CopyrightⓒKROS
1. 서 론`
안정성 향상을 위한 자율 주행 로봇의 실시간 접촉 지면 형상인식
Real-time Recognition of the Terrain Configuration to Increase Driving Stability for Unmanned Robots
전 봉 수1, 김 자 영2, 이 지 홍†
Bongsoo Jeon1, Jayoung Kim2, Jihong Lee†
Abstract Methods for measuring or estimating of ground shape by a laser range finder and a vision sensor(exteroceptive sensors) have critical weakness in terms that these methods need prior database built to distinguish acquired data as unique surface condition for driving. Also, ground information by exteroceptive sensors does not reflect the deflection of ground surface caused by the movement of UGVs.
Thereby, UGVs have some difficulties regarding to finding optimal driving conditions for maximum maneuverability. Therefore, this paper proposes a method of recognizing exact and precise ground shape using Inertial Measurement Unit(IMU) as a proprioceptive sensor. In this paper, firstly this method recognizes attitude of a robot in real-time using IMU and compensates attitude data of a robot with angle errors through analysis of vehicle dynamics. This method is verified by outdoor driving experiments of a real mobile robot.
Keywords: Laser Range Finder, Inertial Measurement Unit, Real time recognition of the ground shape
1. 서 론
주행 로봇이 자율 주행을 하기 위해서는 주행 가능한 구역에 대한 판단과 경로 계획이 필수적이다. 따라서 주 행 가능한 구역에 대한 판단을 위하여 영상 센서의 색 정 보를 활용하고[1] 레이저 거리 센서를 이용한 선행지형을 예측하여 복원[2]하는 연구가 활발히 진행되었다. 그리고 영상 센서(Vision Sensor)와 레이저 거리 센서(LRF)뿐만 아 니라 GPS와 관성 측정 장치(Inertial Measurement Unit)를 융 합하여 주행하는 로봇의 위치를 추정하고 이를 바탕으로 3차원 월드 모델을 생성하는 연구도 있다[3-4].
3차원 월드모델은 로봇이 안전하게 주행할 수 있도록 경로를 계획하기 위한 지도로 사용된다. 로봇의 시작위치 와 목표위치가 주어진다면 Dynamic A* 알고리즘을 사용 하여 목적지까지의 경로를 계획할 수 있다[5]. 하지만 영상 센서와 레이저 거리 센서의 사용은 로봇으로부터 수 미터 (m) 떨어진 주위환경에 대한 인식을 목적으로 한다. 즉, 선행 지형의 굴곡 정도와 주변 장애물 등을 구분하고 주 행할 수 있는 구역과 주행할 수 없는 구역을 판단한다. 하 지만 영상센서와 레이저 거리센서 데이터 만으로는 지면 의 변형 정도와 미끄러짐의 정도들을 알 수는 없다는 문 제가 있다. 침하와 미끄러짐의 정도(slip ratio)와 같은 지질 의 특성은 자율 주행 로봇의 주행 효율성과 안정성을 판 단하는 중요한 변수로 적용되어, 이미 다양한 방법을 이 용하여 지질의 특성을 분류하는 방법과, 각 지질에 따른 효율적인 주행 방법이 제시되었다[6-11]. 따라서 영상 센서 와 레이저 거리센서로부터 얻어지는 데이터는 로봇이 직
Received : Aug. 16. 2013; Reviewed : Sep. 16. 2013; Accepted : Oct. 11. 2013
※ This research was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science and Technology(NRF-2012R1A1A4A01017682)
1 Mechatronics Engineering, Chungnam National University ([email protected])
2 Mechatronics Engineering, Chungnam National University ([email protected])
† Corresponding author: Mechatronics Engineering, Chungnam National University Gung-Dong, Youseong-Gu, Daejeon, Korea ([email protected])
접 경험하지 않은 환경에 대한 예측성의 데이터라고 정의 할 수 있다. 자율 주행 로봇은 미리 학습된 정보에 의존하 여 이러한 예측성의 데이터를 구분하여 인식한다. 그러므 로 주행 안정성을 높이기 위해서는 예측성의 데이터를 구 분 할 수 있는 더 많은 양의 학습된 정보를 요구하게 된 다. 하지만 야지 환경에서는 예측 불가능한 환경 정보가 많아, 로봇이 모든 것이 학습된 정보를 구축하기 어렵다 는 문제가 있다. 뿐만 아니라 영상 센서의 경우 기후 변화 에 따라 인식되는 색상 정보의 변화로 인하여 학습된 정 보와 매치(match)하는 데에 어려움이 따른다. 따라서 모든 상황 변수를 고려하여 학습된 데이터를 구축한다 하더라 도 데이터를 구분할 수 있는 더 고도화된 데이터 인식 알 고리즘을 필요로 하게 된다.
반면에 경험에 의한 데이터는 실제 주행을 통해 로봇 몸체 범위 내에서 얻어지는 데이터라고 정의할 수 있다.
