CopyrightⒸ2014 KSAE / 129-33 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2014.22.3.250 Transactions of KSAE, Vol. 22, No. 3, pp.250-256 (2014)
토크 벡터링을 적용한 전기차의 선회 성능 평가에 관한 연구
이 종 현*1)․이 경 하1)․김 일 호1)․정 덕 우1)․허 승 진2)
국민대학교 자동차공학전문대학원1)․국민대학교 자동차공학과2)
A Study of Torque Vectoring Application in Electric Vehicle for Driving Stability Performance Evaluation
JongHyun Yi*1)․Kyungha Lee1)․Ilho Kim1)․Deok-Woo Jeong1)․Seung-Jin Heo2)
1)Graduate School of Automotive Engineering, Kookmin University, Seoul 136-702, Korea
2)Department of Automotive Engineering, Kookmin University, Seoul 136-702, Korea (Received 31 October 2013 / Revised 4 February 2014 / Accepted 3 March 2014)
Abstract : EV(Electric Vehicle) has many benefits such as prevention of global warming and so on. But due to driving source changing from combustion engine to battery and e-motor, new R&D difficulties have arisen which changing of desired vehicle performance and multidisciplinary design constraints by means of strong coupled multi-physics domain problems. Additionally, dynamics performances of EV becomes more important due to increasing customer’s demands and expectations for EV in compare with internal combustion engine vehicle. In this paper suggests model based development platform of EV through integrated simulation environment for improving analyse & design accuracy in order to solve multi-physics problem. This simulation environment is integrated by three following specialized simulation tools IPG CarMaker , AVL Cruise, DYMOLA that adapted to each purpose. Furthermore, control algorithm of TV(Torque Vectoring) system is developed using independent driven e-motor at rear wheels for improving handling performance of EV. TV control algorithm and its improved vehicle performances are evaluated by numerical simulation from standard test methods.
Key words : Electric vehicle(전기차), Integrated simulation environment(통합 해석 환경), Torque vectoring(토크 벡 터링), Driving stability(주행 안정성), Vehicle handling dynamics(차량 선회 역학)
Nomenclature
1) : steering wheel angle , deg
: vehicle longitudinal velocity, m/s
: yaw rate of reference model, deg/s
: yaw rate of vehicle model, deg/s
: yaw acceleration of reference model, deg/s
2
: yaw moment, Nm
*A part of this paper was presented at the KSAE 2013 Annual Conference and Exhibition
*Corresponding author, E-mail: [email protected]
: desired wheel torque, Nm BTV : brake torque vectoring DTV : differential torque vectoring ETV : electric-motor torque vectoring EV : electric vehicle
FBC : feed back control FFC : feed forward control
1. 서 론
자동차는 전 세계적으로 공해 및 지구 온난화 문
제로 인해 기존 화석연료의 사용을 최소화 하고 연
토크 벡터링을 적용한 전기차의 선회 성능 평가에 관한 연구
비를 향상시키려는 연구가 끊임없이 이루어지고 있 다. 특히 전기차(EV)의 경우 구동계 동력원이 엔진 에서 배터리와 모터로 변화하게 되면서 차량 요구 성능 변화 및 기계, 열, 유체, 제어, 전기전자 등 다른 영역의 시스템들이 강하게 연성되어 있는 다중 물 리(Multi-Physics) 문제로 인한 설계 제약 조건의 제 기로 인한 인터페이스(Interface) 문제와 개발 시간 및 비용 측면에서 많은 어려움이 따르게 된다. 이를 위해 유럽에서는 EU-Project의 일환으로 완성차 업 체와 부품업체 및 소프트웨어 업체 사이의 원활한 소통과 모델 공용화를 위한 FMI(Functional Mock-up Interface) 구성 및 이를 위한 표준화 작업 연구 (MODELISA)가 수행되고 있다.
1)이와 더불어 전기차도 기존 내연기관 차량이 제 공하는 구동성능과 승차감 및 핸들링 성능 또한 구 매자의 요구사항 및 기대치에 맞도록 충족 시켜주 어야 하므로 전기차의 차량동역학적 성능은 매우 중요하다고 할 수 있다. 특히, 전기차의 구동원인 모 터를 이용하여 추가적인 구동력을 빠른 응답 특성 으로 인가할 수 있게 됨으로서, 최근 국내외에서는 차량의 자세제어를 통한 선회 성능 향상을 위한 많 은 연구들이 진행되고 있다.
