CopyrightⒸ2013 KSAE / 126-06 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2013.21.6.040 Transactions of KSAE, Vol. 21, No. 6, pp.40-48 (2013)
휠 모터 구동 전기 버스의 차량 안정성 및 주행 성능을 고려한 통합 제어 로직 개발
정 종 렬
1)․최 종 대
1)․신 창 우
1)․이 대 흥
1)․임 원 식
2)․박 영 일
3)․차 석 원
*1)서울대학교 기계항공공학부1)․서울과학기술대학교 기계자동차공학과2)․서울과학기술대학교 기계시스템디자인공학과3)
Development of Integrated Control Logic of Wheel Motor Drive Electric Bus considering Stability and Driving Performance
Jongryeol Jeong
1)․Jongdae Choi
1)․Changwoo Shin
1)․Daeheung Lee
1)․Wonsik Lim
2)․ Yeong-il Park
3)․Suk Won Cha
*1)1)School of Mechanical & Aerospace Engineering, Seoul National University, Seoul 151-744, Korea
2)Department of Mechanical and Automotive Engineering, Seoul National University of Science and Technology, Seoul 139-743, Korea
3)Department of Mechanical System Design Engineering, Seoul National University of Science and Technology, Seoul 139-743, Korea
(Received 18 December 2012 / Revised 18 March 2013 / Accepted 29 March 2013)
Abstract : Recently, many types of electric vehicles including a heavy duty vehicle have been developed and released because of the better fuel economy and less gas products. In this study, research about an electric bus which utilizes the wheel motor drive system was conducted. The wheel motor is a motor connected to the wheel directly only with a simple gear so that the developer can utilize the space efficiently and the whole system efficiency will be better because of simple structure. However, because it is different from former types of vehicles which use the differential gear, the development of the integrated control logic is required in order to meet the vehicle stability and driving performance.
The developed control logic is composed with direct yaw moment control, regenerative braking control and slip control logics. It is compared to the control logics which does not consist of direct yaw moment control and slip control when the vehicle is exposed in tough situations. For the unification of the control logic, a few maps were developed and applied to determine the output torque of each motor according to the driving status. As a result, it is shown that the developed control logic is more safe and well follow the target speed than the other control logic applied simulations.
Key words : Electric bus(전기 버스), Wheel motor drive system(휠 모터 구동 시스템), Direct yaw moment control (직접 요 모멘트 제어), Regenerative braking control(회생 제동 제어), Slip control(슬립 제어), Forward simulation (전방향 시뮬레이션)
Nomenclature1) Cα : conering stiffness of tire, kg・m/s2 F : force, Nm
I : momnet of inertia, kgm
*Corresponding author, E-mail: [email protected]
K : coefficient for control, - M : moment of vehicle, Nm R : turn radius of vehicle, m W : weight of vehicle, kg・m/s2 g : acceleration of gravity, m/s2 h : height of mass center, m
휠 모터 구동 전기 버스의 차량 안정성 및 주행 성능을 고려한 통합 제어 로직 개발
j : braking ratio to gravity, m/s2 l : length, m
m : mass, kg
x : distance of x axis, m y : distance of y axis, m
: yaw angle, deg
: wheel steering angle, deg
: angle of inclination, deg
: coefficient of friction, -
: slip ratio of tire, -
Subscripts a,b : aero, brake
f,r,w : front, rear, width l,r : left, right
x,y,z : axis of dynamics model
1. 서 론
세계적으로 차량 연비 개선 및 배출 가스 저감에 대한 요구가 증가함에 따라 각종 하이브리드, 연료 전지 및 전기 차량에 대한 연구 및 개발이 가속화되 고 있다. 이러한 연구 개발은 개인이 이용하는 승용 차량에서부터 공공이 이용하는 대중교통 차량에 이 르기까지 광범위하게 적용되고 있다. 특히, 도심 시 내버스의 경우 출발 및 정지가 반복적으로 발생하 고 엔진 공회전이 빈번하게 발생하여 연비가 좋지 않은 특성이 있다.1) 본 논문은 이러한 기존 시내버 스 차량의 연비, 배기 가스 및 구동 성능 등에서의 개선을 위한 휠 모터 구동 전기 버스에 대한 연구를 수행하였다.
