ABSTRACT
PURPOSES : This study aims to evaluate the effects of vehicle dynamic behaviors on ride quality.
METHODS : Simulation and field test were conducted to analyze the behavior of a driving vehicle. The simulation program CarSIM was applied and an INS (Inertial Navigation System) was used for field experiments. A small simulator was developed to simulate vehicle behavior such as roll, pitch, and bounce. The panels evaluated the ride quality in five stages from “very satisfied”to “very dissatisfied.”Experiments were conducted on a total of 144 cases of vehicle behavior combinations.
RESULTS : In both simulation and field tests, pitch is the largest and yaw the smallest. Especially in the field test, the amount of yaw is very low, about 7% of pitch and 18% of roll. The sensitive and extensive analysis conducted related ride quality with changing the frequency and amplitude. It was found that the most sensitive frequency range is 8 Hz across all amplitudes. Moreover, the combination of the roll and bounce was most sensitive to the ride quality at the low-frequency range.
CONCLUSIONS : This result show that the vertical vehicle behavior (bounce) as well as the rotational behavior (roll and pitch) are highly correlated with ride quality. Therefore, it is expected that a more reasonable roughness index can be developed through a combination of vertical and rotational vehicle behavior.
Keywords
ride quality, road profile, simulator, bounce, roll, pitch, yaw, IRI, CarSIM, INS
소형 시뮬레이터를 이용한 차량거동요소별 승차감 민감도 평가
Evaluation of Ride Quality Sensitivity on Vehicle Dynamic Behavior Using a Small Scale Simulator
이`재`훈 Lee, Jaehoon 정회원·한국도로공사 도로교통연구원 책임연구원 (E-mail : [email protected]) 손`덕`수 Sohn, Ducksu 정회원·한국도로공사 도로교통연구원 선임연구원 (E-mail : [email protected])
박`제`진 Park, Jejin 정회원·한국도로공사 도로교통연구원 수석연구원·교신저자 (E-mail : [email protected]) 문`형`철 Mun, Hyungchul 정회원·(주)로드텍 대표이사 (E-mail : [email protected])
Int. J. Highw. Eng. Vol. 19 No. 5 : 97-106 OCTOBER 2017 https://doi.org/10.7855/IJHE.2017.19.5.097
Corresponding Author : Park, Jejin, Research Director, Ph.D.
Korea Expressway Corporation, Research Institute, 208-96, Dongbu-daero 922beon-gil, Dongtan-myeon, Hwaseong-si, Gyeonggi-do, 18489, Korea
Tel : +82.31.8098.6334 Fax : +82.31.8098.6339 E-mail : [email protected]
International Journal of Highway Engineering http://www.ksre.or.kr/
ISSN 1738-7159 (Print) ISSN 2287-3678 (Online)
Received Aug. 24. 2017 Revised Aug. 24. 2017 Accepted Sep. 21. 2017
1. 서론
도로관리의 패러다임이 관리자 중심에서 이용자 중심 으로 변화하면서 도로포장의 기능성에 대한 중요성이 점차 커지고 있다. 따라서, 도로이용자에게 쾌적하고 안
전한 주행환경을 제공하기 위해 평탄성, 소음, 미끄럼 등 도로포장의 기능성을 향상시키기 위한 노력이 진행 되고 있다. 도로포장의 기능성 중 평탄성은 주행쾌적성 향상을 위해 가장 기본적으로 갖추어야 할 요소이다.
도로포장의 평탄성을 평가 및 관리하기 위해 다양한 형태의 평탄성 지수(roughness index)가 사용되고 있 다. 이 중 가장 널리 사용되고 있는 평탄성 지수는 IRI 로 국내도로의 평탄성 관리에도 IRI가 활용되고 있다.
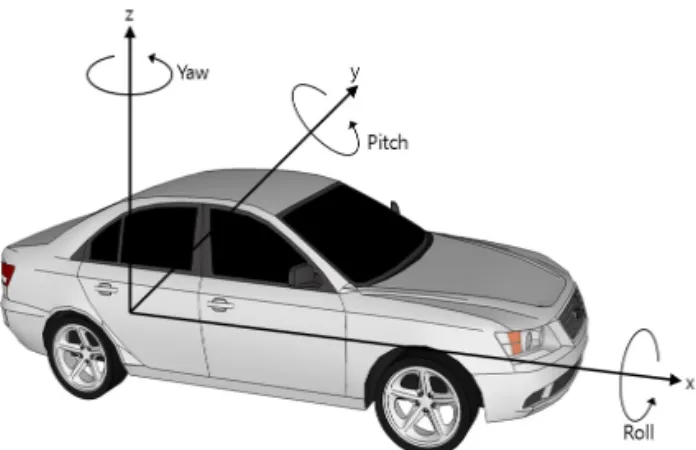
1980년대 초반 세계은행의 지원으로 개발된 IRI는 다 양한 형태의 노면 프로파일 수집장비와 호환성이 높고 주행하는 차량의 거동을 일정부분 반영하기 때문에 승 차감과의 상관성이 높은 장점이 있다. 반면, IRI에 반영 된 차량거동 모형은 쿼터카(Quater-car) 모델로 차량 거동 중 수직거동만 모사할 수 있다는 한계가 있다. 실 제 도로를 주행하는 차량에서는 수직거동(바운스) 이외 에 Fig. 1의 롤(Roll), 피치(Pitch), 요(Yaw)와 같은 다 양한 형태의 거동이 발생한다. 롤의 경우 노면 좌₩우 휠 패스 프로파일 편차에서 발생된다. 이러한 편차는 시공 상의 오차, 공용 중 포장파손, 포장하부 부등침하 등 다 양한 요인에 의해 발생할 수 있다. Fig. 2는 2015년 중 부내륙고속도로 김천JCT∼내서JCT 구간에서 측정한 좌측 및 우측 휠패스 IRI의 편차분포를 보여준다. IRI 편차가 0.4m/km 이하인 구간이 대다수를 차지하고 있 지만 0.4m/km 이상인 구간이 약 12%를 차지하고 있 다. 특히 IRI 편차가 1.0m/km이 넘는 구간도 1.8%나 되는 것으로 조사되었다. IRI는 노면의 프로파일에서
계산되는 값이기 때문에 좌₩우 휠패스의 IRI 편차가 큰 구간은 프로파일의 편차가 클 수 있고 결국 이러한 구간 에서는 차량의 수직거동 외에도 롤 거동이 크게 발생할 가능성이 높다.
