저작자표시-비영리-동일조건변경허락 2.0 대한민국 이용자는 아래의 조건을 따르는 경우에 한하여 자유롭게
l 이 저작물을 복제, 배포, 전송, 전시, 공연 및 방송할 수 있습니다. l 이차적 저작물을 작성할 수 있습니다.
다음과 같은 조건을 따라야 합니다:
l 귀하는, 이 저작물의 재이용이나 배포의 경우, 이 저작물에 적용된 이용허락조건 을 명확하게 나타내어야 합니다.
l 저작권자로부터 별도의 허가를 받으면 이러한 조건들은 적용되지 않습니다.
저작권법에 따른 이용자의 권리는 위의 내용에 의하여 영향을 받지 않습니다. 이것은 이용허락규약(Legal Code)을 이해하기 쉽게 요약한 것입니다.
Disclaimer
저작자표시. 귀하는 원저작자를 표시하여야 합니다.
비영리. 귀하는 이 저작물을 영리 목적으로 이용할 수 없습니다.
동일조건변경허락. 귀하가 이 저작물을 개작, 변형 또는 가공했을 경우 에는, 이 저작물과 동일한 이용허락조건하에서만 배포할 수 있습니다.
공학석사학위논문
바람을 고려한 발사체의 하중경감 폐회로 유도제어 기법 연구
Closed-loop Load Relief Guidance and Control Algorithm for Launch Vehicle
2014년 2월
서울대학교 대학원
기계항공공학부
이 홍 주
국문 초록
인공위성은 현대 생활에서 통신, 방송, 기상 및 해양관측 등의 민간분야뿐만 아니라 정찰, 감시 등의 군용임무를 수행하는데 필수적으로 자리매김하였다. 발사체는 이러한 위성을 원하는 궤도에 투입하도록 설계된다. 발사체를 발사하는 과정에서 고려해야 할 중요한 요소 중 하나가 공력하중이다. 대기중에서 과도한 공력하중에 의한 측력은 발사체에 구조파손을 야기할 수 있기 때문이다. 따라서 하중경감 유도 및 제어기법을 통해 공력하중을 줄이는 것이 필요하다. 공력하중은 공기 밀도가 높은 대기권 하층부에서 주로 발생하므로 하중경감 기법은 발사체의 1단 비행에서 고려된다.
본 논문에서는 발사체의 하중경감을 위해 개회로 방식의 하중경감 기법과 폐회로 방식의 하중경감 기법, 그리고 두 방식을 혼합한 기법을 제안하였다. 발사 전 바람정보를 이용하여 발사체 궤적최적화를 수행함으로써 자세 유도 명령을 얻는 개회로 방식의 하중경감 제어기를 설계하고, 몬테카를로 시뮬레이션을 통해 변화하는 바람에 대한 강건성을 확인하였다. 또한 슬라이딩 모드 기법을 이용하여 실시간으로 바람에 대응할 수 있는 폐회로 방식의 하중경감 제어기를 설계하였다.
마지막으로 두 기법의 장단점을 분석한 후, 두 방식을 혼합한 기법을 제안하였다. 발사체의 비선형 6자유도 운동을 모델링하였으며, 주어진 유도명령을 추종하기 위한 궤환선형화 제어기를 설계하였다. 그리고 6자유도 시뮬레이션을 통해 제안한 하중경감 기법들의 성능을 검증하였다.
주요어 : 하중경감, 발사체, 궤적최적화, 슬라이딩 모드 유도, 받음각 제어 학번 : 2012-20696
목 차
국문초록 ... i
목차. . . ...ii
표목차.... ...v
그림목차 ... vi
1. 서론... ... 1
2. 개회로 방식 하중경감 기법 ... 4
2.1 발사체의 3자유도 운동 모델링 ... 4
2.1.1 좌표계와 운동방정식 ... 4
2.1.2 발사체 모델 및 비행 요구조건 ... 7
2.2 궤적최적화 ... 9
2.2.1 궤적최적화 기법 ... 9
2.2.2 목적함수 설정 및 제어변수 매개변수화 ... 10
2.3 최적화 결과 ...12
2.3.1 바람 모델 ... 12
2.3.2 개회로 하중경감 기법 수치 시뮬레이션 (3자유도) ... 13
2.4 몬테카를로 시뮬레이션 ...20
3. 폐회로 방식 하중경감 기법 ... 25
3.1 발사체의 6자유도 운동 모델링 ...25
3.1.1 중력에 의한 힘과 모멘트 ... 26
3.1.2 추력에 의한 힘과 모멘트 ... 26
3.1.3 공력에 의한 힘과 모멘트 ... 28
3.1.4 엔진관성에 의한 힘과 모멘트 ... 29
3.1.5 휨에 의한 힘과 모멘트 ... 31
3.1.6 뉴턴-오일러 방정식과 질량방정식 ... 34
3.2 받음각과 옆미끄럼각 제어를 위한 슬라이딩 모드 유도 ...36
3.2.1 받음각과 옆미끄럼각의 미분방정식 ... 36
3.2.2 슬라이딩 모드 기법을 이용한 각속도 유도 명령 생성 ... 38
3.3 궤환선형화 제어기 설계 ...42
3.3.1 각속도 명령 제어기 설계 ... 42
3.3.2 자세명령 제어기 설계 ... 45
3.4 개/폐회로 하중경감 기법 수치 시뮬레이션 (6자유도) ...48
4. 개회로 및 폐회로 하중경감 혼합기법 ... 57
4.1 혼합방식의 하중경감 기법 ...57
4.1.1 개회로 및 폐회로 하중경감 기법의 특성 ... 57
4.1.2 개회로 및 폐회로 하중경감 기법의 혼합 알고리듬 ... 58
4.2 혼합 하중경감 수치 시뮬레이션 (6자유도) ...60
5. 결론. . . ... 69
참고문헌 ... 70
Abstract ... 74
표 목차
[표 2.1] 발사체 제원 ... 7 [표 2.2] 초기질량, 최종위치, 최종속도 (개회로 하중경감) ... 19 [표 2.3] 고도별 바람 특성 ... 20 [표 2.4] 최종위치, 최종고도, 최종속력, 총받음각과 동압의
..곱의 최대값 (정상명령) ... 23 [표 2.5] 최종위치, 최종고도, 최종속력, 총받음각과 동압의
..곱의 최대값 (최적명령) ... 24 [표 3.1] 최종고도, 최종속력, 총받음각과 동압의 곱의 최대값
..(개/폐회로 하중경감) ... 56 [표 4.1] 개회로 및 폐회로 하중경감 기법의 장단점 ... 57 [표 4.2] 최종고도, 최종속력, 총받음각과 동압의 곱의 최대값
..(성능비교) ... 68
그림 목차
[그림 2.1] 좌표계 ... 5
[그림 2.2] 바람 프로파일 ... 12
[그림 2.3] 오일러각 시간반응 (개회로 하중경감) ... 15
[그림 2.4] ECI 위치 시간반응 (개회로 하중경감) ... 15
[그림 2.5] 절대속력 시간반응 (개회로 하중경감) ... 16
[그림 2.6] 고도 시간반응 (개회로 하중경감) ... 16
[그림 2.7] 받음각 및 옆미끄럼각 시간반응 (개회로 하중경감) ... 17
[그림 2.8] 총받음각 시간반응 (개회로 하중경감) ... 17
[그림 2.9] 동압 시간반응 (개회로 하중경감) ... 18
[그림 2.10] 총받음각과 동압의 곱 시간반응 ..(개회로 하중경감) ... 18
[그림 2.11] 1,000개의 바람에 대한 총받음각 및 총받음각과 ..동압의 곱 (정상명령) ... 22
[그림 2.12] 1,000개의 바람에 대한 총받음각 및 총받음각과 ..동압의 곱 (최적명령) ... 22
