ICCAS2005 June 2-5, KINTEX, Gyeonggi-Do, Korea
1. INTRODUCTION
Recently, an artificial intelligent(AI) control using fuzzy control, neural networks and genetic algorithm etc. is recognized as important algorithm that improves on performance of power electronics system. This algorithm is developed adaptive AI controller combining with adaptive control algorithm. This combination algorithm is expect to apply to interior permanent magnet synchronous motor(IPMSM) that adaptability and robustness are required.[1]
Indirect vector control is applied extensively to a drive system for an IPMSM high-performance. The PI controller is used very much in an industrial application. But, PI controller had many problems in high performance because of an IPMSM nonlinearity. And the PI controller cannot get satisfactory high performance and robust control to the various parameter variations such as disturbance, speed and torque etc. To solve this problems, an adaptive control has been researched and an adaptive control was better than PI controller.[2] But, this method is very complicated as the basis of mathematical modeling and the algorithm of long calculation time. The direct fuzzy controller was developed to solve these problems but cannot get satisfactory performance in a robust response to the parameter variations.[3] The neural networks was recognized as technique in estimation and control of drive parameters.[4]
The performance of the artificial neural network(ANN) was recognized and studied variously to approximate to function. The performance of this method was better than other vector controls. But because a flux cannot be controlled in this method, effect of saturation appears and use speed sensor.
In this paper, we propose the speed control of an IPMSM using the adaptive fuzzy-neural network(FNN) and an estimation of speed using ANN. First, the adaptive FNN combines a neural network and fuzzy control and it is designed to solve the problem of a PI controller. It is compound of advantages that robust control of fuzzy control and high adaptive control of neural networks. Next, we propose the speed estimated techniques of an IPMSM drive using the ANN. The two layered neural network based on
back-propagation techniques is used to estimate the speed of an IPMSM drive. Finally, we propose the results of analysis to verify the effectiveness of the adaptive FNN and the ANN.
2. DRIVE SYSTEM
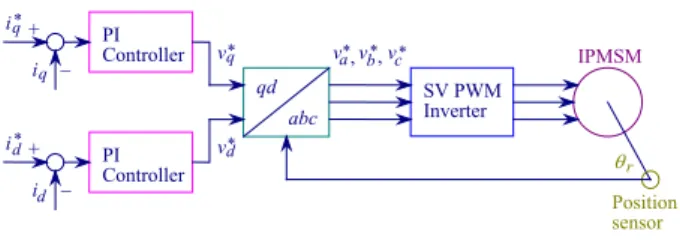
Fig.1 presents the vector control system of IPMSM run by space vector PWM inverter.
PI Controller PI Controller qd abc SV PWM Inverter IPMSM Position sensor q v* q i* d i* q i d i + _ + _ a v* *,vb,vc* θr d v*
Fig. 1 Vector control system of IPMSM
The mathematical model of an IPMSM drive can be described by the following equation (1) to (4)
(
d d r qq)
d d v Ri Li L pi = − +ω /(1)
(
q q r dd r af)
q q v Ri Li L pi = − −ω
−ω
φ
/ (2)(
T
T
B
)
J
p
ω
r=
e−
L−
ω
r/
(3)[
afq d q dq]
e P i L L ii T ( ) 2 3 + − = φ (4)2. DESIGN OF FNN CONTROLLER
Fig.2 shows structure of FNN controller for IPMSM drive.+ _ ωr * ωr eωr p ceωr GE GC Fuzzy-Neuro Controller PWM Inverter + IPMSM d * i q * i ωr GU
Fig. 2 Structure of FNN controller
The Speed Control and Estimation of IPMSM using Adaptive FNN and ANN
Hong-Gyun Lee, Jung-Chul Lee, Su-Myeong Nam, Jung-Sik Choi, Jae-Sub Ko, Dong-Hwa Chung
Department of Electrical Control Engineering, Sunchon National University, Jeonnam, Korea(Tel : +82-61-750-3543; E-mail: [email protected])
Abstract: As the model of most practical system cannot be obtained, the practice of typical control method is limited. Accordingly, numerous artificial intelligence control methods have been used widely. Fuzzy control and neural network control have been an important point in the developing process of the field. This paper is proposed adaptive fuzzy-neural network based on the vector controlled interior permanent magnet synchronous motor drive system. The fuzzy-neural network is first utilized for the speed control. A model reference adaptive scheme is then proposed in which the adaptation mechanism is executed using fuzzy-neural network. Also, this paper is proposed estimation of speed of interior permanent magnet synchronous motor using artificial neural network controller. The back-propagation neural network technique is used to provide a real time adaptive estimation of the motor speed.
