저작자표시-비영리-변경금지 2.0 대한민국 이용자는 아래의 조건을 따르는 경우에 한하여 자유롭게
l 이 저작물을 복제, 배포, 전송, 전시, 공연 및 방송할 수 있습니다. 다음과 같은 조건을 따라야 합니다:
l 귀하는, 이 저작물의 재이용이나 배포의 경우, 이 저작물에 적용된 이용허락조건 을 명확하게 나타내어야 합니다.
l 저작권자로부터 별도의 허가를 받으면 이러한 조건들은 적용되지 않습니다.
저작권법에 따른 이용자의 권리는 위의 내용에 의하여 영향을 받지 않습니다. 이것은 이용허락규약(Legal Code)을 이해하기 쉽게 요약한 것입니다.
Disclaimer
저작자표시. 귀하는 원저작자를 표시하여야 합니다.
비영리. 귀하는 이 저작물을 영리 목적으로 이용할 수 없습니다.
변경금지. 귀하는 이 저작물을 개작, 변형 또는 가공할 수 없습니다.
- i -
초 록
휠로더의 대표적인 프런트 링키지 구조에는 지-바 타입(Z-bar type)과 패럴렐 타입(Parallel type) 두 가지 구조가 있다. 지-바 타입은 굴삭력이 매우 좋으나 작업 구간에서 작업부의 각도 변화가 심하다. 반면 패럴렐 타입의 경우 작업부의 각도 변화가 작지만, 실린더의 수축에 의하여 굴삭 작업이 이루어지기 때문에 매우 비효율적이고 굴삭력이 작다. 따라서 두 가지 타입 휠로더의 장점을 동시에 확보할 수 있는 독창적인 프런트 링키지의 개발이 필요하다.
본 논문에서는 지-바 휠로더의 굴삭력을 유지하면서 작업 전 구간에서 작업부의 각도변화가 작은 새로운 휠로더 프런트 링키지 메커니즘을 고안하였다. 또한 새로운 링키지에 대한 기구학 해석을 통해 작업구간에서 작업부의 각도변화를 도출하고, 정역학 해석을 통해 굴삭력을, 동역학 해석을 통하여 작업 구간에서 실린더에 부가되는 반력을 도출한다. 또한 이를 토대로 설계 변수인 핀 포인트의 위치를 가지치기 방식의 완결탐색방법을 통해 최적화 하여, 지-바 수준의 굴삭력을 유지하면서 작업부의 각도변화를 최소화 하였다. 그 결과 굴삭력은 12.6 ton 으로 지-바 타입 수준의 굴삭력(12.7 ton)을 확보하였으며, 작업부의 각도변화는 틸팅(tilting) 시 12.5˚, 노-틸팅(no-tilting) 시 3.4˚로 지-바 타입 대비 각각 38.1 %, 91.3 % 향상되었음을 확인하였다.
주요어 : 휠로더, 병렬 메커니즘, 기구학, 동역학 학 번 : 2010-23237
- ii -
목차
초록 ... ⅰ 목차 ... ⅱ 그림목차 ... ⅲ 표목차 ... ⅴ
1. 서론 ... 1
1.1 연구배경 및 연구동기 ... 1
1.2 관련 연구 조사 ... 3
1.3 연구목표 및 내용 ... 5
2. 휠로더 신규 프런트 링키지 고안 ... 6
3. 기구학 해석 ... 9
4. 역학해석 ... 13
4.1 정역학 해석을 통한 굴삭력 도출 ... 13
4.2 동역학 해석을 통한 실린더 반력 도출... 15
5. 이론해석결과의검증 ... 18
5.1 기구학 해석의 검증... 18
5.2 정역학 해석의 검증... 20
5.2 동역학 해석의 검증... 21
