CopyrightⒸ2015 KSAE / 134-02 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2015.23.1.011 Transactions of KSAE, Vol. 23, No. 1, pp.11-17 (2015)
후륜 인휠 모터 전기자동차의 구동 및 반능동 현가시스템 동시 제어를 통한 주행 성능 분석
신 슬 기․최 규 재*
군산대학교 기계자동차공학부
Driving Performance Analysis of a Rear In-wheel Motor Vehicle with Simultaneous Control of Driving Torque and Semi-active Suspension System
Sulgi Shin․Gyoojae Choi*
Department of Mechanical Engineering, Kunsan National University, Jeonbuk 573-701, Korea (Received 17 February 2014 / Revised 2 June 2014 / Accepted 18 July 2014)
Abstract : Recently, the in-wheel motor vehicle is rapidly developed to solve energy exhaustion and environmental problems. Especially, it has the advantage of independently driving the torque control of each wheel in the vehicle.
However, due to the weight increase of wheel, the comfort of vehicle riding and performance of road holding become worse. In this paper, to compensate the poor performance, a simultaneous control of the driving torque and semi-active suspension system is investigated. A vehicle model is generated using CarSim Software and validated by field tests.
Co-simulation of CarSim and MATLAB/Simulink with control logics is carried out, and it is found that simultaneous control of the driving torque and semi-active suspension system can improve driving stability and durability of the in-wheel motor system.
Key words : Electric vehicle(전기자동차), In-wheel motor(인휠 모터), Vehicle dynamics(차량동역학), Driving torque control(구동 제어), Semi-active suspension system(반능동 현가시스템), Simultaneous control(동시제어)
1. 서 론1)
지구 환경보호를 위해 자동차 연비 및 온실가스 배출 규제가 본격적으로 시행되고 있다. 미국, 유럽 등 선진국에서는 EPA/CARB 기준, Euro 기준 등을 통해 자동차 배기가스 관련 규제를 지속적으로 강 화하고 있으며, 소비자들 역시 효율이 좋고 운영비 가 적은 차를 요구하고 있다. 이에 따라 각국에서는 전기자동차 등 친환경 자동차 개발에 노력을 기울 이고 있다. 최근 전기자동차 구동 메카니즘으로 각 광받고 있는 기술 중 하나는 인휠 전기자동차 (in-wheel electric vehicle)이다. 인휠 모터 구동 방식
*Corresponding author, E-mail: [email protected]
의 전기자동차는 각 차륜에 전동기를 장착하여 구 동함으로써 시스템 효율 향상, 독립 구동에 따른 주 행 안정성 향상 등의 이유로 주목 받고 있다. 하지만 인휠 시스템은 구동 모터 고장 시 안전성 확보, 차륜 중량 증가에 따른 승차감 악화와 조종 안정 성능 저 하 및 내구성능 확보 등 해결해야 할 많은 과제를 가 지고 있다. 현재 인휠 전기자동차의 구동 제어에 관 련된 많은 연구1-4)가 진행되고 있지만 승차감 향상 과 주행 하중 경감 등을 위해 현가시스템과의 동시 제어 관련 연구가 부족한 실정이다.
본 논문에서는 후륜 인휠 구동 로직과 반능동 현 가시스템 제어 로직을 결합하여 차량의 승차감과 차륜의 도로 주행 하중에 미치는 영향도를 분석하
신슬기․최규재
기 위하여 MATLAB/Simulink와 CarSim 통합 시뮬 레이션(co-simulation) 환경을 구성한 후 인휠 전기 자동차의 주행 성능 변화를 분석하였다.
2. 차량동역학 모델 생성 및 검증 주행제어 알고리즘의 개발 및 성능 평가를 위한 시뮬레이션 단계에서는 실제 차량을 대신할 수 있 는 차량 모델이 필요한데 본 연구에서는 27자유도 CarSim 차량모델을 구성하였다. 차량 모델 생성을 위해 현가시스템 파라메터 측정 장치인 SPMD를 사 용하여 측정하였으며 인휠 모터를 장착한 차량에서 측정한 실차 주행 시험 데이터와 비교하여 차량 모 델의 정확도를 검증하였다.