예측성의 데이터에 비해 얻어지는 환경 정보 범위가 좁지 만 경험을 통해 얻은 데이터라는 점에서 비교적 신뢰도가 높다. 따라서 예측성의 데이터로 만들어진 3차원 월드 모 델에서 경험에 의한 데이터를 실시간으로 업데이트하고 보상하여 계획된 경로 내에서 더 높은 주행 안정성을 보 장할 수 있다. 이러한 근거로 선행 연구에서는 영상센서 로부터 미리 학습된 데이터를 기반으로 선행 지역에 대한 지질특성을 판단하고 각 바퀴에 부착된 진동센서를 통해 자율 주행 로봇이 주행하는 실제 지질 특성을 분류하여 실시간 업데이트를 하였다. 이 연구를 기반으로 선행지역 에 대한 지질 지도를 작성할 수 있다[7-10]. 이와 같이 접촉 식 센서를 활용한 연구는 대부분 지질의 특성을 판단하는 데 목적을 두고 진행되어 왔으며 지면의 형상을 인식하는 연구는 레이저 거리센서나 영상센서에 의존하고 추가적으 로 센서를 퓨전 하여 지면 형상의 인식 정확성을 높이는 데 초점을 맞춰가고 있다[2-11].
본 논문에서는 관성 측정 장치(IMU)를 사용하여 로봇 이 실제 지형을 주행 하면서 경험하는 데이터를 기반으로 접촉한 지면의 형상을 인식하는 방법을 제시한다. 자율 주행 로봇이 지면과 실제로 접하고 있는 각도를 추정하는 것은, 매 순간, 주행 로봇이 지면과 접한 기울기에 따른 주행 안정성을 판단할 수 있게 한다. 이를 통해 로봇이 예
측성의 데이터를 기반으로 생성된 월드 모델에서 계획된 경로에 따라 주행하면서 접촉 지면의 형상 정보를 보상하 여 자율 로봇의 주행 안정성을 보다 높일 수 있도록 한다.
2. 지면 형상 인식 알고리즘
접촉 식 방법으로 지면의 형상을 인식하는 알고리즘에 서는 로봇의 주행을 통해 얻어진 데이터에 포함된 노이즈 를 제거하는 것이 필수적이다. 따라서 차량 동역학 해석 을 적용함으로써 관성 측정 장치로부터 인식된 각도 값을 보상하게 된다.
2.1 로봇 동역학을 적용한 Pitch 각도 보상
앞서 설명하였듯이, 보다 정확한 지면의 형상을 인식하 기 위해서는 동역학적 해석을 적용하여 각도 보상을 해야 한다. 본 논문에서 설명하는 동역학 식은 실험에 사용된 로봇을 기준으로 세워진 것으로써, 각도 보상을 위해서는 각 로봇에 맞는 동역학적 해석이 적용되어야 한다. 본 논 문의 실험에 사용된 로봇은 조향 장치가 없는 스키드 (skid) 타입의 4륜 주행 로봇으로 관성 측정 장치에 2가지 의 노이즈를 포함시킨다. 첫째로 현가 장치가 설계 되어 있지 않아서 로봇이 주행하면서 생기는 진동이 관성 측정 장치에 직접적으로 전달되어 노이즈로 작용할 수 있다.
또한 추가적으로 고려해야 할 사항은 타이어에 적용되는 스프링 댐퍼 작용이다. 로봇은 주행 가속도와 지면과 이 루고 있는 각도에 따라서 앞바퀴와 뒷바퀴에 작용하는 하 중에 차이가 생긴다. 로봇이 등속도로 평평한 지면을 주 행하는 경우 가속도가 0 (a = 0) 이므로 앞바퀴와 뒷바퀴에 걸리는 하중은 거의 같게 되고 하중차이로 인한 각도 오 차가 거의 생기지 않는다. 하지만 로봇이 가속운동을 하 는 경우나 오르막 지형이나 내리막 지형을 주행하는 경우 에는 앞바퀴와 뒷바퀴에 걸리는 하중에 차이가 생기게 되 고 이 차이로 인하여 로봇의 몸체가 기울어지는 결과를 보인다. 하지만, 로봇의 몸체에 부착된 관성 측정 장치는 각 바퀴에 걸리는 하중의 차이로 인한 로봇의 기울기를 구별할 수 없다. 따라서 관성 측정 장치로부터 측정되는 각도 데이터에 간단한 동역학적 해석을 적용하여 하중에 의한 각도 오차를 분류하고 제거해야 한다.
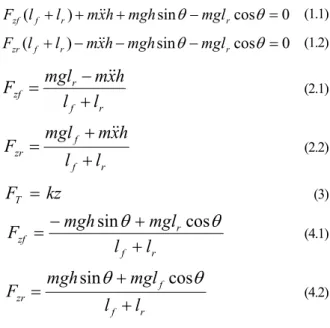
Fig. 1 은 실험용 로봇의 각 부분에 작용하는 힘을 나타 낸 그림이다. 공기에 의한 저항은 크게 영향을 받지 않는 다고 가정하고 제외하였다. 각 바퀴를 기준으로 발생하는 모멘트를 구하면 식 (1.1), 식 (1.2)와 같이 나타낼 수 있다.