6. 핀 포인트 위치 최적 설계 ... 24
6.1 핀 포인트 위치 최적화 ... 24
6.2 최적화 수행 결과 ... 26
7. 결론 ... 27
8. 참고문헌 ... 28
Abstract ... 29
- iii -
그림 목차
그림 1 지-바(Z-bar) 링키지와 패럴렐(Parallel) 링키지 ... 1
그림 2 휠로더 링키지의 소요 동력 ... 3
그림 3 휠로더의 모델링 ... 4
그림 4 신규 프런트 링키지의 구성 ... 6
그림 5 신규 프런트 링키지의 도식적 형상 ... 7
그림 6 신규 프런트 링키지의 원리 ... 8
그림 7 신규 프런트 링키지의 시제품 제작 모습 ... 8
그림 8 기구학 해석을 위한 신규 프런트 링키지의 변수 ... 9
그림 9 노틸팅과 틸팅 자세에서의 버켓 각도변화 ... 12
그림 10 버켓 각도변화의 비교 ... 12
그림 11 정역학 해석을 위한 신규 프런트 링키지의 변수 ... 13
그림 12 동역학 해석을 위한 신규 프런트 링키지의 변수... 15
그림 13 노틸팅 자세에서 버켓 각도변화 및 오차 ... 19
그림 14 틸팅 자세에서 버켓 각도변화 및 오차 ... 19
그림 15 노틸팅 자세에서 실린더 반력의 이론 값과 시뮬레이션 결과 의 비교 ... 21
그림 16 틸팅 자세에서 실린더 반력의 이론 값과 시뮬레이션 결과의 비교 ... 21
- iv -
그림 17 실제 작업 상황에서 실린더의 구동 속도와 버켓 끝단에 부가
되는 힘 ... 22
그림 18 실제 작업상황에서 실린더에 부가되는 반력 ... 23
그림 19 가지치기 방식의 완결탐색방법의 예 ... 24
그림 20 최적화 수행 결과 ... 26
- v -
표 목차
표 1 버켓 각도변화의 비교 ... 12 표 2 굴삭력의 비교 ... 14 표 3 휠로더 링키지 성능 비교... 27
- 1 -
1. 서론
1.1 연구배경 및 연구동기
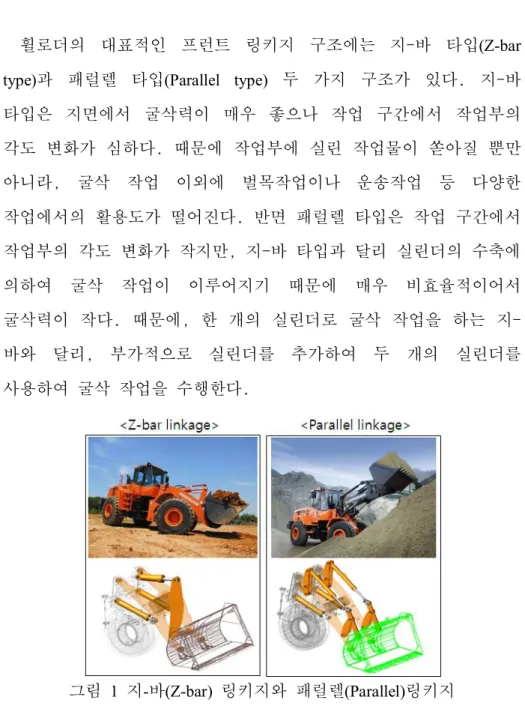
휠로더의 대표적인 프런트 링키지 구조에는 지-바 타입(Z-bar type)과 패럴렐 타입(Parallel type) 두 가지 구조가 있다. 지-바 타입은 지면에서 굴삭력이 매우 좋으나 작업 구간에서 작업부의 각도 변화가 심하다. 때문에 작업부에 실린 작업물이 쏟아질 뿐만 아니라, 굴삭 작업 이외에 벌목작업이나 운송작업 등 다양한 작업에서의 활용도가 떨어진다. 반면 패럴렐 타입은 작업 구간에서 작업부의 각도 변화가 작지만, 지-바 타입과 달리 실린더의 수축에 의하여 굴삭 작업이 이루어지기 때문에 매우 비효율적이어서 굴삭력이 작다. 때문에, 한 개의 실린더로 굴삭 작업을 하는 지- 바와 달리, 부가적으로 실린더를 추가하여 두 개의 실린더를 사용하여 굴삭 작업을 수행한다.
그림 1 지-바(Z-bar) 링키지와 패럴렐(Parallel)링키지
- 2 -
따라서 지-바 타입의 장점인 높은 굴삭력과 패럴렐 타입의 장점인 작업부의 작은 각도변화를 동시에 확보할 수 있는 독창적인 프런트 링키지의 개발이 필요하다.