The error between the desired state variable and the actual one is back-propagated to adjust the rotor speed, so that the actual state variable will coincide with the desired one. The back-propagation mechanism is easy to derive and the estimated speed tracks precisely the actual motor speed. This paper is proposed the analysis results to verify the effectiveness of the new method. Keywords: IPMSM, Fuzzy-Neural Networks, Fuzzy, Adaptive Control, Sensorless
ICCAS2005 June 2-5, KINTEX, Gyeonggi-Do, Korea
The fuzzy controller can be embodied by a computational
neural network structure. Also the antecedent and consequent parts of the “if-then” rule are constructed by a multi-layer neural network with nonlinearity and learning function. Fig. 3 shows the proposed configuration of FNN controller, where two input variables are the speed error
e
and the change in the speed errorce
respectively, and one output is control variable u*. The construction of the FNN controller beexplained reference in detail[5]
e ce u* wjk wij wci . . . . . . A1 A2 A3 A4
Fig. 3 Construction of FNN controller
3. DESIGN OF ADAPTIVE FNN CONTROLLER
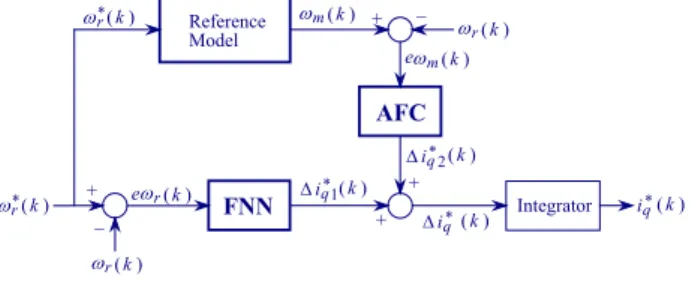
A block diagram of the proposed adaptive FNN controller is shown in Fig. 4. The reference model is used to specify the desired performance that satisfies design criteria such as settle time and overshoot. The model output is the desired response) (k
m
ω
to a command signal. The latter will be compared with the actual response of the systemω
r(k)to generate an adaptation signal that would reduce the difference. As shown in Fig. 4, an adaptive fuzzy controller is added in parallel to the FNN loop. FNN AFC Reference Model Integrator ) ( k r ω *( k) r ω ) ( k m ω *( k) iq1 ∆ + _ + + + _ eωr( k) *( k) r ω *( k) iq2 ∆ *( k) iq ∆ iq*( k) ) ( k m ω e ) ( k r ωFig. 4 Algorithm of proposed adaptive FNN controller Fig. 5 shows adaptive fuzzy controller(AFC) by reference model. AFC loop connects with FNN loop in a parallel.
+ _ ωm( )k _ + 1 − z
AFC
ωr( )k ωm( )k e ωm( )k ce q* ( )k ∆ i 2Fig. 5 AFC with reference model
The error e
ω
m(k) between the model output and the actual speed and its change ceω
m(k), calculated as follows.) ( ) ( ) (k k k e
ω
m =ω
m −ω
r (5) ) 1 ( ) ( ) (k =e k −e k− ceω
mω
mω
m (6) This input variables will be processed by AFC to produce a correction term * ( )2 k
iq
∆ which is added to the output )
(
* 1 k
iq
∆ of the FNN algorithm to yield ∆i*q(k). The reference current is then obtained by integrating i*(k)
q ∆ . )] ( ) ( [ ) 1 ( ) ( * *1 *2 * k i k i k i k iq = q − + ∆q +∆q (7)
4. SPEED ESTIMATION USING ANN
An ideal application for ANN is in the field of nonlinear system identification. Virtually any discrete-time nonlinear system may be represented by the Nonlinear AutoRegressive Moving Average with eXogenous inputs(NARMAX) model, which represents a system in terms of its delayed inputs and outputs. The NARMAX model has the general form:)) ( , ), ( ), ( , ), ( ( ) 1 (k+ =f yk ⋅ ⋅⋅y k−dy uk ⋅ ⋅⋅uk−du y (8) Where du, y
d are the maximum delay in the input and output vector u,y respectively.