[그림 3.1] 발사체와 좌표계 ... 25
[그림 3.2] 추력 ... 27
[그림 3.3] 공력 ... 28
[그림 3.4] 엔진관성 ... 30
[그림 3.5] 제어시스템 ... 47
[그림 3.6] 바람 프로파일 (북풍기준) ... 48
[그림 3.7] 바람 프로파일 (동풍기준) ... 49
[그림 3.8] 오일러각 시간반응 (개/폐회로 하중경감) ... 51
[그림 3.9] ECI 위치 시간반응 (개/폐회로 하중경감) ... 52
[그림 3.10] 각속도 시간반응 (개/폐회로 하중경감) ... 52
[그림 3.11] TVC 타각 시간반응 (개/폐회로 하중경감) ... 53
[그림 3.12] 절대속력 시간반응 (개/폐회로 하중경감) ... 53
[그림 3.13] 고도 시간반응 (개/폐회로 하중경감) ... 54
[그림 3.14] 받음각 시간반응 (개/폐회로 하중경감) ... 54
[그림 3.15] 옆미끄럼각 시간반응 (개/폐회로 하중경감) ... 55
[그림 3.16] 총받음각 시간반응 (개/폐회로 하중경감) ... 55
[그림 3.17] 총받음각과 동압의 곱 시간반응 ..(개/폐회로 하중경감) ... 56
[그림 4.1] 혼합 알고리듬 ... 59
[그림 4.2] 오일러각 시간반응 (성능비교) ... 62
[그림 4.3] 오일러각 시간반응 (폐회로 기법 제외) ... 62
[그림 4.4] ECI 위치 시간반응 (성능비교) ... 63
[그림 4.5] 각속도 시간반응 (성능비교) ... 63
[그림 4.6] TVC 타각 시간반응 (성능비교) ... 64
[그림 4.7] 절대속력 시간반응 (성능비교) ... 64
[그림 4.8] 고도 시간반응 (성능비교) ... 65
[그림 4.9] 받음각 시간반응 (성능비교) ... 65
[그림 4.10] 받음각 시간반응(확대) (성능비교) ... 66
[그림 4.11] 옆미끄럼각 시간반응 (성능비교) ... 66
[그림 4.12] 총받음각 시간반응 (성능비교) ... 67
[그림 4.13] 총받음각과 동압의 곱 시간반응 (성능비교) ... 67
1. 서론
현대 생활에 있어서 인공위성은 통신, 방송, 기상 및 해양관측을 포함한 민수분야뿐만 아니라 정찰감시 등이 요구되는 군수분야에서도 필수적인 서비스를 제공한다. 이러한 위성을 원하는 궤도에 정확히 투입하기 위해 막대한 추진력을 갖는 발사체가 필요하다. 발사체를 한 번 발사할 때 드는 시간과 경제적 비용이 매우 크기 때문에 임무의 성공 여부가 중요하다. 따라서 발사체는 다른 시스템들에 비해 보수적으로 설계해야 한다.
발사체를 개발하고 운용할 때 고려해야 할 중요한 요소 중의 하나가 공력하중이다. 발사체는 단면적에 비해 길이가 길어서 과도한 공력하중을 받게 될 경우 큰 휨하중이 걸리게 되고, 이에 따라 발사체 구조에 파손이 발생할 수 있기 때문이다. 이에 대응하기 위해 발사체 구조를 보강하면 탑재 중량이 작아지기 때문에 좋은 성능의 발사체를 개발할 수 없다. 따라서 하중경감 유도 및 제어기법을 통해 공력하중을 줄이는 것이 필요하다. 공력하중은 공기밀도가 높은 대기권 하층부에서 주로 발생하므로 하중경감 기법은 발사체의 1단 비행에서 고려된다.
지금까지 발사체의 하중경감과 관련되어 크게 두 가지 연구가 수행되었다. 하나는 개회로 방식으로 발사 전 측정된 바람정보를 이용하여 발사체의 기준궤적을 얻어서 이를 추종하는 유도명령을 생성하는 방식이다.[1,2] 일반적으로 궤적최적화는 시간유한요소법, 사격방법 등의 간접법과[3,4] SQP(Sequential Quadratic Programming), collocation 등의 직접법을 이용하여 수행한다.[5,6]
바람이 심하게 불 경우에는 발사를 포기하고 연기하여야 한다.[7] 이 방식은 발사 전 궤적을 설계하고 비행 중에 주어진 궤적을 추종하도록
제어하는 방법이기 때문에 실시간 바람의 변화에 대처하지 못한다는 단점이 있다. 따라서 궤적최적화를 수행할 때 공력하중에 대해 임계치보다 강한 구속조건을 고려하여 강건성을 확보하기도 한다.[8]
또 다른 방법은 실시간으로 발사체의 상태정보를 이용하여 비행 중에 공력하중을 줄이도록 유도 및 제어명령을 계산하는 폐회로 방식이다.
하중경감에서 중요한 것은 받음각 정보인데 발사체는 비행 중에 바람에 대한 정보를 실시간으로 측정하는 것이 어렵다. 따라서 측가속도를 측정하여 선형제어 명령을 얻는 방법이 사용되기도 했으며,[9] 비행 중 발사 직전의 바람을 이용하여 실시간으로 궤적최적화를 수행하고 이를 통해 유도명령을 얻는 방법 등이 제안되었다.[8] 그러나 발사체는 비선형성이 강하므로 선형제어의 한계가 존재하며, 실시간으로 궤적최적화를 수행하는 것은 계산 속도의 문제뿐 아니라 비행 중의 바람을 사용하지 않는다는 문제를 갖고 있다. 이러한 이유들로 현재까지는 개회로 방식의 유도가 많이 사용되고 있다.
본 논문에서는 발사체의 1단 비행시 받게 되는 공력하중을 경감하기 위해 개회로 방식과 폐회로 방식의 유도제어기를 설계하였다. 개회로 방식으로는 발사체의 3자유도 운동을 고려하여 SQP 알고리듬을 이용한 자세명령을 얻는 궤적최적화를 수행하였다. 몬테카를로 시뮬레이션을 통해 설계된 자세제어 명령이 변화하는 바람에 대해 강건한지 확인하였다. 폐회로 방식으로는 발사체의 6자유도 운동을 고려하였으며, 슬라이딩 모드 기법을 이용하여 받음각을 줄이기 위한 각속도 유도명령을 계산하였다. 주어진 각속도 명령을 추종하기 위한 제어기는 궤환선형화 기법을 이용하여 설계하였다. 마지막으로 두 방식의 단점을 보완하기 위한 혼합기법을 제안하였다. 제안한 기법들의 성능을 검증하기 위해 6자유도 비선형 시뮬레이션을 수행하였다.
본 논문의 구성은 다음과 같다. 본 논문의 2장에서는 개회로 방식의 하중경감 기법에 대해 정리하였다. 발사체의 3자유도 운동을 모델링하고,
궤적최적화 기법에 대해 정리하였다. 또한, SQP 알고리듬을 이용한 궤적최적화 결과와 강건성을 확인하기 위한 몬테카를로 시뮬레이션을 수행하였다. 본 논문의 3장에서는 폐회로 방식의 하중경감 기법에 대해 정리하였다. 발사체의 6자유도 운동을 모델링하고, 받음각과 옆미끄럼각을 줄이기 위한 슬라이딩 모드 유도 기법에 대해 정리하였다.
그리고 주어진 각속도 명령을 추종하도록 궤환선형화 제어기의 설계과정을 정리하고, 비선형 시뮬레이션을 통해 설계된 유도 제어기의 성능을 검증하였다. 4장에서는 제안한 개회로 방식과 폐회로 방식의 하중경감 기법에 대해 각각의 특성을 정리하고 비교하였으며, 두 방식을 혼합하여 시뮬레이션을 수행한 결과를 정리하였다. 끝으로 5장에서 결론과 향후 연구과제에 대해 언급하였다.
