Copyright
Ⓒ2016 KSAE / 140-14 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2016.24.1.099 Transactions of KSAE, Vol. 24, No. 1, pp.99-111 (2016)
인휠 독립 구동 전기 자동차의 구동 모터 통합 고장 진단 알고리즘
전 남 주1)․이 형 철*2)
한양대학교 전기공학과1)․한양대학교 전기생체공학부2)
Integrated Fault Diagnosis Algorithm for Driving Motor of In-wheel Independent Drive Electric Vehicle
Namju Jeon
1)
․Hyeongcheol Lee*2)
1)
Department of Electrical Engineering, Hanyang University, Seoul 04763, Korea
2)
Department of Electrical and Biomedical Engineering, Hanyang University, Seoul 04763, Korea (Received 12 October 2015 / Revised 22 October 2015 / Accepted 23 October 2015)
Abstract : This paper presents an integrated fault diagnosis algorithm for driving motor of In-wheel independent drive electric vehicle. Especially, this paper proposes a method that integrated the high level fault diagnosis and the low level fault diagnosis in order to improve a robustness and performance of the fault diagnosis system. The high level fault diagnosis is performed using the vehicle dynamics analysis and the low level fault diagnosis is carried using the motor system analysis. The validity of the high level fault diagnosis algorithms was verified through Carsim® and MATLAB/
Simulink® cosimulation and the low level fault diagnosis’s validity was shown by applying it to a MATLAB/ Simulink®
interior permanent magnet synchronous motor control system. Finally, this paper presents a fault diagnosis strategy by combining the high level fault diagnosis and the low level fault diagnosis.
Key words : High level fault diagnosis(상위 레벨 고장진단), Low level fault diagnosis(하위 레벨 고장진단), Integrated fault diagnosis(통합 고장진단), Residual(레지듀얼), Fault table(고장표), Fault detection flag(고장감지 플래그)
Nomenclature 1)
: vehicle mass
: vehicle sprung mass
: wheel base
: distance between mass center and axle
: sprung mass height
: vehicle tread
: longitudinal acceleration
: lateral acceleration
: lateral weight-shift distribution on the front wheel
*
Corresponding author, E-mail: [email protected]
: lateral weight-shift distribution on the rear wheel
: longitudinal force
: lateral force
: vertical force
Subscripts
: front left
: front right
: rear left
: rear right
전남주․이형철
1. 서 론
최근 국제 유가 상승과 환경 문제 등으로 인하여 전 세계적으로 연료전지차량 및 전기자동차 등 친 환경 차량 도입에 대해 활발히 연구 중에 있다. 이 중 인휠 독립 구동 방식 전기자동차는 차량 구동 모 터를 바퀴 안에 장착에 따른 시스템 효율 향상, 주행 성 향상 등의 이유로 각광받고 있다. 1,2)
하지만 인휠 독립 구동 방식 전기자동차는 구동 모터가 바퀴 안에 장착되면서 물리적 충격이나 급 격한 온도 습도 변화 등의 가혹한 환경에 노출되어 잦은 고장을 초래하기 때문에, 차량의 안전성을 위 해 구동 모터의 고장 진단 중요성이 높아지고 있다.
