58
대조차 만리포 해안의 지상 LiDAR와 MBES를 이용한 정밀 지형/수심 측량 및 조간대 접합을 통한 정밀 지형도 작성
Construction of High-Resolution Topographical Map of Macro-tidal Malipo beach through Integration of Terrestrial LiDAR Measurement and MBES
Survey at inter-tidal zone
심재설*·김진아**·김선정*·김상익*
Jaeseol Shim*, Jinah Kim**, Seonjeong Kim* and Sangik Kim*
요 지 :본 논문에서는 지상 LiDAR 및 MBES(다중빔 음향측심기)를 이용하여 정밀 지형 및 수심측량을 실시하였 고, 조간대 영역의 육도-해도 접합을 통하여 대조차 해안인 만리포에 대한 정밀 지형도를 작성하였다. 제한된 시간 내에 조간대 영역의 충분한 지형정보 획득을 위하여 간조시 지상 LiDAR 및 DGPS를 차량지붕에 탑재하여 이동
·정지·스캐닝의 해변 전체의 지형정보를 획득하였고, 이와 동시에 만조시 MBES를 통하여 수심측량을 실시하였으며
조위계 설치와 목측을 통한 조위관측의 병행을 통하여 수심보정자료 및 만리포의 평균해면 추산자료로 사용하였다.
조간대 정합을 위해 지형 및 수심자료의 수직좌표계 기준면은 인천 평균해면으로 단일화하였으며, 조간대 평균 중 첩오차는 약 2~6 cm 이내로 나타났다. 또한 지상 LiDAR 자료의 정확도 검증을 위해 RTK-DGPS 측량을 동시에 실시하여 수직좌표값을 비교한 결과 평균 제곱근 오차가 약 4~7 cm 이내로 나타났다. 정밀지형도 작성은 GIS 기 반 자료처리를 통하여 50 cm 해상도를 갖는 수치표고자료로 생산하였으며, 이는 현재 연안지역 침수범람 예측을 위 한 폭풍해일 침수범람 예측모델의 정밀 입력자료로 사용되고 있다. 또한 장기간에 걸친 주기적 측량 자료와 측량 시의 인위적 해변 변화량 및 해양환경정보를 함께 고려하여 3차원 공간분석을 실시한다면 침·퇴적양의 정확한 산 출을 통하여 연안 모니터링에도 효과적으로 활용될 수 있을 것이다.
핵심용어 :정밀 지형도, 대조차 해안, 지상 LiDAR, MBES(다중빔 음향측심기)
Abstract : In this paper, we have constructed high-resolution topographical map of macro-tidal Malipo beach through integration of terrestrial LiDAR measurement and MBES survey data at inter-tidal zone. To acquire the enough information of inter-tidal zone, we have done terrestrial LiDAR measurement mounted on the roof of vehicle with DGPS through go-stop-scan method at the ebb tide and MBES depth surveying with tide gauge and eye staff measurement for tide correction and MSL calculation at the high tide all together. To integrate two kinds of data, we have unified the vertical coordination standard to Incheon MSL. The mean error of overlapped inter-tidal zone is about 2~6 cm. To verify the accuracy of terrestrial LiDAR, RTK-DGPS measurement have done simultaneously and the difference of Z value RMSE is about 4~7 cm. The resolution of Malipo topographical map is 50 cm and it has constructed to DEM (Digital Elevation Model) based on GIS. Now it has used as an input topography information for the storm-surge inundation prediction models. Also it will be possible to use monitoring of beach process through the long-term periodic measure- ment and GIS-based 3D spatial analysis calculating the erosion and deposition considering with the artificial beach transition and coastal environmental parameters.
Keywords : High-resolution topographical map, Macro-tidal beach, Terrestrial LiDAR, MBES
1. 서 론
최근 전 세계적으로 기후변화에 따른 해수면 상승으로 인 하여 고파랑 내습이나 폭풍해일로 인한 침수범람 등 자연재 해로 인한 연안지역의 인명 및 재산피해가 급증하고 있다. 또
한 연안지역은 해양환경변화 및 해안의 인위적 구조물 건설 등으로 인한 연안 침식현상도 문제가 되고 있으며, 해수욕장 의 경우 매년 많은 양의 모래를 보충하고 있다. 따라서 이러 한 연안지역의 자연재해 저감 및 침식문제 해결을 위해서는 폭풍해일 및 침수범람의 정확한 예측과 연안 모니터링을 통
*한국해양연구원 기후·연안재해연구부(Climate Change & Coastal Disaster Research Depart. KORDI, Ansan P.O. Box29, Seoul 425- 600, Korea)
**한국해양연구원 해양환경·방제연구부(Corresponding author: Jinah Kim, Marine Environment & Pollution Prevention Research Depart. KORDI, Ansan P.O. Box29, Seoul 425-600, Korea. [email protected])
한 연안관리가 필요하며, 이는 정확하고 정밀한 연안지역의 지 형정보 획득을 통해 침수범람 예측의 정확도 및 연안관리의 효율성을 향상시킬 수 있다. 특히 연안지역에서는 파랑과 조 석의 영향을 받는 해륙의 경계지대인 조간대 영역의 처리가 중요하며, 우리나라 서해안 대조차 해안의 경우 조간대 영역 의 정확하고 정밀한 지형정보 획득은 침수범람 예측 및 조석 에 의한 장주기 변화와 계절별로 내습하는 파랑에 의한 동적 변화를 고려한 장기적인 해안변화에 필수적이다.