본 논문은 다음과 같은 의의를 갖는다.
첫째, 개회로 방식의 하중경감 기법을 통해 1단 유도명령을 설계하는 알고리듬을 개발하고, 몬테카를로 시뮬레이션을 이용하여 개회로 방식의 하중경감이 강건성을 갖는 것을 확인하였다.
둘째, 폐회로 방식의 하중경감 기법을 통해 실시간으로 받음각을 제어하는 유도 제어기를 설계하였다.
셋째, 개회로 방식의 하중경감과 폐회로 방식의 하중경감 기법의 특성을 정리하였으며, 두 방식을 혼합하는 알고리듬을 제안하였다.
2. 개회로 방식 하중경감 기법
이 장에서는 발사체의 3 자유도 운동을 모델링하고, 궤적최적화에 대해 살펴본다. 그리고 SQP 알고리듬을 이용하여 주어진 요구조건을 만족하도록 궤적최적화를 수행하고, 몬테카를로 시뮬레이션을 통해 설계된 유도제어기의 강건성을 검증한다.
2.1 발사체의 3자유도 운동 모델링
2.1.1 좌표계와 운동방정식[10]
발사체 운동방정식 유도에 사용하게 될 좌표계는 그림 2.1에서 보듯이 지구중심 관성좌표계(ECI frame), 지구중심 회전좌표계(ECEF frame), 유도좌표계(Guidance frame), 그리고 동체좌표계(Body fixed frame)이다. 지구중심 관성좌표계는 지구중심에 고정되어 있고, 자전축을
Z
I 축, 그리니치 자오선과 적도면이 교차하는 방향을X
I 축, 그리고 오른손 좌표계를 만족하도록Y
I 축으로 선택한다. 이 좌표계는 발사 순간 우주공간에 고정된다. 지구중심 회전좌표계는 발사 순간 우주공간에 고정되는 지구중심 관성좌표계와 달리 지구의 자전을 따라 회전하는 좌표계이다. 유도좌표계는 관성좌표계이며 항법 시작 시점에 관성공간에 고정되는 좌표계이다. 발사 시점에 지구 타원체에 대해 발사대에서 수직인 방향을X
G 축, 발사 방위각 방향을Z
G 축, 그리고 오른손 좌표계를 만족하도록Y
G 축을 설정한다. 발사체의 자세각(오일러각)은 유도좌표계를 기준으로 한다. 마지막으로동체좌표계는 발사체에 고정된 좌표계로
X
b 축은 기체축이며, 비행시 아래 방향을Z
b축, 오른쪽 방향을Y
b축으로 설정한다.그림 2.1 좌표계
발사체를 질점으로 가정하여 지구중심 관성좌표계에서 발사체의 3자유도 운동방정식은 다음과 같이 표현된다.
I I
r = V
(2.1)1
I I I
V F g
m
= +
(2.2)0 vac
vac
m T
g Isp
= −
(2.3)여기서
r
I는 발사체의 위치벡터,V
I는 속도벡터이며,
m
은 발사체의 질량,F
I는 추력과 공력의 합,
g
I 는 중력가속도이다. 그리고,
0,
vac vac
T g Isp
는 각각 진공상태에서의 추력, 지구표면에서의 중력가속도, 진공상태의 비추력이다. 관성좌표계에서의 힘F
는
동체좌표계에서 계산한 후에 좌표계 변환을 거쳐 관성좌표계에서 표현한다. 추력 편향이 없다고 가정했을 때 동체좌표계에서의 힘은 다음과 같이 표현된다.
b
T D
F Y
N
−
=
−
(2.4)vac e
T = T − A p
(2.5)( )
D = qSC
DM
(2.6)( )
Y qSC
YM
β
β
=
(2.7)( )
N qSC
NM
α
α
=
(2.8)여기서
T
는 추력,D
는 항력을 나타내며,Y
와N
은 각각 동체좌표계의 y축과 z축에 평행하는 수직방향 힘을 나타낸다. 또한,A
e는 노즐 단면적,p
는 대기압,q
는 동압,S
는 기준 단면적이고,, ,
D Y N
C C C
β α 는 공력계수이며,
α β ,
는 각각 받음각과 옆미끄러짐각이다. 식 (2.4)를 이용하여 힘F
b를 구하면, 동체좌표계에서 관성좌표계로 변환하는 행렬
C
I b/ 를 이용해서 다음과 같이F
I를 구할 수 있다.
/
I I b b
F = C F
(2.9)
한편, 마하수, 동압, 받음각, 옆미끄럼각은 바람에 대한 상대속도로 구해진다. 바람에 대한 상대속도
V
r은 다음과 같이 계산할 수 있다.
r I E w
V = V − w × − r V
(2.10)여기서
w
E는 지구 회전 각속도이고,V
w는 바람의 속도이다.
2.1.2 발사체 모델 및 비행 요구조건
본 논문에서 고려한 발사체 모델은 KSLV-II의 예상 모델이다.
공력하중을 줄이는 것이 본 논문의 목적이므로 공기밀도가 높은 대기권 하층부를 지나는 1단 비행만을 고려하였다. 발사체의 발사위치는 전라남도 외나로도의 나로우주센터로 가정하였다. 발사체의 제원은 표 2.1에 정리하였다.
지상추력 (N)
2.63 10 ×
6발사 고각 (deg)
90
발사 방위각 (deg)
190
목표위치(ECI) (m)
(-3,292,652, 4,196,236, 3,587,466)
목표속도(ECI) (m/s)(-1,485.152, 963.794, -287.328)
표 2.1 발사체 제원
발사체가 비행 중에 요구되는 조건은 다음과 같다. 발사체가 1단 비행이 종료되었을 때의 위치는 목표위치로부터 1km 이내에, 비행 종료 시의 속도와 목표속도로부터의 차이는 10m/s 이내에 들어가야 한다.
또한, 하중경감을 위한 구속조건을 고려해야 한다. 이를 위해 공력으로 인해 생기는 벤딩모멘트 값인 받음각과 동압의 곱을 임계치보다 작도록 비행해야 한다. 여기서 받음각은 총받음각으로
발사체는 기체축에 대해서 대칭인 형상을 갖기 때문에 다음과 같이 구할 수 있다.
2 2
cos
1t
w b
w b
V V V V α
α β
=
−
≈ +
⋅
(2.11)여기서
V
b와
V
w는 각각 발사체의 속도와 바람의 속도이며,
α
와β
는 각각 받음각과 옆미끄럼각을 나타낸다. 위에서 언급한 구속조건들을 정리하면 다음과 같다.target
1, 000 ( )
f f
t t
r − r ≤ m
(2.12)target
10 ( / )
f f
t t
V − V ≤ m s
(2.13)
t
q const
α ≤
(2.14)2.2 궤적최적화
2.2.1 궤적최적화 기법
구속조건을 만족하면서 성능을 최대화시키는 문제는 다양한 공학 설계에서 고려되고 있는 최적화 문제이다. 최적화 문제는 크게 대수방정식 형태의 구속조건으로 이루어진 매개변수 최적화 문제와 미분방정식과 대수방정식 형태로 구속조건이 이루어진 동적 최적화로 나눌 수 있다. 발사체는 미분방정식 형태의 구속조건인 운동방정식과 비행 요구에 따른 구속조건을 만족해야 하므로, 동적 최적화 알고리듬을 사용하여 궤적최적화를 수행해야 한다.