휠 모터 구동 전기 버스의 경우 차량의 구동을 위 한 동력을 제공하는 모터가 각 구동륜에 직결되어 있어 동력 손실이 적고 시스템이 간단하다는 장점 이 있는 반면, 기존의 차동기어로 좌・우 동력 분배 를 적용하던 차량에 비해, 좌・우 구동 모터를 각기 제어하여 차량의 안정성 및 성능을 확보하기 위하 여 새로운 제어 로직의 개발이 필요하다는 특징이 있다.2) 본 논문에서는 이러한 휠 모터 구동 전기 버 스의 차량 안정성 및 주행 성능을 고려한 통합 제어
로직을 개발하고 상용 시뮬레이션 프로그램을 이용 한 개발 제어 로직의 검증을 수행하였다.
본 연구에서는, 먼저 연구에 적용된 휠 모터 구동 전기 버스 차량 시스템의 특징을 분석하고 시뮬레 이션 수행을 위한 차량 시스템 모델링을 수행하였 다. 다음으로 차량의 통합 제어 로직 개발을 위해 적 용된 각종 제어 원리의 기본 개념을 분석하고 분석 된 다양한 제어 로직을 통합한 통합 제어 알고리즘 을 개발하였다. 개발된 제어 로직과 기존 적용된 단 순 제어 로직을 개발된 시뮬레이션 프로그램에 적 용하여 비교 및 검증하는 작업을 수행하였다.
2. 휠 모터 구동 전기 버스
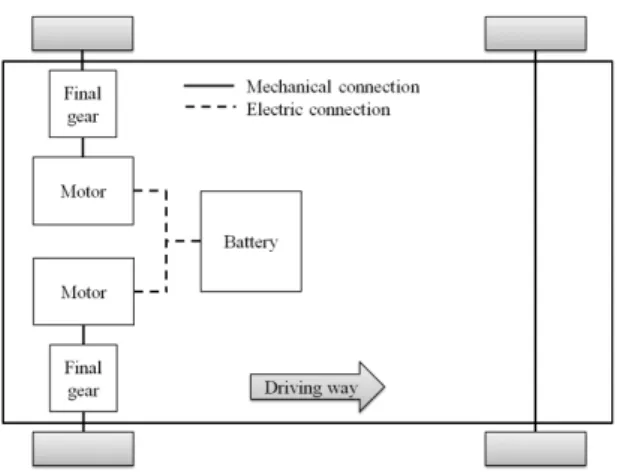
2.1 휠 모터 구동 전기 버스 시스템 구성 및 제원 본 연구는 차량의 구동륜인 좌・우 후륜이 각각 별도의 구동 모터로 차량의 구동이 이루어지는 Fig.