2)본 논문에서는 다중 물리 측면에서의 해석 정확 도를 향상 시키고자 각각의 목적별로 특화된 해석 프로그램을 통합한 시뮬레이션 환경을 구축하여 전 기차의 모델 기반 개발 환경(Model-based develop- ment platform)을 구축하였으며, 전기차의 차량 동역 학적 성능 중, 핸들링 성능을 향상시키고자 토크 벡 터링(Torque Vectoring) 시스템 알고리즘을 구성하 고 시뮬레이션을 통한 성능 평가를 수행하였다.
2. 통합 시뮬레이션 환경 구축을 통한
전기차 모델링2.1 통합 시뮬레이션 환경 구성
전기차 기반의 토크벡터링 시스템 구현을 위해 통합 시뮬레이션 환경을 구축하였다. 샤시 제어 시 스템과 첨단 운전자 지원 시스템 개발에 적합한 IPG Automotive사의 CarMaker를 샤시를 포함한 기본 차 량 모델로 사용하였고, 구동계 모델링과 연비해석 에 널리 쓰이고 있는 AVL사의 Cruise를 전기차의
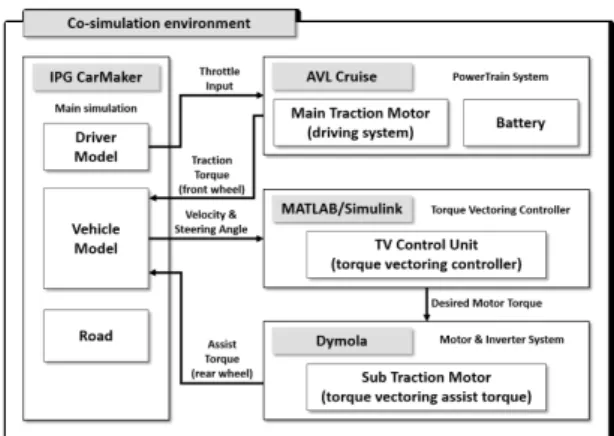
Fig. 1 Integrated simulation environment for EV
파워트레인 모델로 사용하였다. 본 논문에서 핵심 적으로 다루고자 하는 토크 벡터링 시스템 구동을 위한 모터와 인버터 모델링은 다중 물리 시스템 모 델링에 최적화된 DYMOLA를 사용하였고, 토크 벡 터링 알고리즘은 Matlab/ Simulink로 구성하였다. 각 각의 프로그램은 목적에 맞게 서로 통합되고 유기 적으로 연결되어 기능을 수행하게 된다. Fig. 1과 같 이 전체적인 해석은 CarMaker에서 이루어지게 된 다. Cruise에서는 운전자 모델로부터 Throttle 입력을 받아 전륜 구동 전기차의 구동력을 전달하게 된다.
MATLAB/Simulink로 구성된 토크 벡터링 알고리즘 에서는 차량의 상태를 입력으로 받아 기준 모델과 비교하여 토크 벡터링을 구현하기 위해 필요한 모 터 구동력을 계산하게 된다. 이는 Dymola 모터 모델 의 입력이 되어 토크 벡터링 제어에 필요한 구동력 를 차량 모델로 전달해준다. 이러한 방법으로 전륜 구동 전기차를 기반으로 후륜 모터를 제어하는 방 식의 토크 벡터링 시스템을 구현할 수 있게 된다.
이러한 통합 시뮬레이션 환경 구축을 통해 전기 차 설계 변경 시 각각의 소프트웨어에서 제공되는 라이브러리를 변경하여 설계 및 검증이 용이하다는 장점이 있다. 결과적으로, 각 분야의 특화된 소프트 웨어를 이용하기 때문에 컴포넌트 별로 좀 더 정확 한 모델을 구성할 수 있으며, 높은 신뢰성 및 해석 자유도를 갖는 차량모델을 설계할 수 있게 된다.
3-6)2.2 EV 샤시 모델
IPG CarMaker에서 제공되는 기본적인 운전자 모
JongHyun Yi․Kyungha Lee․Ilho Kim․Deok-Woo Jeong․Seung-Jin Heo
델과 주행 환경 구성 이외에 전기차 샤시를 모델링 하였다. 전륜 맥퍼슨, 후륜 멀티링크 타입의 다물체 동역학(Multi-body Dynamics) 기반 서스펜션을 모델 링하기 위해 대상 차종인 중형 세단의 하드포인트 정보와 스테빌라이저바의 강성등을 설정하였고 무 게중심 위치 및 Mass & Inertia 정보등의 기본 차량 제원을 입력하였다.