고장 진단 기법에는 크게 하드웨어 중복(hardware redundancy)과 해석적 중복(analytic redundancy)이 있다. 하드웨어 중복은 동일한 센서 또는 엑추에이 터를 사용하여 고장에 간단하게 대응을 할 수 있는 장점이 있지만 추가적인 비용을 지불해야 하고 공 간을 할당해야 하는 단점이 있다. 차량에서는 이러 한 방법 대신 시스템에 대한 정보와 시스템 동특성 을 고려한 해석적 중복을 일반적으로 사용한다. 본 연구에서도 추가적인 센서 없이 해석적 중복을 통 해 고장 진단하고자 한다. 3)
차량 구동 모터의 고장 진단에 관련해서 다양한 연구들이 진행되고 있다. 한 연구에서는 센서리스 제어기법을 이용하여 모터의 위치 센서값을 추정하 고 이를 실제 센서값과 비교하여 고장 진단 및 허용 하는 연구가 있었으며 4,5) , 패리티 방정식을 이용하 여 전류센서와 위치센서의 고장 진단하는 연구가 있었다. 6) 다른 연구에서는 모터의 슬롯 수, 코일 배 치 등의 최적 설계를 통한 신뢰성 향상과 고장 허용 하는 연구가 있었다. 7,8) 또 다른 연구에서는 모터 시 스템 구동 드라이브의 스위치 고장과 추가 회로 구 성을 통한 레조버/인코더 및 전류 센서 고장검출 및 허용하는 연구도 있었고, 9-11) 차량 정차 상황에서 전 류의 주파수 해석을 통한 고장 진단 연구 등이 있었 다. 12) 이와 같이 차량용 구동 모터 고장 진단 연구는 주로 시스템 하위레벨에서 이루어지고 있고, 이런 하위레벨 고장 진단은 센서들의 고장진단에는 용이 하지만 차량 외부로부터 전달되는 Load 토크 같은 외란을 알 수 없기 때문에 엑추에이터 고장 진단에
는 어려움이 있다. 또한 단일 모델에 의한 고장 검출 및 진단은 외부 잡음 및 시스템의 불확실성에도 민 감하게 반응하여 오감지(fault alarm)를 할 수 있기
때문에, 13,14) 강인성을 높이기 위해서는 추가적인 상
위레벨 고장 진단이 필요하다. 15)
이에 본 연구에서는 차량의 구동 모터를 상위 레 벨의 차량동역학 관점 고장 진단과 하위 레벨의 모 터 시스템 관점 고장 진단을 통합하여 고장 분석함 으로써 시스템의 강인성과 안정성을 증가시키는 방 법을 제안하고자 한다.
상위 레벨의 차량동역학 관점 고장 진단은 평면 Two track 비선형 모델을 선정하고, 비선형 Tire model을 이용하여 longitudinal force와 lateral force를 계산한다. 모터 구동 토크, 각 휠속도를 이용하여 wheel dynamics를 구성하고 레지듀얼을 설정한다.
시스템의 redundancy를 확보하기 위해, 차량 동역학 관점에서 센서와 레지듀얼 상관 관계 분석하여 각 휠의 구동 모터 시스템의 고장을 검출 및 분리하고 자 한다. 하위 레벨의 모터 시스템 관점 고장 진단은 IPMSM의 상태 방정식을 구성하여 전류센서, 위치 센서의 고장을 검출 및 분리 한다. 최종적으로 상위 레벨 고장 진단과 하위레벨 고장 진단을 이중적 고 장 감시 구조를 마련함으로써 고장진단의 강인성과 안정성을 높였으며 발생된 고장에 대한 세부적인 분류를 가능하게 하였다.
이 논문의 구성은 다음과 같다. 2장에서는 상위레 벨의 차량동역학 관점 고장 진단을 제시하고 Carsim Ⓡ 과 Matlab/Simulink Ⓡ co-simulation을 통해 알고리즘 의 유효성을 보였다. 3장에서는 하위레벨의 모터시 스템 관점 고장진단 방법을 제시하고, Matlab/Simu- link Ⓡ 모터 시스템 예제를 이용한 시뮬레이션을 통 해 알고리즘의 유효성을 검증하였다. 4장에서는 상 위레벨 고장 진단과 하위레벨 고장 진단 방법을 통 합하여 구체적인 감지 및 진단 방법을 제안하였다.
2. 상위레벨 고장 진단
상위 레벨의 차량동역학 관점 고장 진단을 위해
각 휠에 종방향, 횡방향 힘을 구현할 수 있는 평면
Two track 비선형 모델을 사용하고, 구동모터 고장
이 전체 차량에 어떻게 영향을 미치는지 분석하여
인휠 독립 구동 전기 자동차의 구동 모터 통합 고장 진단 알고리즘
각 센서와 최종적으로 구현된 레지듀얼 사이의 상 관 관계를 도출하였다.