먼저 가속도에 의한 각도 오차를 보상하기 위해 θ 를 0°
라고 (θ = 0°) 가정하고 식 (1.1), 식(1.2)를 각 바퀴에 걸리 는 하중에 대한 식으로 정리하면 식 (2.1)과 식 (2.2)로 표 현할 수 있다. 매 샘플링 타임 마다 계산 되는 각 바퀴의 하중 값 Fzf, Fzr은 각각 식(3)의 FT (타이어에 가해지는 힘) 에 대입하여 타이어가 눌린 변위 값(z)으로 계산 할 수 있 다. 앞 바퀴와 뒷 바퀴의 변위 값의 차이에 의한 각도를 로봇의 주행 가속도에 의한 관성 각도 오차로 정의하고 관성 측정 장치를 통해 측정된 실제 데이터에서 빼는 과 정을 통하여 1차 각도 보상을 해준다. 하지만 여기서 주의 해야 할 것은 타이어의 강성 계수 k를 구하는 것이다. 타 이어의 강성 계수는 선형탄성 영역에 대한 변형과 비선형 영역의 변형을 동시에 고려해 주어야 하지만, 본 논문에 사용된 실험 로봇에서는 타이어에 가해진 압력에 따라 선 형적으로 증가한다고 가정하여 타이어의 강성 계수를 샘 플링 타임마다 구해지는 하중 값에 따라 변경시켜 주었다.
둘째로 주행 로봇의 각 바퀴에 걸리는 하중은 식(1.1)과 식 (1.2)에서 정리한 것과 같이 가속도뿐만 아니라 지형의 각도에 따른 영향도 받는다. 따라서 지면의 형상 각도에 따른 추가적인 각도 보상이 이루어져야 한다. 그러므로 식(1.1)과 식(1.2)의 가속도가 포함된 항을 제거하여 지형
각도에 따른 하중으로 식(4.1)과 식(4.2)와 같이 정리하고, 구한 하중 값을 식(3)의 FT에 대입하여 타이어에 눌린 변 위 값으로 계산한다. 이 과정을 통해 얻어진 타이어 변위 값의 차이에 의한 각도 오차를 지형 각도에 따른 오차로 정의하고 가속도에 의한 오차를 보상한 각도 값에서 다시 빼줌으로써 2차 각도 보상을 해준다.
0 cos sin
)
( f + r + + θ− r θ =
zf l l mxh mgh mgl
F && (1.1)
0 cos sin
)
( f + r − − θ− r θ =
zr l l mxh mgh mgl
F && (1.2)
r f
r
zf l l
h x m F mgl
+
= − && (2.1)
r f
f
zr
l l
h x m F mgl
+
= + &&
(2.2)
kz
F
T=
(3)r f zf r
l l
mgl F mgh
+ +
= − sin
θ
cosθ
(4.1)
r f
f
zr
l l
mgl F mgh
+
= sin θ + cos θ
(4.2)
2.2 지면 형상 인식 방법
경험에 의한 데이터를 사용하여 지면의 형상을 인식하 기 위해서는 로봇이 현재 지면과 접촉하여 이루고 있는 각도 정보와 로봇의 절대 속도 정보가 요구된다. 각도 정 보는 지면의 높낮이, 굴곡의 정도를 추정하는데 사용되며 절대 속도 정보는 로봇의 이동 방향과 거리를 추정하기 위해 사용된다. 먼저 로봇에 부착된 관성 측정 장치로부 터 출력되는 각도 데이터는 로봇 동체를 기준으로 출력되 는 데이터이다. 따라서 실시간으로 출력되는 각도 정보를 전역 좌표에 나타내기 위해서는 회전행렬을 이용하여 좌 표변환을 해야 한다. 관성 측정 장치로부터 실시간으로 출력되는 각도 데이터에 오일러(Euler) 각도 표현 방법 중 Yaw, Pitch, Roll의 회전행렬(Rotation Matrix)을 곱해주어 전 역 좌표로 변환 할 수 있다. 추가로 로봇의 이동 거리 정 보를 더해줌으로써 전역 좌표에 로봇의 자세와 이동 정보 를 나타낼 수 있고, 이는 식 (5)로 표현할 수 있다. Rr'
은 전역 좌표에 나타내어지는 로봇 몸체의 중심 좌표이고 Fig. 1. The force acting on each wheel
Rr
은 로봇 몸체 기준 중심좌표, dr
는 3축 방향으로의 이 동거리를 나타낸다. Rr
에 곱해지는 3x3 행렬은 회전 행렬 (Rotation Matrix)을 나타내며 φ, θ, ψ는 각각 Yaw, Pitch, Roll 각을 나타낸다. 본 논문에서는, 로봇 몸체를 변형이 없는 강체로 가정하여 로봇 몸체의 중심 좌표가 항상 일 정한 상수로 고정하였고, dx는 절대 속도계로부터 얻어지 는 위치 값으로 하였다. 또한, x축 방향으로의 직선 주행에 대한 실험만 진행하였으므로 로봇이 y축 방향의 운동은 하지 않는다고 가정하여 0으로 (dy = 0) 대입하였다. dz는 관성 측정 장치로부터 얻어지는 매 순간의 각도 값을 빗 변의 기울기로 하고, 절대속도계로부터 얻어지는 x축 방 향으로의 이동변위(dx–dx-1)를 빗변의 길이로 하여 얻어지 는 높이 값으로 대신하였다.
