CopyrightⒸ2016 KSAE / 142-05 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2016.24.3.294 Transactions of KSAE, Vol. 24, No. 3, pp.294-301 (2016)
실차 주행 조건을 고려한 인휠 차량 거동 해석 및 동력 시험계 부하 토크 인가를 위한 구동 모터의 동적 부하 도출시스템 개발
손 승 완1)․김 기 영1)․차 석 원1)․임 원 식2)․김 정 윤*3)
서울대학교 기계항공공학부1)․서울과학기술대학교 자동차공학과2)․대구가톨릭대학교 기계자동차공학부3)
Dynamic Performance Analyzing of In-wheel Vehicle considering the Real Driving Conditions and Development of Derivation System for Applying
Dynamometer Using Drive Motor’s Dynamic Load Torque
Seungwan Son1)․Kiyoung Kim1)․Suk Won Cha1)․Won Sik Lim2)․Jungyun Kim*3)
1)Department of Mechanical & Aerospace Engineering, Seoul National University, Seoul 08826, Korea
2)Department of Mechanical and Automotive Engineering, Seoul National University of Science and Technology, Seoul 01811, Korea
3)Mechanical and Automotive Engineering, Catholic University of Daegu, Gyeongbuk 38430, Korea (Received 22 September 2015 / Revised 17 January 2016 / Accepted 21 February 2016)
Abstract : This paper discusses about analyzing in-wheel vehicle’s dynamic motion and load torque. Since in-wheel vehicle controls each left and right driving wheels, it is dangerous if vehicle’s wheels are not in a cooperative control.
First, this study builds the main wheel control logic using PID control theory and evaluates the stability. Using Carsim-Matlab/Simulink, vehicle dynamic motion is simulated in virtual 3D driving road. Through this, in-wheel vehicle’s driving performance can be analyzed. The target vehicle is a rear-wheel drive in D-class sedan. Second, by using the first In-wheel vehicle’s performance results, it derivate the drive motor’s dynamic load torque for applying the dynamometer. Extracted load torque impute to dynamometer’s load motor, linear experiment in dynamometer can replicated the 3-D road driving status. Also it, will be able to evaluate the more accurate performance analysis and stability, as a previous step of actual vehicle experiment.
Key words : Inwheel(인휠), Carsim(카심), Driving performance(주행 성능), Load torque(부하 토크), Dynamo- meter(동력 시험계)
Nomenclature
1) : total velocity at c.g. of vehicle,
: turn radius of vehicle or radius of raod,
: force,
: acceleration,
: total mass of vehicle,
*A part of this paper was presented at the KSAE 2015 Spring Confernece
*Corresponding author, E-mail: [email protected]
: longitudinal distance from c.g.,
: cornering stiffness of front tire
: cornering stiffness of rear tire
: steering wheel angle,
: moment of inertia, ⋅
: yaw angle of vehicle,
: yaw rate of vehicle,
: yaw angular acceleration of vehicle,
: air resistance coefficient
실차 주행 조건을 고려한 인휠 차량 거동 해석 및 동력 시험계 부하 토크 인가를 위한 구동 모터의 동적 부하 도출시스템 개발
: frontal area,
: gravity,
: air density,
Subscripts l, r : left, right
fl, fr, rl, rr : front left, front right, rear left, rear right x, y, z : longitudinal, lateral, vertical
w : width des : desired
1. 서 론
지구 온난화 문제 및 화석연료의 고갈로 친환경 자동차에 대한 연구 및 개발이 활발히 이루어지고 있다. 친환경 자동차로는 하이브리드 자동차, 연료 전지 자동차, 전기 자동차 등이 있으며 하이브리드 자동차의 경우 보급이 많이 이루어지고 있는 추세 이며 전기자동차의 파워트레인에 관한 연구도 활발 히 진행 중이다.