궤적최적화 문제를 푸는 기법은 다시 간접법과 직접법으로 나누어진다.[11] 간접법은 변분법을 이용하여 최적화 문제를 푸는 방법으로 준상태변수를 도입한 후 상태변수 방정식과 함께 필요조건을 만족하는 두점경계치문제를 풀어서 해를 구한다. 이 방법은 해의 정확도가 높지만 준상태변수의 물리적 의미가 애매하여 초기값을 선정하기 어렵고 계산속도가 오래 걸린다는 단점이 있다. 간접법으로 주로 사용되는 방법으로는 Newton-Raphson method, shooting method, time finite element method 등이 있다.[12-16] 한편, 직접법은 제어변수만 매개변수화하거나, 상태변수와 제어변수 모두 매개변수화하여 최적해를 찾는 방법이다. 준상태변수를 사용하지 않기 때문에 간접법에서 다루기 어려운 준상태변수의 초기값 문제가 없으며 계산속도가 빠르다는 장점이 있지만, 해의 정확도가 떨어진다는 단점이 있다. 그러나 직접법과 관련된 알고리듬이 개발되면서 정확도 역시 개선되어 다양한 최적화 문제에 직접법이 많이 사용되고 있다.
직접법에는 collocation method, SQP(Sequential Quadratic Programming) 알고리듬 등이 존재한다.[17-20]
본 장에서는 직접법의 일종인 SQP 알고리듬을 이용하여 궤적최적화 문제를 풀고자 한다. SQP 알고리듬은 국소적으로 테일러 시리즈로 전개된 2차 목적함수와 선형 구속조건을 갖는 문제를 풀어서 최적해를 구하는 기법이다.
2.2.2 목적함수 설정 및 제어변수 매개변수화
다단발사체의 경우 궤적최적화의 목적함수는 일반적으로 최종질량으로 설정한다.[9,10,21] 최종질량을 최대화하는 것은 발사체의 성능을 평가하는 데 주요 지표로 사용되는 탑재부 질량을 최대화하는 것과 같기 때문이다. 또한, 탑재부 질량이 정해져 있을 경우에는 위성의 연료 탑재량을 최대화하는 문제가 되어 위성의 수명을 늘일 수 있다.
본 연구에서 목적함수는 초기질량으로 설정하였다. 발사체의 1단 연소구간에서는 고정된 추력비행을 수행하기 때문에 사용하는 질량이 일정하다. 따라서 초기질량을 최대화하는 것은 2단 이상의 질량을 최대화하는 것과 같다.
최적화의 제어변수로는 시간에 따른 발사체의 자세각(오일러각)으로 설정하였다. 이는 발사체의 궤적을 시간에 따른 자세로 표현할 수 있기 때문이다. 본 연구에서는 궤적최적화를 위해 직접법 중에서 외연적 방법(explicit method)을 사용하여 제어변수인 자세명령을 시간에 따라 매개변수화한 후, 상태변수들은 운동방정식을 적분하는 형태로 최적화를 수행하였다. 자세각의 노드점은 최종시간인 125초까지 5초간격으로 설정하였다. 수직이륙 구간인 0초에서 10초까지는 수직이륙을 위하여 자세가 변하지 않는다. 총받음각과 동압의 곱은 비행 중 임계치가 2,600Pa-rad이므로, 이보다 작은 값인 500Pa-rad 을 구속조건으로 설정하였다. 최적화의 성능지수와 최적화 변수, 그리고 전절에서 언급한
구속조건들을 정리하면 다음과 같다.
maximize J = m
0, t
f= 125 (sec)
(2.15){ ( ),
0( ), ... ,
1( ),
f( ),
0( ), ... ,
1( ),
f( ) ,
0}
p = q t q t q t ψ t ψ t ψ t m t
(2.16)i
-
t = i th node
target
1, 000 ( )
f f
t t
r − r ≤ m
(2.17)target
10 ( / )
f f
t t
V − V ≤ m s
(2.18)
90 (deg)
, 0 10
0 (deg) 0 (deg) ,
for t for all t q
ψ φ
= ≤ ≤
=
=
(2.19)
500 ( )
t
q Pa rad
α ≤ ⋅
(2.20)2.3 최적화 결과
2.3.1 바람 모델
우리나라는 중위도에 위치하므로 편서풍의 영향을 받으며 주로 서풍이 분다. 그러나 고도 20km 이상에서는 오존에 의한 복사 흡수량이 여름과 겨울에 따라 달라 여름에는 동풍, 겨울에는 서풍이 형성된다. 풍속은 대류권계면인 고도 12km~13km를 경계로 변화를 보인다. 대류권계면 아래에서는 고도에 따라 풍속이 증가하며, 위쪽은 고도에 따라 풍속이 감소한다. 최대 풍속은 겨울철 평균 70m/s, 여름철 평균 20m/s인데, 이는 우리나라에 영향을 미치는 한대 제트류의 계절적 변동에 의한 것이다.[22] 이러한 국내의 바람 특성을 바탕으로 고도 12km에서 최대 풍속 60m/s를 갖는 포물선 형태의 서풍으로 바람 모델을 설정하였으며, 고도 24km 이상에서의 바람속도는 0m/s로 가정하였다. 이를 그래프로 나타내면 그림 2.2와 같다.
그림 2.2 바람 프로파일
-60 -50 -40 -30 -20 -10 0 10
0 5 10 15 20 25
velocity(east) (m/s)
height (km)
wind profile
2.3.2 개회로 하중경감 기법 수치 시뮬레이션 (3자유도)
본 연구에서 최적화 기법을 통해 설계된 개회로 하중경감 유도제어기의 성능을 평가하기 위해서 다음과 같이 총 세 가지 시뮬레이션을 수행하였다.
Case I. No wind: 바람이 불지 않는 조건에서 정상피치와 요 명령을 적용하여 비행
Case II. Without load relief (w/o LR): 바람이 부는 조건에서 정상피치와 요 명령을 적용하여 비행
Case III. Using load relief (using LR): 바람이 부는 조건에서 최적화 결과로 얻은 정상피치와 요 명령을 적용하여 비행
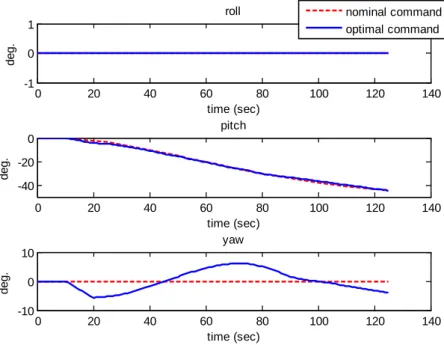
수치 시뮬레이션 결과를 그림 2.3-2.10에 도시하였다. 바람이 없을 경우에 대해 최적화하여 얻은 결과를 정상명령, 고려한 바람에 대해 얻은 최적화 결과를 최적명령이라 정의하였다. 그림 2.3을 살펴보면 피치방향의 자세명령은 정상명령과 비교했을 때 거의 변화가 없는 것을 확인할 수 있다.
최적화에 사용된 바람이 서풍이므로 피치방향으로는 바람이 영향을 주지 않기 때문이다. 반면 요방향의 최적화된 자세각 명령은 정상명령과 확연히 차이를 보인다. 2.1절에서 정의한 좌표계를 따르면 요 각이 양의 값을 지닐 때 서쪽을 바라보고, 음의 값을 지닐 때 동쪽을 바라보는 자세가 된다.
받음각은 바람이 불어오는 방향으로 자세를 취할 때 값이 줄어드는데, 최적화 결과 최대동압 구간인 65초 부근에서 양의 요 각을 가짐으로써 받음각을 줄이는 기동을 하는 것을 확인할 수 있다. 한편, 수직이륙 구간 이후(10초에서 45초)와 최대동압구간 이후(100초에서 125초)에서는 음의 요 각을 갖는데, 이는 최종위치 및 최종속도 구속조건을 만족하기 위한 보상 기동이다. 즉 동압이 크지 않은 구간에서 받음각을 키우더라도 원하는
목표궤도에 오를 수 있도록 자세를 취하는 것이다.