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡ +
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
−
− +
+
−
=
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
z y x
z y x
' z ' y ' x
d d d R R R C
C S
C S
S C C S S C C S S S C S
S S C S C C S S S C C C R R R
ψ θ ψ
θ θ
ψ φ ψ θ φ ψ φ ψ θ φ θ φ
ψ φ ψ θ φ ψ φ ψ θ φ θ φ
(5)
식 (5)에서 φ(Yaw), θ(Pitch), ψ(Roll) 에는 각각 동역 학 해석으로 보상된 각도 값이 입력된다. 본 논문에서는 θ(Pitch)에 대한 움직임만 실험을 하였으므로 ψ(Roll) 과 φ(Yaw)에 대한 동역학 보상을 적용하지 않았다.
3. 실험을 통한 알고리즘 검증 3.1 로봇 시스템 및 실험 환경
3.1.1 로봇 시스템
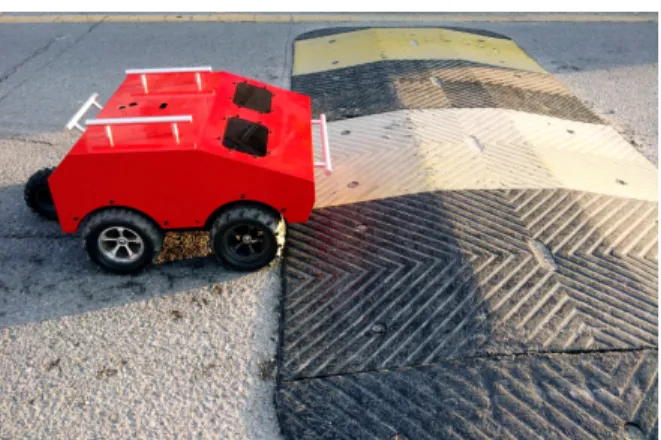
본 논문에서 사용된 실험용 로봇은 조향 장치가 없는, 스키드 타입(Skid type)의 4륜 구동 고속 주행 로봇이다. 로 봇의 전체 크기는 가로 49cm, 세로 65cm, 높이 32cm이며, 바퀴가 지면과 접한 접점을 기준으로는 가로 41.5cm, 세 로 24.5cm 의 크기이다. 로봇의 몸체 중심에 관성 측정 장 치를 부착하고 있으며, 센서와 시스템부를 포함한 로봇의 전체 무게는 16kg이다. 관성 측정 장치로부터는 Yaw, Pitch, Roll의 각도 정보만 얻어 지면의 굴곡 정도를 알아내는데 사용한다. 각각의 바퀴에는 DC모터를 연결하여 독립적인 제어가 가능하도록 하였으며, 최고 속도는 약 2m/s 이다.
특별히 로봇의 뒷부분에 절대속도 측정을 위한 바퀴를 추 가로 설계하였는데, 이 바퀴에는 동력이 없이 엔코더 (Encoder)만 연결하여 동력이 있는 4개의 바퀴에 각각 슬립 이 발생하여도 로봇 동체의 절대 속도를 추정할 수 있다.
로봇의 제어는 PID제어를 기반으로 단순한 속도제어를 하였다. 관성 측정 장치로부터 출력되는 각도 데이터의 출력주기는 80Hz이며, 로봇의 전체적인 시스템 샘플링 타 임은 0.05s로 맞췄다. 또한 각 센서의 안정화 시간을 고려 하여 시스템 동작 직후 강제 대기시간을 3초정도 주었으 며, 각 센서로부터 출력되는 데이터는 로봇이 움직이는 시점을 기준으로 저장을 시작하고, 로봇이 움직임을 멈추 면 더 이상 데이터를 저장하지 않도록 하였다.
강제 대기 3초의 시간 동안 로봇의 이동 방향과 자세의 정확한 측정을 위하여 관성 측정 장치의 초기화 작업이 선행 되어야 한다. 관성 측정 장치는 지자기 센서를 통해 Yaw값을 추정하므로 초기 정지상태에서의 데이터 샘플을 받아 얻은 평균 값을, 이후에 출력되는 Yaw 값에서 빼주 는 과정을 통해 초기상태에서는 로봇이 어떠한 방향을 바 라보고 있더라도 Yaw값이 0이 (Yaw = 0°) 되도록 하였다.
