한국정밀공학회 2013년도 춘계학술대회논문집
서론
1.
. , , , . , , , . 6 3 , . .유압 로터리 액추에이터 구조
2.
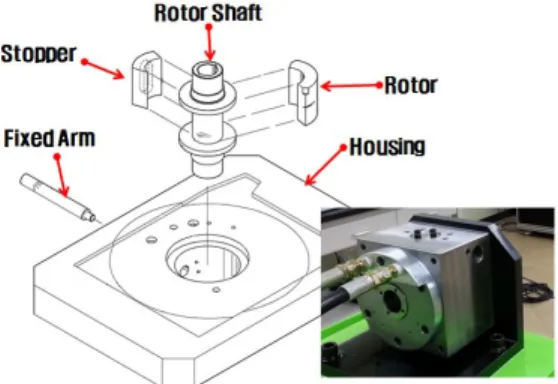
, . . , , , 0.05mm . Fig. 1 .Fig. 1 Structure of Hydraulic Rotary Actuator Fig. 2 . . , .
다관절 로봇 적용 유압 로터리 액추에이터
관절 모듈의 구조 설계
Structure design of hydraulic rotary actuator joint module
for multi-joint robot
*#
최현진
1,
강익수
1,
이승용
1,
김병수
1,
이태호
2,
최성대
3*
#H.J. Choi
1([email protected]) , I.S. Kang
1, S.Y. Lee
1, B.S. Kim
1, T.H. Lee
2, S.D. Choi
31
대구기계부품연구원, 2(주 티에스티 기술연구소) , 3금오공대 기계공학부 Key words : Multi-joint robot, Rotary actuator, Joint module, Structural design
한국정밀공학회 2013년도 춘계학술대회논문집
Fig. 2 Sectional View of Structure
회전구동 완충작용부 설계
3.
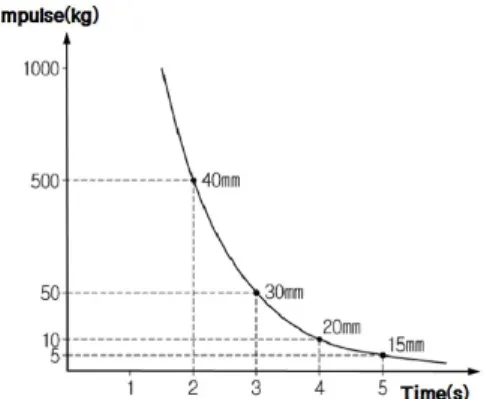
(Weir) . , . .Fig. 3 Shape of triangle weir Fig. 3 (L) . . ( )α 60 90 (d) 5mm 15mm, 20mm, 30mm, 40mm . 45kg/ ,㎠ 20 /minℓ 1 . Fig. 4 .
Fig. 4 Variation of Impulse with length of weir
(L) . , 30mm 50kgf . 30mm .