정밀도로지도 레이어의 품질향상을 위한 자동오류 판독 연구 Study on Automated Error Detection Method for Enhancing High
Definition Map
홍송표1) · 오종민2) · 송용현3) · 신영민4) · 성동기5)
Hong, Song Pyo·Oh, Jong Min·Song, Yong Hyun·Shin, Young Min·Sung, Dong Ki
Abstract
Autonomous driving can be limited by only using sensors if the sensor is blocked by sudden changes in surrounding environments or large features such as heavy vehicles. In order to overcome the limitations, the precise road-map has been used additionally. In korea, the NGII (National Geographic Information Institute) produces and supplies high definition map for autonomous vehicles. Accordingly, in this study, errors occurring in the process of e data editing and dtructured esditing of high definition map are systematically typed providing by the National Geographic Information Institute. In addition, by presenting the error search process and solution for each situation, we conducted a study to quickly correct errors in high definition map, and largely classify the error items for shape integrity, spatial relationship, and reference relationship, and examine them in detail. The method was derived.
Keywords : Autonomous Driving, High Definition Map, Shape Integrity, Spatial Relationship, Reference Relationship
초 록
급변하는 주변상황이나 대형차량과 같은 큰 지형지물에 센서가 가려질 경우에는 센서만을 이용한 완전 자율주 행에는 한계가 따른다. 이에 자율주행을 위해서 센서를 이용한 한계점을 극복할 수 있도록 정밀한 도로지도를 부가 적으로 이용하는 방법이 사용되고 있으며, 국내의 경우에는 국토지리정보원에서 자율주행차를 위한 정밀한 도로 지도를 제작 및 공급하고 있다. 이에 본 연구에서는 국토지리정보원에서 제공하는 정밀도로지도의 정위치 및 구조 화 편집 과정에서 발생하는 오류를 체계적으로 유형화 하였다. 또한 각 상황에 맞는 오류 탐색 과정 및 해결방안을 제시하여 신속하게 정밀도로지도의 오류를 수정할 수 있는 연구를 수행하였으며 크게 도형무결성, 공간관계, 참조 관계에 대하여 오류항목을 대분류하고 이에 대한 세부적인 검사방법을 도출하였다.
핵심어 : 자율주행, 정밀도로지도, 도형무결성, 공간관계, 참조관계
391 Received 2020. 08. 03, Revised 2020. 08. 10, Accepted 2020. 08. 21
1) Member, Spatial Information Industry Promotion Institute (E-malil: [email protected])
2) Corresponding Author, Department of Geoinformatics Engineering, University of Seoul, Spatial Information Industry Promotion Institute (E-malil: jm.oh@
spacen.or.kr)
3) Member, Spatial Information Industry Promotion Institute (E-malil: [email protected])
4) Department of Geoinformatics Engineering, University of Seoul, Spatial Information Industry Promotion Institute (E-malil: [email protected]) 5) Spatial Information Industry Promotion Institute (E-malil: [email protected])
https://doi.org/10.7848/ksgpc.2020.38.4.391 Original article
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://
creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
1. 서 론
자율주행차에는 위성항법장치(GNSS: Global Navigation Satellite System), 관성항법장치(INS: Inertial Navigation System), 라이다(LiDAR: Light Detection And Ranging), 디지털 카메라 등의 센서들이 탑재되어 있다(Hong et al., 2018).
자율주행차에 탑재된 센서들의 인식범위는 약 200m 내외로 도로상의 모든 정보를 스스로 인지, 판단, 제어하는 것이 현실 적으로 어려우며, 운전자와 탑승자의 안전을 위해서는 자율주 행차가 도로요소들을 사전에 인지 할 수 있는 인프라 정보가 필 수적으로 필요하다(So and Moon, 2018).