같은 방법으로 Roll, Pitch 값을 0으로 만드는 작업은 실험 환경에 따라 선택을 할 수 있으며, 본 논문의 실험환경에 서 로봇이 주행하는 초기 시작위치를 항상 단단한 지형의 평지를 기준으로 하였으므로 필터의 개념으로써 초기상태 에서 로봇이 어떠한 자세에 있다고 하더라도 Roll, Pitch 값 이 0이(Roll = Pitch = 0°) 되도록 만드는 작업을 선택하여 적용하였다.
Fig. 2. Robot Model
3.1.2 실험 환경
초기실험을 위해 Fig. 3과 같이 언덕의 길이 약 2m, 높 이 약 0.3m, 기울기 약 9.8° 의 레퍼런스 지형 구조물을 제작하였고, 실험을 통해 관성 측정 장치로부터 출력되는 데이터에 영향을 미치는 요소들을 확인하고 각도 보상 알 고리즘을 적용하여 지면 형상의 인식 알고리즘의 성능을 확인하였다. 이 후 Fig 4의 오르막 지형과 Fig 5의 과속방 지턱 지형 2개의 야외 실험장소를 선정하고 각각 0.5m/s, 1m/s, 1.5m/s의 속도로 주행한 후 각도 보상 알고리즘을 검 증하는 추가적인 실험을 진행 하였다. 모든 실험 환경에 서 로봇의 주행 시작 위치는 경사가 거의 없는 단단한 평 지로 하였다.
Fig. 4는 오르막 지형을 실험하기 위한 장소이다. 언덕의 기울기는 약 7.4°이며 언덕의 길이는 약 2m 80cm, 높이 는 약 26cm이다. 레퍼런스 지형 구조물과 달리 지면이 매 끄럽지 못하고 거친 특성이 있다.
Fig. 5. Experimental Places 2 – bump terrain
Fig. 5는 과속방지턱 지형이다. 오르막과 내리막의 기울 기는 약 8°정도이며 높이는 약 8cm이다.
3.2 실험 결과 분석
3.2.1 레퍼런스 지형 구조물
Fig. 6은 레퍼런스 지형 구조물에서 0.5m/s, 1m/s로 주행 하고 얻은 가속도 데이터를 출력한 그래프이다. A, B, C, D(0.5m/s 에서의 데이터), A’, B’, C’, D’(1m/s 에서의 데이터) 의 구간에서 가속도 값이 크게 나오는 것을 확인할 수 있 는데 먼저 A, A’구간은 로봇의 초기 가속에 의한 출력 값 이고, B, B’는 평지에서 언덕을 만나는 순간 발생하는 충격 에 의해 가속도 값이 낮아지는 것을 나타낸다. C, C’ 는 언 덕 주행을 마치고 평지로 올라가는 순간의 부하 감소로 인한 가속, D, D’ 는 로봇의 정지로 인한 데이터 출력임을 확인할 수 있었다. A, A’, B, B’, C, C’ 에서의 급 가속은 관
Fig. 3. Experiment in reference structures
Fig. 4. Experimental Places 1 – uphill terrain
Fig. 6. Changing of acceleration when driving in the reference st ructure
성력으로 작용하여 로봇의 앞 바퀴와 뒷바퀴의 변위 차이 를 만들어 낸다. 변위 차이로 인한 차체의 기울어짐은 로 봇의 몸체에 부착되어있는 관성 측정 장치에 직접적인 영 향을 주므로 로봇이 접촉하고 있는 지면의 각도를 정확하 게 출력할 수 없다. 그러므로 2.1.1절에서 설명한 바와 같 이 가속도에 의한 각도 오차를 계산하고 이를 보상해줘야 한다.
Fig. 7은 0.5m/s의 속도로 레퍼런스 지형 구조물을 주행 하여 얻은 각도 데이터에 1, 2 차 각도 보상을 적용하기 전과 적용한 이후의 높이 결과를 비교하여 나타낸 그래프 이다. 각도를 보상하기 전에 계산된 지형의 높이 값은 약 31.5cm로 실제 높이 값보다 약 1.5cm 정도의 오차를 보이 는 것을 확인하였으며 그 원인이 로봇의 주행 초기 가속 으로 인한 관성각도 오차에 있다고 가정하였다. 실제로 주행 초기에 로봇이 평지를 일정구간 주행하였으나, Fig. 7 의 1,2차 각도 보상전의 데이터에서는 초기에 평지를 주 행한 부분에 대한 구분이 어렵고 오히려 오르막을 올라가 고 있는 것처럼 나타난 것을 확인할 수 있다. 이러한 이유 는 앞서 가정한 바와 같이, 주행 초기에 발생한 가속으로 인하여 관성 측정 장치로부터 출력되는 각도가, 평지구간 에서도 순간적으로 0°가 아닌 4~5°정도의 값을 나타내고, 이것은 2.2절에서 제안한 방법대로 dz를 구할 때 오차를 나타내게 된다는 것을 확인하였다. 결과적으로, 2.1절에서 제안한 1,2차 각도 보상을 적용한 이후 출력된 높이 값은 약 30.07cm로 실제 지형과 거의 같은 높이 값을 출력하였
고, 초기 가속에 의한 관성 각도 오차도 많이 보상되어 초 기 평지 주행구간을 구분할 수 있었다.