한국도로공사는 2007년부터 상습 지정체 구간에 갓 길차로제를 도입하여 운영하고 있다. 갓길차로제는 비 상차로로 활용되는 고속도로 갓길에 LCS(Lane Control System) 신호기를 설치하고 혼잡상황에 따라 탄력적으로 갓길을 주행차로로 운영하는 제도이다. 갓 길차로제 적용 시 갓길의 적정 차로폭 확보를 위해 현재 3.6m로 운영되는 전체 도로의 차로폭을 3.5m로 재조 정하여 운영하게 된다. 이 경우 Fig. 3에서 보는 바와 같이 3.6m 차로폭에 맞춰 시공된 포장의 세로 줄눈이 휠패스로 옮겨져 Fig. 4와 같이 균열, 스폴링, 침하와 같은 파손이 집중적으로 발생하고 있는 실정이다.
2007년 시작된 갓길차로제는 2015년 말 기준으로 전국 적으로 확대되어 상습정체 30개 구간(연장 215km)에 적용되고 있다.
따라서 이러한 주행환경의 변화로 인하여 발생될 수 있는 승차감 변동성을 평가하고자 할 때 차량의 수직거 동 이외에도 롤, 요, 피치와 같은 회전거동의 고려가 필 요하다. 본 연구에서는 우선, 차량동역학 프로그램과 관 성항법장치(INS, Inertial Navigation System)를 이 용해 주행차량에서 발생하는 거동을 예측 및 실측하였 다. 또한, 주행차량의 주요거동을 모사할 수 있는 소규
Fig. 1 Dynamic Behavior of Vehicle (Roll, Yaw, Pitch)
Fig. 2 Distribution of Difference between Left and Right Wheel Path IRI (Kimcheon JCT∼Naeseo JCT)
Fig. 3 Longitudinal Joint Position Change due to the Implementation of LCS
Fig. 4 Longitudinal Joint Damage due to the
Implementation of LCS
모 시뮬레이터를 제작하고 승차감 평가패널을 구성하여 차량거동에 대한 승차감 민감도를 평가 및 분석하였다.
2. 승차감 평가
2.1. 도로의 승차감 평가방법
승차감 평가는 도로를 주행하는 차량 안에서 느껴지 는 쾌적함의 정도를 측정하는 것이기 때문에 객관적인 요소와 주관적인 요소가 복합적으로 작용한다. 따라서 노면의 평탄한 정도, 차량 종류와 상태, 날씨, 소음, 주 변환경 등의 객관적 요소와 평가자의 건강상태, 민감도 등 주관적인 요소들을 합리적으로 측정하고 평가하기 위한 다양한 방법들이 개발되어 왔다. Jiang 등은 승차 감을 평가하는 실험방법을 다음과 같이 4가지 유형으로 분류하고 있다(Jiang et al., 2001).
2.1.1. 주행실험을 통한 승차감 평가
실제 차량을 이용해 특정구간을 주행하면서 느낀 승 차감을 평가하는 방법으로 도로공학 분야에서 일반적으 로 사용하는 승차감 평가방법이다. 승차감을 평가하는 패널들은‘승차감 점수’와 같은 정량적 지표 또는‘만 족’, ‘불만족’과 같은 정성적 지표를 이용해 승차감을 평가한다. 실제 도로를 주행하면서 실험하기 때문에 노 면의 요철변화로 인해 발생하는 진동을 가장 잘 구현할 수 있으나 패널구성, 평가구간, 평가차량 등의 설계에 따라 승차감 평가결과의 객관성과 정확성이 달라진다.
2.1.2. 시뮬레이터를 이용한 승차감 평가
실제 자동차 실내를 모사한 차체에 유압 액추에이터 를 장착하여 피치, 롤, 요, 바운스와 같이 실제 주행차량 에 발생하는 진동을 구현하고, 이 때의 승차감을 평가하 는 방법이다. 차량의 서스펜션 시스템을 쉽게 모사할 수 있고 다양한 크기와 형태의 진동을 구사할 수 있는 장점 이 있다.