2.1 차량 모델링
대상 차량은 국내에서 생산 중인 소형 가솔린 차 량을 후륜 인휠 전기자동차로 개조한 것이다. 차량 의 후륜에 인휠 시스템을 장착하기 위해 기존 가솔 린 차량의 토션빔 액슬 타입 섀시를 개조하여 모터 를 장착할 수 있는 구조로 변경하였으며 차량 뒷좌 석 시트를 제거하고 배터리와 인버터를 장착하였 다. 이에 따라 스프링 상 질량(sprung mass)과 스프링 하 질량(unsprung mass)은 각각 1,231.1 kg, 232.5 kg 으로 기존차량에 비하여 증가하였다. Table 1에는 주요 차량 제원을 기술한 것이다.
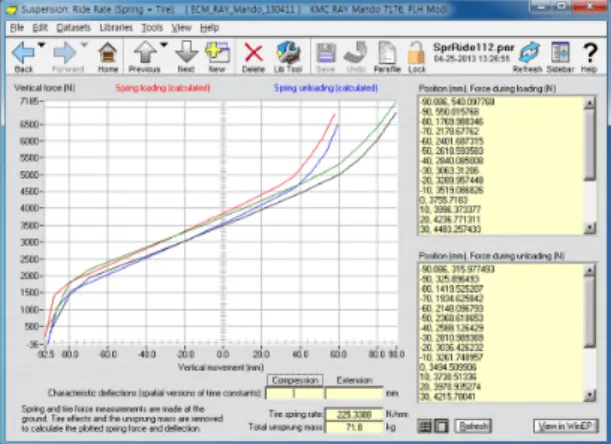
SPMD 시험 결과를 CarSim 모델에 입력하였으며 엔진 및 트랜스미션 등의 동력 전달 요소는 제거하 고 모델링 하였다. Fig. 1(a)에는 SPMD 시험 결과를 도시한 것이며, Fig. 1(b)에는 CarSim 모델을 도시한 것이다.
Table 1 Vehicle specification
Description Specifications
Vehicle height 1,700 mm
Vehicle width 1,595 mm
Sprung mass 1,231.10 kg
Unsprung mass 232.5 kg
Roll inertia 505.9 kg・m2 Pitch inertia 2,011.8 kg・m2 Yaw inertia 2,064.5 kg・m2 In wheel motor power 15 kW
2.2 차량 모델 검증
차량 모델의 정확도를 검증하기 위하여 자동차부 품연구원에서 차량 주행 시험을 실시하였으며 CarSim 시뮬레이션 결과와 비교하였다. 차량 모델 정확도 검증을 위한 시험은 KS R ISO 3888-1 이중차선변경 (double lane change)5) 시험을 실시하였다. Fig. 2는 실 차 시험에서 측정한 조향각 신호를 도시한 것이다.
(a) SPMD test results (Vertical movement vs. Force)
(b) CarSim modeling Fig. 1 CarSim vehicle model generation
Fig. 2 Steering wheel angle (field test)
후륜 인휠 모터 전기자동차의 구동 및 반능동 현가시스템 동시 제어를 통한 주행 성능 분석
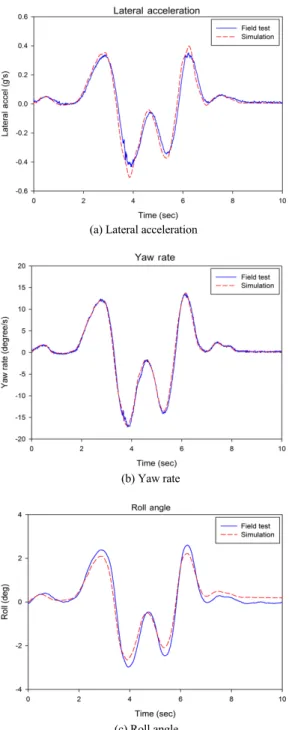
실차 시험에서 측정한 조향각을 CarSim 차량 모 델의 조향 값으로 입력하여 시뮬레이션 하였으며 실차 측정 데이터와 비교하였다. 비교 항목으로는 횡 가속도(lateral acceleration), 요 변화율(yaw rate), 롤 각(roll angle) 등이며 결과를 Fig. 3에 도시하였다.