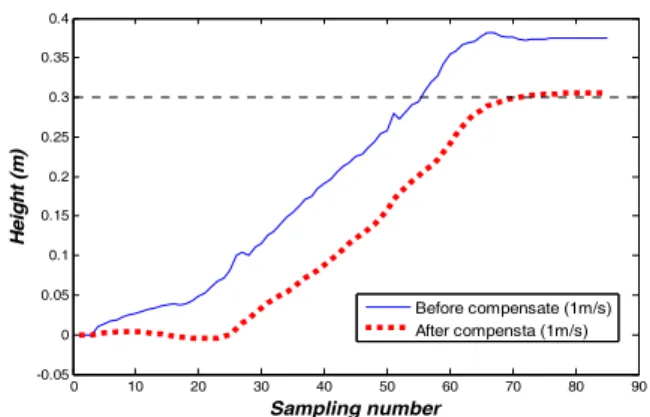
추가적으로, 1m/s로 주행하여 얻은 데이터를 이용하여 위 에서 설명한 바와 마찬가지로 각도 보상을 하기 전과 후의 데이터를 비교해 본 결과, Fig. 8에서와 같이 보상 전에는 실 제 지형보다 약 7cm 정도의 더 높은 값을 나타내었으나 알 고리즘을 적용한 이 후 레퍼런스 지형의 높이 값과 거의 비 슷한 높이로 보상되는 것을 확인 할 수 있었다.
3.2.2 오르막 지형
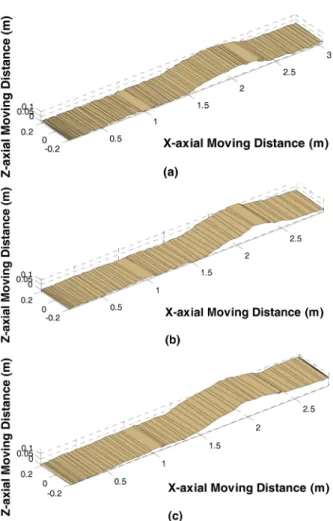
Fig. 9는 오르막 지형에서 로봇의 주행 속도를 각각 다 르게 하여 얻은 데이터를 MATLAB으로 출력한 것이다.
매 샘플링 타임마다 얻어지는 각도 데이터를 식 (5)에 대 입하여 구한 전역좌표 상의 로봇 중심 좌표를 기준으로 로봇이 지면과 접한 지점을 패치형태로 그려 이어 붙였다.
로봇은 항상 직선운동을 하였으며 Yaw방향으로의 회전은 없었다. z축 방향으로 이동한 거리를 비교해 볼 때 속도가 빠를수록 z축 방향 이동거리 즉, 지형의 높이가 더 높게 인식되는 것을 확인할 수 있었는데, 이것은 2.1.1절의 식 (2.1), 식(2.2)에서 표현된 것과 같이 빠른 속도의 주행 명 령을 내리면 가속도 값이 증가하고, 외란도 크게 작용하 여 그 결과 각 바퀴에 걸리는 하중의 차이를 더욱 크게 하여 생긴 오차라고 생각 하고 보상할 수 있었다.