이에 자율주행차의 안전한 주행을 위한 인프라 정보로 정밀 한 디지털 형식의 도로지도가 부가적으로 필요하며, 이러한 지 도는 지상 모바일 매핑시스템(MMS: Mobile Mapping System) 에서 취득된 3차원 점군(point cloud) 및 영상을 기반으로 3차 원 도화(digitizing)를 수행하여 지도를 제작하고 있다(NGII, 2015). 이에 따라 국내에서는 국토지리정보원 주도로 2015년부 터 정밀도로지도를 구축하고 있으며, 이에 대한 국·내외 연구에 서는 도로주변의 3차원 점군 또는 영상을 이용하여 유의미한 도로객체를 분류하는 연구, 3차원 점군을 모델링하는 연구 등 에 초점이 맞추어져 있다(Lehtomäki et al., 2015; Qi et al., 2016;
Jeong and Lee, 2016; Hong and Kim, 2019).
하지만 이 지도는 자율주행에 있어 사람의 안전과 직결되는 정보이기 때문에 높은 정확도의 품질 기준이 요구 되지만 기구 축된 데이터에 대한 품질 검증에 대해서는 기술개발의 투자여 력이 부족한 상황이다(KAIA, 2017).
국·내외에서는 수치지도의 오류 탐지 및 갱신에 대한 연구 가 수행되었으나(Park, 2006; Lee et al., 2008; Qi, 2009; Choi, 2015), 2차원의 수치지도와 달리 정밀도로지도는 3차원의 지도 이며 기존 수치지도와 레이어 구성 및 테이블 정의가 상이하고 레이어간의 3차원 공간관계 및 외래키와 같은 참조관계(foreign key)로 인하여 기존 수치지도의 오류탐지 방법의 직접적인 적 용이 어려운 실정이다.
이에 본 연구에서는 국토지리정보원에서 제공하는 정밀도로 지도의 정위치 및 구조화 편집 과정에서 발생하는 오류를 체계 적으로 유형화 하고, 각 상황에 맞는 오류 탐색 과정을 제시하 여 신속하게 정밀도로지도의 오류를 수정할 수 있는 연구를 수 행하였다.
2. 연구방법 2.1 공간 연산자
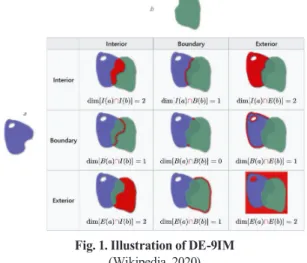
공간연산자는 DE-9IM (Dimensionally Extended nine- Intersection Model)에서 정의한 연산자를 사용하였다. DE- 9IM이란 점, 선, 면으로 정의된 두 도형간의 내부(interior), 경 계(boundary), 외부(exterior)의 총 9가지 경우의 교집합 차원 관계를 Eq. (1), Fig. 1과 같이 행렬로 나타내고 2차원 실수 공 간(
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
)에서 정의된다.
또한 Table 1과 같이 DE-9IM의 원소를 Boolean형으로 반환 할 수 있다(Clementini et al., 1994; Lee et al., 2005).
dim∩ dim∩ dim∩
dim∩ dim∩ dim∩
dim∩ dim∩ dim∩
≠
×
±
(1)
where, dim is the dimension of the intersection (∩) of the interior(I), boundary(B), and exterior(E) of geometries a and b.
Fig. 1. Illustration of DE-9IM (Wikipedia, 2020)
Table 1. Return type of geometry
Dimension Boolean
Points 0 True(T)
Lines 1 True(T)
Areas 2 True(T)
Empty -1 False(F)
따라서 공간연산자 동일(Equals), 분리(Disjoint), 접촉 (Touches), 이내(Within), 중복(Overlap)등의 공간관계를 DE- 9IM로 판별 할 수 있다. 예를 들어 Fig. 2와 같은 공간관계일 경 우, Within(A, B)의 DE-9IM은 [T * F; * * F; * * *]로 정의되며, * 의 의미는 임의의 값을 뜻한다. Fig. 2의 DE-9IM(A, B) = [0 F F;