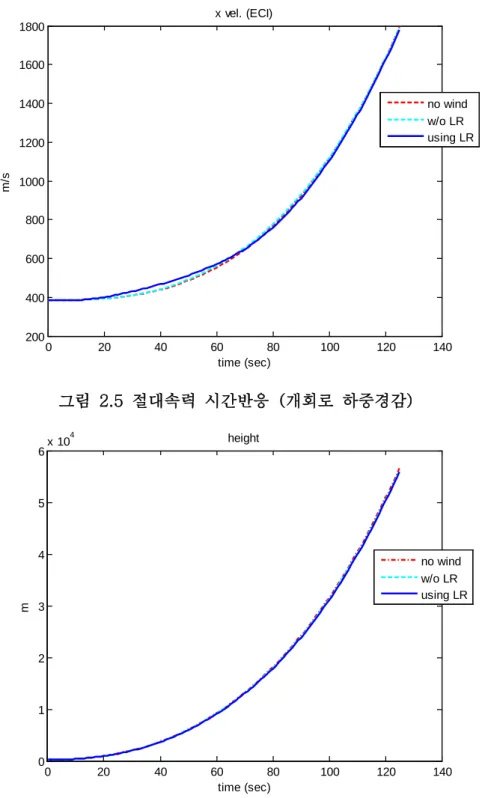
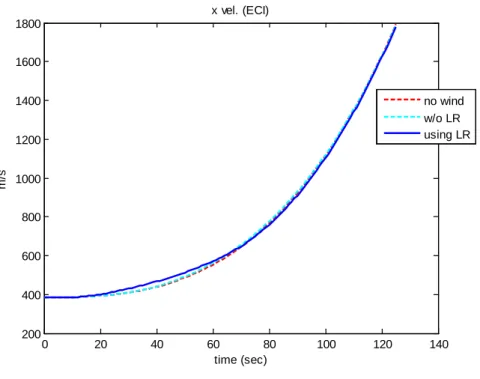
그림 2.4를 살펴보면 바람이 없을 때의 정상궤적과 바람이 있을 때 정상명령을 이용해 비행한 궤적, 그리고 최적명령을 이용해 비행한 궤적이 거의 비슷한 것을 확인할 수 있다. 바람이 비행궤적에는 큰 영향을 미치지 않는다는 뜻이다. 속력 그래프와 고도 그래프를 나타낸 그림 2.5와 2.6을 보아도 이러한 특성을 볼 수 있다. 시뮬레이션을 수행한 세 가지 경우에 대해 궤적의 차이가 거의 없다.
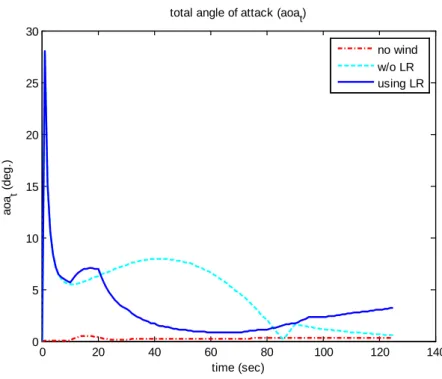
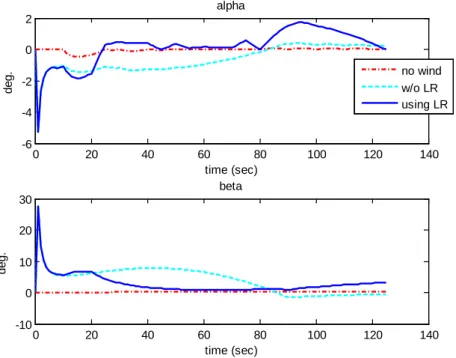
그림 2.7은 받음각과 옆미끄럼각을 나타낸 그래프이다. 시뮬레이션에 이용한 바람은 서풍이기 때문에 받음각에 비해 옆미끄럼각이 훨씬 큰 값을 갖는다. 정상명령을 이용한 경우보다 최대동압 구간에서는 받음각과 옆미끄럼각이 작고, 최대동압 구간 전후로는 그 값이 더 큰 것을 확인할 수 있다. 그림 2.8은 총받음각을 나타낸 것으로 실질적으로 구속조건에 사용되는 변수이며, 서풍만 고려되었으므로 옆미끄럼각과 거의 유사한 결과를 보인다.
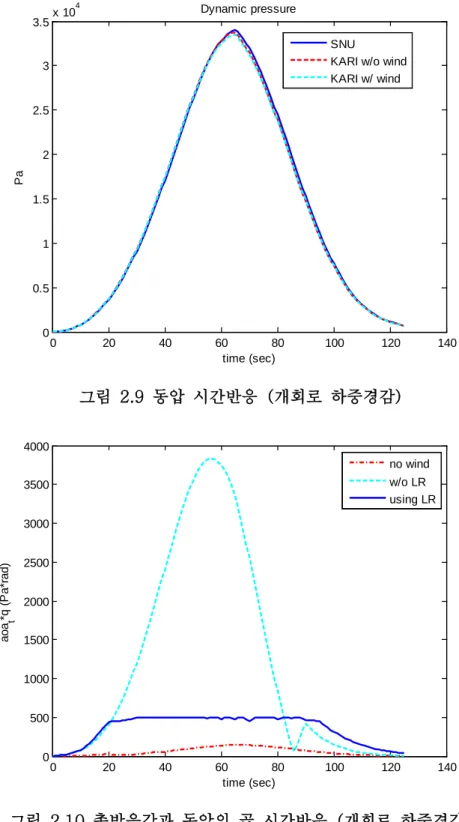
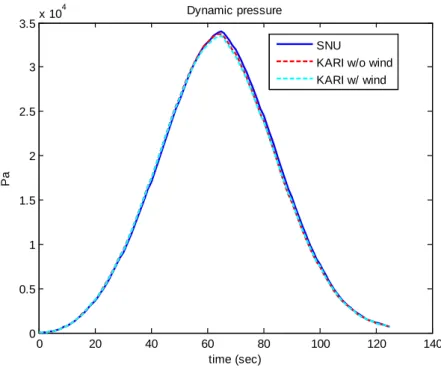
그림 2.9를 살펴보면 세 가지 시뮬레이션 환경에 대해 궤적이 거의 비슷하므로 고도와 속도의 함수인 동압 역시 비슷한 결과를 보인다.
그러나 그림 2.10을 보면 바람이 부는 상황에서 정상명령을 사용하면 총받음각과 동압의 곱이 최대 4,000Pa-rad의 값을 보이는 반면, 최적명령을 사용할 경우 구속조건인 500Pa-rad이 유지되는 것을 확인할 수 있다. 따라서 최적화가 잘 수행되었으며 비행 안정성을 갖는 궤적이 생성된 것을 알 수 있다.
최적화된 결과의 초기질량, 1단 종료위치 및 종료 속도를 표 2.2에 정리하였다. 최적화 성능지수였던 초기질량은 538kg 증가하였으며, 최종위치와 최종속도는 기준궤적과 각각 1km, 10m/s의 차이를 보여 설정한 구속조건을 만족하였다. 따라서 최적화된 궤적이 초기질량을 증가시키면서 정상명령을 사용한 것에 비해 안정적으로 비행하고, 1단 종료위치와 속도에 대한 구속조건을 모두 만족하는 것을 확인할 수 있다.
그림 2.3 오일러각 시간반응 (개회로 하중경감)
그림 2.4 ECI 위치 시간반응 (개회로 하중경감)
0 20 40 60 80 100 120 140
-1 0 1
roll
time (sec)
deg.
nominal command optimal command
0 20 40 60 80 100 120 140
-40 -20 0
pitch
time (sec)
deg.
0 20 40 60 80 100 120 140
-10 0 10
yaw
time (sec)
deg.