연안지역 지형정보 획득을 위한 일반적인 방법으로는 국토 지리정보원에서 발행하는 수치지형도와 국립해양조사원에서 발 행하는 수치해도를 이용하는 방법이다. 대부분의 수치지형도 는 1:25,000 및 1:5,000의 축척을 가지며, 1:5,000 축척의 경 우 주곡선의 간격이 5 m이다. 최근 대도시 위주로 1:1,000 축 척의 지형도가 작성되고 있으나 일부 지역으로 제한적이다. 수 치해도의 경우는 주로 항해를 위한 목적으로 제작되어 연안 근처에서는 수심정보가 불충분하다. 연안지역 침수피해의 최 소화를 위한 재해도 작성에 관한 소방방재청 및 국토해양부 검토안에 따르면 해안 침수예상도는 1:5,000 이상의 축척으로 제작되며, 침수예상지역을 나타내는 침수심은 50 cm 단위로 표현하도록 하고 있어 기존의 지형도 및 수치해도로는 정확 한 침수범람 예측을 위한 충분한 지형정보 획득이 어렵다고 볼 수 있다(소방방재청, 2008).
또한 2002년부터 국립해양조사원에서 추진하고 있는 해안 선 조사측량 및 DB구축사업에서는 현재 해안선의 정확한 위 치를 확정하고, 향후 지형의 국지적 침식, 퇴적현상에 대한 주 기적으로 모니터링을 실시하고 있으나, 이는 해안 인근에 몇 몇 기준점을 설치하고 그 기준점으로부터 해안선까지의 거리 와 주변지형을 측정함으로써 연안지역에 대한 연속적인 지형 정보의 취득에는 제한적이다. 그리고 국토해양부(2006)의 연 안침식방지 종합대책수립을 위한 조사연구에서는 주요 연안의 연안침식 모니터링 체계구축을 위하여 해운대, 대천 등의 다 수 해수욕장에 비디오 모니터링 체계를 구축하여 운영하고 있 으나, 비디오 분석을 통한 cm급 해상도와 정확도를 갖는 연 속적인 수치지형정보 획득에는 어려움이 있다. 최근에는 보다 정밀하고 정확한 지형정보 획득을 위하여 인공위성 영상(국토 지리정보원, 2007)이나 항공사진, 라이다 측량 또는 RTK- DGPS 정지측량 등의 다양한 방법이 제안되고 있으나 대상지 역이 제한적이거나 시작단계에 불과하여 연속적인 정밀지형정 보 취득에는 어려움이 따른다. 최근 국토지리정보원(2009a, 2009b) 은 다차원 공간정보 구축 표준매뉴얼 및 항공 레이져 측 량작업 규정 개정 등을 통해 항공 LiDAR(Light Detection and Ranging) 측량을 통해 1 m
2당 2.5점의 점밀도를 갖는 지형정 보 제작을 실시하고 있다.
태풍해일 예측이나 침수범람 모의시 정확하고 정밀한 연안 지역 특히 조간대 영역의 지형자료 확보는 매우 중요하며, 해 안 침수예상도 제작시 50 cm 간격의 침수심 표시를 고려할 때 1:5,000 축척의 경우 표고점 오차는 ±1.66 m로 연안의 지형상
태를 충분히 반영하기 어렵다. 따라서 1:1,000(표고점 오차
±0.33 m) 축척 이상의 해상도를 갖는 지형정보 및 충분한 조 간대 영역의 지형정보 획득방법이 필요하다. SHOALS (Scanning Hydrographic Operational Airborne LiDAR Survey) 의 경우 지형측량과 수심측량이 모두 가능한 녹색 파장대의 레이저를 이용한 LiDAR 장비로, 혼탁하지 않은 투명한 상태를 기준으 로 약 50 m 정도의 수심 측량이 가능하다. 이는 육상 지형 및 해상 수심 측량을 동시에 할 수 있다는 장점이 있으나, 수심 이 깊어지거나 물의 혼탁도가 높을 경우 수중에서 레이저 광 선의 산란으로 정확한 반사값을 얻기 어렵다(정 등, 2008; 최 등, 2004). SHOALS는 일반적으로 세키수심(Secchi depth)의 3배 이하로 측량이 가능하나 서해안의 경우 탁도가 심한 경우 세키수심 1 m 확보도 어려우므로 결국 3 m 수심측량도 어렵 다고 볼 수 있다.
따라서 본 논문에서는 사리 간조시 지상 LiDAR 측량을 통 하여 대조차 해안인 만리포 해변의 정밀 지형측량을 실시하 고 이와 동시에 만조시 다중빔 음향측심기를 이용하여 정밀 수심조사를 실시하였으며, VRS 및 RTK-DGPS 측량 과 조위 관측을 동시에 실시하여 정확도 검증과 수직 좌표계의 단일 화를 통한 육도-해도 접합 고해상도 정밀 지형도를 작성하였 다. 현재 정밀 지형도는 폭풍해일과 침수범람 예측결과의 향 상을 위한 정밀 입력 자료로 사용되고 있으며, 정기적 측량자 료의 GIS 기반 3차원 공간분석을 통하여 해변의 형태학적 변 화를 살펴보았다. 이는 측량시의 해양환경자료 및 양빈과 같 은 인위적 변화량을 함께 고려하여 분석한다면, 정확한 침·퇴 적량 산정을 통한 연안 모니터링을 통한 연안관리에 효과적 으로 활용할 수 있을 것이라 예상된다.