친환경 자동차의 파워트레인 개발에 있어서 실차 수준의 동작환경에 대한 분석은 매우 중요하다. 전 기 자동차의 경우 최근까지 전기자동차 전용 구동 성능시뮬레이터의 경우 하이브리드 자동차용 구동 성능시뮬레이터를 사용하여 동력성능을 해석하거 나, 최근에 개발 및 연구되기 시작하는 추세이다.
1-3)하지만 인휠 전기자동차의 경우에는 기존의 하이브 리드 자동차와는 달리 각 구동륜에 구동모터가 장 착되므로 구동륜에 작용하는 차량부하가 차동장치 등을 가지는 인라인 타입의 동력 전달계와는 다른 형태를 가지므로 별도의 구동 성능 시뮬레이터 플 랫폼의 개발이 필요하다.
4)일반적으로 차량의 조향 운동은 동력 시험계에서 는 구현할 수 없고, 실차 상태에서 주행하며 성능을 평가하게 된다. 그러나 인휠 자동차는 좌우 구동륜 을 전자제어하기 때문에 실차 실험에서의 작동 신 뢰성에 대한 염려로 인해 조향 시험을 쉽게 하기 어 려운 측면이 있다. 인휠 차량의 조향시험을 동력 시 험계에서 테스트하기 위해서는 실차 조향시 작용하 는 차량의 관성 부하 토크를 좌우 부하 모터를 통해
구현해 주게 되는데, 그 부하 토크들의 값이 실차 주 행에서의 값과 비슷해야만 시험 평가에 의미가 있 다고 할 수 있다.
이 논문에서는 대상차량을 후륜구동 차량으로 설 정하고 PID(Proportional Integral Derivative) 제어 이 론을 이용하여 주요 인휠 제어 로직을 구축하고 작 동 안정성을 평가하게 된다. 사용 프로그램으로는 Carsim/Simulink를 이용하며, 다양한 도로의 차량의 거동 해석 및 동적 성능을 분석하였다. Carsim의 경 우 차량 동역학 모델을 기반으로 한 차량의 거동을 분석하는 상용 시뮬레이션 프로그램이다.
5)이를 활 용하여 각 도로에서 나타나는 동적 부하 값을 얻어 낸다.
2. 인휠 차량 구동 특성 분석 및
제어로직 설계인휠 실차를 제작하여 실험하기에는 시간과 비용 이 많이 소모되며, 적당한 모터의 선정 및 안정성을 확보하기가 어렵기 때문에 시뮬레이션을 먼저 진행 한다. 인휠 차량의 경우 좌・우 바퀴에 동력원인 모 터가 들어가게 되므로, 직진 운동을 할 때의 구동성 능도 중요하지만 차량의 특성상 선회할 때의 바퀴 의 구동성능이 매우 중요하다. 일반적인 하이브리 드 및 전기자동차 시뮬레이터의 경우 모터의 직진 구동성능은 시험 및 평가가 가능하지만, 선회 운동 의 구동성능은 평가 불가능하다.
이번 연구에서는 먼저 차량시스템 성능예측 및 초기 설계용 시뮬레이션 기술을 개발하게 된다. 인 휠 자동차를 모델링하고, 제어로직을 개발하여 개 발된 시뮬레이터를 통해 인휠 차량의 직진 및 선회 시의 구동성능을 평가하게 된다. 이를 통해 동력 시 험계에서 구현할 좌우 모터의 각각의 부하토크를 도출하게 된다.
2.1 대상 차량 및 환경
이번 연구에서는 인휠차량의 차량 시스템 성능
예측 및 시뮬레이션을 개발하는 것이 목적이다. 차
량 제원의 경우 Carsim 프로그램에 있는 후륜구동
형 D-Class 세단을 사용하였으며 차량의 구성 및 세
부 사항은 다음과 같다.