(a) Lateral acceleration
(b) Yaw rate
(c) Roll angle
Fig. 3 Comparisons between field test and simulation results
Table 2 Simulation error (double lane change test) Max.
phase error (%)
Max.
magnitude error (%)
Lateral acceleration 3.1 10.7
Yaw rate 1.3 1.4
Roll angle 4.8 14.9
오차를 계산하기 위해 ISO/TC/WG116)에서 검토 중인 크기 오차(magnitude error)와 위상 오차(phase error)법을 이용하여 계산하였다.
각 항목별로 실차 측정값과 CarSim 해석 값을 비 교하여 Table 2에 기술하였다. 표에서 보는 바와 같 이 가장 큰 오차가 14.9% 발생하였으며 차량 모델의 정확도는 약 85%가 되어 차량 모델 사용이 가능할 것으로 판단된다.
3. 구동 및 반능동 현가시스템 제어 알고리즘 3.1 후륜 인휠 모터 구동 알고리즘
인휠 모터 구동 알고리즘은 참고 문헌1,2)에서 제 시하고 있는 모델을 사용하였으며 주 제어기, 모션 제어기, 차량 모델로 구성되어 있다. 모션 제어기에 서는 차량 모델에서 출력된 차량의 정보를 바탕으 로 타이어 미끌림, 차량 선회 반경, 차량 요구 선회 량을 계산하며 이 값을 토대로 모터 구동 토크 제어 를 수행한다. 모터 토크는 차량 모델에 입력되어 차 량 운동을 계산하며 이 결과를 이용하여 다음 단계 의 구동 제어를 실시한다. 구동 제어 Simulink 모델 은 Fig. 4에 나타낸 바와 같은 구조로 구성되었다.
3.2 반능동 현가시스템 제어 알고리즘 반능동 현가시스템 제어 알고리즘에는 승차감 제 어를 위한 스카이 훅 이론과 롤 및 피치 제어를 위한 로직을 적용하였다.7,8)
스카이 훅 이론은 1974년 Karnopp에 의해 제안된 제어 기법으로 능동 및 반능동 현가시스템에 많이 적용하고 있는 기법이다.
일반적인 수동형 댐퍼의 경우 다음과 같은 식으 로 댐퍼에 발생되는 감쇠력을 계산한다.
× (1)
여기에서, 는 수동형 댐퍼에 작용하는 힘, 는 수
Sulgi Shin․Gyoojae Choi
Fig. 4 In-wheel motor control Simulink model1,2)
동형 댐퍼의 감쇠계수, , 는 댐퍼의 상부, 하부 속도를 의미한다.
스카이 훅 제어 시 추가적으로 스프링 상 질량에 가상댐퍼가 장착되어 있다고 가정하여 다음 식과 같이 감쇠력을 표현할 수 있다.
× × (2) 여기에서 은 전체 감쇠력, 는 가상 댐퍼의 감쇠계수를 의미한다.
스카이 훅 제어가 수행되기 위해서는 식 (3)을 만 족하여야 하며 조건이 만족되지 않는 경우 기존 수 동 댐퍼와 같은 작용을 한다.
× (3) 본 연구에서는 스카이 훅 이론과 함께 선회 시 롤 값이 일정 값 이상 상승하게 되면 좌・우측의 감쇠력 을 다르게 작용시켜 롤 운동을 감소시킬 수 있는 롤 제어 로직(ARC, anti-roll control)을 적용하여 차량의 선회 시 안정성을 확보하고자 하였다. 반능동 현가 시스템 제어 알고리즘 검증을 위하여 10cm 범프 통 과 시뮬레이션을 실시하였으며 Fig. 5에 피치각 변 화를 도시하였고 Table 3에 결과를 정리하였다.