2. 연안지역 정밀측량
2.1 지상 LiDAR를 이용한 정밀 지형측량
본 연구에서는 대조차 해안인 만리포를 조사지역으로 선정 하여, 지상 LiDAR를 이용한 정밀 지형측량을 수행하였다. 충 청남도 태안에 위치한 만리포 해변은 길이 약 1.8 km, 폭 약 300 m 로 완만한 경사를 이루고 있으며, 겨울철 북서파랑에 의 한 해안침식 영향이 큰 지역이다. Fig. 1은 조사영역인 만리 포의 항공영상과 등고선을 중첩하여 보여주고 있다.
LiDAR 는 송신기로부터 발사된 레이저 펄스가 목표물에 반 사되어 수신기에 도달하는 시간을 측정하는 측거기술과 레이 저의 발사각도를 매우 정밀하게 측정하는 측각기술이 결합된 3 차원 레이저 측량 장비이다. 국내외에서 사용되는 지상 LiDAR 의 측거 정도는 5 mm(100 m 전방) 이내, 측각 정도는 0.002°
이내이다. LiDAR에서 얻어지는 자료는 x, y, z의 3차원 공간
좌표를 가지는 측점군(point cloud)이며, 1회 스캔으로 수백 또
는 수천만 개의 측점군을 얻을 수 있다. 또한 함께 취득되는
레이저의 반사 강도의 분석을 통하여 대상체의 표면 특성을
분류하는데 사용하기도 한다(Ahmed and Elaksher, 2008).
LiDAR 는 운영방식에 따라 항공기에 탑재되는 항공 LiDAR와 지상에서 운영되는 지상 LiDAR로 분류된다. 항공 LiDAR의 경우 움직이는 항공기에서 측량이 이루어지므로 수십 km범위 의 지역을 수십 cm의 정확도와 정밀도로 3차원 측량할 수 있 는 반면, 지상 LiDAR의 경우는 항공 LiDAR에 비해 조사 범 위가 수백 m로 짧으나 정확도는 수 mm로 매우 높다. 또한 성
인 1~2명이 운용할 수 있을 정도로 소형화되어있어 운용성 월 등히 높다. 따라서 1-2 km 길이의 연안지역에 대하여 높은 정 확도와 정밀도로 해안지형의 반복적 조사를 통하여 모래유실 과 같은 국소적 영역의 정밀한 지형변화의 분석을 위해서는 지상 LiDAR가 적합하다(Lisa et al., 2008; Brzank and Heipke, 2006; Harley et al., 2006; Paul et al., 2006; Shui-sen et al., 2005; Stockdon et al., 2002).
만리포 해변 측량에 사용된 지상 LiDAR는 Riegl사의 LMS- Z420i 인 장거리용 고해상도 3차원 레이저 스캐너로, 최대 1 km 이내 지형을 1 cm 이하의 오차로 지형정보를 획득할 수 있다.
만리포 해변의 보다 많은 지형정보 획득을 위하여 조위차가 큰 사리 저조시 즉, 물이 많이 빠져 백사장이 가장 많이 드러 난 시점에 Fig. 2와 같이 지상 LiDAR 및 DGPS 수신기를 차 량지붕에 장착한 조사차량이 해변으로 들어가 약 25 m 간격 으로 이동·정지를 반복하면서 전체 해변 정보를 취득하기 위 하여 총 20회 이상의 스캐닝을 실시하였다. 전체 해변지형 스 캐닝에 소요되는 시간은 약 1시간 이내이며, 취득한 측점군 중 사람 및 갈매기 등의 불필요한 측점 제거 작업(Simon et al., 2008)과 지리좌표계 변환을 위한 후처리 작업을 수행하고 나 면 Fig. 3과 같은 측점군을 획득하게 된다.
LiDAR 측량을 통해 취득된 측점군의 3차원 좌표는 LiDAR 장비의 내부 원점으로부터 수평 및 수직 축에 의해 결정되는 기계 중심의 상대좌표이기 때문에 여러 지점에서 조사된 위 치와 자세가 다른 LiDAR 데이터를 지리좌표계상의 하나의 자 료로 정합는 과정이 필요한데, 이를 위한 가장 일반적인 방법은 조사지역에 최소 3개 이상의 기준점을 설치하고 후처리시에
Fig. 1. Map of Malipo beach with aerial photo from NAVER.Fig. 2. Vehicle mounted Terrestrial LiDAR with VRS-RTK system and Measurement of Malipo beach.
Fig. 3. Point Cloud of Malipo beach at Feb. and Mar. 2008.