393 F F F; 2 1 2]이므로 Within 조건에 해당한다.
Fig. 2. Illustration of within(A, B)
2.2 국토리정보원의 정밀도로지도 레이어
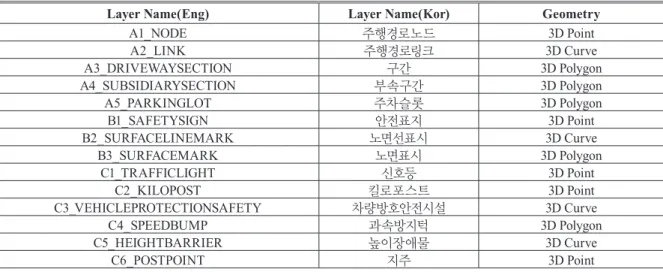
2019년 국토지리정보원에서 정의한 레이어어 항목은 Table 2, Fig. 3과 같이 총 14개의 레이어로 구성되어 있으며, 2개의 가상객체(노드,링크)와 12개의 실객체로 구성되어있다(NGII, 2019).
Fig. 3. NGII’s HD map layers
2.3 3차원 도형무결성 탐색 기법
기존의 도형무결성 오류탐색의 경우에는 2차원 수치지도 기반의 검수방법이며, 대표적인 공간분석 오픈 소프트웨어인 QGIS의 도형검증기(geometry checker) 플러그인 또한 2차원 지 도에 대하여만 검사하므로 본 연구에서는 3차원 기반의 도형무 결성 탐색 기법을 아래와 같이 도출하였다.
2.3.1 버텍스 중복
버텍스 중복 오류 탐색의 경우에는 선, 면 레이어를 대상으 로 하며, 대상 객체의 버텍스를 추출하여 연속적으로 3차원 좌 표가 동일한 경우를 탐색한 후에 Eq. (2)와 같이 버텍스의 인덱 스 차이가 1일 경우 오류로 판독한다. 또한 면형 레이어의 경우, 기하구조상에 시작 버텍스와 끝 버텍스가 동일하기 때문에 예 외처리 하며, 멀티파트의 경우에는 싱글파트로 분해하여 오류 탐색을 수행한다.
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
(2)
where,
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
is a number of vertex index,
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
is a object of hd map for curve, polygon‘s layer
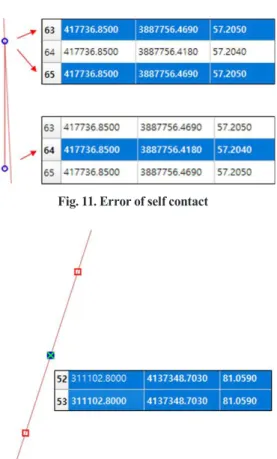
2.3.2 자기겹침
자기겹침 오류 탐색의 경우에는 선, 면 레이어를 대상으로 하 며, 대상 객체의 버텍스를 추출하여 3차원 좌표가 동일한 경우 를 탐색한 후에 Eq. (3)과 같이 버텍스의 인덱스 차이가 2이상일 경우 오류로 판독한다. 버텍스 중복오류가 발생할 경우에는 해 당 좌표를 예외처리하며, 그 외 예외 처리는 2.3.1절과 동일하다.
Layer Name(Eng) Layer Name(Kor) Geometry
A1_NODE 주행경로노드 3D Point
A2_LINK 주행경로링크 3D Curve
A3_DRIVEWAYSECTION 구간 3D Polygon
A4_SUBSIDIARYSECTION 부속구간 3D Polygon
A5_PARKINGLOT 주차슬롯 3D Polygon
B1_SAFETYSIGN 안전표지 3D Point
B2_SURFACELINEMARK 노면선표시 3D Curve
B3_SURFACEMARK 노면표시 3D Polygon
C1_TRAFFICLIGHT 신호등 3D Point
C2_KILOPOST 킬로포스트 3D Point
C3_VEHICLEPROTECTIONSAFETY 차량방호안전시설 3D Curve
C4_SPEEDBUMP 과속방지턱 3D Polygon
C5_HEIGHTBARRIER 높이장애물 3D Curve
C6_POSTPOINT 지주 3D Point
Table 2. List of HD map layers
394
Fig. 4. Self contact
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
(3)
where,
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
≥ 2,
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
is a number of vertex index,
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
is a object of hd map for curve, polygon‘s layer
2.3.3 자기교차
자기교차 오류 탐색의 경우에는, 선, 면 레이어를 대상으로 하며, 대상 객체의 연속적인 버텍스간의 선분을 생성하고 Eq.