2.1.3. 좌석진동을 통한 승차감 평가
시뮬레이터와 동일하게 실제 도로가 아닌 실내에서 수행하는 평가방법으로 유압 액추에이터를 이용해 테이 블에 진동을 일으키고, 그 크기와 빈도에 따른 승차감을 평가하는 방법이다. 시뮬레이터와 유사하게 진동구현에 정현파를 사용하지만 수직진동만 모사할 수 있다는 단 점이 있다.
2.1.4. 주관적 측정을 통한 승차감 평가
이 방법은 일반적으로 차량의 주행성능을 평가하기 위해 사용되는 기법이다. 차량성능평가 전문가가 특정 구간을 주행하면서 차량의 승차감을 평가하기 때문에 차량 사이의 승차감 비교에 적합하다. 승차감을 평가하 는 전문가의 숙련도가 평가결과의 정확도에 큰 영향을 미친다.
2.2. 승차감 평가척도
평가자들이 도로에서 느끼는 승차감을 정량화하는 방 법 중 가장 일반적으로 사용되는 방법은 패널평가(panel rating)방법이다. 패널평가 과정에는 평가자 구성, 평가 구간의 선정, 평가척도 결정 등 다양한 요소가 포함되어 있으며, 이 중 평가척도는 평가자가 느낀 주관적인 체감 도를 객관적인 지표로 정량화해 표현하는 중요한 과정이 다. 도로분야에서 승차감 평가에 사용되는 일반적인 평 가척도 방법으로 AASHO/Weaver, Holbrook, Non- Segmented 평가방법이 있다.
세계 최초로 평탄성과 승차감 사이의 상관성 분석연 구에 사용된 AASHO 평가척도는 승차감을 5가지 척도 로 구분하고 추가적으로 승차감에 대한 수용도를 3단계 로 구분해서 평가하였다. 이후, Fig. 5의 (a)와 같이 평 가척도 양 끝에 제한을 둔 AASHO/Weaver 평가척도 가 제안되어 널리 사용되었다(Hudson, 1960).
이후 Hutchinson은 AASHO 평가척도 방법은 관용 효과, 후광효과, 중심집중효과, 고정효과 등의 오차로 인해 평가결과에 다양한 왜곡과 편견이 발생할 가능성 이 있다고 주장하였고(Hutchinson, 1963), 1969년 Holbrook은 이러한 오차를 줄이기 위해 Fig. 5의 (b) 와 같이 각 등급구간에 비율을 결정해주는 Holbrook 평가척도를 제안하였다(Holbrook, 1970). 하지만 Holbrook 평가척도는 평가자들에게 직접적이고 구체 적인 승차감 비율을 제시함으로써 제시된 비율에 맞추 어 승차감을 평가하도록 유도함으로써 결과를 왜곡시킬 수 있다는 문제점이 있다.
1967년 Torgerson은 평가척도의 구간분할이 오히려 평가자들을 유도하여 왜곡된 결과를 가져올 수 있다고 주장하였다. 그는 주관적 평가에 있어서 평가자의 자유 로운 선택이 중요하다고 생각하고, Fig. 5의 (c)와 같이 양 끝단에만 부연설명이 들어간 Non-segment 평가척 도를 제안하였다(Torgerson, 1967). 하지만, 이러한 비분할 평가척도는 평가자들이 직관적으로 평가하기 어 렵다는 문제점이 있다.
1983년 Nick과 Janoff는 포장의 승차감 패널평가에 자주 사용되는 이 세 가지 평가척도에 대한 연구를 수행 하였다. Nick과 Janoff는 평가척도가 승차감과 평탄성 사이의 상관성에 미치는 영향을 분석하였다. 앞서 설명 한 세 가지 평가척도를 사용하여 승차감 평가점수 사이 의 상관성을 분석한 결과 모두 R2가 0.9981~0.9989 사이로 나와 평가결과에 영향을 주지 않는 것으로 나타 났다. 이러한 결과를 토대로 Nick과 Janoff는 평가척 도의 종류보다 승차감 평가자에게 평가목표, 평가절차, 평가방법 등 평가와 관련된 교육을 잘 실시하는 것이 보 다 합리적인 평가결과의 도출을 위해 중요하다고 주장 했다(Nick과 Janoff, 1983).
3. 주행 시 차량거동 발생량 평가 3.1. 노면 프로파일 수집
주행하는 차량에서 발생하는 차량거동을 평가하기 위 해 영동선 내 5개 구간을 선정하고 도로포장상태조사장 비를 이용해 노면 프로파일을 수집하였다. Table 1과 같 이 5개의 구간 중 2개는 아스팔트 교면포장 구간이며, 3 개는 토공부 콘크리트 포장구간이다. 각 구간의 길이는 200m이며, MRI(Mean Roughness Index)값은 최소 1.13m/km∼최대 4.12m/km이다. 노면 프로파일은 도로 포장상태조사장비의 좌측 및 우측 후륜 뒤에 장착된 레 이저 센서와 가속도로 센서를 이용해 수집하였다.