2.1 평면 Two Track 비선형 모델
자동차 각 휠에 종방향 횡방향 힘이 도시된 평면 Two track 비선형 모델을 Fig. 1과 같이 나타낼 수 있 다. 무게 중심을 기준으로 한 좌표계에서 다양한 Two track 비선형 모델의 동역학이 제안 되고 있지
만, 16,17) 본 연구에서는 다음과 같은 종방향, 횡방향
그리고 요우 방향 운동방정식을 이용하고자 한다.
⋅
cos
sin
(1)
⋅
sin
cos
(2)
cos
sin
sin cos
(3)
Fig. 1 Plane two track model
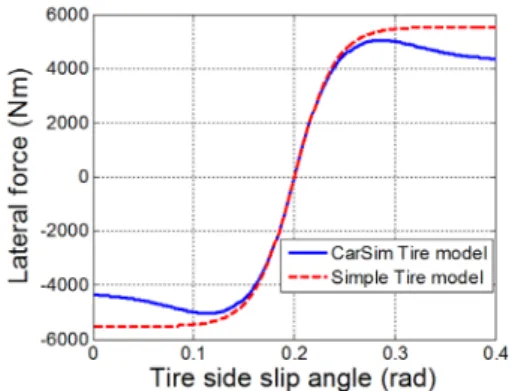
2.2 비선형 단순 타이어 모델
본 연구에서는 Two track 모델의 종방향 힘과 횡
방향 힘을 계산하기 위해, 선형구간과 비선형 구간 을 실제와 비슷하게 모사하면서 비교적 튜닝이 간 단한 비선형 단순 타이어 모델을 사용한다.
비선형 단순 타이어 모델은 tanh을 이용하여 구현 되며, 종방향 힘, 횡방향 힘에 대한 수식은 다음과 같다.
tanh (4)
tanh (5) 이때, 는 튜닝 인자이며 와 는 각각 종 방향 슬립, 타이어 사이드 슬립각이다.
각 휠의 종방향 슬립과 타이어 사이드 슬립각은 다음과 같다.
(6)
(7)
그리고 수직 방향 힘 는 종방향, 횡방향 가속도 를 이용하여 하중 이동을 표현하였다. 이에 대한 식 은 다음과 같다. 18)
(8)
Fig. 2는 Carsim Ⓡ 의 타이어 모델과 식 (5)의 단순 타이어 모델을 비교한 것이다.
2.3 휠 동역학
모터 구동 토크, 각 휠속도를 이용하여 휠 동역학
을 구현하면 다음과 같다.
Namju Jeon․Hyeongcheol Lee
Fig. 2 Comparison of a simple tire model with the carsim tire model
(9)
여기서 는 휠속도, 은 모터 구동 토크,
은 구름 저항, 는 유효구름반경, 는 타이어 관 성 모멘트이다.
2.4 레지듀얼
고장 진단 대상 이 포함된 휠 동역학을 레지듀 얼로 구성하면 다음과 같다.
(10)
은 실제 구하기 힘들지만, 구동 모터 상황에 서는 다른 성분에 비해 그 크기가 작기 때문에 추후 고장 진단할 때 레지듀얼 임계값을 이용하면 해결 가능하다.
2.5 종방향 힘 추정
레지듀얼 식 (10)을 보면 모델로부터 계산된 를 이용하게 된다. 하지만 실제 의 선형 구간에서 의 기울기는 노면마다 모두 다르기 때문에 정확한 값을 구하기는 쉽지 않다. 이에 종방향 동역학과 비 선형 단순 타이어 모델을 이용하여 의 선형 구간 에서의 기울기 변수 를 추정하여 좀더 정확한 를 계산 하고자 한다.