기준점 좌표를 이용하여 정합하는 방법이다. 그러나 이러한 방 법은 기준점 설치와 추가적인 측량이 병행되어야 하며, 조사 지역이 넓을 경우 설치하여야 할 기준점의 개수가 많아야 하 는 단점이 있다. 지상 LiDAR 자료의 경우는 원점의 좌표와 자세에 대한 정보만 없을 뿐 측점간의 공간적 왜곡은 없다. 다 시 말해 완전한 평면을 스캔하였을 경우 지상 LiDAR 자료에 서는 특정 방향으로 경사져있는 완전한 평면으로 나타나게 된 다. 결국 원점의 좌표와 자세에 대한 정확한 정보만 제공한 다면 지상 LiDAR 자료는 실제와 동일하게 된다. 그리고 지 상 LiDAR는 매우 조밀한 측점을 취득할 수 있다는 특성이 있다. 밀도높은 측점은 대상체를 정밀한 3차원 모델로 만들 수 있게 해주며, 서로 다른 위치에서 스캔한 자료라도 각 지 점에서 얻은 3차원 모델을 이용하여 자료를 정확히 정합시킬 수 있다. 그러나 서해안의 조간대 지역은 지형기복의 변화가 거의 없어 3차원 모델만을 이용하여 서로 다른 지점에서 스 캔한 자료를 정합하기에는 어려움이 많다. 따라서 본 연구에 서는 지상 LiDAR의 스캔영역이 서로 충분히 중첩될 수 있 도록 스캔지점을 선정하고, 모든 스캔지점에서 지상 LiDAR 의 내부 원점의 좌표를 VRS(Virtual Reference Station)을 이용하여 취득하고 후처리를 통하여 정합하는 방법을 사용하 였다. 각 스캔 자료는 취득된 원점에 의하여 지리좌표계상의 실제 위치에 고정되며, 각 자료의 3차원 모델을 서로 중첩하 되 각 스캔자료의 고정된 원점을 기준으로만 회전시켜 서로 정합되도록 하여 자료 전체의 방위, 피치, 롤이 자동으로 정 렬되도록 하였다.
지상 LiDAR의 원점좌표를 취득하기 위하여 국토지리정보 원에서 제공하는 Network-RTK라 불리는 가상기준점(VRS) 측 량서비스를 이용하여 LiDAR 측량 지점마다 매번 함께 측량을 실 시하였다. VRS-RTK의 원리는 기준국(GPS 상시관측소) 3점 이 상을 이용하여, 이동국(관측점) 주변에 가상의 기준점을 설정 하고 실시간으로 관측오차 보정요소(전리층, 대류권 및 위성 궤도 오차 등) 데이터를 이동국에 전송함으로써 측위정도를 향상 시키는 방식이다. VRS-RTK를 위하여 사용한 GPS 수신기는 CHCnav Huace X90 이며, RTK 수평위치 정확도는 ±10 mm+
1 ppm, 수직위치 정확도는 ±20 mm+1 ppm이다. 수직좌표의 경우 연구지역 주변 수준점 4지점의 해발고도(인천 평균해면 기준)을 이용하여 보정(Site Calibration)하였다. Table 1은 수
준값 보정을 위하여 사용한 국토지리정보원의 서산 수준점 2 곳과 국립해양조사원의 안흥, 천리포 수준점에 정보를 보여 주고 있다. 한국해양연구원에서 매설한 동판의 측량성과 또 한 수차례 활용하였으나, 이는 2009년 6월 도로확장공사로 유 실되었다. LiDAR 자료의 정확도 검증을 위해 LiDAR 측량 시 RTK-DGPS 측량을 통하여 해변 정보를 취득하여 LiDAR 자료와 비교한 결과 평균 제곱근 오차가 약 4~7 cm로 나타 났다(Table 4).
2.2 다중빔 음향측심기를 이용한 정밀 수심측량 해저 정밀지형측량은 다중빔 음향측심기(MBES: Multi-beam Echo Sounder)를 이용하여 일정한 방사각(Swath Angle)을 갖 는 수십 개 이상의 빔을 수중에서 수신하여 한 번에 수심의 2~7 배 정도 범위의 자료를 취득하는 수심측량 방법이다. 상대 적으로 매우 조밀한 해저면의 수심값을 취득하여 종래의 수 심측량보다 해저면의 지세와 수중 구조물의 형태를 자세히 파 악할 수 있다.
다중빔 음향측심은 고성능 음향측심기와 이를 지원하는 여러 센서류를 사용하는 시스템이므로 해상특성을 고려한 조사계획 의 수립과 각 장비에 대한 사전 테스트가 이루어져야 한다. 이 에 따라 현장 및 조사항목의 기초자료를 수집, 분석하고 조사 구역에 대한 측선배치 및 선속계획을 수립하였으며, DGPS 및 각종 센서에 대한 장비 테스트는 시험탐사시 실시하였다. 현 장 조사시 양질의 측심 데이터 취득을 위한 파라미터 조정을 실시간으로 수행하고, 수심보정을 위한 음속 측정과 조위관측 등은 병행하였다(Fig. 4). 현장조사를 통하여 저장된 다중빔 수 심자료는 각종 보정을 포함한 자료처리과정을 거친 후 최종 수심도를 작성하였다.
만리포의 수심측량을 위해 국제수로기구(IHO) 특등급 수준 에 부합하는 Reson사의 Seabat 9001 다중빔 음향측심기을 이 용하여 탐사를 수행하였으며, 수심측량 결과 역시 이에 상응 하는 수준을 만족하였다. Seabat 9001은 발진 주파수 455 kHz 에 수직 빔 폭 1.5
o부채꼴형 음파 빔을 송출한다. 60개의 빔 을 동시에 수신하며, 이때 수직 빔 폭은 15°, 수평 빔 폭은 1.5
o. 따라서 전체 측심 폭은 90
o수심의 약 2배에 이른다. 60 개의 빔이 5 cm의 측심 분해능으로 측심값을 획득하며, 조사 선박의 측선 항행과 위치 측정을 위해 Wide Area DGPS 시
Table 1. Tidal Bench Mark of NGII and KHOANo. Position Elevation
N E meter Etc.