0 20 40 60 80 100 120 140
-3300 -3250 -3200
x pos. (ECI)
time (sec)
km
no wind w/o LR using LR
0 20 40 60 80 100 120 140
4160 4180 4200
y pos. (ECI)
time (sec)
km
0 20 40 60 80 100 120 140
3585 3590 3595
z pos. (ECI)
time (sec)
km
그림 2.5 절대속력 시간반응 (개회로 하중경감)
그림 2.6 고도 시간반응 (개회로 하중경감)
0 20 40 60 80 100 120 140
200 400 600 800 1000 1200 1400 1600 1800
x vel. (ECI)
time (sec)
m/s
no wind w/o LR using LR
0 20 40 60 80 100 120 140
0 1 2 3 4 5
6x 104 height
time (sec)
m
no wind w/o LR using LR
그림 2.7 받음각 및 옆미끄럼각 시간반응 (개회로 하중경감)
그림 2.8 총받음각 시간반응 (개회로 하중경감)
0 20 40 60 80 100 120 140
-6 -4 -2 0 2
alpha
time (sec)
deg.
no wind w/o LR using LR
0 20 40 60 80 100 120 140
-10 0 10 20 30
beta
time (sec)
deg.
0 20 40 60 80 100 120 140
0 5 10 15 20 25 30
total angle of attack (aoat)
time (sec) aoa t (deg.)
no wind w/o LR using LR
그림 2.9 동압 시간반응 (개회로 하중경감)
그림 2.10 총받음각과 동압의 곱 시간반응 (개회로 하중경감)
0 20 40 60 80 100 120 140
0 0.5 1 1.5 2 2.5 3
3.5x 104 Dynamic pressure
time (sec)
Pa
SNU
KARI w/o wind KARI w/ wind
0 20 40 60 80 100 120 140
0 500 1000 1500 2000 2500 3000 3500 4000
time (sec) aoa t*q (Pa*rad)
no wind w/o LR using LR
기준궤적 최적화된 궤적 초기질량
(kg) 200,000 200,538 538 최종위치
(m)
(-3,292,652, 4,196,236, 3,587,466)
(-3,292,878, 4,195,802, 3,586,594)
1,000
최종속도 (m/s)
(-1,482.152, 963.794, -287.328)
(-1,474.859, 957.150, -285.695)
10
표 2.2 초기질량, 최종위치, 최종속도 (개회로 하중경감)
nominal optimal
x − x
2.4 몬테카를로 시뮬레이션
전절에서 수행한 최적화 결과는 특정 바람에 대한 최적해이다. 개회로 방식 하중경감의 특성상 발사 전 바람으로 궤적을 생성하는 것이므로 실제 비행할 때 부는 바람은 최적화에 사용된 바람이 아니다. 따라서 변화하는 바람에 대한 설계궤적의 안정성과, 목표위치 및 목표속도에 대한 만족여부를 확인해보아야 한다. 본 논문에서는 이를 위해 몬테카를로 시뮬레이션[23]을 수행하여 변화하는 바람에 대한 강건성을 확인하였다.
제주도 바람의 특성을 이용하여 1,000개의 바람 프로파일을 생성하였으며, 표 2.3에 고도별 바람특성을 정리하였다.
제주 고도 1.5 km 고도 10 km 고도 20 km
평균(m/s) 12.3 62.6 18.7
표준편차 5.4 16.0 5.8
최대(m/s) 24.5 95.9 31.9
최소(m/s) 1.1 30.2 6.9
표 2.3 고도별 바람 특성
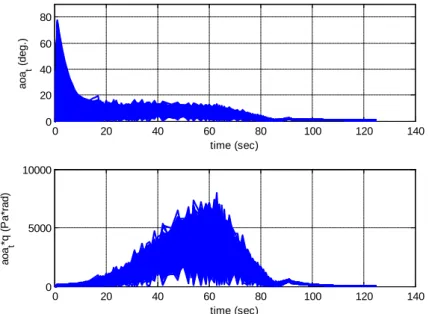
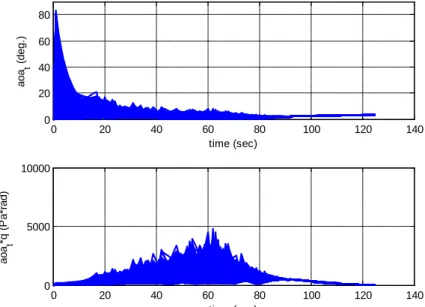
각각의 바람에 대해 정상 자세명령과 최적 자세명령을 이용해 3자유도 시뮬레이션을 수행하였다. 1,000개의 바람 프로파일에 대하여 하중경감 측면에서 중요한 총받음각 및 총받음각과 동압의 곱을 그래프로 나타내었으며, 최종위치, 최종고도, 최종속력, 총받음각과 동압의 곱의 최대값에 대한 통계치들을 표로 정리하였다.
그림 2.11-2.12를 살펴보면 1,000개의 변화하는 바람에 대하여 정상 자세명령을 이용한 경우에 비해 최적 자세명령을 이용하였을 때의 총받음각이 최대동압 구간에서 더 작게 나오는 것을 확인할 수 있다.
이는 바람이 변한다고 하더라도 최대동압 구간에서 여전히 강한 서풍이 불기 때문에 서풍방향으로 자세를 취한 최적자세에서 더 작은 받음각을 갖기 때문으로 생각된다. 이러한 현상은 총받음각과 동압의 곱 그래프에서 그대로 나타나는데, 최적 자세명령에서 총받음각을 줄임으로써 총받음각과 동압의 곱이 정상 자세명령에 비해 훨씬 작은 값을 갖는다. 그러나 최적 자세명령을 사용할 경우에도 총받음각과 동압의 곱이 설계 요구조건인 2,600Pa-rad 보다 커지는 상황이 발생하는 것을 볼 수 있다. 이는 실시간으로 바람에 대처할 수 없는 개회로 방법의 한계라고 생각된다.
그림 2.11 1,000개의 바람에 대한 총받음각 및 총받음각과 동압의 곱 (정상명령)
그림 2.12 1,000개의 바람에 대한 총받음각 및 총받음각과 동압의 곱 (최적명령)
0 20 40 60 80 100 120 140
0 20 40 60 80
time (sec) aoa t (deg.)
0 20 40 60 80 100 120 140
0 5000 10000
time (sec) aoa t*q (Pa*rad)
0 20 40 60 80 100 120 140
0 20 40 60 80
time (sec) aoa t (deg.)