Seungwan Son․Kiyoung Kim․Suk Won Cha․Won Sik Lim․Jungyun Kim
Fig. 1 Vehicle components
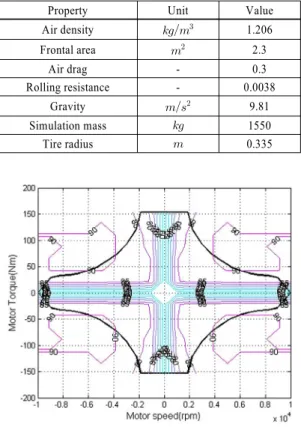
Table 1 Constants for simulation
Property Unit Value
Air density 1.206
Frontal area 2.3
Air drag - 0.3
Rolling resistance - 0.0038
Gravity 9.81
Simulation mass 1550
Tire radius 0.335
Fig. 2 Motor specification
대상 차량의 경우 후륜 구동 인휠 차량이며, 후륜 에 들어간 모터의 최대토크는 153.6 Nm, 최대 속도 는 9998.1 rpm이며 성능 곡선의 경우 Fig. 2와 같다.
차량 배터리의 경우 배터리 용량은 50 Ah이며 배 터리는 다음 그림과 같은 내부저항 모델을 사용한 다. 이 모델에서 배터리의 내부저항과 open circuit voltage는 그림과 같이 배터리 SOC(State Of Charge) 의 함수로 표현된다. 주행 사이클로부터 모터에 필 요한 파워가 결정되면 배터리는 그 만큼의 파워를 모터에 제공해 주게 된다. SOC에 따른 배터리의 전
Fig. 3 Battery specification
Fig. 4 Driver’s pedalling signal
압, 저항 값은 Fig. 3과 같다.
운전자 모듈은 주행 과정에서 페달 신호를 생성 하는 것이다. 다음 그림과 같이 현재 속도가 요구 속 도보다 작으면 가속 신호를 생성하고 반대인 경우 에는 감속 신호를 생성하며 Fig. 4와 같다.
2.2 PID 제어 로직6-8)
시뮬레이터를 개발하는데 있어, 차량 작동 오류 및 안정성 확보를 위해 PID 제어 로직을 사용하였 다. 차량 yaw rate 측정 값 분석을 통한 PID 기반 차 량 안전 제어 로직의 경우 아래 식을 바탕으로 운전 자의 조향 명령과 차량 속도를 바탕으로 한 운전자 요구 yaw rate 값이 계산되게 된다.
(1)
차량 횡 방향 가속도 분석을 통한 PID 기반 차량
Dynamic Performance Analyzing of In-wheel Vehicle considering the Real Driving Conditions and Development of Derivation System for Applying Dynamometer Using Drive Motor’s Dynamic Load Torque
Fig. 5 Vehicle dynamic model
안전 제어 로직의 경우 아래 식을 바탕으로 운전자 의 조향 명령과 차량 속도를 바탕으로 한 운전자 요 구 횡 방향 가속도 값을 계산하게 된다.
(2)
또한 다음과 같은 차량 동역학 수식을 바탕으로 PID 제어 로직을 설계하게 된다.
cos
sin (3)
sin
cos (4)
sin
cos
cos
sin
시뮬레이터에서는 차량 입력 데이터 및 운전자 요구 조건을 반영한 차량 목표 선회 속도 및 가속도 를 계산하고, 계산된 데이터 및 차량 데이터를 비교 해 PID 제어를 하게 된다. yaw rate 측정 및 목표 yaw rate 계산에 따른 PID 제어를 하고, 차량 횡 방향 가 속도 측정 및 목표 가속도 계산에 따른 PID 제어를 하게 된다.