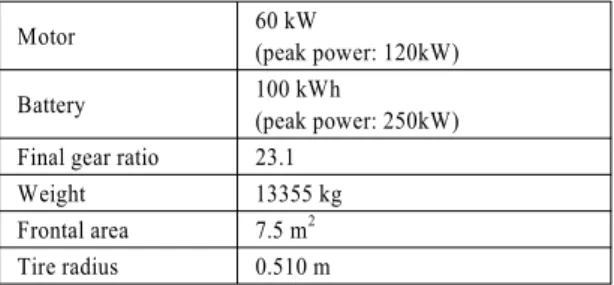
1의 휠 모터 구동 전기 버스 시스템에 대하여 수행 되었다. 각 좌・우 후륜은 별도의 모터로 감속기어 를 통해 직결되어 있다. 기존 차량이 다단으로 구성 된 트랜스미션과 차동기어를 통해 차량의 엔진 또 는 모터에서 출력되는 구동력을 좌・우 바퀴로 전달 하는 것과 달리 별도의 모터가 단순 감속기어만을 거쳐 좌・우 바퀴를 통해 각기 다른 동력원이 전달 된다는 특징이 있다. 2개의 모터는 Fig. 1에서와 같 이 1개의 배터리로부터 동력 에너지를 공급받게 된 다. 연구에 적용된 차량 구성 및 제원은 Table 1과 같다.3)
Fig. 1 Wheel motor drive electric bus system
Jongryeol Jeong․Jongdae Choi․Changwoo Shin․Daeheung Lee․Wonsik Lim․Yeong-il Park․Suk Won Cha
Table 1 Components and specification of the vehicle
Motor 60 kW
(peak power: 120kW)
Battery 100 kWh
(peak power: 250kW) Final gear ratio 23.1
Weight 13355 kg
Frontal area 7.5 m2 Tire radius 0.510 m
2.2 휠 모터 구동 전기 버스 시스템 모델링 본 논문에서는 Fig. 1과 같은 구조의 휠 모터 구동 전기 버스 시스템의 모델링을 수행하였다. 연구를 통해 개발된 제어 로직의 안정성 및 신뢰성 검증과 기존 제어 로직과의 비교를 위해 상용소프트웨어인 MATLAB/SIMULINK와 TruckSim을 연동한 모델링 환경을 구축하였다. TruckSim은 6자유도의 차량 동 역학 모델을 기반으로한 차량의 거동을 분석하는 상용 시뮬레이션 프로그램이다.4) 주어진 주행사이 클 및 조향각을 바탕으로 SIMULINK 내에 개발된 운전자 모델에서는 가・감속 신호를 출력한다. 이러 한 출력 신호를 바탕으로 개발된 제어 로직에서는 좌・우 모터의 출력량 또는 회생제동량을 결정하게 된다. 결정된 모터의 토크 명령을 SIMULINK 내의 모델링된 파워트레인 모델에서 각 모터의 명령 토 크에 따른 효율 등을 고려한 출력 구동 토크를 계산 하고, 다시 모터에서 출력된 구동 토크는 감속기 모 델을 거쳐 바퀴로 출력되게 된다. 또한 모터의 구동 또는 회생제동을 위해 방전 또는 충전된 전류량을 바탕으로 배터리의 충전 상태(State of Charge, SOC) 를 계산하게된다. 이와같이 파워트레인에서 계산된 바퀴의 출력량을 바탕으로 TruckSim의 차량 모델에 서는 차량의 6자유도 거동을 분석하게 된다. 분석된 차량의 거동은 다시 SIMULINK의 제어 로직으로 입 력되고, 이러한 일련의 과정의 반복 수행을 통해 시 뮬레이션이 수행된다.
3. 휠 모터 구동 시스템 통합
제어 로직 개발
본 연구에서는 휠 모터 구동 시스템의 통합 제어 로직 개발을 위하여 다양한 제어 로직의 개발 및 통
합 과정이 수행되었다. 먼저, 휠 모터 구동 시스템의 좌・우 구동력이 각각 다르게 적용될 수 있는 특징을 고려한 직접 요 모멘트 제어(Direct yaw moment control) 로직이 개발되었으며, 전기 차량의 효율 개 선에 중요한 요소인 회생 제동 제어 로직이 개발되 었다. 또한 각 구동 바퀴의 과도한 슬립 발생을 억제 하고 차량이 안정적으로 제어될 수 있도록 슬립 제 어 로직을 개발 적용하였다. 개발된 각 제어 로직은 통합 과정을 거쳐 휠 모터 구동 시스템 통합 제어 로 직으로 시뮬레이션에 적용되었다.