스프링 강성과 댐퍼의 특성 그리고 부쉬특성과 같은 힘요소 모델링을 위해 각각의 특성 곡선을 부 가적으로 입력한 후 Kinematic & Compliance 해석을 통해 모델 검증을 하였다.
2.3 EV 파워트레인 모델
본 연구에 사용된 전기차의 기본적인 Layout은 Fig. 2와 같다. 전륜은 하나의 주 구동모터로 구동되 고 후륜은 좌우 휠 독립 구동 방식의 토크 벡터링 시 스템 구현을 위해 동일 사양인 두 개의 모터가 장착 되어 있다.
대상 전기차의 주 구동원인 전륜 구동모터와 배 터리는 AVL Cruise로 모델링 하였다. 320V 리튬-이 온 방식 배터리는 충방전 시의 개회로 전압과 SOC(State Of Charge)가 Look-up Table화 되어 있는 일종의 Black-Box 모델링 형식으로 구성되어 있으 며, 모터의 경우도 토크-속도-효율의 특성이 맵 형 식으로 구성되어 있다.
Fig. 2 EV with torque vectoring system layout
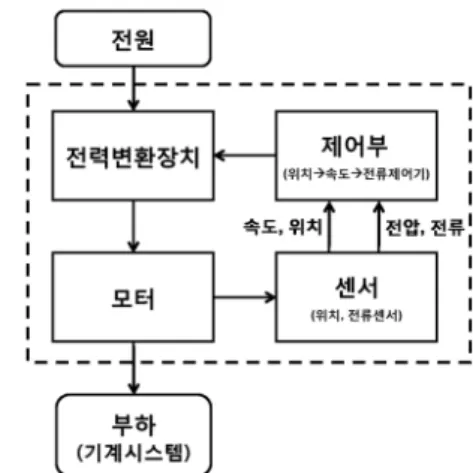
Fig. 3 Motor block diagram
반면에 토크 벡터링 시스템을 위한 후륜 좌우 모 터의 경우에는 다양한 물리적 영역들을 서로 연결 가능하여 다중 물리 시스템 모델링에 높은 신뢰도 를 가진 Modelica 언어 기반의 DYMOLA 소프트웨 어를 사용하였다. 이는 맵 형식 기반이 아닌 모터의 기계적, 전기적 특성에 관한 방정식 및 제어 알고리 즘에 기반한 모델로서 상세 인버터 모델을 포함하 고 있으며 모터 제어의 자세한 부분까지 구현이 가 능한 모델이다. 사용된 모터의 종류는 농형 3상 유 도전동기이며 Fig. 3에 기본적인 전동기의 구동 시 스템을 보여주고 있다.
5-7)전력변환장치에는 공간벡터 전압변조(SVPWM:
Space Vector Pulse Width Modulation) 방식과 스위칭 소자를 모델링하였고 모터 구성 필수 파라메터인 각종 저항 및 Inertia와 고정자, 회전자의 인덕턴스 값 등이 모터부 모델링에 사용되었다. 제어부는 기 본적으로 벡터 제어(FOC: Field Oriented Control) 방 식이 사용되고 교류 전동기의 3상(a, b, c)을 d-q축으 로 변환하는 좌표변환 기능과 위치, 속도, 전류 제어 기 등이 포함되어 있다. 센서부에서는 모터의 전류 와 위치를 모니터링 하게 된다.
8)3. Torque Vectoring 시스템
3.1 Torque Vectoring 시스템 개요토크 벡터링 시스템의 원리는 일반적인 상시 사
륜구동 방식과 비슷하며 차량의 전후륜, 혹은 좌우
륜 각 휠에 주행 상황에 따른 최적의 구동력을 배분
A Study of Torque Vectoring Application in Electric Vehicle for Driving Stability Performance Evaluation
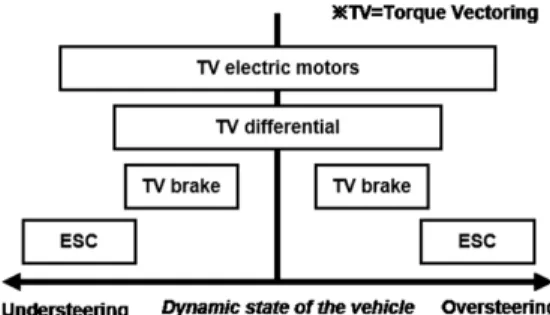
Fig. 4 Torque vectoring range of action compared to ESC
하여 주행 안정성 및 편의성을 제공해주는 시스템 이다. 본 논문에서는 전후륜 구동력 배분은 고려하 지 않고 후륜에 장착된 독립 구동식 모터를 제어하 여 발생되는 요 모멘트를 통해 기본적인 차량의 핸 들링 특성 향상에만 초점을 맞추었다.