2.3 개발된 시뮬레이터와 해석 조건
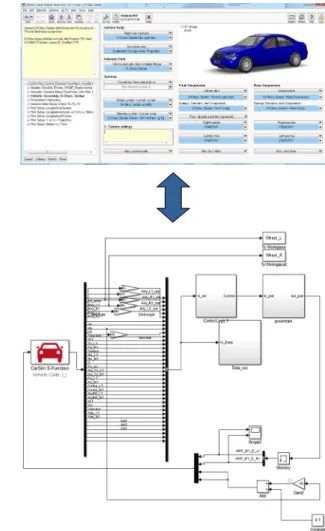
시뮬레이터의 경우 전방향 시뮬레이터로써 Carsim과 Simulink를 이용하였다. 아래 그림과 같 이 개발된 차량 파워트레인 모델 및 제어 로직을 상용 3차원 시뮬레이션 프로그램과의 연동을 통해 실제 차량 주행 상황과 유사하게 시뮬레이션이 가 능한 SILS(Software In the Loop System) 환경을 구 축하였다.
Fig. 6 Carsim - Simulink link
개발된 시뮬레이터를 통해 먼저 가성 주행로에 서의 인휠 차량 거동을 해석하게 되며, 이를 통해 관성부하를 구하게 된다. 인휠 차량의 거동 해석을 평가하기 위해서 다음과 같은 항목을 결과로 도출 한다.
(5)
손승완․김기영․차석원․임원식․김정윤
Table 2 Evaluation property Property Driving path Longitudinal speed of vehicle
Longitudinal force of tire Vertical force of tire
Lateral force of tire RPM of each wheel
Yaw rate Steer angle Aero dynamic force
3. 인휠 차량 거동 분석 결과
3.1 구동 특성 분석 결과개발된 시뮬레이터를 통해서 다음과 같은 도로들 을 시뮬레이션 하여 구동 특성을 분석해 보았다. 이 를 통해 개발된 시뮬레이터의 안정성 및 정확성을 확인하였고, 이번 연구에서는 분석하지 않았지만 새로운 도로에서도 사용이 가능할 것임을 확인할 수 있었다.
Table 3 Driving cycle & velocity
Driving cycle Velocity () Sine wave cycle
20 40 60 Double change cycle
30 40 50 Circle(R100 m)
50 60 70
Highway merge 80
Looped road edges Normal driving Real road 1 Normal driving Real road 2 Normal driving
이 논문에서는 이 중 좌우 선회와 주행경로의 고 도 차이가 있는 looped road edges 주행 경로에 대한 분석 결과를 몇 가지 제시하면 다음과 같다. looped road edges의 경우 언덕 주행이 포함된 경로이며, 총 길이는 1,121 m 주행시간은 72 s, 최대 고도 차이는 5 m 이다.
Fig. 7 Looped road edges cycle
대상 차량을 주행 도로에 따라 주행한 결과는 다 음과 같으며 target path와 차속 인휠 차량이 잘 추종 하는 것을 알 수 있다.
Fig. 8 Tracking of driving simulation
Fig. 9 Longitudinal speed of vehicle
이때 시간에 따른 타이어의 longitudinal force,
lateral force, vertical force는 각각 다음과 같다. 구동
력의 경우 뒷바퀴에서 생성되게 되므로, longitudinal
force의 경우 뒷바퀴에서 구동력을 발생시키며, 선
실차 주행 조건을 고려한 인휠 차량 거동 해석 및 동력 시험계 부하 토크 인가를 위한 구동 모터의 동적 부하 도출시스템 개발
회시 lateral force가 좌우 바퀴에서 변화하는 것을 관 측 할 수 있다. 또한 각 구동 특성 및 바퀴의 부하토 크를 도출하기 거동 해석 결과는 다음과 같다.
Fig. 10 Longitudinal force of vehicle
Fig. 11 Vertical force of vehicle
Fig. 12 Lateral force of vehicle
Fig. 13 RPM of each wheel
Fig. 14 Yaw rate
Fig. 15 Steer angle
Fig. 16 Aerodynamic force
3.2 동적 부하 도출
인휠 차량의 조향시험을 동력 시험계에서 테스트 하기 위해서는 실차 조향 시 작용하는 차량의 실제 관성 부하 토크를 좌우 부하 모터를 통해 구현해 주 게 되는데, 그 부하 토크들의 값이 실차 주행에서의 값과 비슷해야만 시험 평가에 의미가 있다고 할 수 있다. 동력계에서 관성의 모사는 차량의 거동에 매 우 빠른 응답 속도로 영향을 주는 요인이기 때문에 단순히 차량의 거동을 모사하여 인가하는 경우 동 력계 시험 평가의 신뢰성을 확보하기 어렵게 될 수 있다.