3.1 직접 요 모멘트 제어
휠 모터 구동 시스템은 좌・우 각 모터가 별도의 출력을 발생시킬 수 있기 때문에 이러한 좌・우 모터 의 출력 차이로부터 차량의 선회 모멘트(Yaw moment) 를 발생시킬 수 있다. 발생된 차량의 선회 모멘트를 이용해 차량의 선회 성능 및 선회 안정성을 향상시 키는 효과를 얻을 수 있다.
Fig. 2와 같이 차량이 주행 시 차량의 바퀴에 종・
횡방향 힘이 발생하게 된다. 이를 식 (1) ~ (3)과 같이 정리할 수 있다.
cos
sin (1)
sin
cos (2)
sin cos
cos
sin
(3)
또한 운전자의 요구 선회율의 경우, 차량의 주행 속도와 회전 반경으로 결정할 수 있다. 차량의 회전 반경은 다시 전륜의 조향각의 식으로 표현할 수 있 으며 이를 정리하면 식 (4)와 같다.3,5)
(4)
이 때, 차량의 선회 성능 및 안정성 향상을 위해
Development of Integrated Control Logic of Wheel Motor Drive Electric Bus considering Stability and Driving Performance
Fig. 2 Vehicle dynamics model of electric bus
Fig. 3 Lateral acceleration of the vehicle
차량에 발생시키는 요 모멘트는, 식 (1) ~ (3)과 현재 선회율 및 요구 선회율의 차이를 이용한 제어량을 바탕으로 식 (5)와 같이 결정되게 된다.6)
∆ cos (5) 식 (5)와 같이 차량에 선회 모멘트를 발생시켜 제 어하는 경우 제어 변수 K의 선정이 중요한 요소가 된다. 제어 변수 K의 값이 큰 경우, 요구 선회율에 따 라 차량이 안정적으로 추종하는 경향을 보이나 차 량의 속도가 저속이고 주행 선회율이 낮은 안정적 인 상황에서도 지나치게 민감하게 반응하여 반복적 으로 모멘트가 발생하는 문제점을 보인다. 반대로 제어 변수 K의 값이 작은 경우, 차량이 상대적으로
안정적인 상황에서는 민감한 반응을 보이지 않으 나, 차속이 높고 선회율이 높은 과도한 주행 상황에 서 요구 선회율을 상대적으로 추종하지 못하는 경 향을 보인다. 따라서 본 연구에서는 Fig. 3과 같이 차 량의 주행 속도와 선회율에 따른 횡방향 가속도 발 생량을 분석하여 제어 변수 K를 상황에 따라 조절 해 주는 제어 로직을 적용하였다.
3.2 회생 제동 제어
3.2.1 차량 동역학 수식 기반 전・후륜 제동력 분배 회생 제동은 하이브리드 차량을 비롯한 다양한 전기 동력원을 이용하는 차량의 연비 개선율을 높 이는 중요한 요소이다. 본 연구에서는 차량의 구동 및 회생 제동을 위한 모터가 좌・우측 후륜 바퀴와 연결되어 있기 때문에 차량의 후륜 바퀴를 통해 회 생 제동을 수행하게 된다.
먼저, 모터에서 회생 제동을 통해 배터리를 충전 하는 양을 정하기에 앞 서, 운전자의 요구 제동량에 따른 차량의 안정적인 제동을 위해 전・후륜의 제동 량 분배를 하게된다. 전・후륜의 제동량 분배비는 Fig. 4를 바탕으로 정리한 식 (6)과 같이 각 전륜 및 후륜에 작용하는 하중 분포에 따라 Fig. 5의 이상 곡 선(ideal curve)과 같이 제동량을 분배하게 된다.
cos
sin
cos
sin
(6)
Fig. 4 Vehicle dynamics model of side view
정종렬․최종대․신창우․이대흥․임원식․박영일․차석원
Fig. 5 Braking force distribution strategy
하지만 실제 차량에 적용함에 있어서, 후륜에 더 많은 제동량이 분배되는 이상 곡선 위쪽 영역에서 제동이 발생할 경우, 후륜이 먼저 잠기게 되어 차량 이 불안정한 상태가 될 수 있기 때문에, 전・후륜 제 동량 분배비를 이상곡선 아래에서 이루어질 수 있 도록 선정하게 된다.7,8) 따라서 본 논문에서는 Fig. 5 와 같이 전・후륜의 제동 분배량을 선정하여 적용하 였다.