0 20 40 60 80 100 120 140
0 5000 10000
time (sec) aoa t*q (Pa*rad)
표 2.4-2.5를 살펴보면 이러한 특성을 잘 알 수 있다. 1,000개의 바람에 대해 정상 자세명령이나 최적 자세명령 모두 최종위치와 최종고도, 최종속력은 거의 차이가 없다. 바람의 영향이 가장 크게 나타나는 것은 총받음각과 동압의 곱으로, 정상 자세명령의 경우 평균이 대략 5,400Pa-rad으로 요구조건에 비해 훨씬 큰 값을 갖지만, 최적 자세명령의 경우 평균 2,400Pa-rad 정도로 요구조건보다 작은 값을 갖는다. 또한 최적 자세명령의 경우 70백분위수가 약 2,600Pa-rad 이므로 70%의 바람에 대해서는 본 방법이 안전하다는 것을 의미하며, 개회로 방법이 강건성을 지니는 것을 확인할 수 있다. 그러나 최적화에 사용된 바람과 차이가 클 경우 최대 4,800Pa-rad 가까이 커지기도 하므로 비행 중 파손이 발생할 가능성이 존재한다. 따라서 개회로 방법을 사용할 경우, 발사 전에 바람을 계속 측정하면서 발사여부를 결정해야 한다.[7]
평균 표준편차 최대값
최종위치 (m) 6,427,561.5 13.39 6,427,600.7 최종고도 (m) 56,108.6 13.37 56,147.8 최종속력 (m/s) 1,787.0 0.43 1,788.7
t
q
α
최대값(Pa-rad) 5,414.5 637.5 7,952.9 95 백분위수 70 백분위수 목표값 최종위치 (m) 6,427,586.8 6,427,567.6 6428048.3 최종고도 (m) 56,133.9 56,114.7 56,599.7 최종속력 (m/s) 1,787.7 1,787.3 1,790.618
t
q
α
최대값(Pa-rad) 6,568.8 5,703.6 2,600 표 2.4 최종위치, 최종고도, 최종속력, 총받음각과 동압의 곱의 최대값
(정상명령)
평균 표준편차 최대값 최종위치 (m) 6,427,401.4 9.47 6,427,433.4 최종고도 (m) 55,946.1 9.47 55,978.0 최종속력 (m/s) 1,781.2 0.53 1,782.9
t
q
α
최대값(Pa-rad) 2,366.6 562.8 4,769.0 95 백분위수 70 백분위수 목표값 최종위치 (m) 6,427,417.9 6,427,405.5 6428048.3 최종고도 (m) 55,962.5 55,950.2 56,599.7 최종속력 (m/s) 1,782.1 1,781.5 1,790.618
t
q
α
최대값(Pa-rad) 3,383.7 2,621.8 2,600 표 2.5 최종위치, 최종고도, 최종속력, 총받음각과 동압의 곱의 최대값
(최적명령)
3. 폐회로 방식 하중경감 기법
이 장에서는 발사체의 6 자유도 운동을 모델링하고, 받음각과 옆미끄럼각을 줄이기 위한 슬라이딩 모드 기법의 유도 기법에 대해 정리한다. 슬라이딩 모드 기법은 불확실한 항에 대해서도 강건한 성능을 보이는 비선형 제어기법이다. 슬라이딩 모드 기법에 대해 정리한 후에 각속도 명령과 자세 명령을 추종하도록 하기 위해 궤환선형화 기법을 이용하여 제어기를 설계한다.
3.1 발사체의 6자유도 운동 모델링
본 장에서는 발사체의 6자유도 운동을 기반으로 유도 제어기를 설계하고 시뮬레이션을 수행하였다. 발사체 좌표계는 그림 3.1과 같으며.
발사체의 6자유도 운동에 대한 힘과 모멘트를 구해서 뉴턴-오일러 방정식으로 나타내었다.[24]
그림 3.1 발사체와 좌표계
3.1.1 중력에 의한 힘과 모멘트
지구 중력은 발사체의 무게중심인
x
cg에 작용한다고 가정하면 중력에 의한 모멘트는 존재하지 않는다. 발사체는 연료가 급속하게 연소되므로 발사체의 무게중심은 시간에 따라 변하는 값이다. 중력 모델은 WGS-84를 사용하였으며, 중력에 의한 힘과 모멘트는 다음과 같이 표현된다.[25]0
, 0
0
g g
F mg M
= =
(3.1)( ) ( )
{ }
( ) ( )
{ }
( ) ( )
{ }
2 2
2
2 2
/ / / 2 2
2 2
2
1 1.5 / 1 5sin
1 1.5 / 1 5sin
1 1.5 / 3 5sin
ECEF
ECEF b G G ECI ECI ECEF
ECEF
J a r x
r GM y
g C C C J a r
r r
J a r z
r ψ ψ ψ
+ −
= − + −
+ −
(3.2)
여기서
C
b G/, C
G ECI/, C
ECI ECEF/ 는 각각 유도좌표계에서 동체좌표계로변환하는 행렬, 지구중심 관성좌표계에서 유도좌표계로 변환하는 행렬, 지구중심 관성좌표계에서 지구중심 회전좌표계로 변환하는 행렬을 나타낸다.
3.1.2 추력에 의한 힘과 모멘트
추력에 의한 힘은 추력편향에 의해 결정된다. 그림 3.2와 같이 추력편향
δ δ
y,
z 를 각각 y축과 z축으로 (+)모멘트가 생기는 방향으로 정의하였다.그림 3.2 추력
추력편향이 작다고 가정할 때, 추력으로 인한 힘과 모멘트는 다음과 같이 정의된다.
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
2 2
2 2
2 2
1 tan tan
tan
1 tan tan
tan
1 tan tan
y z
t z
y z
z
z
y y
y
T T
F T
T
T T
δ δ
δ δ δ
δ δ δ
δ δ
+ +
= −
+ +
+ ≈ −
+
(3.3)0
c y
t
c z
M l T l T δ δ
=
(3.4)
여기서
δ δ
y,
z는 각각 피치방향과 요방향의 TVC(thrust vector control) 각도이고,l
는 무게중심에서 TVC까지의 거리이다.3.1.3 공력에 의한 힘과 모멘트
그림 3.3 공력
공력에 의한 힘은 발사체의 압력중심에서 작용한다고 할 수 있다.
그림 3.3과 같이 받음각과 옆미끄럼각이 정의될 때 공력에 의한 힘과 모멘트는 다음과 같이 나타낼 수 있다.
D
a Y
N
QAC
F QAC
QAC
β α
β α
−
=
−
(3.5)( )
( )
0
a c N
c Y
M QAC
QAC
α β
α α
α β
= −
−
(3.6)
여기서
Q
는 동압,A
는 기준면적,
α는 압력중심이며,C
D,C
Yβ ,
C
Nα
는 각각 항력계수와 y방향 공력계수, z방향 공력계수이고,
α
,β
는 받음각과 옆미끄럼각이다. 이 중 동압은 다음과 같이 정의된다.1
22
relQ = ρ V
(3.7)
여기서
ρ
는 공기밀도이며,V
rel는 바람에 대한 상대속도를 말한다.
바람에 대한 상대속도는 다음과 같이 표현된다.
( )
/ / , G
rel b G G b b wind
rel
b wind rel
rel i
U V W
V C C V r V
V V
= − Ω× −
= − =
(3.8)여기서
V
b,i는 로켓의 관성속도이고,
V
b는 지면에 대한 로켓의 속도로 모두 동체좌표계로 나타낸 것이다. 받음각과 옆미끄럼각은 다음과 같이 표현된다.
tan
1 rel relW α =
− U
(3.9)1
2 2 2
sin
relrel rel rel
V
U V W
β =
−
+ +
(3.10)
3.1.4 엔진관성에 의한 힘과 모멘트
발사체의 엔진은 질량이 크기 때문에 엔진의 움짐임에 의한 추가적인 힘과 모멘트가 발생하게 된다. 이러한 현상을 TWD(Tail Wagging the Dog) 효과라고 한다.
그림 3.4 엔진관성
그림 3.4와 같이 엔진을 균일한 밀도의 원기둥형태로 가정하면, 원기둥 중심에서의 관성모멘트는 아래의 식으로 구할 수 있다.
2 2
0
1 1
4
R R12
R RI = m r + m h
(3.11)여기서
m
R은 엔진의 질량,r
R은 엔진의 반지름,h
R은 엔진의 높이가 된다. 엔진의 회전은 원기둥의 무게중심이 아니라 로켓과의 연결부위에서 일어나므로, 회전 중심에서의 관성모멘트I
R 은 다음과 같이 구할 수 있다.2
R 0 R R
I = + I m l
(3.12)여기서
l
R 은 엔진의 무게중심과 연결부위 사이의 거리를 나타낸다.이를 이용하여 TWD 현상으로 인한 힘과 모멘트를 구하면 다음과 같이 나타낼 수 있다.
0
twd R R z
R R y
F m l
m l δ δ
= −
(3.13)
0
( )
( )
twd R R R c y
R R R c z
M I m l l I m l l
δ δ
= +
+
(3.14)
3.1.5 휨에 의한 힘과 모멘트
발사체가 측방향으로 힘을 받으면 휨이 발생하고, 이로 인해 받음각과 엔진의 각도가 변하면서 추가적인 힘과 모멘트가 발생한다. 발사체의 탄성운동은 y축 방향과 z축 방향을 분리해서 생각할 수 있다. 대부분의 발사체는 대칭 형상을 가지므로, 한 축의 탄성운동에 대한 식을 정리한 후에 다른 축은 같은 식을 사용하면 된다. 본 논문에서는 z축의 탄성운동을 정리하였다.
