight : 1,300ton)
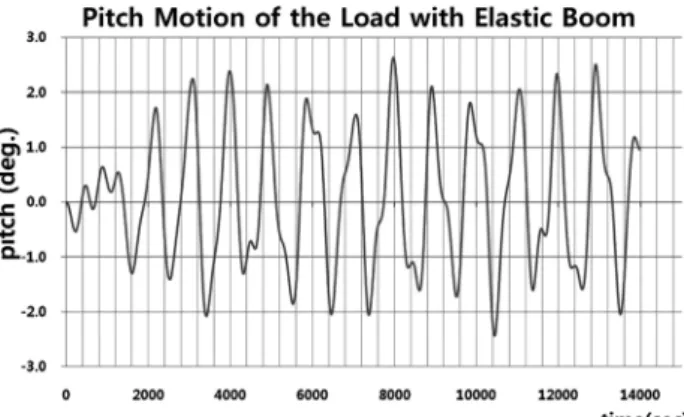
Fig. 12 Pitch motion of the load with elastic boom (wave : amplitude 0.5m, period 10sec, load weight : 1,300ton)
구조 감쇠의 영향으로 인해 진동의 폭이 감소하는 결과를 보여준 다. Fig. 12는 중량물의 종동요(pitch)를 나타낸 것으로 붐의 탄 성에 의한 진동 거동을 볼 수 있다.
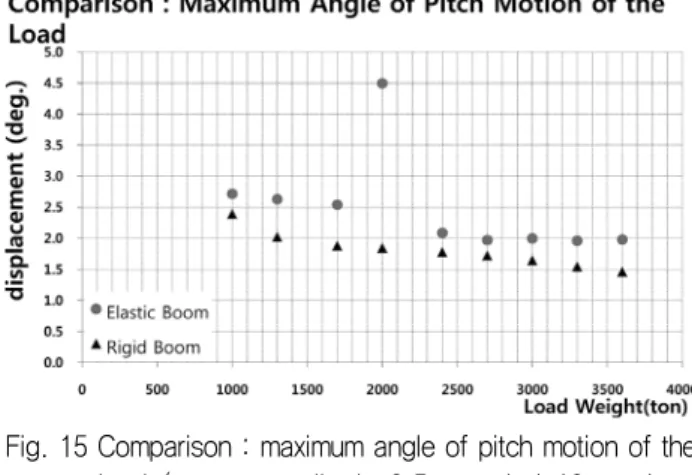
탄성 붐이 중량물의 거동에 미치는 영향을 비교하기 위해 강체 붐을 사용한 시뮬레이션 결과와 비교하였다. 중량물의 하중이 1,000ton, 1,300ton, 1,700ton, 2,000ton, 2,400ton, 2,700ton, 3,000ton, 3,000ton 그리고 3,600ton인 경우에 대해 붐을 강체로 고려한 경우와 탄성체로 고려한 경우에 대해 각각 시뮬레이션 하 였다. Fig. 13 전후 동요(surge)의 최대 변위를 비교한 것이다. 붐 의 탄성을 고려한 경우가 강체로 모델링 한 경우와 비교하여 최 대 변위가 더 크게 나타나는 것을 볼 수 있다. 상하 동요(heave) 에 대한 결과는 Fig. 14와 같다. 중량물의 하중이 증가할수록 감 소하는 경향은 유사하지만, 붐의 탄성이 고려된 경우의 최대 변 위가 강체 붐의 경우보다 크게 나타난다. 중량물의 종동요는 정 지상태에서 중량물의 수직 축을 기준으로 자세의 변화를 나타내 는 것으로, Fig. 15와 같이 붐의 탄성이 고려된 경우에 자세의 변 화가 더 큰 것을 확인할 수 있다.