토크 벡터링 시스템의 방식으로는 차동기어 박스 내부의 클러치 제어를 하는 디퍼렌셜 방식(DTV)과 좌우 제동력 배분으로 요 모멘트를 생성하는 브레 이크 방식(BTV), 그리고 본 논문에서 사용된 전기 모터의 구동력 배분을 이용한 전기모터 방식(ETV) 등이 쓰이고 있다. 이 방식은 Fig. 4와 같이 기타 다른 방식 및 ESC에 비해 여러 가지 장점을 가지고 있다.
구동력을 직접 제어하므로 브레이크 방식에 비해 미세한 언더스티어/오버스티어 영역을 포함한 제어 가 가능하며, 모터 자체의 큰 구동 토크로 인해 디퍼 렌셜 방식보다 넓은 제어 범위를 가질 뿐만 아니라 100% 좌우 독립 제어가 가능하다. 또한 기본적으로 모터의 빠른 응답특성을 활용할 수 있다. 반면 모터 를 정밀하게 제어해야 하며 오류 시 주행 안정성 저 하 및 운전자의 이질감을 유발할 수 있으므로 정밀 한 모터 제어 알고리즘이 필수적이다.
9)3.2 Torque Vectoring 제어 컨셉
토크 벡터링 알고리즘의 기본 컨셉은 운전자의 주행의도에 의해 차량에 입력된 신호를 바탕으로 제어기에서 주행상황을 판단하고 안정성 유지 및 민첩성 향상을 위하여 부가적으로 요구되는 요 모 멘트를 생성하기 위한 좌우 휠의 구동 토크 차이를 만들어 주는 개념이다. 본 논문에서는 Fig. 5와 같이 단순한 요 모멘트 제어기를 기반으로 토크벡터링 시스템을 구현하였다. 실제 차량 모델로부터 조향
Fig. 5 Control system structure for torque vectoring
각 와 종방향 속도
를 입력신호로 사용하여 기준 차량 모델에서 식 (1), (2)의 요구되는 기준 요 각가 속도
와 요 각속도
를 계산하게 된다.
(1)
·
(2)
이후 기준 모델로부터 계산된 요 각속도와 실제 차량의 요 각속도
를 비교하여 현재 차량의 상 태, 즉 언더/오버스티어 정도를 식 (3)과 같이 판단 해 주어야 한다. 또한 제어 개입 시점과 개입되는 토 크의 양을 정확히 계산하여 좌우 휠에 적절한 모터 토크를 발생 시켜 목표 요 모멘트 값에 도달 할 수 있도록 FBC(Feed Back Controller)를 통해 제어량을 산출하였다.
i f
i f
(3)
요 각속도를 이용한 FBC을 통해 실시간으로 변 하는 제어 오차를 감소시킬 수 있으나, 제어기는 외 란에 의한 목표 제어량의 변화를 검출하여 그 차이 만큼을 보상하도록 동작하기 때문에 응답이 지연될 수 있는 단점이 있다. 이를 방지하기 위해 요 각가속 도를 이용한 FFC(Feed Forward Controller)를 추가적 으로 설계하였다. FFC의 제어 개입 시점을 위한 조 건은 식 (4)와 같다.
i f · i f ·
(4)
이종현․이경하․김일호․정덕우․허승진
FFC는 제어량의 변화를 미리 예측하여 제어 입력 을 실행시키게 되므로 응답성을 향상시킬 수 있다.
따라서, 실제 차량의 요 각속도
의 변화량 즉, 요 각 가속도
가 기준 값 이상이 되면 제어기는 급격한 선 회상황으로 판단하여 제어량을 산출하게 된다. 이로 써 FBC의 단점인 시간 지연을 보상하게 되어 응답성 을 만족하는 토크 벡터링 제어기를 설계하였다.
9,10)4. Torque Vectoring 시스템의 선회성능 평가 후륜 모터 제어를 이용한 토크 벡터링 시스템이 장착된 전기차의 선회 성능을 평가하기 위해 다음 절부터 설명될 여러 주행 시험 기준을 사용하였다.