Seosan 12-01-02-01 36°45'24.38'' 126°17'07.51'' 29.53 NGII, 2004.07 Seosan 12-01-02-02 36°45'24.0'' 129°16'21.60'' 12.98 NGII, 2004.07 Cheonlipo TBM2 (344) 36°48'21.63'' 126°08'53.23'' 8.62 KHOA, 2008.04
Anheung TBM3 36°40'22.96'' 126°07'56.03'' 5.5 KHOA, 2008.04
Malipo cipperplate 36°47'07.76'' 126°07'58.34'' 5.16 KORDI, 2008.09 주)NGII - National Geographic Information Institute(국토지리정보원)
KHOA - Korea Hydrographic & Oceanographic Administration(국립해양조사원) KORDI - Korea Ocean Research & Development Institute(한국해양연구원)
스템을 사용하였다. 사용된 GPS는 Navcom의 StarFire 시스템 이다. Wide Area 방식은 광역기준망에서 처리된 정밀 위치정 보를 위성망을 통하여 GPS에서 단독으로 수신함으로써 이동 국과 상대적으로 가까운 거리에 별도의 Reference 기지국 없 이도 정밀한 위치값을 얻을 수 있다. 조사시 사용한 StarFire 는 C-Nav NET-1, NET-2망을 사용하여 해상에서 오차 0.1 m 이내의 정밀 위치를 측정한다. 조사선박의 위치측정값은 선박 에 설치한 컴퓨터에서 구동하는 Hypack 이라 불리는 수로측 량 전문 프로그램과 연결되어 계획하고 GPS와 연동하여 조 사선의 항행을 유도하며, 다중빔 음향측심기와 모션센서, 자 이로컴파스의 데이터를 취득한다. 측선간격은 측심 전 영역을 포함하도록 수심과 소나 지향각(roll angle)에 따라 조정하였 다. 10 m 이상의 수심지역에 대해서는 다중빔 소나 지향각을 0
o장착하여 자료의 신뢰도를 높였으며 측선간격은 10~30 m 로 측량하였으며, 10 m 이내의 선박 접근이 어려운 낮은 수 심지역에 대한 조사를 수행하기 위하여 소나 지향각을 40~45
o장착하고 10~40 m의 측선간격으로 측량하였다. 조사 총면적은 1,440,000 m
2, 총 측선장은 104.4 km였다.
해수면 파동에 의한 선박운동을 측정하기 위한 시스템으로 DMS-10 과 Vector Sensor를 사용하였다. DMS-10은 관성계측 으로 선박의 Roll, Pitch, Heave 운동을 측정하고, Vector Sensor 는 두 개의 GPS 안테나로 선박의 Heading을 측정하였으며 이 값들은 실시간으로 측심값에 보정된다. SV&P 센서는 수중의 음속을 연속 측정하여 수층의 음속 그래프를 생성하며, 이를 이용하여 음측계로 기록된 측심 데이터의 음파전달속도와 음 파굴절효과를 보정한다. 조사 선박의 움직임에 의한 오차는 Motion Sensor 와 Gyrocompass로 운동량(roll, pitch, heave, yaw) 이 보정된 측심값이 실시간으로 취합·보정된다. 음속측정 은 측량조사 시작 전과 후에 2회 이상 실시하여 수심보정의 정확도를 높였다. Patch Test는 다중빔 소나헤드의 정확한 방 향을 결정하기 위한 것으로 취득한 측심 값은 소나헤드 설치 시 틀어짐으로 인한 미세한 수심오차를 갖는데 이를 보정하 기 위함이다. 현장 조사시 Patch Test를 위한 Sweep 데이터를 취득 후 소나 헤드의 Roll, Pitch, Yaw 방향에 대하여 세 번의
테스트를 수행하였다. 테스트 방법은 한 쌍의 Sweep 데이터 에 대하여 소나 헤드의 방향각을 산술적을 변화시키며 최소 의 수심오차에 대응하는 방향각을 구한다. 그 결과값은 취득 한 전체 측심 데이터에 적용하여 측심값을 보정한다. 2009년 3월과 6월에 대한 Patch Test결과는 Table 2와 같다.