3.2. 시뮬레이션을 이용한 차량거동 평가
도로를 주행하는 차량에서 발생하는 주요 거동요소를
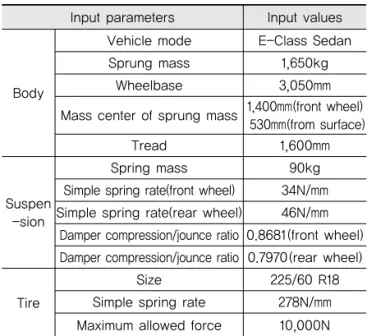
평가하기 위해 차량 동역학 해석 프로그램인 CarSIM 을 이용해 시뮬레이션을 실시하였다. 차량거동요소 시 뮬레이션에는 차량종류로 벤츠 E 클래스 세단을 사용했 으며 차체, 서스펜션, 타이어 등 시뮬레이션 입력값은 Table 2와 같다. 시뮬레이션에 적용한 노면 프로파일은 Table 1에서 제시한 구간에서 수집한 노면 프로파일을 사용하였다. 시뮬레이션 시 차량은 80km/h의 속도로 정속₩직선주행 하는 것으로 가정하였다.
Fig. 6은 CarSIM 프로그램에 입력해 예측한 구간 A의 차량거동요소(롤, 요, 피치, 바운스)를 정리한 것이다. 각 차량거동요소는 이동거리 0.5m마다 발생 예측된 값이다.
Fig. 6에서 보는 바와 같이 회전거동의 경우 피치, 롤, 요 순으로 크게 발생한 것으로 나타났다. 이러한 경향은 모 든 구간에서 동일하게 발생했다. 바운스의 경우 각 구간 의 최대발생량은 MRI가 가장 낮은 구간 D에서 0.034cm, MRI가 가장 높은 구간 C에서 0.102cm로 나타나 차량의 수직거동량을 반영하는 MRI와 유사한 경향을 보였다.
(a) AASHO/Weaver (b) Holbrook (c) Non-segment
Fig. 5 Ride Quality Rating Methods
Table 1. Pavement Surface Profile Evaluation Sections
Section Pavement type Under pavement MRI(m/km) A Hot mixed asphalt Bridge deck 2.12 B Jointed concrete Ground 2.95 C Jointed concrete Ground 4.12 D Jointed concrete Ground 1.13 E Hot mixed asphalt Bridge deck 2.58
Table 2. Input Parameters for the Vehicle Dynamic Simulation (CarSIM)
Input parameters Input values
Body
Vehicle mode E-Class Sedan
Sprung mass 1,650kg
Wheelbase 3,050mm
Mass center of sprung mass 1,400mm(front wheel) 530mm(from surface)
Tread 1,600mm
Suspen -sion
Spring mass 90kg
Simple spring rate(front wheel) 34N/mm Simple spring rate(rear wheel) 46N/mm
Damper compression/jounce ratio 0.8681(front wheel) Damper compression/jounce ratio 0.7970(rear wheel)
Tire
Size 225/60 R18
Simple spring rate 278N/mm Maximum allowed force 10,000N
Fig. 6 Simulation Result of Section A about Pitch,
Roll, Yaw and Bounce
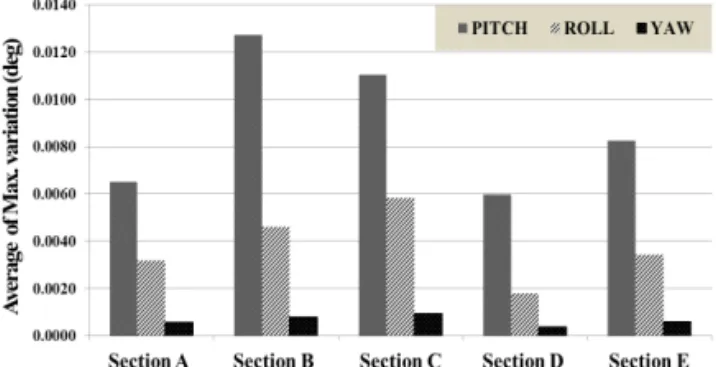
Fig. 7은 시뮬레이션을 통해 예측한 구간별 평균변화 량을 정리한 것이다. 요의 경우 피치에 비해 최소 2.9%~최대 6.2%가 발생하는 것으로 나타났다. 한편, Roll에 비해 최소 6.4%~최소 8.1%로 발생하는 것으로 예측되었다.
3.3. 현장실험을 통한 차량거동 평가
실제 주행하는 차량에서 차량거동을 실측하기 위해 Fig. 8과 같이 중형차량을 선정하여 실험을 진행하였 다. 실험차량의 차량거동 측정을 위해 트렁크 바닥에 관 성항법장치를 설치하였으며 이동거리 측정을 위해 좌측 뒷바퀴에 거리측정기(DMI, Distant Measuring Indicator)를 장착하였다. 또한, 관성항법장치의 보조 장치로 운전석 및 조수석 전면에 가속도 센서를 장착하 였다. 시간을 기반으로 측정되는 차량거동값을 거리기 반으로 동기화하기 위해 관성항법장치의 데이터와 거리 측정기의 데이터를 동기화해 주는 장치를 설치하였다.