인휠 차량 구동 특성 분석을 이용하여 동적 부하
를 계산하게 된다. 차량 구동 특성들 중 부하의 경우
Seungwan Son․Kiyoung Kim․Suk Won Cha․Won Sik Lim․Jungyun Kim
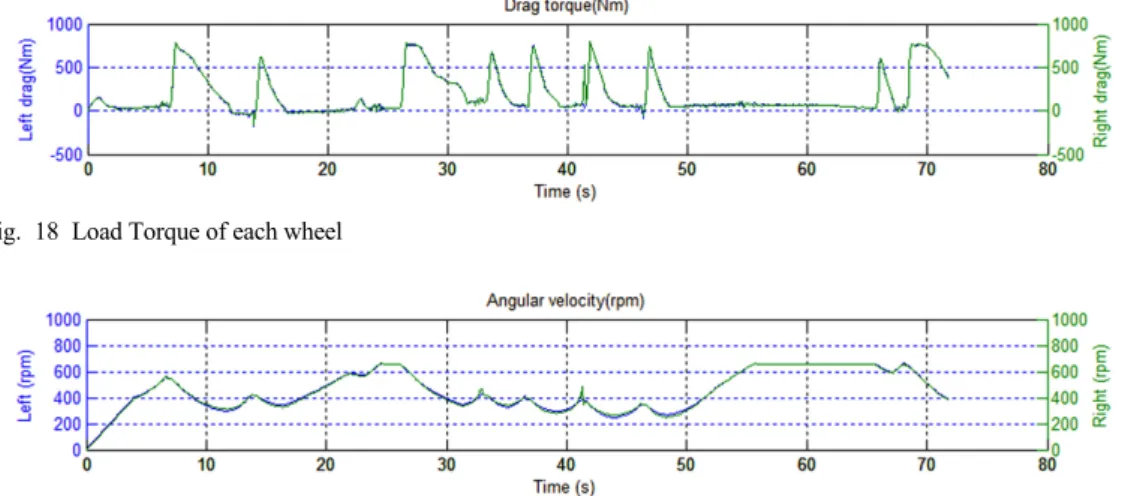
Fig. 18 Load Torque of each wheel
Fig. 19 RPM of each wheel Fig. 17 Vehicle load modeling
구름 저항, 공기 저항, 등판 저항과 같은 주행 저항 들로 나누어 볼 수 있다. 얻은 동적 결과를 바탕으로 물리적으로 동력전달계와 연결된 차량의 등가 관성 에 차량 부하 토크를 생성하여 적용하였고, 차량의 주행 속도에 따른 부하 량을 적용하여 차량의 동적 역학 모델을 구성하였다. 그림은 차량 부하 모델을 수학적으로 표현한 것이며, 각각의 저항들은 다음 과 같은 수식으로 표현할 수 있다.
9)
: 구름 저항 (6)
: 공기 저항 (7)
: 등판 저항 (8)
이를 통해 인휠 차량 각 구동 바퀴의 동적 부하 토 크(Nm)는 다음 Fig. 18과 같이 도출되며, 동력 시험 계를 구동하는 데에는 부하토크와 함께 회전수도 필요하므로, 회전속도(RPM)는 Fig. 19와 같다.
4. 결 론
인휠 차량의 경우 구동륜의 각 바퀴에서 구동력 을 발생시키므로, 선회 시 각 구동부에서의 동적 성 능에 대한 분석이 매우 중요하다.
1) 기존 내연기관 차량 및 하이브리드 차량이 1차원 방향에 대해서만 동적 능력 및 연비해석을 진행 하던 것과 달리, Carsim/Simulink를 이용하여 3차 원 도로에서의 인휠 차량 전용 시뮬레이터를 개 발하고 동적 성능을 평가하였다.