Fig. 10은 Fig. 4의 오르막지형을 0.5m/s, 1m/s 의 속도로 주행하고 동역학 보상을 하기 전과 후의 높이 결과를 비 교한 그래프이다. 동역학 보상을 적용하기 전에는 높이 값이 실제 지형의 높이 보다 높게 계산된 것을 볼 수 있 Fig. 7. Comparison of the results before and after applying the a
ngular compensation
0 10 20 30 40 50 60 70 80 90
-0.05 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Sampling number
Height (m)
Before compensate (1m/s) After compensta (1m/s)
Fig. 8. Extra data comparison of the results applying the angular compensation
는데 이는 레퍼런스 지형 구조물 실험에서와 마찬가지로 로봇이 오르막 지형을 주행하며 발생하는 뒷바퀴와 앞 바 퀴의 하중차이와 가속에 의한 관성각도 오차로 인한 결과 라고 예상할 수 있다. 따라서 식(2.1), (2.2), (4.1), (4.2)를 이 용하여 각 샘플링 타임마다 각 바퀴에 걸리는 하중의 차 이에 의한 각도오차와, 가속에 의한 각도오차 계산하고 관성측정장치로부터 측정되는 각도 값과의 차를 식(5)에 대입하여 계산하면 로봇이 주행한 지형의 실제 높이 값을 얻을 수 있다. Fig 10의 0.5m/s로 주행하여 얻은 데이터 분 석에서 동역학 보상 전 높이의 최고 값이 31.78cm 로 계 산되었으나, 동역학 식을 이용하여 하중에 의한 오차를 제거해준 결과 26.39cm 의 높이가 얻어졌으며, 26cm인 실 제 지형의 높이 값과 약 0.39cm 의 오차가 발생하는 것을
확인하였다. 이후 30개 이상의 실험 데이터를 모두 분석 한 결과 실제 지형의 높이 값보다 평균적으로
±
0.5cm 의 오차를 보이는 것을 확인하였다. 반면에 1m/s로 주행하 여 얻은 데이터는 각도보상 알고리즘을 적용하여도 약 3cm정도의 오차를 보이는 것을 확인할 수 있었는데, 이는 Fig. 4의 오르막 지형이 레퍼런스 지형과 달리 표면이 많 이 거친 특성으로 인하여 속도에 비례한 더 큰 외란이 관 성 측정 장치에 노이즈로 작용한 결과라고 판단하였다.3.2.3 과속 방지 턱 지형
Fig. 12는 과속 방지 턱 지형에서 실험한 데이터를 분석 하여 출력한 그래프이다. 0.5m/s의 속력으로 주행하고 얻 은 데이터로 추정한 지면의 형상에서는 오르막 지형을 주 행 후 추정한 지면의 형상 결과와 마찬가지로 비교적 정 확한 높이와 각도를 추정하는 것을 확인할 수 있었다. 하 지만 1m/s, 1.5m/s 의 속력으로 주행하고 얻은 데이터를 분 석하여 그래프를 출력해 보았으나, 지면의 형상을 추정하 기가 어려웠다. 실제로 과속 방지 턱 실험 환경에서 1m/s, 1.5m/s 의 속력으로 주행 하였을 때 로봇이 지면으로부터 살짝 떨어지는 현상을 볼 수 있었는데, 지면으로부터 떨 어진 순간의 각도는 접촉 지면의 형상을 인식하기 위한 데이터로 사용될 수 없고, 이 현상(지면으로부터의 분리) 으로 인해 로봇에 가해지는 외란이 추가적으로 발생하여, 본 논문에서 제안한 가속도와 지형 각도에 따른 각도 오 차를 보상하는 알고리즘으로는 MATLAB을 사용하여 출 력한 지면 형상 인식 그래프가 Fig. 11에 나타난 것같이 Fig. 9. Recognition results of the uphill terrain on the speed (a)
0.5m/s, (b) 1m/s, (c) 1.5m/s
0 20 40 60 80 100 120 140 160 180 200
-0.05 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Sampling number
Height (m)
Before compensate (0.5m/s) After compensate (0.5m/s) Before compensate (1m/s) After compenstae (1m/s)
Fig.10. Comparing height of recognized terrain before and after compensate angle in uphill terrain
실제 지형과 많은 차이를 보이는 것을 확인할 수 있었다.
3.2.4 실험 결과 검토
레퍼런스 지형 구조물에서의 실험 데이터를 기준으로
하여 야외 환경에서의 오르막 지형과 과속방지턱 지형에 서의 여러 실험을 진행한 결과, 대체적으로 0.5m/s의 속력 으로 주행하는 경우에는 외란의 영향이 적어 실제 지형정 보와 거의 유사한 결과를 보였다. 하지만 속도를 증가시 키는 경우, 속도 증가에 따라 증가하는 진동 노이즈 뿐만 아니라, 예측이 어려운 동역학적 변수 들로 인하여 정확 한 지면의 형상을 인식하는 것이 어려웠다.
4. 결 론
본 연구는 학습된 데이터에 의존하는 영상센서나 레이 저 거리센서 등으로 만들어지는 월드모델에, 로봇이 실제 로 주행하면서 경험하는 지면의 형상적인 변화들을 실시 간으로 인식하고 보상하여 학습된 데이터베이스를 반드시 필요로 하는 영상 및 레이저 거리센서의 치명적인 단점을 보완하고자 한 기초연구로서, 저속으로 주행하는 경우, 관 성 측정 장치를 통해 얻어지는 각도에 간단한 동역학적 해석을 적용한 노이즈 제거를 통하여 지면의 형상을 정확 하게 인식하는 것을 확인하였다. 하지만, 이러한 시스템이 적용될 로봇들의 동역학적 구조가 서로 일치하지 않는다 는 점과, 속도에 따른 인식 오차가 크다는 문제가 남아있 다. 특히, 속도가 증가할수록 예측 불가능한 로봇의 순간 적인 부양으로 인하여 이를 보상 하기 위한 동역학 수식 을 세우는 것도 어렵다. 이후에는 속도에 강인하고 서로 다른 로봇의 동역학적 구조에 영향을 받지 않는 알고리즘 을 개발하는 것이 목표이다.
