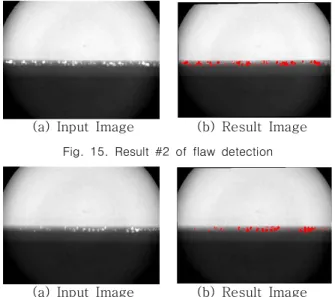
Flaw Detection in Ceramics using Hough transform and Least squares
1)
전체 글
1)
수치


관련 문서
Histopathologic findings of control group at 4 weeks show little bone- implant contact (BIC) around the implant (asterisks) and new-bone formation in the defect
In the change in body composition, body weight did not show a statistically significant change in all items in the exercise group and the control group,
2재화 2요소 헥셔-올린 모형에서는 어느 한 경제에서 어느 한 요소의 양이 증가하면, 그 요소를 집약적으로 사용하는 산업의 생산량은 증가하고 다른
Ross: As my lawfully wedded wife, in sickness and in health, until
glen plaids 글렌 플레이드와 캐시미어 카디건, 캐리지 코트, 그리고 케이프 -> 격자무늬의 캐시미어로 된 승마용 바지, 마부용 코트, 말 그림이 수
다양한 번역 작품과 번역에 관한 책을 읽는 것은 단순히 다른 시대와 언어, 문화의 교류를 넘어 지구촌이 서로 이해하고 하나가
The index is calculated with the latest 5-year auction data of 400 selected Classic, Modern, and Contemporary Chinese painting artists from major auction houses..
1 John Owen, Justification by Faith Alone, in The Works of John Owen, ed. John Bolt, trans. Scott Clark, "Do This and Live: Christ's Active Obedience as the