- 3 -
1.2 관련 연구 조사
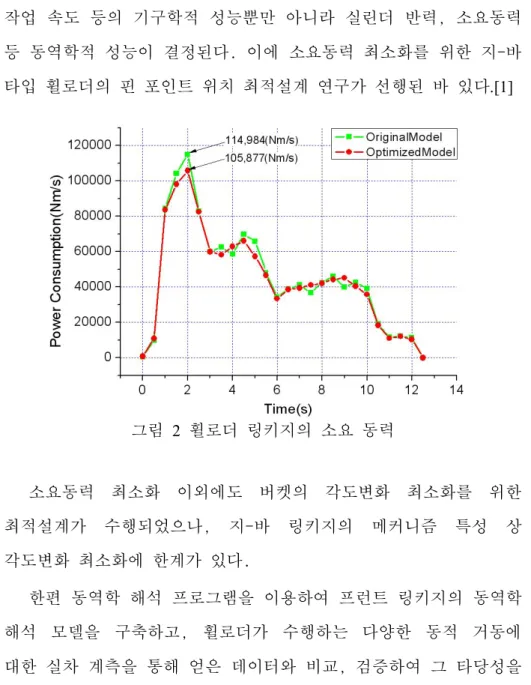
휠로더 프런트 링키지는 핀 포인트 위치에 따라 버켓의 각도변화, 작업 속도 등의 기구학적 성능뿐만 아니라 실린더 반력, 소요동력 등 동역학적 성능이 결정된다. 이에 소요동력 최소화를 위한 지-바 타입 휠로더의 핀 포인트 위치 최적설계 연구가 선행된 바 있다.[1]
그림 2 휠로더 링키지의 소요 동력
소요동력 최소화 이외에도 버켓의 각도변화 최소화를 위한 최적설계가 수행되었으나, 지-바 링키지의 메커니즘 특성 상 각도변화 최소화에 한계가 있다.
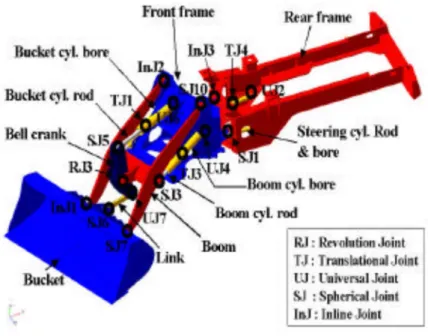
한편 동역학 해석 프로그램을 이용하여 프런트 링키지의 동역학 해석 모델을 구축하고, 휠로더가 수행하는 다양한 동적 거동에 대한 실차 계측을 통해 얻은 데이터와 비교, 검증하여 그 타당성을
- 4 -
검토한 바 있다.[2] 이를 통하여 동역학 해석 프로그램을 이용하여 구축한 동역학 해석 모델의 신뢰성을 확보할 수 있다.
그림 3 휠로더의 모델링
- 5 -
1.3 연구목표 및 내용
본 연구에서는 지-바 휠로더의 굴삭력을 유지하면서 작업 전 구간에서 작업부의 각도변화가 작은 새로운 휠로더 프런트 링키지 메커니즘을 고안하였다. 또한 새로운 휠로더 프런트 링키지 메커니즘에 대한 기구학 해석 및 역학 해석을 수행하였다. 기구학 해석을 통해 작업구간에서 작업부의 각도변화를 도출하고, 정역학 해석을 통해 굴삭력을, 동역학 해석을 통하여 작업 구간에서 실린더에 부가되는 반력을 도출한다. 이를 시제품 제작 및 실험을 통해 기구학 해석 및 역학해석을 검증하여 이론해석의 신뢰성을 확보하였다. 또한 이를 토대로 설계 변수인 핀 포인트의 위치를 가지치기 방식의 완결탐색방법을 통해 최적화 하여, 지-바 수준의 굴삭력을 유지하면서 작업부의 각도변화를 최소화 하였다.
- 6 -
2. 휠로더 신규 프런트 링키지 고안
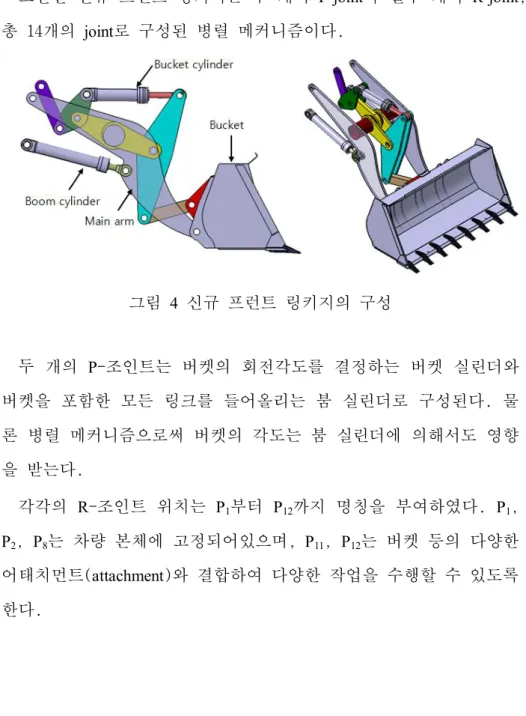
고안한 신규 프런트 링키지는 두 개의 P-joint와 열두 개의 R-joint, 총 14개의 joint로 구성된 병렬 메커니즘이다.