(4)와 같이 생성된 선분끼리의 교차 및 교차점의 높이값이 동일 하면 오류로 탐색한다.
Fig. 5. Self intersection
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
(4)
where,
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
is a number of vertex index,
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
<
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
,
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
is a object of hd map for curve, polygon‘s layer
2.3.4 폴리곤 미폐합
폴리곤 미폐합 오류 탐색의 경우, 면형 객체의 시작 버텍스와 끝 버텍스를 추출하여 Eq. (5)와 같이 두 버텍스간의 3차원 좌 표가 동일하지 않으면 오류로 탐색한다.
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
(5)
where,
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
is start vertex,
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
×
±
is end vertex,
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
dim ∩ dim ∩ dim ∩
≠
is a object of hd map for polygon‘s layer
2.3.5 홀 폴리곤
홀 폴리곤 오류 탐색의 경우, Fig. 6과 같이 객체의 지오메 트리 정보를 추출한 결과 해당 객체의 지오메트리 배열이 다 음과 같이 2차원 배열로 결과 값이 나오는 경우 오류로 탐색 한다.
Fig. 6. Geometry of hole polygon 2.3.6 멀티파트
멀티파트 오류 탐색의 경우, Fig. 7과 같이 객체의 지오메 트리 정보를 추출한 결과 해당 객체의 지오메트리 배열이 다 음과 같이 3차원 배열로 결과 값이 나오는 경우 오류로 탐색 한다.
Fig. 7. Geometry of multi part
2.4 공간관계 오류 유형 및 탐색 기법
정밀도로지도의 레이어간에는 논리적 공간관계가 발생한다.
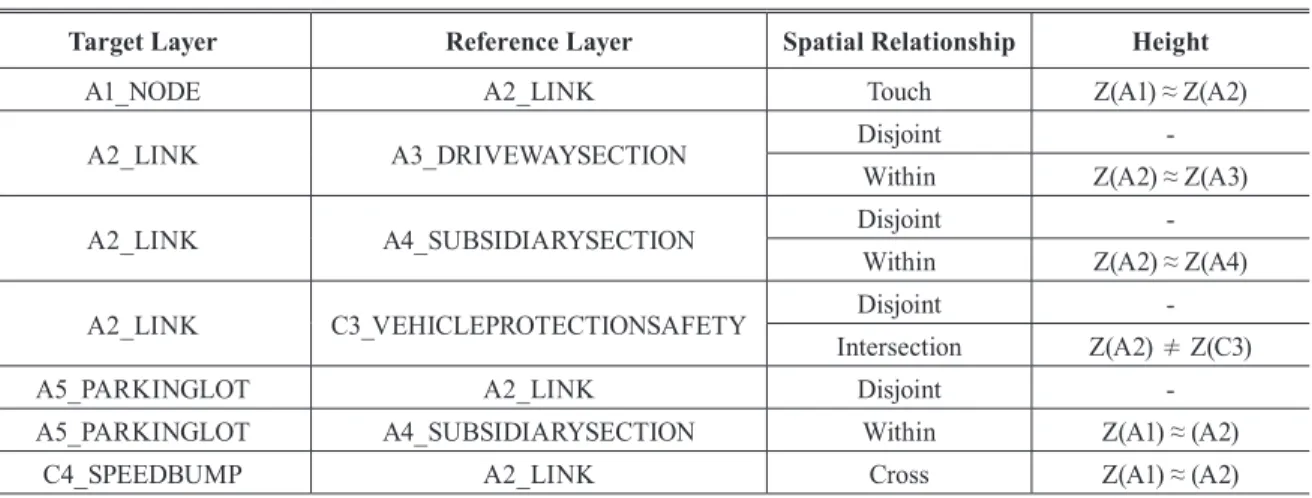
예를 들어 주차슬롯(A5_PARKINGLOT) 또는 차량방호안전 시설(C3_VEHICLEPROTECTIONSAFETY)은 주행경로 링 크(A2_LINK)와 공간적으로 분리(Disjoint) 되어야 되거나 주 행경로노드(A1_NODE)와 링크(A2_LINK)는 접촉(Touch)해 야 한다. 또한 정밀도로지도 구축매뉴얼 상에 주행경로 링크 (A2_LINK)는 구간(A3_DRIVEWAYSECTION) 또는 부속구 간(A4_SUBSIDIARYSECTION)을 기준으로 분절해야한다 는 규정(NGII, 2019)등이 있기 때문에 Table 3과 같이 구축 매 뉴얼 및 공간적 관계를 분석하여 레이어간의 공간적 허용조건 을 도출하였다.