전・후륜 제동 분배비가 선정되면, Fig. 5의 Point A와 같이 후륜의 주어진 제동량이 모터의 용량보다 작은 경우 모든 제동량을 회생하게 된다. 반대로 Fig. 5의 Point B와 같이 후륜의 요구 제동량이 모터 회생 가능량보다 큰 경우에는 모터의 회생 제동과 기계적 제동을 합하여 제동량을 충족시키게 된다.
한편 전륜에서는 주어진 제동량만큼 기계적 제동을 수행하게 된다.
3.2.2 회생 제동 제한 조건
일반적으로 차량 안전성 문제로 인해 전기 구동 차량에서 회생 제동은 일정속도 이하에서는 제한을 두게된다.7) 본 연구에서는 Fig. 6의 시내 버스의 주 행특성을 분석하여 개발된 주행사이클의 시뮬레이 션 결과를 바탕으로 회생제동 제한 속도를 선정하 였다.9)
Fig. 7은 차량의 주행 속도 대비 회생 에너지의 분 포량을 분석한 그래프이다. 15km/h 이하의 회생 에 너지 량은 전체의 13.7%에 해당하며, 20km/h 이하 의 회생 에너지 량은 전체의 24.7%이다. 약 5km/h의
Fig. 6 Driving cycle - KATECH G
Fig. 7 Analysis of braking energy
주행속도를 달리 선정할 때 약 11.0%의 회생 제동 가능 에너지량이 변화하게 된다. 따라서 본 연구에 서는 회생 제동 제한 속도를 15km/h로 선정하여 제 어 로직을 개발하였다.
또한 배터리의 안정적인 출력 확보 및 내구성 확 보를 위하여 배터리의 SOC가 0.9 이상인 경우는 회 생 제동을 제한하는 구속조건을 적용하였다.
3.3 슬립 제어
일반적으로 바퀴에서 지면으로 전달되는 힘과 바 퀴의 슬립율의 관계는 비선형적인 관계를 갖고 있 다. 본 연구에서는 운전자 모델, 직접 요 모멘트 제 어 및 회생 제동 제어를 통해 주어진 각 구동 바퀴의 요구 힘을 바탕으로 각 바퀴의 요구 슬립율을 계산 하게 된다. 하지만 비선형적인 관계를 바탕으로 한 슬립율의 계산은 상대적으로 많은 계산량을 필요로 하게 된다. 따라서 본 연구에서는 식 (7)과 같이 바퀴 에서 전달되는 힘과 차량의 슬립율은 주어진 상수 를 바탕으로 선형적인 관계를 갖는다고 가정하여 각 바퀴의 요구 슬립율을 계산하였다.