이렇게 취득한 수심자료는 조사시점의 조위자료를 통한 조 위보정이 필요한데, 본 연구에서는 만리포에 직접 AAT수압식 파고조위계를 설치하여 조위관측을 수행하였으며, 수심자료의 조위보정자료로 사용하였다. 파고조위계는 매 0.5초 마다 수 압을 관측하여 매 1분 평균된 수압자료를 기록하며, 대기압 보 정을 위해 인근 기상청 태안관측소 대기압 관측자료를 이용 하였다. 또한 조위계 자료높이를 인천 평균해면을 수직기준점 으로 환산하기 위하여 표척을 이용한 목측관측도 함께 수행 하였다. 표척은 만리포 남방파제에 고정시키고 10분마다 3회 정도 평균한 해수면 높이를 기록하였고, 기록된 표척관측 자 료에 대응하는 조위관측자료의 차이를 평균하여 조위자료에서 평균값을 제하여 관측된 조위자료를 인천 평균해면 기준의 조 위관측 결과로 환산하였다. 그리고 7개월간 관측된 1분 조위 자료를 61개 이동·평균한 1시간 자료를 이용하여 조화분석을
Fig. 4. Malipo Depth Surveying ship with MBES and other sensors.Table 2. Result of Patch Test
Date Roll Angle Roll Pitch Yaw
1
2009. 03. 11 2009. 03. 11
0° -3.15 -1.00 -0.40 -40° -43.64 -1.10 -1.60 2009. 03. 12 0° -2.77 -1.08 0.50 2 2009. 06. 22 -45° -47.20 -0.90 -4.30 2009. 06. 23 0° -3.50 1.20 2.10
Table 3. Table of tidal harmonic constant
Name Amplitude (cm) Phase (°)
A0 14.45
M2 210.57 108.66
S2 86.20 161.45
K1 35.36 294.46
O1 26.79 257.04
수행함으로써 만리포의 평균해면 14.45 cm를 산정하였으며, 관 측기간에 대한 각분조의 조화상수는 Table 3과 같다. 또한 국 립해양조사원의 인근 천리포 기본수준점성과표의 조화상수를 살펴보면 5° 이내의 위상차 및 4 cm 정도 위상차로 유사한 결 과를 보였다.
3. 육도-해도 접합을 통한 정밀 지형도 작성 및 GIS기반 3차원 공간분석
육도-해도 접합을 위해서는 지상과 바다가 동일한 수직기준 면에 의하여 산정된 지형과 수심을 나타내야 하므로 수직좌
Table 4. RMSE of LiDAR and RTK-DGPS DataPoint no. RTK-DGPS LiDAR
Deviation (m)
X Y Z Z
1 123720.86 366219.26 0.33 0.33 0.00
2 123451.11 365678.24 1.24 1.22 0.02
3 123287.64 365678.90 -1.28 -1.36 0.07
4 123302.30 365533.37 0.94 0.99 0.04
5 123317.00 365652.01 -0.61 -0.64 0.03
6 123349.16 365625.35 0.31 0.25 0.06
7 123259.62 365625.77 -0.93 -0.86 0.08
8 123285.83 365600.46 -0.61 -0.52 0.09
9 123416.88 365714.67 0.27 0.24 0.03
(2008년 06월) RMSE 0.055
1 123476.4 365620.28 2.767 2.688 0.079
2 123408.3 365618.39 1.069 0.981 0.088
3 123348.2 365625.5 0.184 0.09 0.094
4 123232.3 365717.8 -2.823 -2.764 -0.059
5 123278.6 365776.7 -2.88 -2.931 0.051
6 123304.4 365774.8 -2.465 -2.55 0.085
7 123193.3 365680.301 -2.948 -2.883 -0.065
8 123296.9 365797.1 -2.828 -2.922 0.094
9 123320.2 365827.0 -2.808 -2.881 0.073
10 122703.8 365536.9 -1.921 -1.921 0
(2009년 11월) RMSE 0.077
1 123684.8 366109.8 0.331 0.355 -0.024
2 123651.3 366066.3 0.159 0.183 -0.024
3 123744.8 366240.2 0.443 0.463 -0.02
4 123737.1 366332.8 -0.085 -0.016 -0.069
5 123728.5 366305.9 -0.136 -0.093 -0.043
6 123608 366017.1 -0.002 0.047 -0.049
7 123630 365955.9 0.805 0.874 -0.069
8 123561.7 365901.7 0.383 0.43 -0.047
9 123533.8 365864 0.35 0.354 -0.004
10 123485.1 365806.7 0.212 0.209 0.003
11 123456 365765.7 0.198 0.19 0.008
12 123449.2 365706.7 0.653 0.634 0.019
13 123336.7 365608.6 0.208 0.261 -0.053
14 123332.8 365556.2 0.792 0.89 -0.098
15 123168.9 365468.3 0.263 0.24 0.023
16 123151.1 365452.2 0.395 0.402 -0.007
17 123124.1 365430.1 0.373 0.435 -0.062
18 123088.6 365407 0.497 0.48 0.017
19 123015.9 365357.4 0.824 0.832 -0.008
20 122870.2 365349.6 0.678 0.751 -0.073
21 122823.4 365352.3 0.741 0.817 -0.076
22 122795.7 365324.9 1.308 1.378 -0.07
(2010년 1월) RMSE 0.040
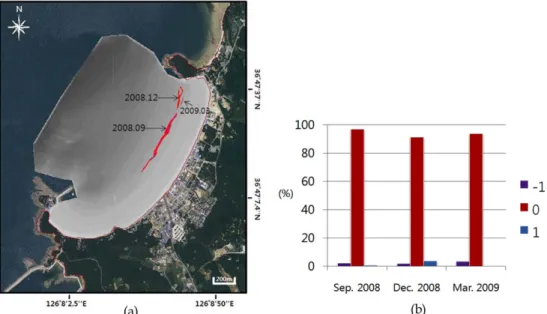
표계의 기준점 통일이 필요하다. 본 연구에서는 지형 및 수심 자료의 지리좌표계 변환시 수직좌표의 기준을 인천 평균해면 을 기준으로 환산함으로써 두 자료의 접합을 수행하였다. 또 한 정확한 접합을 위하여 조간대 영역에서 충분히 중첩되는 지형정보 및 수심자료 획득을 위하여 측량 시점을 사리 간조 및 만조시에 맞추어 함께 수행하였다. 2008년 9월, 2008년 12 월, 2009년 3월 자료의 LiDAR 및 MBES 중첩영역(Fig. 5a) 에 대하여 상호 비교한 결과 평균 오차는 약 2~6 cm로 나타 났으며(Table 5), 중첩영역의 95% 이상이 오차범위 약 -2에서 +2 cm 사이에 분포하고 있었다(Fig. 5b).