실험차량은 80km/h의 속도로 Table 1에서 제시한 각 구간을 주행하면서 거동요소를 측정하였다.
주행 시 발생하는 차량거동요소 중 요는 측정 시 운전 자의 운전행태 영향을 크게 받는다. 운전자가 주행 중에 좌측 또는 우측으로 편향되게 주행하는 경우 노면 요의
발생량이 과다하게 측정될 수 있다. 따라서, 운전행태로 인한 측정값 오류를 배제하기 위해 시뮬레이션 실험결 과와 다르게 분석단위구간에서 측정한 거동요소의 최대 값과 최소값의 편차를 이용해 단위거리별 최대변화량을 산출하였다. Fig. 9는 구간 A에서 측정한 차량거동요소 의 단위거리별 최대변화량이다.
Fig. 10은 각 구간의 차량거동 평균 최대변화량을 정 리한 것이다. 시뮬레이션 결과와 동일하게 피치의 발생 량이 가장 큰 것으로 나타났으며 요가 가장 적게 발생하 는 것으로 나타났다. 피치의 경우 MRI가 가장 불량한 구간C 보다 구간B의 평균발생량이 더 큰 것으로 나타 났다. 반면, 롤과 요의 경우는 MRI와 동일한 순서로 평 균발생량이 측정된 것으로 나타났다. 요 발생량의 경우, 피치의 6%∼9%, 롤의 16%∼20% 수준으로 시뮬레이션 결과보다는 다소 크게 발생했지만 피치와 롤에 비해 매 우 적은 수준으로 발생하고 있다.
시뮬레이션과 현장실험 결과 주행차량의 요 발생량은 피치나 롤에 비해 미미한 것으로 나타났다. 이러한 결과 를 고려하여 시뮬레이터를 이용한 차량거동요소의 승차 감 민감도 평가에는 회전거동 중 요를 제외한 피치와 롤 만 반영하였다.
Fig. 8 Test Vehicle and Vehicle Behavior Measurement System
Fig. 9 Field Test Result of Section A about Pitch, Roll, Yaw and Bounce
Fig. 10 Measured Average Variation of Pitch, Roll and Yaw (Field Test Result)
Fig. 7 Predicted Average Variation of Pitch, Roll and
Yaw (Simulation Result)
4. 시뮬레이터를 활용한 승차감 평가 4.1. 승차감 평가 시뮬레이터
차량거동 모사 시뮬레이터는 Fig. 11과 같이 자동차 의 운전석을 모사한 형태로 크게 운전석, 액츄에이터, 제어기로 구성되어 있다. 이외에 실제 운전석에 착석한 느낌을 주기 위해 핸들과 도로 주행환경을 시연하는 모 니터가 전면에 장착되어 있다.
운전석에는 소형 승용차 운전석 시트가 장착되어 있 으며 시트 프레임 하부에는 차량거동 모사를 위한 3개 의 전기모터 구동식 액추에이터가 장착되어 있다.
Fig. 12와 같이 3개의 액추에이터 중 두 개는 시트 프
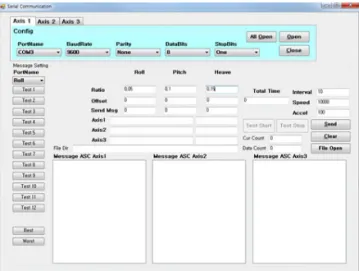
레임 하부 전면, 한 개는 시트 프레임 하부 후면에 장 착되어 있다. 3개의 액추에이터 높이를 변화시켜 롤, 피치, 바운스 거동을 모사한다. 액추에이터와 연결된 제어기에는 Fig. 13과 같이 각 축의 높이 변화값과 속 도를 제어할 수 있는 시뮬레이터 구동 프로그램이 설 치되어 있다. 이 구동 프로그램을 이용해서 시뮬레이 터에 발생시키는 차량 거동요소 종류, 진폭, 주기를 설 정한다.
각 액추에이터의 상₩하 가동범위는 150mm(±
75mm)이며 롤은 전면에 장착된 2개의 액추에이터의 높이 편차로 모사하고, 피치는 전면과 후면의 액추에이 터의 높이 편차로 모사한다. Table 3은 소형 시뮬레이 터의 차량거동 모사 성능을 정리한 것이다.
4.2. 승차감 평가 패널구성
시뮬레이터를 이용한 승차감 평가에는 총 18명이 참 가하였다. 평가자들은 20~40대의 도로분야 연구자들 로 구성되었다. Table 2에서 보는 바와 같이 차량 거동 요소 반영에 따른 실험 횟수가 총 144회에 이르기 때문 에 평가자가 모든 실험변수에 대해 평가하는 경우 집중 력이 떨어질 수 있다고 판단하여 평가자들의 연령대가 고르게 분포되도록 3개의 그룹으로 나누었다. 각 그룹 을 차량거동요소, 주기, 진폭에 고르게 참가할 수 있도 록 Table 4와 같이 실험을 수행하였다.