휠 모터 구동 전기 버스의 차량 안정성 및 주행 성능을 고려한 통합 제어 로직 개발
Fig. 8 Slip control algorithm
(7)
계산에 적용된 상수는 시뮬레이션에 적용된 상용 프로그램인 TruckSim의 타이어 모델 데이터를 바탕 으로 적용하였다. 타이어 모델의 슬립율에 따른 바 퀴 구동력 값을 바탕으로 바퀴에서 최대 구동력이 출력될 때의 슬립율 값을 식 (7)에 대입하여 상수 값 을 계산하였다. 또한 슬립율이 일정 값 이상으로 커 지게 되면 이는 바퀴에서 작용하는 힘의 감소를 초 래하게 되며, 실질적인 차량에서 원하지 않는 슬립 의 발생이 되게 된다. 따라서 본 연구에서는 차량의 요구 슬립율의 절대값은 0.1보다 작도록 제한하는 로직을 적용하였다. 식 (7)을 바탕으로 결정된 각 바 퀴의 요구 슬립율 량 및 현재의 슬립율 량을 바탕으 로 Fig. 8과 같은 PID 제어를 통한 기존 주어진 요구 토크량과의 계산을 통해 최종적으로 각 모터에 전 달되는 명령 토크량을 결정하게 된다.10)
3.4 통합 제어 로직 개발
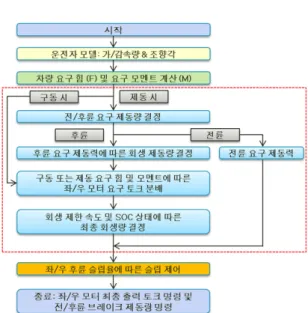
본 연구에서는 앞서 개발된 각 제어 로직을 통합 하여 순차적인 과정을 통해 최종적으로 각 구동 모 터에 출력 토크 또는 회생 제동 토크를 명령하는 제 어 로직을 개발하였다. 이는 Fig. 9와 같은 알고리즘 을 통해 진행된다.
먼저, 운전자 모델에서는 현재의 차량 속도와 목 표 추종 속도 및 요구 선회량을 바탕으로 요구 가속 량 또는 감속량 및 조향각을 결정하게 된다. 이와 같 이 결정된 요구 가・감속량 및 조향각을 바탕으로 제 어 로직에서는 직접 요 모멘트 제어 이론을 바탕으 로 한 차량의 요구 힘(Freq)과 요구 모멘트(Mreq)를 계 산하게 된다. 이때 차량의 요구 힘이 양의 값을 갖는 가속 명령 시에는 요구 힘과 요구 모멘트에 따른 각 모터의 동력 분배를 수행하게 된다. 반대로 차량의 요구 힘이 음의 값을 갖는 감속 명령 시에는 다시 회 생 제동 제어 이론을 바탕으로 한 차량 전・후륜의
Fig. 9 Algorithm of integrated control logic for wheel motor drive electric bus
제동량 분배 후 그에 따른 후륜 요구 회생 제동량을 결정하게 된다. 결정된 후륜 요구 회생 제동량과 요 구 모멘트량을 바탕으로 구동 시와 같이 좌・우 모터 의 요구 토크량을 결정하게 된다. 본 연구에서는 Fig. 9의 점선 내에 있는 알고리즘의 차량 요구 힘 및 모멘트에 따른 좌・우 모터의 명령 토크량을 Fig. 10 의 제어 맵을 바탕으로 결정하게 된다. 이는 입력으 로 주어지는 차량 구동력 및 모멘트를 발생시키기 위해 좌・우 모터에서 각기 출력해야하는 토크량을 미리 계산한 맵이다. 차량의 좌・우 바퀴간 거리 및 감속 기어비 등의 차량 데이터를 바탕으로 계산되 어지며, 각 모터에서 출력 가능한 최대 토크 및 제동 시에는 전・후륜의 동력 분배량과 해당 출력 상태에 서의 모터 회생량을 고려하여 최종 출력 토크량을 결정하게 된다. 본 제어맵을 통해 실질적으로 구동 및 제동 시의 구분 없이 직접 선회 모멘트 제어를 통 해 결정된 차량의 요구 힘과 요구 모멘트 양만을 바 탕으로 각 모터의 명령 토크를 결정하게 된다.