폭풍해일 및 침수범람 예측의 경우 국지적으로 발생하는 침 수지역을 예측해야하므로 그 지역의 평균해면을 기준으로 침 수범람지역을 예측하여야 한다. 따라서 인천 평균해면을 기준 으로 한 표고 및 수심을 만리포 평균해면을 기준으로 환산하 기 위하여 인천 평균해면과 만리포 평균해면의 상관관계를 밝 혀내야 한다. 이를 위해 만리포에 파고조위계 설치를 통한 조 위관측을 통하여 산출한 만리포 평균해면과 인천항 평균해면 의 차이를 통해 만리포 평균해면고로 변경하여 예측모델의 입 력 자료로 사용하고 있다. 현재 약 7개월 동안의 조석관측을 통해 산출한 만리포 평균해면은 인천 평균해면과 14.45 cm 정 도의 높이차를 보였으나, 평균해면은 관측기간 또는 관측 계 절에 따라 그 높이가 달라지므로 장기간 조석관측을 통하여 보다 정확한 만리포 평균해면을 산정할 예정이다.
육도-해도 접합을 통한 정밀 지형도는 Fig. 6과 같으며 수 심정보의 경우 1 m
2당 5점의 해상도를 갖고, 지형정보의 경 우는 레이저 스캐너의 방사형 자료획득 특성으로 5 cm~1 m의
방사형 가변 해상도를 갖는다. 각각의 LiDAR 자료 및 다중 빔 측심자료 처리는 전용 자료처리 소프트웨어인 RiScan Pro 와 Hypack 프로그램을 사용하였으며, 처리된 자료의 접합 및 검증, 3차원 공간분석 등은 ArcGIS를 사용하였다. GIS 기반 자료처리를 통하여 작성된 최종 정밀 지형도는 50 cm 해상도 를 갖는 수치표고자료(DEM: Digital Elevation Model)로 작 성하였다.
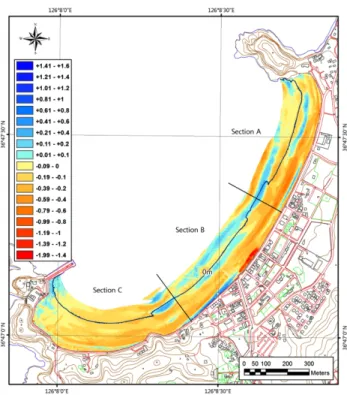
또한 장기간 주기적으로 측량한 지상 LiDAR 자료에 대해 서 GIS 기반 3차원 공간분석을 통하여 지형기복을 수치화할 수 있고, 수치화된 지형을 바탕으로 고도, 경사도, 사면방향, 요철율, 유역분석 등 지형변화에 대한 정량적 분석이 가능하 다. Fig. 7은 2009년 3월과 2009년 6월 LiDAR 자료의 표고
Fig. 5. (a) Overlap Area of LiDAR and MBES on Malipo DEM and (b) Probability graph of difference.Table 5. Mean error of LiDAR and MBES on the overlap area Date Sep. 2008 Dec. 2008 Mar. 2009
Mean Error (m) 0.02 0.05 0.06
Fig. 6. Malipo’s High-resolution Topographical Map.
변화를 보여 주고있으며, 적색은 2009년 3월을 기준으로 침식, 청 색은 퇴적을 나타내고 있다(심 등, 2010). 하지만 이는 조사시 점의 해양환경요소 및 양빈과 같은 인위적 해변 변화량이 함 께 계산되어야만 정확한 침식 또는 퇴적에 관한 분석이 가능 하다. 이를 위해 현재 해양관측장비 설치를 통한 해양환경 관 측을 통하여 연안 모니터링에 효율적으로 활용하고자 한다.