Fig. 5와 Table 3에서 보는 바와 같이 반능동 현가 시스템 제어에 의하여 수직 가속도와 피치각이 수
Table 3 Comparisons of vertical acceleration and pitch angle Description RMS value Reduction
ratio (%) Vertical
acceleration [g]
Passive 0.3114 Semi-active 0.2613 16.1 Pitch
angle [deg]
Passive 1.0414 Semi-active 0.7651 26.5
Fig. 5 Comparison between passive and semi-active suspen- sion system simulation results
동 댐퍼 대비 각각 16.1%, 26.5% 감소함을 알 수 있다.
4. 구동 및 반능동 현가시스템 동시 제어 시뮬레이션
본 연구에서는 전절에서 기술한 MATLAB/ Simu- link로 구성한 구동 로직과 반능동 현가시스템 제어
Driving Performance Analysis of a Rear In-wheel Motor Vehicle with Simultaneous Control of Driving Torque and Semi-active Suspension System
로직을 CarSim 차량 모델과 결합하여 시뮬레이션을 수행하였으며 후륜 인휠 모터 전기자동차의 주행 특성을 분석하였다.
4.1 이중 차선 변경 시뮬레이션
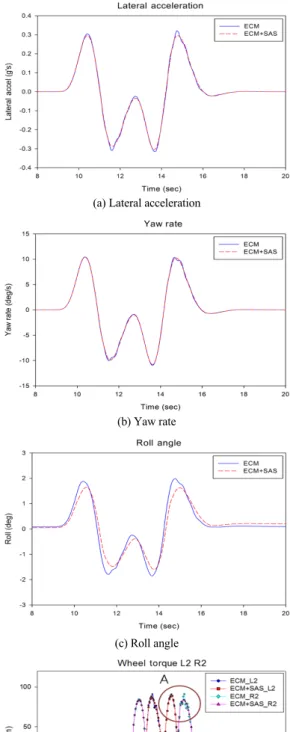
이중 차선 변경 시뮬레이션 조건은 정지상태에서 출발하여 Fig. 6에 도시한 이중 차선 변경 경로를 추 종하도록 운전자 모델을 이용하여 시뮬레이션하였 으며 속도가 60km/h에 도달한 이후 이중 차선 변경 을 수행하도록 하였다. 구동 제어만 수행한 경우와 구동 및 반능동 현가시스템 동시 제어를 수행한 경 우에 대하여 시뮬레이션을 수행하였다. 횡 가속도, 요 변화율, 롤 각, 좌·우측 바퀴에서 발생하는 토크 를 Fig. 7에 도시하였으며 비교 결과는 Table 4에 정 리하였다.
Fig. 7(a), (b)와 Table 4에서 보는 바와 같이 횡가 속도는 반능동 현가시스템 동시 제어에 의하여 최 대 6% 감소하였으나 요 변화율은 거의 변화없이 이 중차선 변경을 수행함을 알 수 있다.
Fig. 7(c)와 Table 4에서 보는 바와 같이 롤 각은 반 능동 현가시스템 동시 제어에 의하여 최대 19% 감 소함을 알 수 있다. 이것은 현가시스템 제어에 의하 여 롤 각은 감소시키고 좌·우측 바퀴의 하중 이동을 최소화시켜 타이어에서의 횡력을 최대한 발생시킴 에 따라 구동 제어만 하는 경우에 비하여 훨씬 안정 된 자세로 이중 차선 변경을 수행함을 알 수 있다.