Jongryeol Jeong․Jongdae Choi․Changwoo Shin․Daeheung Lee․Wonsik Lim․Yeong-il Park․Suk Won Cha
(a)
(b)
Fig. 10 (a) Map of desired torque for left motor, (b) Map of desired torque for right motor
최종적으로 결정된 각 모터의 명령 토크와 그에 따른 요구 슬립율 및 차량의 현재 슬립율을 바탕으 로 좌・우 모터의 명령 토크량을 수정하게 되며 이러 한 과정을 거쳐 정해진 각 모터의 명령 토크량은 파 워트레인 모델의 각 모터로 전달되어 차량의 운전 을 수행하게 된다.
4. 시뮬레이션 및 결과
본 연구에서 개발된 직접 요모멘트 제어, 회생 제 동 및 슬립 제어가 모두 적용된 통합 제어 로직(제어 로직 1) 및 직접 요 모멘트 제어 및 슬립 제어가 적용 되지 않고 회생 제동만 적용된 제어 로직(제어 로직 2)의 비교 분석을 통해 개발된 제어 로직의 안정성 및 성능을 비교 분석하였다. 각 제어 로직 적용 시의 상황을 분석하기 위하여, 차량의 선회 성능 및 안정
성을 시험할 수 있는 시뮬레이션 1과 미끄러운 노면 에서의 차량의 슬립 제어 상태를 확인할 수 있는 시 뮬레이션 2를 수행하였다.
4.1 선회 성능 시험 시뮬레이션
선회 성능 시뮬레이션을 위하여 Fig. 11(a)와 같은 주행 속도를 추종하며 반경 50m의 도로를 주행하는 차량의 시뮬레이션을 수행하였다.
시뮬레이션 결과, 직접 요모멘트 및 슬립 제어 로 직이 적용된 제어 로직 1이 그렇지 않은 제어 로직 2 적용 시뮬레이션 결과보다 상대적으로 안정적으로 속도 추종을 하며 주행 가능한 것을 확인할 수 있었 다. 직접 요모멘트 및 슬립 제어 로직이 적용되지 않 은 제어 로직 2의 경우, 저속 구간에서는 큰 문제 없 이 제어 로직 1이 적용된 시뮬레이션 결과와 유사한 결과를 보이다가 주행 속도가 목표 최고 속도인 약 65km/h에 이르러 차의 횡방향 가속도가 급격하게 증가하며 전복(roll over) 되는 것을 확인할 수 있었 다. 이는 앞서 설명한 제어 로직 1의 차량 횡방향 가 속도에 따른 제어변수 조정으로 설명할 수 있다.
Fig. 11(d)와 같이 차량의 횡방향 가속도가 급격하게 증가함에 따라 제어 로직에서는 차량의 제어 변수 조정을 통하여 각 모터의 명령 토크량을 조정하여 차량의 횡방향을 상쇄시키는 모멘트를 발생시키게 된다. 이러한 결과로 Fig. 11(d)와 같이 일정 수준 이 상에서 차량의 횡방향 가속도가 더 이상 증가하지 않는 것을 확인할 수 있다.
4.2 슬립 제어 시험 시뮬레이션
미끄러운 도로면에서 차량의 주행 안정성을 확인 하기 위해 앞 선 시뮬레이션과 동일한 목표 주행 속 도를 따라 미끄러운 도로면(마찰계수 0.15)에서 직 선 주행하는 차량의 시뮬레이션을 수행하였다.
Fig. 12(a)와 같이 직접 요모멘트 및 슬립 제어 로 직이 적용된 제어 로직 1은 목표 속도를 비교적 안 정적으로 추종이 가능한 것을 확인할 수 있었다. 하 지만 제어 로직 2의 경우, 과도한 슬립 발생으로 인 한 모터에서의 출력 토크가 바퀴를 통해 지면으로 충분히 전달되지 않아 차량의 목표 속도 추종에 상 대적으로 어려움이 있는 것을 확인할 수 있다.