또한 정밀도로지도는 3차원 지도이며 각 객체의 버텍스에 높 이값이 입력되어있다. 하지만 DE-9IM에서 정의하는 공간관계
395 는 2차원에서 정의되므로 추가적으로 3차원 높이 조건을 추가
하였다.
2.5 참조관계 오류 유형 및 탐색 기법
정밀도로지도의 레이어의 필드에는 외래키들이 존재한다.
여기서 외래키란 Fig. 8과 같이 어떤 릴레이션(레이어)에 소속된 속성(필드)이 다른 릴레이션(레이어)의 기본키가 되는 키이다.
공간데이터 베이스에서는 레이어간의 특정 공간관계를 만족할 경우에 외래키로 참조하며 정밀도로지도 레이어에서 자동 오 류탐색이 가능한 항목을 Table 4와 같이 도출하였다. Table. 4 에서 Associated Field 항목은 외래키는 아니지만 참조관계 오 류 탐색을 수행하면서 부가적으로 검사가 가능한 필드 항목을 도출한 것이다.
Fig. 8. Example of foreign key 2.5.1 주행경로 링크
(1) FromNodeID, ToNodeID 필드 검사
FromNodeID, ToNodeID에는 주행경로링크의 시·종점에 존
Target Layer Reference Layer Spatial Relationship Height
A1_NODE A2_LINK Touch Z(A1) ≈ Z(A2)
A2_LINK A3_DRIVEWAYSECTION Disjoint -
Within Z(A2) ≈ Z(A3)
A2_LINK A4_SUBSIDIARYSECTION Disjoint -
Within Z(A2) ≈ Z(A4)
A2_LINK C3_VEHICLEPROTECTIONSAFETY Disjoint -
Intersection Z(A2) ≠ Z(C3)
A5_PARKINGLOT A2_LINK Disjoint -
A5_PARKINGLOT A4_SUBSIDIARYSECTION Within Z(A1) ≈ (A2)
C4_SPEEDBUMP A2_LINK Cross Z(A1) ≈ (A2)
Table 3. Spatial Relationship for HD Map’s layers
Matched Layer Matched Field Associated Field Target Layer
A2_LINK
FromNodeID - A1_NODE
ToNodeID - A1_NODE
R_LinkID LaneNo A2_LINK
L_LinkID LaneNo A2_LINK
SectionID RoadType A3_DRIVEWAYSECTION - A4_SUBSIDIARYSECTION
A5_PARKINGLOT SectionID - A4_SUBSIDIARYSECTION
C3_VEHICLEPROTECTIONSAFETY Ref_ID LowHigh C3_VEHICLEPROTECTIONSAFETY
C4_SPEEDBUMP LinkID - A2_LINK
Table 4. Field Matching of HD Map’s layers