평가 시, ESC 등과의 협조제어는 고려하지 않았으 며 오직 토크 벡터링 적용 시 차량 선회 성능 측면에 서 얻을 수 있는 이점과 평가 방법 및 항목에 초점을 맞추었다. 사용된 차량 모델은 중형세단으로 제원 은 Table 1과 같다.
Table 1 Parameters of the vehicle model
1572 mass of vehicle [kg]
2454 moment of inertia around vertical axis [kgm2]
1.344 distance front axle to C.G [m]
1.446 distance rear axle to C.G [m]
1.576 width of the front axle [m]
1.564 width of the rear axle [m]
600 maximal torque of a rear electric motor [Nm]
1.0 road friction coefficient [-]
4.1 정상원 선회 시뮬레이션
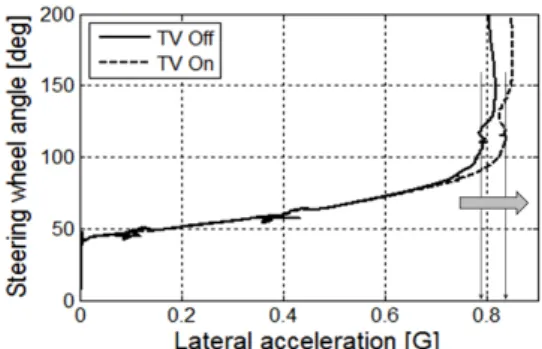
차량의 고유조향 특성 및 한계 횡가속도를 판단 하기 위해 ISO 4138 기준에 의거한 반경 50m 조건에 서 정상원 선회 시뮬레이션을 수행하였다.
Fig. 6은 전 구간에서 차량의 횡방향 가속도와 조 향각을 도시한 그래프이다. 차량의 과소조향계수 (Understeer Gradient)는 유지되는 반면 토크 벡터링 이 적용된 차량의 경우 안정성 한계점(Stability Limit) 부근에서 후륜의 구동 토크 배분으로 인해 한 계 선회속도가 증가하여 결과적으로 최대 0.03G 정 도 향상된 한계 횡가속도 성능을 발휘하게 되는 것 을 확인하였다.
Fig. 6 Steady-state cornering simulation result
4.2 J-Turn 시뮬레이션
ISO 7401 기준에 의한 J-Turn 시뮬레이션 수행 결 과 Fig. 7과 같이 토크 벡터링이 적용 시, 기존 차량 에 비해 선회 시 약 10%의 요 각속도 오버슈트 감소 와 10% 빠른 Peak response time으로 인한 차량의 응 답 특성 향상 및 Yaw damping이 저감 되는 것을 확 인 할 수 있다. 또한 TB Factor
11)도 약 13% 감소하게 되어 차량의 민첩성과 선회 안정성이 향상이 되었 음을 검증하였다.
Fig. 7 J-Turn simulation result
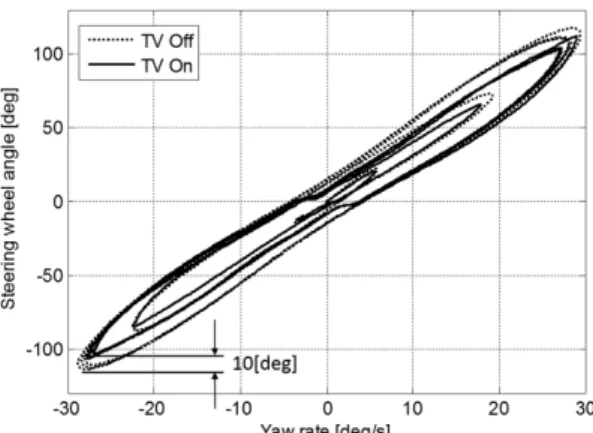
4.3 Slalom 시뮬레이션
50kph의 차속으로 18m의 등 간격 Cone 사이를 운 전자가 통과하는 Slalom 시뮬레이션을 수행하였다.
Fig. 8은 시뮬레이션 전 구간에서의 요 각속도와 조
향각을 표시한 그래프로서 조향각의 좌우 최대값이
약 10deg 저감되어 토크 벡터링 제어를 통해 운전자
의 Steering effort를 줄여주며 약 1 ~ 2kph 빠른 평균
속도로 Cone 사이를 주파 하여 민첩성이 향상되는
것을 확인하였다.