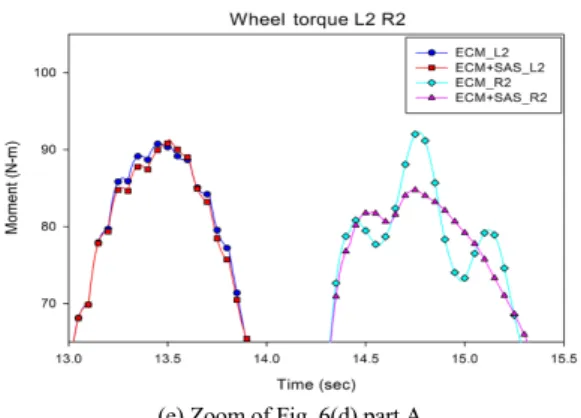
Fig. 7(d)와 Table 4에서 보는 바와 같이 후륜 좌・우 측 구동 토크는 동시 제어를 수행하는 경우 구동 제
Fig. 6 Double lane change simulation course
(a) Lateral acceleration
(b) Yaw rate
(c) Roll angle
(d) Left (L2) and right (R2) driving torque
신슬기․최규재
(e) Zoom of Fig. 6(d) part A
Fig. 7 Comparisons between driving torque control only (ECM) and semi-active suspension simultaneous control (ECM+SAS) algorithm
Table 4 Comparison of simulation results (Double Lane Change) (ECM : Driving torque control only, ECM+
SAS : Driving torque and semi-active suspension simultaneous control)
Description RMS Reduction
ratio(%) Left wheel torque
(N-m)
ECM 30.5199
ECM+SAS 30.4489 3.0 Right wheel torque
(N-m)
ECM 29.9227
ECM+SAS 29.8697 3.0 Yaw rate
(deg/sec)
ECM 3.5143
ECM+SAS 3.4961 1.3 Roll angle
(deg)
ECM 0.6625
ECM+SAS 0.5871 19.0 Lateral acceleration
(g)
ECM 0.1026
ECM+SAS 0.1009 6.0
어만 하는 경우에 비하여 최대 3% 감소함을 알 수 있으며 모터 구동에 필요한 에너지를 절감할 수 있 어 효율 향상에도 기여 할 수 있다.
이와 같이 이중 차선 변경 시뮬레이션 결과 반능 동 현가시스템을 이용한 자세제어를 통하여 인휠 구동 전기자동차가 안정적인 주행과 에너지 효율 향상에 기여할 수 있음을 확인할 수 있었다.
4.2 불규칙 노면 통과 시뮬레이션
불규칙 도로 노면 주행 시 바퀴에 작용하는 도로 하중에 반능동 현가시스템 제어가 미치는 영향도를 분석하기 위하여 사인 스윕 노면 통과 시뮬레이션 을 수행하였다. 노면은 좌·우 위상이 같은 사인 스윕
Fig. 8 Swept sine road profile
(a) Left wheel
(b) Right wheel Fig. 9 Tire vertical force
노면이며 노면 프로파일은 Fig. 8에 도시한 바와 같 다. 속도는 30km/h로 직선 구간 주행 후 사인 스윕노 면을 통과하는 시뮬레이션을 수행하였다.
후륜 인휠 모터 전기자동차의 구동 및 반능동 현가시스템 동시 제어를 통한 주행 성능 분석
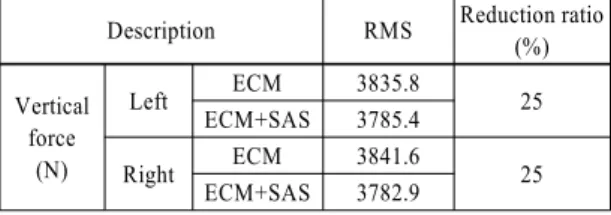
Table 5 Comparison of tire vertical force (sine sweep road test) Description RMS Reduction ratio
(%) Vertical
force (N)
Left ECM 3835.8
ECM+SAS 3785.4 25
Right ECM 3841.6
ECM+SAS 3782.9 25
Fig. 9에는 주행 중 구동 제어만 수행한 경우와 반 능동 현가시스템 동시 제어를 수행한 경우 타이어 에 작용하는 수직력을 도시한 것으로 이 힘이 바퀴 내부에 설치된 인휠 모터와 감속기 등 핵심 부품에 전달되어 고장 등 내구신뢰성에 영향을 미치게 된 다. Table 5에는 타이어 수직력의 RMS 값과 감소율 을 기술한 것이다.