Development of Integrated Control Logic of Wheel Motor Drive Electric Bus considering Stability and Driving Performance
(a)
(b)
(c)
(d)
Fig. 11 Results of the simulation 1 (a) Vehicle driving speed, (b) Driving trajectories of the vehicle, (c) Yaw rate, (d) Lateral acceleration
(a)
(b)
(c)
Fig. 12 Results of the simulation 2 (a) Vehicle driving speed, (b) Slip ratio of the left wheel, (c) Slip ratio of the right wheel
Fig. 12(b)와 (c)는 좌・우측 바퀴의 차속에 대한 슬 립율을 나타내는 그래프이다. 차량 출발 시와 정지 시 제어 로직 1의 경우에도 슬립율 약 0.5에 가까운 과도 슬립이 발생하는 것을 확인할 수 있으나, 약 1 초 내에 다시 안정적인 상태로 돌아오는 것을 확인 할 수 있었다. 하지만 제어 로직 2의 경우 슬립율 0.1 이상의 과도 슬립이 발생하여 계속되는 약 30초간 의 가속 구간에서 과도한 슬립율이 지속되면서 차 량의 가속이 충분히 이루어지지 않아 목표 속도를 추종하지 못하는 것을 확인할 수 있었다.
5. 결 론
본 논문에서는 휠 모터 구동 전기 버스의 차량 안
정종렬․최종대․신창우․이대흥․임원식․박영일․차석원
정성 및 구동 성능 확보를 위한 제어 로직을 개발하 였다. 개발된 제어 로직은 직접 요 모멘트 제어, 회 생 제동 제어 및 슬립 제어를 통합한 통합 제어 로직 이다. 개발된 제어 로직 및 기존의 단순 요구 동력 동일 분배 제어 로직의 비교를 위하여 차량 거동 모 사가 가능한 상용 시뮬레이션 프로그램인 MATLAB/
SIMULINK 및 TruckSim을 연동하여 시뮬레이션을 수행하였다. 각 시뮬레이션은 적용된 직접 요 모멘 트 제어 및 슬립 제어의 검증을 위하여 목표 속도를 추종하는 선회 운동 시뮬레이션 및 마찰 계수가 낮 은 미끄러운 도로에서의 목표 속도 추종 시뮬레이 션을 수행하였다.
1) 반경 50m의 원형 도로에서 최고 속도 65km/h의 목표 속도를 추종하는 차량 시뮬레이션 수행 시, 직접 요 모멘트 미적용 제어 로직이 적용된 차량 의 경우, 주행 속도가 높아짐에 따라 차량 횡방향 가속도가 계속 증가하여 최종적으로는 차량이 전복(roll over)되는 현상이 발생하였다. 그러나 직접 요 모멘트 제어 로직이 적용된 차량의 경우, 차량의 횡방향 가속도가 증가함에 따라 차량의 안정성을 위하여 이를 상쇄시키는 모멘트를 양 모터의 출력 토크 차를 이용해 발생시킴으로써 차량이 상대적으로 안정적으로 주행이 가능한 것을 확인할 수 있었다.
2) 적용된 슬립 제어의 검증을 위해 마찰계수가 0.15로 매우 미끄러운 도로면에서 역시 목표 최 고 속도 65km/h의 주행 사이클을 추종하는 시뮬 레이션을 수행하였다. 결과적으로 슬립제어가 적용된 차량의 경우 상대적으로 바퀴의 과도한 슬립 발생이 억제되면서 안정적으로 목표속도 주행이 가능한 것을 확인할 수 있었다.
이와 같은 시뮬레이션 결과를 바탕으로 차량의 주 행 환경이 가혹한 상황에 있을 때, 개발된 통합 제어 로직은 기존의 단순 제어 로직에 비해 상대적으로 안 정적인 차량의 운전이 가능한 것을 확인할 수 있었다.
후 기
본 논문은 지식경제부 기술혁신사업(No.10035411) 및 정부(미래창조과학부)의 재원으로 한국연구재단의 지원을 받아 수행된 기초연구사업(No.2009-0083495)
의 일환으로 수행되었습니다.
References