This form of model is ideal for system identification purposes because the model is expressed entirely in terms of known quantities.
An ANN may be used to identify the NARMAX model of a system by making the arguments of equation (8) the inputs to the ANN and making the output of the ANN be the one-step-ahead(predicted) output vector y(k+1) as shown in Fig. 6. TDL denotes a tapped delay line whose outputs are delayed values of its input. The ANN may then be trained to emulate the function f(.) in equation (8) by comparing the predicted output vector with the actual output vector at time(k+1), and using the error to update the ANN weight via the back- propagation algorithm (BPA).
u k( ) y k( ) + _ k( ) ε y k( ) Unknown plant ANN Estimation y k( )+1 1/z TDL TDL
Fig.6 System estimation using ANN
The estimated speed of IPMSM for system estimation using ANN is computed as follows.
{
}
) 1 ( ) 1 ( ˆ )] ( ˆ ) ( [ ) 1 ( ˆ )] ( ˆ ) ( [ ) ( ˆ ) ( ) ( ˆ ) ( ˆ ) ( ˆ ) 1 ( ˆ 2 2 − ∆ + − − − − − + = ∆ + = ∆ + = + k W T k k k k k k T k T k W k k k k q d d d q q r r r r r α φ φ φ φ φ φ η ω ω ω ω ω (9) Where Tis the sampling period andη
is the trainingcoefficient. The training coefficient
η
represents the training rate in learning procedure. The larger this coefficient the largerICCAS2005 June 2-5, KINTEX, Gyeonggi-Do, Korea
the change in the weights. For practical implementation we
choose a learning rate that is as large as possible without leading to oscillation. This offers the most rapid learning. The coefficient
α
determines the effect of the past weight changes on the current weight.The rotor flux angle
r
θˆ which is necessary for derivation of the reference of stator current, is computed from the estimated speed using the proposed system.
) ( ˆ ) ( ˆ ) 1 ( ˆ k k T k r r r θ ω θ + = + ⋅ (10)
5. PERFORMANCE RESULT OF SYSTEM
Fig.7 shows drive system of IPMSM with adaptive FNN and ANN. This controller provide a robust performance for the system, both respect with parameter variations and operating points *r ω +_ * q i * d i =0 Current Control * a v b* v * c v r ω r θ A-FNN ANN SV PWM Inverter ADC IPMSM * a i * b i * b v * a v
Fig. 7. Drive system of IPMSM with adaptive FNN and ANN The parameters of the IPMSM are listed in Table 1.
Table 1 Parameters of the IPMSM IPMSM : 220V 2.2[kW] 4-Pole Rs= 0.98 [ ]Ω φa= 0.147[ ] freq.= 60 [Hz] Ld= 9.1 [ ]Η Lq= Iam= m 18.82 [ ]mΗ 15 [ ]A Wb
Fig. 8 shows the result that compares with speed and q-axis current of PI, FNN and adaptive FNN(A-FNN) controller. The reference speed is operated as rating speed 1800[rpm] from 0.2[sec], and load torque is increase 3[N.m]) from 0.6[sec] to 0.8[sec].
Fig. 9 shows extension of Fig.8. In Fig. 9(a), the speed of adaptive FNN controller is reached steady-state more rapidly and smaller overshoot than PI and FNN controller. In Fig. 9(b), adaptive FNN controller is estimated rapidly than PI and FNN controller at load torque.