Fig. 9와 Table 5에서 보는 바와 같이 후륜 좌·우측 타이어에 작용하는 수직력은 반능동 현가시스템 제 어에 의하여 최대 25% 감소함을 확인할 수 있었으 며 이에 따라 휠에 장착된 모터 및 감속기 등 핵심 부품에 전달되는 힘이 감소하여 내구신뢰성이 향상 될 것으로 판단된다. 이것은 인휠 모터 구동 전기자 동차에 반능동 현가시스템을 장착하여 자세 제어 뿐만 아니라 불규칙 노면으로 부터의 도로 하중 전 달을 줄일 수 있어 시스템 내구신뢰성을 향상 시킬 수 있는 장점을 가지고 있음을 알 수 있다.
5. 결 론
본 논문에서는 후륜 인휠 모터 구동 전기자동차 의 구동 및 반능동 현가시스템 동시 제어를 통한 주 행 특성 시뮬레이션에 대한 연구를 수행하였다.
1) CarSim을 이용하여 대상 차량을 모델링 한 후 차 량 주행시험 결과와 비교하여 정확성을 검증하 였으며 차량 모델의 정확도가 약 85% 이상 일치 함을 확인하였다.
2) 구동 제어 로직과 반능동 현가시스템 제어로직 을 MATLAB/Simulink로 구성한 후 CarSim 모델 과 통합 시뮬레이션(co-simulation) 환경을 구성 하여 차량의 주행 특성을 분석하였다.
3) 이중 차선 변경 시뮬레이션 결과 구동 제어와 반 능동 현가시스템 동시 제어를 통하여 차량의 롤 각이 최대 19% 감소하여 안정된 주행 자세를 유
지할 뿐만 아니라 좌・우 바퀴에서의 인휠 모터 토크가 최대 3% 감소하여 에너지 효율이 향상될 수 있음을 확인 하였다.
4) 사인 스윕 노면 주행 시뮬레이션 결과 타이어에 작용하는 도로 하중이 25% 이상 감소하여 반능 동 현가시스템 동시 제어가 시스템 내구신뢰성 향상에도 기여할 수 있음을 확인하였다.
References
1) J. H. Park, J. H. Choi, B. Wang, H. W. Song and S. H. Hwang, “Development of Driving Stability Simulator for Electric Coner Module,”
KSAE Spring Conference Proceedings, pp.1476- 1481, 2012.
2) H. W. Song, Y. K. Lee, J. J. Baek, J. H. Park and S. H. Hwang, “Driving Force Distribution Algorithm for Imporved Efficiency of 4-wheel- drive In-wheel Electric Vehicles,” KSAE Spring Conference Proceedings, pp.1846-1650, 2013.
3) S. Sakai, H. Sado and Y. Hori, “Motion Control in an Electric Vehicle with Four Independently Diven In-wheel Motors,” IEEE Trans. Mecha- tronics, Vol.4, No.1, pp.9-18, 1999.
4) S. H. Kim, C. J. Kim, D. H. Kim, J. Y. Choi, M. S. Choi and C. S. Han, “A Study on Trac- tion and Yaw-rate Control for the Rear In-wheel Independent Drive Electric Vehicle,” KSAE Spring Conference Proceedings, pp.1015-1019, 2011.
5) KS Standards Passenger Car - Test Track for a Severe Lane Change Manoeuvre - Part 1 : Double Lane Change, KATS, 2003.
6) T. O. Tak, “Standardization of Vehicle Dyna- mics Simulation Technology,” Auto Journal, KSAE, Vol.34, No.4, pp.20-24, 2012.
7) D. Karnopp, “Active Damping in Road Vehicle Suspension System,” Vehicle System Dyna- mics, Vol.12, Issue 6, pp.291-311, 1983.
8) Y. G. Kim, A Study on Semi-active Suspension for a Large Bus Using by Sky-hook Algorithm, M. S. Thesis, Pusan National University, Busan, Korea, 2011.