2) 조향운동은 동력계 시험기에서는 구현할 수 없 으므로, 실차 주행을 하여야 하지만 인휠 차량의 경우 좌우 구동륜을 전자제어하기 때문에 실차 조향을 하기 에는 안정성에 대한 염려가 있다. 이를 보완하기 위하여 3차원 도로에 대해 시뮬레이션 을 진행하여 실차 조향 시 작용하는 차량의 동적 부하 토크 값을 알아내었다. 이를 동력 시험계에 서는 부하 토크를 좌우 부하 모터에서 구현하는데, 이 값을 부하 모터 값으로 사용하면 될 것이다.
결과적으로 본 연구에서는 실도로에서 나타나는 빠른 동적 부하를 이용하여 그 거동 형태를 분석하 고, 현실적으로 가능한 범위 내에서 부하 토크로 인 가 할 수 있는 시험 평가 기술을 개발하는데 의의가 있다.
후 기
본 연구는 지식경제부에서 시행중인 산업기술연
Dynamic Performance Analyzing of In-wheel Vehicle considering the Real Driving Conditions and Development of Derivation System for Applying Dynamometer Using Drive Motor’s Dynamic Load Torque
구기반구축사업(지능형 그린카 파워트레인 부품 개발 사업, N0000005)과 정부(미래창조과학부)의 재원으로 한국연구재단의 지원을 받아 수행된 기초 연구사업(No.2009-0083495)의 일환으로 수행되었 습니다.
References
1) H. W. Song, Y. K. Lee, J. J. Baek, J. H. Park and S. H. Hwang, “Driving Force Distribution Algorithm for Improved Driving Efficiency of 4-wheel-drvie In-wheel Electric Vehicles,” KSAE Spring Conference Proceedings, pp.1846- 1850, 2013.
2) S. G. Shin and G. J. Choi, “Driving Perform- ance Analysis of a Rear In-wheel Motor Vehicle with Simultaneous Control of Driving Torque and Semi-active Suspension System,”
Transactions of KSAE, Vol.23, No.1, pp.11-17, 2015.
3) Y. H. Hwang, C. H. Nam, I. B. Yang and K. Y.
Jeong, “Development and Validation of In-wheel Vehicle Simulation Model,” KSAE Annual Conference Proceedings, pp.2404-2408, 2012.
4) S. W. Son, K. Y. Kim, W. S. Lim, S. W. Cha and J. Y. Kim “Developing Evaluation System
of In-wheel Vehicle’s Variable Inertia Load,”
KSAE Spring Conference Proceeding, p.983, 2015.
5) F. Jiang and Z. Gao, “An Application of Non-linear PID Control to a Class of Truck ABS Problems,” Decision and Control, Procee- dings of the 40th IEEE Conference, pp.516- 521, 2001.
6) R. Rajamani, Vehicle Dynamics and Control, 2nd Edn., Springer, New York, pp.23-36, 2013.
7) J. R. Jeong, J. D. Choi, C. W. Shin, W. S. Lim and S. W. Cha, “Development of Control Algorithm for Wheel Motor Drive Bus System considering Stability and Cornering Perfor- mance of Vehicle,” KSAE Spring Conference Proceedings, pp.1445-1449, 2012.
8) J. R. Jeong, J. D. Choi, C. W. Shin, D. H. Lee, W. S. Lim, Y. I. Park and S. W. Cha, “Deve- lopment of Integrated Control Logic of Wheel Motor Drive Electric Bus considering Stability and Driving Performance,” Transactions of KSAE, Vol.21, No.6, pp.40-48, 2013.
9) M. Ehsani, Y. Gao, S. E. Gay and A. Emadi, Modern Electric, Hybrid Electric, and Fuel Cell Vehicles, CRC Press, Boca Raton, pp.20-26, 2005.