Fig. 10 shows response comparison with change of load torque and step command speed. When the reference speed is set to 1500[rpm] and then load torque is 3[N.m] at 0.6[sec]. The reference speed is changed 1000[rpm] at 0.7[sec]. The adaptive FNN controller revealed good response property than FNN controller
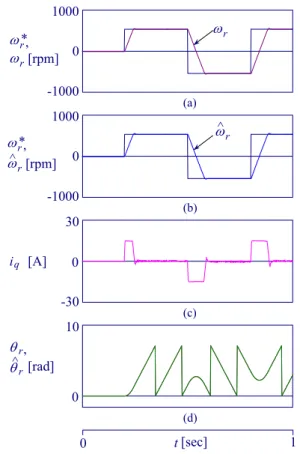
Fig.11 shows the response characteristics obtained from the FNN controller when the reference speed is first set to zero then to 500[rpm] and then to –500[rpm]. Fig.11(a) shows the command speed and real speed. Fig.11(b) shows the command speed and estimated speed. Fig.11(c) shows q-axis currents. Fig.11(d) shows real angle and estimated angle in ANN.
Fig.12 shows the response characteristics of adaptive FNN controller on the same condition with Fig.11. The adaptive FNN controller shows excellent performance than FNN
controller. The proposed adaptive FNN controller performance is improved more than FNN controller on a wide operation condition such as a change of speed and load torque. And ANN’s estimation is revealed favorable performance.
. (b) 0 30 iq[A] 0 t 1 A-FNN FNN PI (a) 0 ωr [rpm] 2000 ωr* A-FNN FNN PI -30 [sec]
Fig. 8. The comparison of response characteristics with PI, FNN and Adaptive FNN controller
(a) 700 ωr [rpm] 2000 ωr* A-FNN FNN PI 0.3 t 0.45 (b) 1750 ωr [rpm] 1850 ωr* A-FNN FNN PI 0.55 t [sec] 0.9 [sec]
Fig. 9. The comparison of response characteristics with PI, FNN and Adaptive-FNN controller
(a) 700 ωr [rpm] 1800 ωr* A-FNN FNN (b) 700 ωr [rpm] 1800 ωr* 0.55 t 0.85 (c) 0 30 iq [A] -30 A-FNN FNN A-FNN FNN ^ [sec]
Fig. 10. Response comparison with change of load torque and step command speed
ICCAS2005 June 2-5, KINTEX, Gyeonggi-Do, Korea
(a) (c) 0 1000 0 30 iq[A] 0 t 1 -1000 (b) 0 1000 -1000 (d) 0 10 θr[rad] -30 ωr[rpm] ωr*, ωr[rpm] ωr*, ωr ωr ^ ^ θr ^, [sec]
Fig. 11. Response characteristic of FNN and ANN controller with change of step command speed
(a) (c) 0 1000 0 30 iq [A] 0 t 1 -1000 (b) 0 1000 -1000 (d) 0 10 θr [rad] -30 ωr[rpm] ωr*, ωr[rpm] ωr*, ωr ^ ω^r θr ^, [sec]
Fig. 12. Response characteristic of A-FNN and ANN controller with change of step command speed
6. CONCLUSION
In this paper, we proposed an adaptive FNN controller for high performance control of IPMSM drive. And proposed estimation of speed using ANN controller. FNN controller composes an antecedence of fuzzy rules and consequent by clustering methods and multi-layer neural networks. FNN controller has a merit such as a high adaptive control with the neural networks and a robust control of a fuzzy control. To improve the performance, we apply an adaptive mechanism based on a reference model. We applied the adaptive FNN and ANN controller to an IPMSM drive and analyzed response characteristic of parameter variation, steady state and transient state etc. The proposed control system also has strong robustness and insensitive to parameter variation.
REFERENCES
[1] E. Cerruto, A. Consoil, P. Kucer and A. Testa, "A fuzzy logic quasi sliding -mode controlled motor drive," in Proc. IEEE ISIE Conf. Rec., Budapest, Hungary, June 1-3, pp. 652-657, 1993.
[2] K. J. Astrom and B. Wittenmark, "Adaptive control," Addison-Wesley, 1989.
[3] D. H. Chung, "Fuzzy control for high performance vector control of PMSM drive system," KIEE, vol. 47, no. 12, pp. 2171-2180, 1998.
[4] A. K. Toh, E. P. Nowicki and F. Ashrafzadeh, "A flux estimator for field oriented control of an induction motor using an artificial neural network," IEEE IAS Conf. Rec. Ann. Meet., vol. 1, pp. 585-592, 1994.
[5] D. H. Chung, "Speed control of induction motor drive using adaptive NNF," Proceeding of Second Annual Meeting of Nano Science and Technology, vol. 2, pp. 97-98, 2004.