평가자들에게 실험 실시 전 실험목적 및 실험결과의 활용, 승차감 평가방법, 차량거동 모사 시뮬레이터에 대 해 교육하였으며, 시뮬레이터에서 전달되는 차량거동에 대해 인지시키기 위해 3회 이상 임의의 파형에 대해 사
Fig. 11 Small Scale Vehicle Behavior Simulator
Table 3. Performance of Small Scale Simulator
Roll Pitch Bounce
Max. +10 deg +7 deg +75mm
Min. -10 deg -7 deg -75mm
Cycle Max. 40Hz(0.025second)
Fig. 12 Configuration and Specification of Small Scale Simulator
Fig. 13 Small Scale Simulator Operating Program
Table 4. Experimental Variable of Ride Quality Evaluation Using Simulator
Vehicle
behavior Roll Pitch Bounce Roll
+ Bounce
Pitch + Bounce
Roll +Pitch +Bounce Cycle(Hz) 1, 2, 4, 8, 16 1, 4, 16
Frequency
(°, cm) 0.005, 0.01, 0.02, 0.04, 0.08, 0.16
No. of case 30 30 30 18 18 18
전 실험을 실시하였다. 평가자들은 시뮬레이터에서 차 량거동을 모사한 진동을 느낀 후 AASHO/Weaver 평 가척도를 변형한 평가지에 승차감을‘매우만족(1점)’부 터‘매우불쾌(5점)’까지 5단계로 평가하였다(Fig. 14).
4.3. 승차감 평가실험
시뮬레이터를 이용한 승차감 평가는 두 가지 목적을 위해 수행하였다. 첫 번째는 개별 차량 거동요소의 승차 감 경계치 분석으로 롤, 피치, 바운스가 각각 개별적으 로 작용할 때 운전자들이 느끼는 승차감의‘만족’, ‘불 만족’경계치를 평가하고자 하였다. 두 번째는 롤+바운 스, 피치+바운스, 롤+피치+바운스와 같이 차량 거동요 소가 두 개 이상 복합적으로 작용하는 경우 운전자들이 느끼는 승차감의‘만족’, ‘불만족’경계치를 평가하고 자 하였다.
시뮬레이터를 이용해 피실험자에게 부여할 수 있는 차량거동요소의 형태는 Sin파의‘주기’와‘진폭’이다.
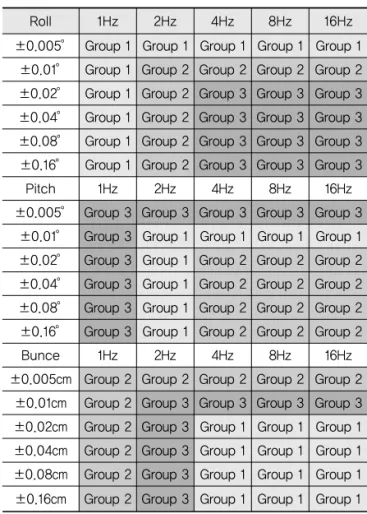
주기는 ISO 2631에서 제시하는 인체 가중치 주파수 대 역을 고려하여 1Hz부터 16Hz까지 1옥타브씩 증가시켜 총 5개로 선정하였다. 진폭의 경우도 현장 주행시험 자 료를 토대로 롤과 피치는 0.005°부터 0.16°까지(바운 스의 경우 0.005cm부터 0.16cm) 1옥타브씩 증가시켜 총 6개로 선정하였다. 차량거동요소의 복합작용 시에는 실험횟수를 줄이기 위해 주기 변수 중 2Hz와 8Hz를 제 외하고 3개에 대해서만 실험을 진행하였다. 각 경우에 대해 실험진행 시간은 차량이 80km/h로 200m 구간을 주행하는 것을 가정하여 9초로 제한하였다. Table 5와 Table 6은 시뮬레이터 승차감 평가시험에 사용된 변수 의 종류와 실험 횟수를 정리한 것이다.