그림 4 신규 프런트 링키지의 구성
두 개의 P-조인트는 버켓의 회전각도를 결정하는 버켓 실린더와 버켓을 포함한 모든 링크를 들어올리는 붐 실린더로 구성된다. 물 론 병렬 메커니즘으로써 버켓의 각도는 붐 실린더에 의해서도 영향 을 받는다.
각각의 R-조인트 위치는 P1부터 P12까지 명칭을 부여하였다. P1, P2, P8는 차량 본체에 고정되어있으며, P11, P12는 버켓 등의 다양한 어태치먼트(attachment)와 결합하여 다양한 작업을 수행할 수 있도록 한다.
- 7 -
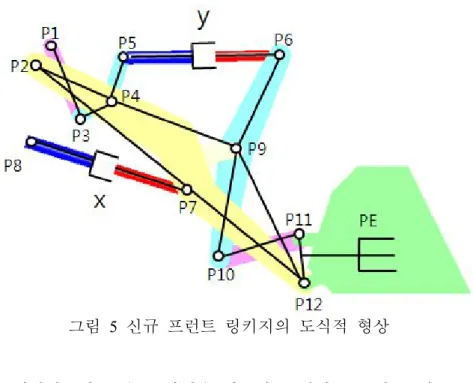
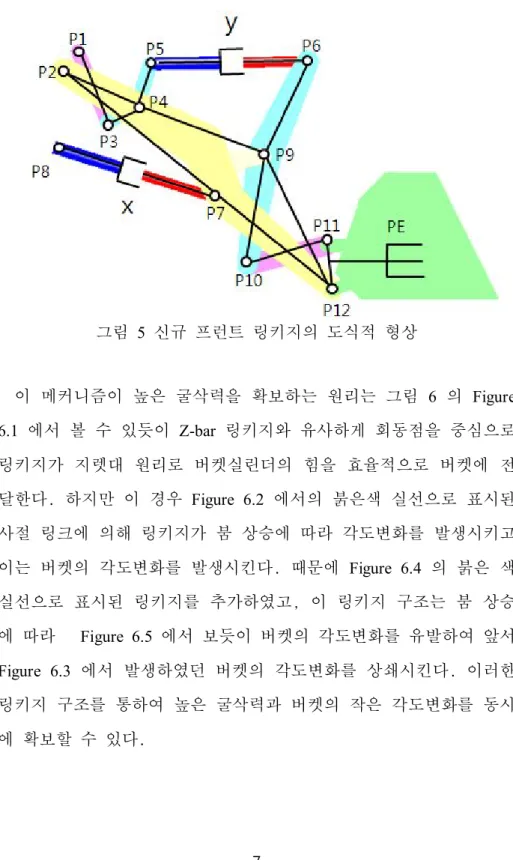
그림 5 신규 프런트 링키지의 도식적 형상
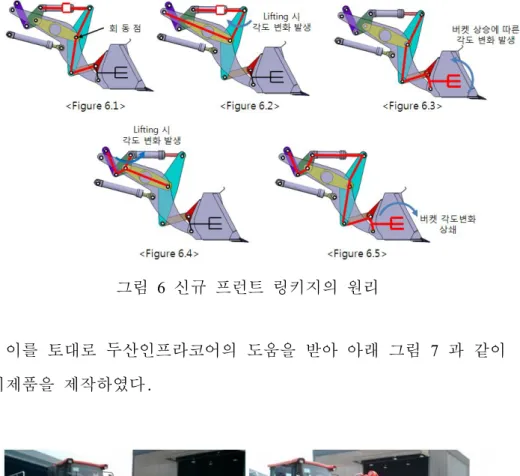
이 메커니즘이 높은 굴삭력을 확보하는 원리는 그림 6 의 Figure 6.1 에서 볼 수 있듯이 Z-bar 링키지와 유사하게 회동점을 중심으로 링키지가 지렛대 원리로 버켓실린더의 힘을 효율적으로 버켓에 전 달한다. 하지만 이 경우 Figure 6.2 에서의 붉은색 실선으로 표시된 사절 링크에 의해 링키지가 붐 상승에 따라 각도변화를 발생시키고 이는 버켓의 각도변화를 발생시킨다. 때문에 Figure 6.4 의 붉은 색 실선으로 표시된 링키지를 추가하였고, 이 링키지 구조는 붐 상승 에 따라 Figure 6.5 에서 보듯이 버켓의 각도변화를 유발하여 앞서
Figure 6.3 에서 발생하였던 버켓의 각도변화를 상쇄시킨다. 이러한
링키지 구조를 통하여 높은 굴삭력과 버켓의 작은 각도변화를 동시 에 확보할 수 있다.
- 8 -
그림 6 신규 프런트 링키지의 원리
이를 토대로 두산인프라코어의 도움을 받아 아래 그림 7 과 같이 시제품을 제작하였다.