토크 벡터링을 적용한 전기차의 선회 성능 평가에 관한 연구
Fig. 8 Steering wheel angle vs. yaw rate result at slalom simulation
4.4 Sine with Dwell 시뮬레이션
FMVSS 126 기준에 의거한 Sine with Dwell 시뮬 레이션을 수행하였다. 조향 입력 조건은 Fig. 9에 표 시되어 있으며 차속은 80kph로 하였다. 조향 입력 주기는 0.7Hz로 하여 좌우 120도를 입력 조건으로 설정하였고, 3/4 Cycle에서 500ms 동안의 Dwell 구 간에서 최대 요 각속도의 발생 정도로 차량의 안정 성을 판단하였다.
시뮬레이션 결과 Fig. 10, 11에서 보여지는 바와 같이 Dwell 구간에서의 요 각속도 및 차체 미끄럼각 (Body side slip angle)이 큰 폭으로 감소하게 되어 차 량의 선회 안정성이 향상됨을 확인 할 수 있었다.
Fig. 12에는 전 구간에서의 차량 궤적을 나타내었으 며 토크 벡터링이 적용된 차량의 경우가 보다 언더 스티어 경향을 띄게 되어 운전자의 과도한 조향 입 력에도 차량의 횡방향 미끄러짐(Spin-out) 현상이 덜 발생하게 됨을 알 수 있다.
Fig. 9 Steering wheel angle input at sine with dwell test
Fig. 10 Yaw rate result at sine with dwell simulation
Fig. 11 Body side slip angle result at sine with dwell simulation
Fig. 12 Vehicle trajectory at sine with dwell simulation
5. 결 론
본 논문은 통합 시뮬레이션 환경을 구축하여 전 기차를 보다 효율적으로 모델링 하였고 토크 벡터 링 적용으로 전기차의 핸들링 성능 향상을 검증하 였다.
1) 전기차 모델링 시 해석 및 설계의 정확도를 향상
시키기 위해 각각의 목적별로 특화된 해석 프로
그램을 통합한 시뮬레이션 환경을 구축하였다.
JongHyun Yi․Kyungha Lee․Ilho Kim․Deok-Woo Jeong․Seung-Jin Heo
2) 특히 토크 벡터링의 입력으로 사용된 후륜 전기 모터의 경우 다중 물리 문제에 적합한 DYMOLA 를 사용하여 모터 제어의 상세 기능을 구현하였다.
3) 전기차의 토크 벡터링 알고리즘을 구현하여 여 러 시뮬레이션 조건에 대해 핸들링 성능 향상이 되었음을 검증하였다.
후 기
본 연구는 AVL과 IPG의 UPP(University Partnership Program) 지원과 미래창조과학부 및 정보통신산업 진흥원의 IT융합 고급인력과정 지원사업의 연구결 과로 수행되었으며 이에 감사드립니다. (NIPA-2013- H0401-13-1008)
References
1) Modelica Association, Torsten Blochwitz, http://www.fmi-standard.org, 2013.
2) M. Graf, F. Wiesbeck and M. Lienkamp, Vehicle Dynamics Design of the Electric Car Mute, ATZ Worldwide Magazine, Vol.113, pp.10-14, 2011.
3) IPG CarMaker Reference Manual Ver.4.0.3.,
IPG Automotive, 2012.
4) AVL Cruise Users Guide Ver.2011.2, AVL, 2011.
5) DYMOLA User Manual Vol.1 and 2, Dassault Systèmes AB, 2012.
6) DYMOLA Smart Electric Drives Library Users Guide Ver.1.0.0., Modelica Association, 2006.
7) J. H. Shin, D. W. Jeong, J. H. Yi and S.-J. Heo,
“Modeling of Electric Vehicle Platform using Dymola,” KSAE Spring Conference Procee- dings, pp.1747-1752, 2013.
8) S. H. Kim, DC, AC, BLDC Motor Control, Bogdoo Publishing, Seoul, 2011.
9) P. van Vliet, “Torque Vectoring for Improved Vehicle Dynamics,” Vehicle Dynamics Expo, 2010.
10) G. Kaiser, F. Holzmann, B. Chretien and M.
Korte, “Torque Vectoring with a Feedback and Feed forward Controller-applied to a through the Road Hybrid Electric Vehicle,” IEEE Intelligent Vehicle Symposium, pp.448-453, 2011.
11) B. Y. Park and S.-J. Heo, Vehicle Dynamics an Introduction, Munundang, Seoul, 2001.