[1] D. Kim, J. Sun, S. M. Oh, J. M. Rehg, and A. Bobick,
“Traversability classification using unsupervised on-line visual learning for outdoor robot navigation” in IEEE Intl.
Conf. on Robotics and Automation, pp.518~528, May 2006
[2] Tae Won Kim, Jin Hyoung Kim, Sung Soo Kim, Yun Ho Ko, “Land Preview System Using Lase Range Finder based on Heave Estimation”, Journal of Electronics Engineering, vol. 49, pp. 63~73, no. 1, 2012
[3] Ji Hoon Joung , Kwang Ho An, Jung Won Kang, Woo Hyun Kim, Myung Jin Chung, “3D Terrain Fig. 11. Recognition results of the bump on the speed 0.5m/s, (b)
1m/s, (c) 1.5m/s
0 20 40 60 80 100 120 140 160 180
-0.02 0 0.02 0.04 0.06 0.08 0.1 0.12
Sampling number
Height (m)
Before compensate(0.5m/s) After compensate(0.5m/s)
Fig. 12. Comparing height of recognized terrain before and after compensate angle in bump terrain
References
Reconstruction Using 2D Laser Range Finder and Camera Based on Cubic Grid for UGV Navigation”, Journal of Electronics Engineering, vol. 45, pp. 26~34, no. 6, 2008
[4] Sijong Kim, Jungwon Kang, Yungeun Choe, Sang Un Park, Inwook Shim, Seunguk Ahn, Myung Jin Chung,
“The Development of Sensor System and 3D World Modeling for Autonomous Vehicle”, Journal of Automation and Control Engineering, vol. 17, pp.
531~538, no. 6, 2011
[5] A. Stentz, “Optimal and Efficient Path Planning for Partially-known Enviroments”, Proceedings of the IEEE International Conference on Robotics and Automation, Vol.4, pp. 3310~3317, May 1994
[6] Byoung-gon Park, Jayoung Kim, Jihong Lee, “Terrain Feature Extraction and Classification using Contact Sensor Data”, Journal of Korea Robotics Society, vol. 7, pp. 171~181, no. 3, 2012
[7] Jayoung Kim, Jihong Lee, “Predicting Maximum Traction to Improve Maneuverability for Autonomous Mobile Robots on Rough Terrain”, Journal of Automation and Control Engineering, vol.1, no. 1, 2013.
[8] Jayoung Kim, Jihong Lee, “Prediction of Maneuverability and Efficiency for a Mobile Robot on Rough Terrain through the development of a Testbed for Analysis of Robot-terrain Interaction”, Journal of Korea Robotics Society, vol. 8, no. 2, pp. 116-128, 2013.
[9] Christopher A. Brooks, Karl Iagnemma “Self-supervised terrain classification for planetary surface exploration rovers”, Journal of Field Robotics, vol.39, no. 1, 2012 [10] Byunggon Park, Jonghwa Lee, Jayoung Kim, JihongLee,
“Classification of terrains by body motion and contact force”, Institute of Electronics Engineering, June 2010.
[11] Dupont, E. M., Moore, C. A., Collins, E. G., Jr., Coyle, E., “Frequency response method for terrain classification in autonomous ground vehicles”, Autonomous Robots 24.4, 2008.
[12] Sang Hyun Joo, Jihong Lee, “A Dynamic Modelingof 6
×
6 Skid Type Vehicle for Real Time Traversability Analysis over Curved Driving Path” Journal of Automation and Control Engineering, vol.18, pp. 359- 364, no. 4, 2012.[13] Sang Hyun Joo, Jihong Lee, “A High-speed Autonomous Navigation Based on Real Time Traversability for 6
×
6 Skid Vehicle”, Journal of Automation and Control Engineering, no.3, 2012 [14] Doo-gyu Kim, Ja-young Kim, Jihong Lee, Dong-GeolChoi, In-So Kweon, “Utilizing Visual Information for
Non-contact Predicting Method of Friction Coefficient”, Journal of Electronics Engineering, vol.47, pp.28-34, no.4, 2013.
김 자 영 2008 충북대학교 기계공학과
(공학사)
2011 충남대학교 기계·기계설 계 · 메카트로닉스 공학 과 (공학석사)
2011~현재 충남대학교 기계 · 기계설계 · 메카트로닉 스 공학과 박사과정
관심분야 : 야지 주행로봇, 지능제어, 지형 인식, 양팔 로봇 제어
전 봉 수
2007~현재 충남대학교 메카 트로닉스 공학과 학부과 정
관심분야 : 야지 주행로봇, 지 형 인식, 로봇 위치 추정
이 지 홍 1983 서울대학교 전자공학과
(공학사)
1985 한국과학기술원 전기 및 전자공학과 (공학석사)
1991 한국과학기술원 전기 및 전자공학과 (공학박사) 1994~현재 충남대학교 메카트로닉스 공학과 교수 관심분야 : 양팔 로봇 제어, 로봇 위치 추정, 해양 로
봇 유영, 야지 주행 로봇