그림 7 신규 프런트 링키지의 시제품 제작 모습
- 9 -
3. 기구학 해석
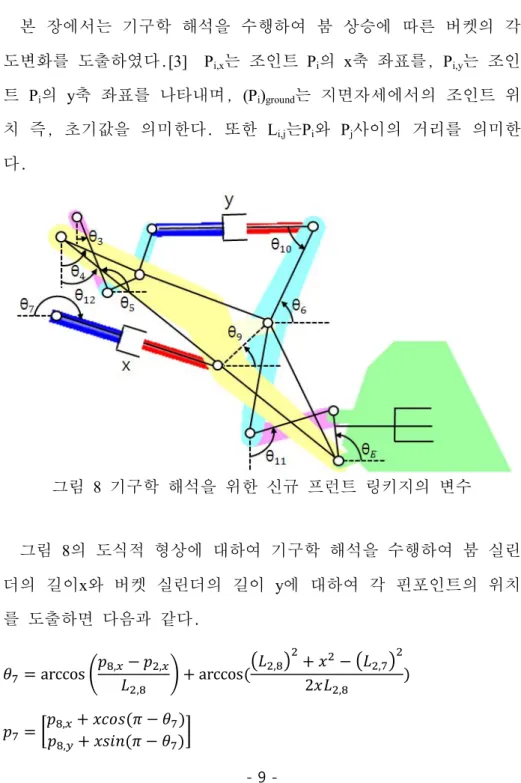
본 장에서는 기구학 해석을 수행하여 붐 상승에 따른 버켓의 각 도변화를 도출하였다.[3] Pi,x는 조인트 Pi의 x축 좌표를, Pi,y는 조인 트 Pi의 y축 좌표를 나타내며, (Pi)ground는 지면자세에서의 조인트 위 치 즉, 초기값을 의미한다. 또한 Li,j는Pi와 Pj사이의 거리를 의미한 다.
그림 8 기구학 해석을 위한 신규 프런트 링키지의 변수
그림 8의 도식적 형상에 대하여 기구학 해석을 수행하여 붐 실린 더의 길이x와 버켓 실린더의 길이 y에 대하여 각 핀포인트의 위치 를 도출하면 다음과 같다.
= arccos , − ,
, + arccos ( , + − ,
2 , )
= , + ( − )
, + ( − )
- 10 -
= arcsin , − ,
, − arccos ( , + , − , 2 , , )
= , + , ( )
, + , ( )
= arccos , − ,
, + arccos ( , + , − , 2 , , )
= , + , (2 − )
, − , (2 − )
= arccos ( , + , − ,
2 , , ) −arccos , − , , = , + , ( )
, − , ( )
= arccos , − ,
, − arccos ( , + , − ,
2 , , )
= , + , ( )
, − , ( )
= arccos , − ,
, + arccos ( , + , − ,
2 , , )
= , + , ( )
, + , ( )
= arccos , − ,
, − arccos ( , + , − , 2 , , )
= , + , ( )
, + , ( )
= arccos , − ,
, + arccos ( , + , − , 2 , , )
- 11 -
= , − , ( )
, − , ( )
= arccos , − ,
, + arccos ( , + , − ,
2 , , )
= , + , ( −2)
, + , ( −2)
따라서 버켓의 무게중심 위치인 PE는 아래와 같이 나타낼 수 있 고,
= arccos , −
, − arccos ( , + , − ,
2 , , )
= , + , ( )
, + , ( )
최종적으로 버켓의 각도변화 φ는 다음과 같다.
= arccos , −
, − arccos (( , ) − ( , )
, )
이 기구학 해석을 토대로 휠로더의 작업상황에서 버켓의 각도변 화 양상을 도출하였다. 휠로더의 작업 상황은 버켓실린더를 구동하 지 않고 지면자세에서 버켓을 그대로 들어올리는 노틸팅(No-tilting) 자세와 버켓실린더를 구동하여 버켓을 일정각도 기울인 후 들어올 리는 틸팅(tilting) 자세가 있다. 이 두 가지 작업 상황에서의 버켓의 각도변화 양상을 도출한 결과는 다음과 같다.