Table 5. Ride Quality Evaluation Group for Single Vehicle Behavior (unit`:`° , cm)
Roll+Bounce 1Hz 4Hz 16Hz
±0.005° Group 1 Group 1 Group 1
±0.010° Group 1 Group 2 Group 2
±0.020° Group 1 Group 2 Group 3
±0.040° Group 1 Group 2 Group 3
±0.080° Group 1 Group 2 Group 3
±0.160° Group 1 Group 2 Group 3
Pitch+Bounce 1Hz 4Hz 16Hz
±0.005° Group 3 Group 3 Group 3
±0.010° Group 3 Group 1 Group 1
±0.020° Group 3 Group 1 Group 2
±0.040° Group 3 Group 1 Group 2
±0.080° Group 3 Group 1 Group 2
±0.160° Group 3 Group 1 Group 2 Roll+Pitch+Bounce 1Hz 4Hz 16Hz
±0.005cm Group 2 Group 2 Group 2
±0.010cm Group 2 Group 3 Group 3
±0.020cm Group 2 Group 3 Group 1
±0.040cm Group 2 Group 3 Group 1
±0.080cm Group 2 Group 3 Group 1
±0.160cm Group 2 Group 3 Group 1
Roll 1Hz 2Hz 4Hz 8Hz 16Hz
±0.005° Group 1 Group 1 Group 1 Group 1 Group 1
±0.01° Group 1 Group 2 Group 2 Group 2 Group 2
±0.02° Group 1 Group 2 Group 3 Group 3 Group 3
±0.04° Group 1 Group 2 Group 3 Group 3 Group 3
±0.08° Group 1 Group 2 Group 3 Group 3 Group 3
±0.16° Group 1 Group 2 Group 3 Group 3 Group 3
Pitch 1Hz 2Hz 4Hz 8Hz 16Hz
±0.005° Group 3 Group 3 Group 3 Group 3 Group 3
±0.01° Group 3 Group 1 Group 1 Group 1 Group 1
±0.02° Group 3 Group 1 Group 2 Group 2 Group 2
±0.04° Group 3 Group 1 Group 2 Group 2 Group 2
±0.08° Group 3 Group 1 Group 2 Group 2 Group 2
±0.16° Group 3 Group 1 Group 2 Group 2 Group 2
Bunce 1Hz 2Hz 4Hz 8Hz 16Hz
±0.005cm Group 2 Group 2 Group 2 Group 2 Group 2
±0.01cm Group 2 Group 3 Group 3 Group 3 Group 3
±0.02cm Group 2 Group 3 Group 1 Group 1 Group 1
±0.04cm Group 2 Group 3 Group 1 Group 1 Group 1
±0.08cm Group 2 Group 3 Group 1 Group 1 Group 1
±0.16cm Group 2 Group 3 Group 1 Group 1 Group 1
Table 6. Ride Quality Evaluation Group for Combined Vehicle Behavior (unit : ° , cm)
Fig. 14 Ride Quality Evaluation Sheet
5. 차량거동요소의 승차감 민감성
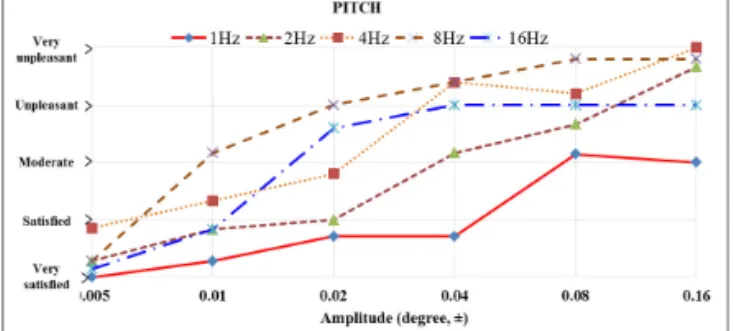
5.1. 차량거동요소 단일 작용 시 승차감 민감성 롤 거동에 대한 시뮬레이터 승차감 평가결과 Fig. 15 와 같이 거동량이 커질수록 승차감이 불쾌하다고 느끼는 것으로 나타났다. 이러한 경향은 8Hz에서 가장 크게 나 타났으며 오히려 주기가 짧아지면 불쾌하게 느끼는 정도 가 작아지는 것으로 나타났다. Fig. 16을 보면 피치 거동 에 대한 시뮬레이터 승차감 평가결과도 롤과 유사하게 거동량이 커질수록 승차감이 불쾌하다고 느끼는 것으로 나타났다. 롤 거동과 동일하게 주기가 8Hz인 경우 가장 큰 불쾌감을 느끼는 것으로 나타났으나 주기를 16Hz로 증가시키면 떨어지는 불쾌감의 정도는 롤에 비해 작은 것으로 나타났다. Fig. 17은 바운스 거동에 대한 시뮬레 이터 승차감 평가결과를 정리한 것이다. 롤, 피치와 동일 하게 거동량이 클수록 승차감이 불쾌하다고 느끼고 있으 나 바운스의 경우, 4Hz와 8Hz에서 느끼는 불쾌감이 비 슷한 수준인 것으로 나타났다. 다른 거동들과 동일하게 16Hz에서는 불쾌감 수준이 낮아지는 것으로 나타났다.
Fig. 18은 시뮬레이터를 이용한 롤, 피치, 바운스 거 동에 대한 승차감 평가결과 중‘보통’기준을 이용해 승 차감 만족도의 경계값을 정리한 실험결과이다. 피치와 바운스는 유사한 수준으로 승차감에 대한 민감도를 보 이는 반면, 롤은 승차감에 대한 민감도가 두 거동요소보 다 다소 낮은 것으로 나타났다. 특히, 롤은 주기가 8Hz 를 넘어가면 진폭에 대한 승차감 민감도가 크게 떨어지 는 것으로 나타났다.
5.2. 차량거동요소 복합 작용 시 승차감 민감성 롤과 바운스 복합거동에 대한 시뮬레이터 승차감 평 가결과는 Fig. 19와 같다. 진폭이 커질수록 승차감이 불 쾌하다고 느끼는 것으로 나타났으며, 이러한 경향은 4Hz와 16Hz 모두 유사하게 나타났다. 특히, 차량 거동 요소가 하나만 작용하는 경우와 달리 16Hz에서 진폭이 0.04(deg, cm)보다 낮은 경우에는 4Hz보다 불쾌감 정 도가 낮고 높을 경우에는 불쾌감 정도가 높은 것으로 나 타났다.