Fig. 16은 중량물에 연결된 wire rope에 작용하는 최대 장력을 비교한 것이다. 붐을 강체로 고려한 경우에도 해상 크레인과 중
Fig. 13 Comparison : maximum displacement of surge motion of the load (wave : amplitude 0.5m, period 10sec, load weight : 1,000 ton~3,600 ton)
Fig. 14 Comparison : maximum displacement of heave motion of the load (wave : amplitude 0.5m, period 10sec, load weight : 1,000 ton~3,600 ton)
Fig. 15 Comparison : maximum angle of pitch motion of the load (wave : amplitude 0.5m, period 10sec, load weight : 1,000 ton~3,600 ton)
Fig. 16 Comparison : maximum tension of wire rope (wave : amplitude 0.5m, period 10sec, load weight : 1,000 ton~3,600 ton)
량물의 동적 거동의 영향으로 중량물의 하중보다 큰 장력이 작용 한다. 붐의 탄성을 고려한 경우에는 동적 하중이 더 크게 작용하 는 것을 확인할 수 있다.
시뮬레이션의 결과 붐의 탄성을 고려한 경우에는 블록의 동적 거동과 wire rope에 작용하는 하중이 더 크게 나타나는 것을 확인 할 수 있었다. 종동요(pitch)의 경우 Fig. 15와 같이 주어진 해상 조건과 특정한 중량물의 하중에서 선형적으로 예측할 수 없는 거 동이 나타나기도 하였다. 따라서 리프팅 설계에는 기존 강체 모 델을 이용한 동적 거동 해석에 붐의 탄성을 고려하는 것이 합리 적이다. 이러한 해석의 결과를 바탕으로, 리프팅 설계시 동적 효 과를 나타내는 설계 가중치를 좀 더 정확하게 반영할 수 있다.
5. 결 론
본 논문에서는 붐의 탄성을 고려하여 해상크레인과 중량물의 동적 거동을 해석하였고 붐의 탄성이 해상 크레인과 중량물의 거 동에 영향을 미치는 것을 확인하였다. 리프팅 설계에서는 해상 크레인과 중량물의 거동으로 인한 위험 요소를 사전에 검토하여 조치하는 것이 중요하다. 따라서 붐의 탄성의 영향도 다양한 경
우에 대해 사전에 분석되어 리프팅 설계에 반영되는 것이 필요하 다.
참 고 문 헌
Al-Sweiti, Y. & Sőffker, D., 2007, Cargo pendulation suppression of ship cranes with elastic booms, Mathematical and Computer Modelling of Dynamical Systems, Vol.13, No.6, pp.503-529.
Cha, J.H., Ham, S.H., Park, K.P. & Lee, K.Y., 2008, Block Election Simulation of Floating Crane based on Multibody Dynamics, 29th Ship Design Research Conference, Ulsan, Republic of Korea, 21-22 August 2008.
Park, K.P., Kim, S.S. & Kim, S.M., 2004, Development of Crane Lifting Simulation Framework, DSME Technical Report No. DA04E0.
Ren, H., Wang, X., Hu, Y. & Li, C., 2008, Dynamic response analysis of a moored crane-ship with a flexible boom, Journal of Zhejiang University Science A, Vol.9, No.1, pp.29-31.
Schiehlen, W., 2005, Recent developments in multybody dynamics, Journal of Mechanical Science and Technology, Vol. 19, No.1., pp.227-236.
Shabana, A.A., 1997, Flexible multibody dynamics : Review of past and recent development, Multibody System Dynamics, Vol.1, pp.189-222.
Shabana, A.A., 2005, Dynamics of multibody systems, Third edition, Cambridge University Press.
Sohn, J.H. & Yoo, W.S., 2003, Study on the Dynamic Analysis Method using the Modal Coordinates and the Absolute Nodal Coordinates, KSME Fall Conference, Muju, Republic of Korea, 5-8, November 2003.
Wasfy, T.M., Noor, A.K., 2003, Computational strategies for flexible multibody systems, Applied Mechanics Reviews, pp.
553-613.
박 광 필 차 주 환 이 규 열