- 12 -
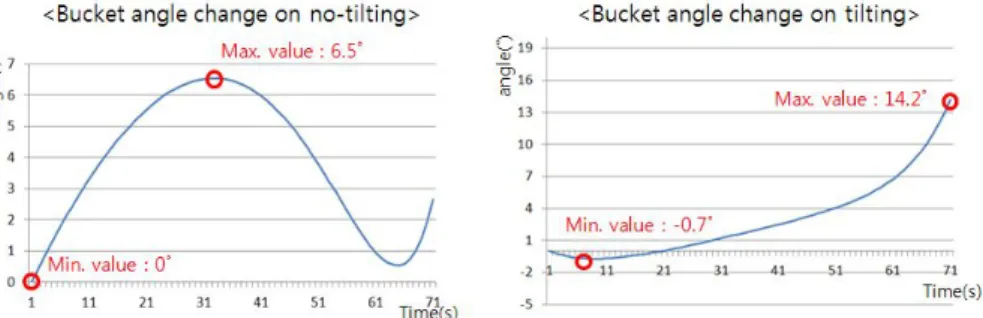
그림 9 노틸팅과 틸팅 자세에서의 버켓 각도변화
No-tilting 자세에서의 경우 버켓의 각도변화가 0˚~ 6.5˚의 각도 변화를 보였고 tilting 자세에서의 경우 -0.7˚~ 14.2˚의 각도변화를 보였다. 이를 Z-bar, Parallel 링키지와 각도변화를 비교한 결과 아래 그림 10과 표 1에서 확인할 수 있듯이 Z-bar의 문제점이었던 버켓의 각도변화를 No-tilting자세에서는 83.3 % tilting자세에서는 26.2 % 향 상시킴을 알 수 있다.
그림 10 버켓 각도변화의 비교 표 1 버켓 각도변화의 비교
Type Angle change
on no-tilting(˚)
Angle change on tilting(˚)
Z-bar 38.9 20.2
Parallel 3 10.1
New linkage 6.5 14.9
- 13 -
4. 역학 해석
4.1 정역학 해석을 통한 굴삭력 도출
굴삭력(Breakout-force)이란 버켓 실린더를 구동하였을 때 버켓의끝 단에서 들어올릴 수 있는 힘으로, 휠로더의 성능을 나타내는 중요 한 지표이다. 이 절에서는 새롭게 고안된 휠로더 프런트 링키지의 정역학 해석을 수행하여 버켓 실린더의 구동에 의한 지면자세에서 의 굴삭력을 도출하였다.
Fbucket는 버켓 실린더가 낼 수 있는 힘으로 실린더 유압 p, 실린더
의 내경d에 대하여 다음과 같이 구할 수 있다.
= × 4 ×
다음으로 정역학 해석을 수행하여 굴삭력 F . . 를 도출한다.
그림 11 정역학 해석을 위한 신규 프런트 링키지 변수
- 14 -
, × sin( ) = , × ′sin ( )
, × F sin = × . .
따라서 굴삭력은 다음과 같다
. . = , × ,
, × ×sin( ) sin
sin = , × ,
, × ×sin( )sin γ sin
× 4 × = 12.4 ton
그 결과 표 2에서 확인할 수 있듯이 Parallel의 문제점이었던 굴삭 력을 5.1 % 향상 시킴을 알 수 있다.
표 2 굴삭력의 비교
Type Break out force(ton)
Z-bar 12.6
Parallel 11.8
New linkage 12.4
- 15 -
4.2 동역학 해석을 통한 실린더 반력 도출
이 절에서는 동역학 해석을 수행하여 다양한 작업 상황에서 버켓 실린더와 붐실린더에 부가되는 반력을 도출하였다.[3] 여기서 한가 지 고려할 사항은 휠로더 버켓에 실리는 작업하중이다. 버켓의 용 량은 2.5 m3이므로 일반적인 흙의 밀도 1800 kg/m3를 고려하면 4500 kg 의 작업하중이 부가된다. 이 작업하중은 프런트 링크들의 무게 대비 매우 큰 수준이므로 작업하중을 고려한 동역학 해석을 수행한 다. 각 링크들에 대하여 뉴턴-오일러 방정식을 적용하면 다음과 같 이 식을 유도할 수 있다. 여기서 , 는 각각 조인트 에 부가 되는 x축 y축 힘을 나타낸다.
그림 12 동역학 해석을 위한 신규 프런트 링키지의 변수
- 16 -
⎝
⎛
0 01 0 , − , , − ,
−1 0
0 10 0
0 −1
, − , , − , ⎠
⎞ ×
⎝
⎛
, , , , ⎠
⎞
=
+ ( , − , ) 00
0
⎝
⎛
0 01 0 , − , , − ,
−1 0
0 10 0
0 −1
, − , , − , ⎠
⎞ ×
⎝
⎛
, , , , ⎠
⎞
=
+ , − , + , ( , − , ) + , ( , − , ) 00
0
⎝
⎜⎛ 1 0
0 1 1 0 , − , , − , 0 1
, − , , − , 0 0 0 0⎠
⎟⎞
×
⎝
⎛
, , , , ⎠
⎞
=
⎝
⎛
, ,
, , − , + , , − ,
0 ⎠
⎞
1,
1, = 3,
3,
- 17 -
⎝
⎜⎛1 0
0 1 1 0 0 1 0 00 0
, − , , − , , − , , − , ⎠
⎟⎞
×
⎝
⎛
, , , , ⎠
⎞
=
⎝
⎛
, + , + , + ,
( , + ) + , + , + ,
+ , − , +
0 ⎠
⎞
여기서,
γ = , , − , + , , − , + , , − , + , , −
, + , , − , + , , − , 을 나타낸다.