4. 결 론
본 논문에서는 연안지역의 육도-해도 접합을 통한 고해상도 정밀 지형도 작성을 위하여 대조차 해안인 만리포를 시범 조 사지역으로 선정하고, 지상 LiDAR를 이용한 정밀 지형측량 과 다중빔 음향측심기를 이용한 정밀 수심조사를 실시하였다. 특 히 육도-해도 접합시 조간대 영역의 충분히 중첩되는 지형정 보 및 수심자료를 획득하기 위하여 사리 간조 및 만조시 동 시에 측량을 수행하였다. 지형정보와 수심자료가 중첩되는 조 간대 영역에 대하여 두 자료의 평균 오차는 약 2~6 cm로 나 타났다. 또한 접합된 자료의 검증을 위하여 RTK-DGPS 측량 결과와의 비교한 결과 평균 제곱근 오차가 약 5~7 cm로 나 타났다. 육도-해도 접합 정밀지형도는 GIS 기반 자료처리를 통하여 50 cm 해상도의 수치표고자료로 작성하였다. 지상 LiDAR 자료의 지리좌표계 변환을 위하여 스캐닝 지점마다 VRS-RTK 측량을 함께 수행하였으며, 이는 또한 스캐닝 자 료의 정합시에도 스캐닝 원점 즉, VRS-RTK를 통한 지리좌 표를 기준으로 회전을 통해 자동 정렬함으로써 지형기복이 나 특징점이 없는 해변 지형에 대한 LiDAR 자료의 정합에
도 효과적으로 이용되었다. 수심자료의 보정을 위해서는 파 고조위계 설치관측을 통한 조위관측 및 인천 평균해면을 수 직기준면으로 조위 환산을 위하여 표척을 통한 목측관측을 함께 수행하였다. 또한 폭풍해일 및 침수범람의 정확한 국 지적 영향 예측을 위하여 7개월간 조위관측 자료의 분석을 통하여 만리포 평균해면과 인천 평균해면의 상관관계를 산 정하였으며, 정확한 만리포 평균해면 산정을 위해 1년 이상 의 조위관측을 연속적으로 수행하고 있다. 육도-해도 접합을 통해 작성한 정밀 지형도는 폭풍해일 및 침수범람 예측모델 의 정확성 향상을 위한 정밀 입력자료로 사용되고 있으며, 입력자료 정밀도 향상에 따른 예측결과의 향상을 보여주고 있다. 나아가 정밀 지형도의 GIS기반 3차원 공간분석을 통 하여 경사도 및 체적변화 등의 산정을 통한 형태학적 변화 량을 살펴봄으로서 추후 해양환경 관측결과와의 연계한 분 석을 통하여 연안 관리 및 모니터링에도 효과적으로 활용될 수 있을 것이라 기대한다.
감사의 글
본 논문은 한국해양연구원 기본사업인 해일 침수범람지역 예 측기술 및 재해도(Hazard Map) 작성기술 개발(PE98323), 수 치모델과 관측자료의 웹 GIS 실시간 시뮬레이션 기술개발 (PE98414) 과 국토해양부 소관 연구개발사업(운용해양시스템 연 구, PM55210)의 지원으로 수행되었음.
참고문헌
강영미, 강준묵 (2006). LiDAR 자료를 이용한 유역의 퇴적물 모니터링. 한국측량학회지, 24(1), 27-36.
국토지리정보원 (2009a). 다차원 공간정보구축 표준매뉴얼.
국토지리정보원 (2007). 영상지도 제작현황.
국토지리정보원 (2009b). 항공레이저측량 작업규정.
국토해양부 (2006). 연안침식 모니터링 체계구축(IV).
소방방재청 (2008). 자연재해피해저감기술 개발 및 지진해일 재 해저감기술 개발.
심재설, 김진아, 박한산, 김선정 (2010). 지상 LiDAR를 이용한 만리포 해변 정밀 지형측량 및 지형변화 분석. Ocean and Polar Research, Vol. 32(1).
정 현, 최윤수, 윤하수, 이유정 (2008). SHOALS를 이용한 해 안선 측량 및 수심측량. 지리정보학회, 2008 공동추계학술대 회, 331-332.
조우석 (2008). 지적·지형측량 통합에 따른 지적측량 기술개발 방향. KINX2008107955.
최윤수, 황세열, 서병덕, 위광재 (2004). LiDAR & SHOALS 기술을 이용한 해안선 측량 및 모니터링에 관한 연구. 한국의 해안선 정립을 위한 워크샵, 137-144.
Ahmed, F. and Elaksher. (2008). Fusion of Hyperspectral image and LiDAR-based DEM for coastal mapping. J. Optics and Lasers in Eng., 46(7), 493-498.
Fig. 7. Distribution of elevation changes of LiDAR between Mar.
2009 and Jun. 2009.
Brzank, A. and Heipke, C. (2006). Classification of LiDAR data into water and land points in coastal area. Proc. Int’l Society for Photogrammerty and Remote Sens., 1, 197-202.
Harley. M., Turner. I., Short. A. and Ranasinghe. R. (2006). Mon- itoring beach processes using conventional, RTK-GPS and Image-derived survey methods: Narrabeen beach. Proc. Coastal GIS Conference.
Lisa. S. P., Michael. A. O. and Jack. A. P. (2008). Developing Ter- restrial-LiDAR-based Digital Elevation Models for Monitoring Beach Nourishment Performance, Journal of Coastal Research, Vol. 24, No. 6, pp. 1555-1564.
Paul. A. G., Wang. Y. and White. S. A. (2006). Using LiDAR to Monitor a Beach Nourishment Project at Wrightsville Beach, North Carolina, USA. J. Coastal Res. 22(5), 1206-1219.
Shui-sen. C., Liang-fu. Chen., Qin-huo. L., Li. X. and TAN. Q.
(2005). Remote sensing and GIS-based integrated analysis of
coastal changes and their environmental impacts in Lingding Bay, Pearl River Estuary, South China. J. Ocean & Coastal Management, 48(1), 65-83.
Simon J. Buckley, J. A. Howell, H. D. Enge, T. H. Kurz, (2008).
Terrestrial laser scanning in geology: data acquisition, process- ing and accuracy considerations. J. Coastal Res., 24(6), 625- 638.
Stockdon. H. F., Shallenger. J. A. H, List. J. H. and Holman. R. A.
(2002). Estimation of shoreline position and change using air- borne topographic LiDAR data. J. Coastal Res., 18(3), 502-513.
원고접수일: 2009년 9월 14일
수정본채택: 2009년 10월 20일(1차), 2009년 11월 30일(2차) 2010년 2월 12일(3차)
게재확정일: 2010년 2월 19일