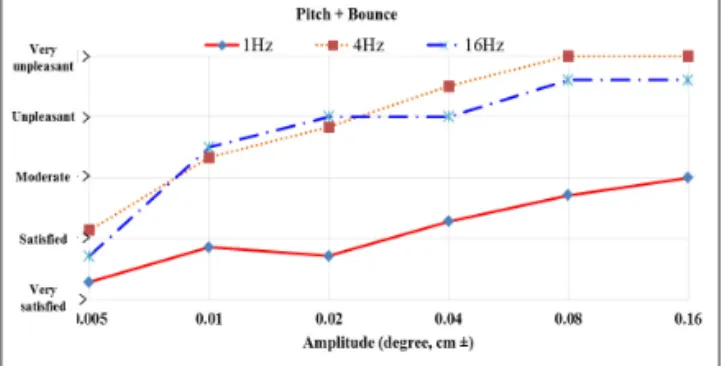
Fig. 20에서 보는 바와 같이 피치와 바운스의 복합거동 에 대한 시뮬레이터 승차감 평가결과도 롤과 바운스 작용 시와 유사하게 거동량이 커질수록 승차감이 불쾌하다고 느끼는 것으로 나타났다. 롤과 바운스의 복합거동과 유사 하게 낮은 진폭에서는 16Hz에서의 불쾌감이 8Hz보다 낮
Fig. 15 Result of Ride Quality Evaluation according to Roll
Fig. 16 Result of Ride Quality Evaluation according to Pitch
Fig. 18 Ride Quality Satisfaction Threshold for Single Vehicle Behavior
Fig. 19 Result of Ride Quality Evaluation according to Roll and Bounce
Fig. 17 Result of Ride Quality Evaluation according to
Bounce
고 높은 진폭에서는 불쾌감이 높은 것으로 나타났다.
Fig. 21은 롤, 피치, 바운스 복합거동에 대한 시뮬레 이터 승차감 평가결과를 정리한 것이다. 앞서 두 경우와 유사하게 진폭이 커질수록 불쾌감을 느끼는 것으로 나타 났다. 낮은 진폭에서는 16Hz에서의 불쾌감이 8Hz보다 낮고 높은 진폭에서는 불쾌감이 높은 것으로 나타났다.
Fig. 22는 시뮬레이터를 이용한 롤, 피치, 바운스의 복합거동에 대한 승차감 평가결과 중‘보통’기준을 이 용해 승차감 경계치로 표현한 그래프다. 롤과 바운스, 피치와 바운스, 롤과 피치와 바운스 모두 유사한 경향을 보이고 있으나 낮은 진동수에서 피치와 바운스 복합거 동의 승차감 만족도 수준이 크게 증가하는 것으로 나타 나 민감도가 떨어지는 것으로 나타났다.
6. 결론 및 향후 연구과제
현재 사용 중인 평탄성 지수에서 반영하는 차량거동 요소 이외에 롤, 피치, 요와 같은 회전거동요소가 승차 감에 미치는 영향을 평가하였다.
주행하는 차량에 발생하는 주요 거동요소를 선정하기 위해 시뮬레이션과 현장실험을 통해 발생량을 평가하였 다. 그 결과 회전거동은 피치가 가장 크게 발생하고 롤, 요 순으로 나타났다. 세 가지 차량의 회전거동 요소 중 요 발생량은 다른 두 회전거동에 비해 미미한 것으로 나 타나 시뮬레이터를 이용한 승차감과의 상관성 분석에 사용할 차량거동요소로 요를 제외한 바운스, 롤, 피치를 선정하였다.
차량의 롤, 피치, 바운스 거동을 모사할 수 있는 소규 모 시뮬레이터를 제작하고 승차감 만족도에 대한 패널 평가를 실시하였다.
차량거동요소 단일작용 시, 모든 차량거동요소에 대 해 전반적으로 진폭이 증가할수록 승차감이 불량하다고 느끼는 것으로 나타났다. 주기를 변화시킨 결과 진폭변 화에 상관없이 8Hz에서 승차감에 가장 민감한 반응을 보이는 것으로 나타났다. 또한, 차량의 회전거동인 롤과 피치를 비교하면 피치거동에 대해 보다 민감하게 반응 하는 것으로 나타났다.
차량거동요소 복합거동 시 주기가 4Hz 이상에서는 롤과 바운스, 피치와 바운스, 롤과 피치와 바운스 조합 모두 승차감 민감도가 유사한 것으로 나타났다. 반면, 1Hz에서는 피치와 바운스 조합의 승차감 민감도가 다 른 두 조합에 비해 크게 낮아지는 것으로 나타났다.
전체적으로 볼 때, 현재 사용되는 평탄성 지수에서는 고려하지 않는 차량의 회전거동인 롤과 피치도 승차감 평가에 명확하게 영향을 미치는 것으로 나타났다. 따라 서, 현재 평탄성 지수에서 고려하고 있는 바운스와 회전 거동인 롤, 피치를 이용한 조합을 통해 보다 승차감에 민감한 평탄성 지수를 개발할 수 있을 것으로 판단된다.
REFERENCES