따라서 위의 행렬을 풀면 다음과 같이 각 조인트에 부가되는 반 력 , , , 를 도출할 수 있고, 이를 토대로 버켓실린더에 부가되는
반력 F _ 와 붐실린더에 부가되는 반력 F _ 을 다음과 같이
도출할 수 있다.
_ = ( , ) +( , )
=( + , − , + , ( , − , ) + , ( , − , )) ×
, , − , , − , , + , , + , , − , ,
_ = ( , ) +( , )
= ( + , − , + γ) ×
, , − , , − , , + , , + , , − , ,
- 18 -
5. 이론해석 결과의 검증
이 장에서는 시뮬레이션 및 제작한 시제품에 대한 실험을 통하여 앞서 수행한 기구학 및 역학 해석을 검증한다.
5.1 기구학 해석의 검증
이 절에서는 노틸팅(No-tilting)과 틸팅(Tilting) 두 가지 작업 상황에서 버켓의 각도변화를 이론해석과 실험값을 비교하여 검증하였다. 그림 13 은 노틸팅 자세에서의 각도변화를, 그림 14 는 틸팅 자세에서의 각도변화를 나타낸다.
두 가지 작업상황 모두 이론값과 실험값이 유사한 경향성을 보임 을 확인하였고, 실험값을 토대로 3 차원 다항식으로 추세하여 비교 한 결과 노틸팅 자세의 경우 오차 -1.1˚~ 0.72˚에서 신뢰성을 확보하 였고, 틸팅 자세의 경우 오차 -3.3˚~ 0.78˚에서 신뢰성을 확보하였다.
- 19 -
그림 13 노틸팅 자세에서 버켓 각도변화 및 오차
그림 14 틸팅 자세에서 버켓 각도변화 및 오차
- 20 -
5.2 정역학 해석의 검증
앞서 수행한 정역학 해석 결과 아래와 같이 12.4 ton 의 굴삭력을 도출하였고,
F . . =L , × L ,
L , ×L ×sin(θ ) sin θ sin θ
π × d 4 × p
=827 × 353.6 870 × 1080 ×
sin (26) × sin (84.1)
sin (67.5) ×π × 1.6
4 × 200
= 12.4 ton
실제측정결과 11.5 ton의굴삭력을확보하여 7.2 %의 오차를 보였다.
- 21 -
5.3 동역학 해석의 검증
이 절에서는 동역학 해석을 토대로 실제 작업 상황에서 실린더에 부가되는 반력이 실린더의 최대허용하중을 넘는지 검토한다. 앞서 동역학 해석을 수행하여 버켓실린더와 붐실린더에 부가되는 반력을 도출하였고, 이를 동역학 시뮬레이션 툴인 리커다인(recurdyn) 결과와 비교하여 보았다.
그림 15 노틸팅 자세에서 실린더 반력의 이론값과 시뮬레이션 결과의 비교
그림 16 틸팅 자세에서 실린더 반력의 이론값과 시뮬레이션 결과의 비교
그 결과 그림 15 과 그림 16 에서와 같이 노틸팅과 틸팅 두가지 자세에서 붐실린더와 버켓실린더에 부가되는 반력이 시뮬레이션
- 22 -
결과와 일치함을 확인하였고, 이를 통하여 동역학 해석에 대한 신뢰성을 확보하였다.
다음으로 그림 17 에서와 같이 휠로더 운전자가 실제 굴삭작업을 할 때 각 실린더의 구동속도와 그때 버켓 끝단에 걸리는 힘을 측정한 자료를 토대로, 이를 고려한 시뮬레이션을 수행하여 최대 허용하중을 넘는지 검토하였다.
그림 17 실제 작업 상황에서 실린더의 구동속도와 버켓 끝단에 부가되는 힘
- 23 -
그림 18 실제 작업상황에서 실린더에 부가되는 반력
그 결과 그림 18 에서 보듯이 실제 작업상황에서 버켓실린더와 붐실린더 모두 최대 허용하중을 초과하지 않음을 확인하였다.