발사체를 균일한 빔이라고 가정하면, 1, 2, 3차 모드형상
φ
와 고유진동수ω
는 다음과 같이 나타낼 수 있다.[26]( ) ( ) ( )
( ) ( )
( ) ( )
( ) ( ( ) ( ) )
cos cosh
sinh sin
sinh sin cosh cos
n
n T n T
n T n T
n n n n
l C l l
l l
l l l l
φ γ γ
γ γ
γ γ γ γ
= −
− ⋅
+ + +
(3.15)
2
1 1 1
2
2 2 2
2
3 3 3
1.51 ,
2.5 ,
3.5 ,
T
T
T
EI
l m
EI
l m
EI
l m
γ π ω γ
γ π ω γ
γ π ω γ
= =
= =
= =
(3.16)
식 (3.15)의 모드형상에서 상수 C는 로켓의 가장 밑부분에서 1이 되도록 정규화하는 값으로 설정하였다. 이로 인한 z축 방향의 휨변위
ξ
z는 다음과 같이 나타난다.( ) , ( ) ( )
z z
n n
n
l t l q t
ξ = ∑ φ
(3.17)위 식에서 일반화된 좌표계
q
nz는 다음 식으로부터 얻을 수 있다.2
2z
z z z n
n n n n n n
n
q q q Q
z ω ω M
+ + =
(3.18)여기서
Q
nz, M
n 은 각각 z축에 대한 일반화된 힘과 일반화된 질량으로 다음과 같이 구한다.( )
z
n z n
Q = ∫ ∑ F φ l dl
(3.19)( )
2n n
M = ρ φ ∫ l dl
(3.20) 모드기울기σ
는 모드형상을 미분하여 얻을 수 있으며, 이를 이용해휨 기울기
d
zdl
ξ
를 다음과 같이 구할 수 있다.( )
n( )
n
d l
l dl
σ = − φ
(3.21)( ) ( )
( , )
z
z
n n
n
d l t l q t
dl
ξ = − ∑ σ
(3.22)동일한 방법으로 y축의 탄성운동에 따른 휨으로 인한 추가적인 힘과 모멘트는 다음과 같이 구할 수 있다.
( )
( )
,
, ,
,
0
j
j
station mode
e e y
bd Y bd j R n R n n
j n
station mode
e e z
N bd j R n R n n
j n
F QA C m l q
QA C m l q
β
α
β φ σ
α φ σ
= − −
− + −
∑ ∑
∑ ∑
(3.23)
( ) ( )
( ) ( )
,
, ,
,
0
j
j
station mode mode
e z e z
bd m bd j R R R c n n R c R n n
j n n
station mode mode
e y e y
m bd j R R R c n n R c R n n
j n n
j
j
M QA d C I m l l q m l l q
QAd d C I m l l q m l l q
α
β
α σ φ
β σ φ
= − + + +
− + + +
∑ ∑ ∑
∑ ∑ ∑
(3.24)
여기서
C
Y,j β ,N ,j
C
α 는 각각 j번째 위치에서의 y방향, z방향 공력계수이고,
α
bd j,β
bd j, 는 휨으로 생기는 추가적인 받음각과 옆미끄럼각을 말하며,d
는 무게중심으로부터 j번째 위치까지의 거리를 말한다. 그리고φ
e는엔진의 로켓 연결부위에서의 n차 모드형상을 나타내며,
σ
ne 는 엔진의 로켓연결부위에서 n차 모드기울기를 나타낸다.3.1.6 뉴턴-오일러 방정식과 질량방정식
앞의 3.1.1절에서 3.1.5절까지 정리한 힘과 모멘트를 포함하여 뉴턴- 오일러 방정식으로 나타내면 다음과 같다.
, ,
, ,
, ,
b i
1
b ib i b i g t a twd bd
b i b i
U p U
V q m V F F F F F
W m r W
= − × + + + + +
(3.25)
1
g t a twd bd
p p p
q J q J q M M M M M
r r r
−
= − × + + + + +
(3.26)
여기서
U
b i, ,V
b i, ,W
b i, 는 각각 발사체의 x축, y축, z축 방향의 관성속도이고,p
,q
,r
은 발사체의 x축, y축, z축 방향의 각속도,m
은 발사체의 질량이고, 본 논문에서는 발사체의 1단 비행만을 고려하였으므로 순간적으로 변하는 단분리는 발생하지 않는다고 가정하였다. 질량의 미분방정식은 다음과 같다.0 vac
vac
m T
g Isp
= −
(3.27)여기서
T
vac 는 진공추력,g
0는 지구 표면에서의 중력가속도,Isp
vac는 진공 비추력을 나타낸다.또한,
J
는 관성행렬로 기체축에 대칭형상을 갖는 발사체에 대하여 다음과 같이 표현된다.0 0
0 0 ,
0 0
xx
yy yy zz
zz
I
J I I I
I
= =
(3.28)
3.2 받음각과 옆미끄럼각 제어를 위한 슬라이딩 모드 유도
3.2.1 받음각과 옆미끄럼각의 미분방정식
하중경감을 위한 제어를 수행하려면 받음각과 옆미끄럼각을 0으로 수렴시키기 위한 제어기를 설계해야 한다. 이를 위해 받음각과 옆미끄럼각의 미분방정식을 구하고, 슬라이딩 모드 제어기를 설계하였다.[6,27,28]
받음각은 다음과 같이 표현된다.
tan
1 rel rel rel relrel b w
b b
W U W U
W W W
U U
α
−
=
≈
≈ = −
(3.29)
양 변에
U
b 를 곱하고 시간에 대해 미분한 다음 정리하면, 다음과 같이 나타낼 수 있다.b b w
b b b
U W W
U U U
α = − α + −
(3.30)마찬가지로 옆미끄럼각도 다음과 같이 정리할 수 있다.
1
2 2 2
sin
relrel rel rel
rel rel
rel b w
b b
V
U V W
V U
V V V
U U
β =
−
+ +
≈
≈ = −
(3.31)
b b w
b b b
U V V
U U U
β = − β + −
(3.32)이 때
W
b,V
b는 다음과 같이 근사할 수 있다.,
1 1
b b i
z
b b
z N y b b
W W
F qU pV m
g QAC T qU pV
m
αα m δ
≈
= + −
= − + + −
(3.33)
,
1 1
b b i
y
b b
y Y z b b
V V
F pW rU m
g QAC T pW rU
m
ββ m δ
≈
= + −
= + − + −
(3.34)
식 (3.33)-(3.34)를 식 (3.30)과 식 (3.32)에 각각 대입하여 정리하면 다음과 같다.
1 1 1
1 1 1
b w
z N y b b
b b b
b w
N z y b b
b b b
U W
g QAC T qU pV
U U m m U
U W
QAC g T qU pV
U m U m U
α
α
α α α δ
α δ
= − + − + + − −
= − + + + + − −
(3.35)1 1 1
1 1 1
b w
y Y z b b
b b b
b w
Y y z b b
b b b
U V
g QAC T pW rU
U U m m U
U V
QAC g T pW rU
U m U m U
β
β
β β β δ
β δ
= − + + − + − −
= − − + − + − −
(3.36)3.2.2 슬라이딩 모드 기법을 이용한 각속도 유도 명령 생성
식 (3.35)와 식 (3.36)에 나타낸 받음각과 옆미끄럼각의 미분방정식을 살펴보면, 바람 속도의 미분항
W
w, V
w이 포함되어 있다.그러나 비행 중에 실시간으로 바람에 대한 정보를 알 수 없기 때문에 바람구배인
W
w, V
w를 구할 수 없다. 따라서 본 연구에서는 이 값을 외란으로 생각하고, 슬라이딩 모드 기법을 사용하였다.