- 24 -
6. 핀 포인트 (Pin-point) 위치 최적 설계
6.1 핀 포인트 위치 최적화
휠로더의 핀 포인트 위치는 버켓의 각도변화뿐만 아니라 굴삭력을 결정한다. 따라서 exhaustive search method를 응용하여 지-바 수준의 굴삭력을 확보하면서 버켓의 각도변화를 최소화하는 핀 포인트 위치를 도출하였다. 단순히 전사적으로 해를 찾는 exhaustive search
method 를 그대로 적용한다면 탐색해야 할 경우의 수가 매우 많으며
정확도를 높일수록 그 수가 기하급수적으로 증가한다. 이러한 문제를 해결하기 위하여 가지치기 방식의 exhaustive search method를 사용하였다.[1]
그림 19 가지치기 방식의 완결탐색방법의 예
그림19에서 보듯이 초기 핀 포인트 위치를 중심으로 주위 9개의 핀 포인트 위치에 대하여 탐색하고, 그 중 목표함수를 최소화하는 핀 포인트를 선정한다. 선정된 핀 포인트를 중심으로 다시 주위 9
- 25 -
개의 핀 포인트 위치에 대하여 탐색을 수행하는데 이 때 탐색반경 은 반으로 줄여가면서 진행한다.
여기서 목표함수로 노-틸팅 각도변화와 틸팅 각도변화를 선정하 여 1 대 1 의 가중치를 부여하였으며, 제한조건으로 12.4 ton 이상의 굴삭력을 선정하여 지-바 수준의 굴삭력을 확보하면서 각도변화를 최소할 수 있도록 하였다.
- 26 -
6.2 최적화 수행 결과
최적화 수행결과를 시뮬레이션을 통하여 검증한 결과는 다음과 같다. 노-틸팅 자세에서 각도변화는 6.54˚에서 3.4˚로 각도변화가 48 %향상 되었으며 틸팅 자세에서 각도변화는 14.87˚에서 12.47˚
로 16 %향상되었다. 굴삭력 또한 기존12.4 ton에서 12.6 ton으로 1.6 % 향상되었다.
그림 20 최적화 수행 결과
- 27 -
7. 결론
본 논문에서는 새로운 휠로더 프런트 링키지를 고안하고 기구학 해석 및 역학 해석을 수행하여 버켓의 각도변화, 굴삭력, 실린더 반력을 도출하였다. 또한 가지치기방식의 exhaustive search method를 적용하여 일정 수준의 굴삭력을 유지하면서 버켓의 각도변화를 최소화하였다. 그 결과 12.6 ton 의 굴삭력을 확보하면서 노-틸팅 자세에서 3.4˚, 틸팅 자세에서 12.47˚의 각도변화를 갖는 새로운 휠로더 프런트 링키지를 개발하였다. 표 3 에서 볼 수 있듯이 지- 바의 문제점인 버켓의 각도변화와 패럴렐의 문제점인 비효율적인 굴삭력을 모두 해결하였다.
표 3 휠로더 링키지 성능 비교
Type Breakout force(ton) Angle change
on no-tilting(˚)
Angle change on tilting(˚) New
linkage 12.6 3.4 12.47
Z-bar 12.7 38.9 20.2
Parallel 11.8 3 10.1
- 28 -
8. 참고문헌
[1] Kihan Shin. Optimal design of wheel loader front linkage for minimizing power consumption, School of Mechanical and Aerospace Engineering, Seoul national university, 2011
[2] Junyong Park and Wansuk Yoo, Three dimensional modeling and simulation of a wheel loader, KSME, 2004
[3] Richard M.Murray, Zexiang Li and S. Shankar Sastry, A Mathematical Introduction to Robotic manipulation, CRC Press, Inc, 1994.
- 29 -
Abstract
There are two typical type of wheel loader front linkage, Z-bar type and Parallel type. Z-bar type has a high breakout force, but a big angle change of attachment. On the other hand, parallel type has a small angle change of attachment but a low breakout force. So it is needed to develop new front linkage retaining merit of two type of wheel loader
This paper presents to develop the new wheel loader front linkage simultaneously retaining a high breakout force of the Z-bar type level and a small angle change of attachment in a trajectory. Also it is presented to derive a angle change of attachment by kinematic analysis, breakout force by static analysis, and reaction force acted on cylinder by dynamic analysis. In addition, position of pin-point is optimized through branch stretching type exhaustive search method.
As a result, breakout force of new front linkage is 12.6 ton that is similar to Z-bar type. Also angle change of an attachment is 12.5˚in tilting trajectory and 3.4˚in no-tilting trajectory
Keywords : Wheel Loader, Parallel Linkage, Dynamics Analysis, Kinematic Analysis
Students Number :2010-23237