여기서 구동 시에는 각 휠의 종방향 슬립의 부호가 같고, 종방향 힘이 횡방향 힘보다 크다고 가정하였다.
횡방향 힘을 무시한 종방향 동역학 수식을 전개 하면 다음과 같다.
cos
⋅ (11)
식 (11)의 을 비선형 단순 타이어 모델을 이 용하여 전개하면 다음과 같다.
⋅
tanh cos
tanh cos
tanh
tanh
(12)
의 선형 구간에서의 기울기 변수 는 식 (12) 를 변형하여 다음과 같이 나타낼 수 있다.
tanh cos
tanh cos
tanh
tanh
⋅
(13)
이렇게 구한 를 통해 좀 더 정확한 종방향 힘 추 정이 가능하여 레지듀얼의 고장진단 정확성을 높일 수 있다.
tanh
(14)
2.6 각 센서와 레지듀얼 상관 관계 분석
이제 고장 진단 알고리즘을 구성하고 고장 분리 가능성 확인을 위해 각 센서와 레지듀얼 상관 관계 를 분석하고자 한다.
앞서 종방향 힘 추정을 위해 사용된 센서정보를 표현하면 다음과 같다.
(15)
식 (15)의 는 식 (2)와 식 (5)를 이용하여 구하고,
는 식 (8)을 이용하여 구한다. 이를 표현하면 다음 과 같다.
(16)
(17)
(18)
Integrated Fault Diagnosis Algorithm for Driving Motor of In-wheel Independent Drive Electric Vehicle
최종적으로 식 (10)을 각 센서와 레지듀얼 상관관 계를 정리하면 다음과 같다.
(19)
위의 레지듀얼은 각 휠마다 독립적으로 구성할 수 있으며, 이를 표로 표현하면 다음과 같다.
Table 1 Fault table of high-level fault diagnosis residual
X X X X X X X
X X X X X X X
X X X X X X X
X X X X X X XTable 1의 ‘X’는 레지듀얼 ∼ 와 각 센서 고장과의 연관성을 의미한다. 즉 다른 센서 정보들 이 정상이라고 가정했을 때, 각 휠의 구동 모터 의 고장을 검출 및 분리 할 수 있다.
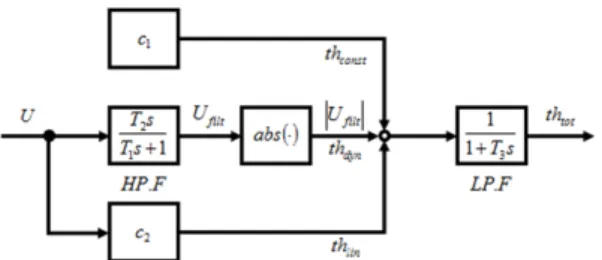
2.7 적응형 임계값
본 논문에서 사용한 차량 모델과 타이어 모델은 정상 상태에서는 실제모델과 거동이 비슷하나 과 도상태에서는 모델 부정확성이 커지게 된다. 따라 서 모델 부정확성을 포함한 모델로 설계한 레지듀 얼은 고장이 존재하지 않더라도 0에서 벗어난 값으 로 나타난다. 이러한 레지듀얼 편차는 입력 신호의 크기와 주파수의 영향을 받게 된다. 그러므로 모델 부정확성에 강인한 고장 진단 알고리즘을 구현하 기 위하여 적응형 임계값 기법을 사용하였다. Fig. 3 은 입력에 따른 적응형 임계값 생성의 예를 보여준 다. 19)
Fig. 3 Structure of the adaptive threshold generator19)
적응형 임계값은 상수 임계값 , 입력 크기에 비례하는 임계값 그리고 입력의 고주파값을 표현하기 위해 하이패스 필터를 사용한 임계값
의 합으로 구성되고, 로 우패스 필터를 사용하여 최종 적응형 임계값의 변 화를 부드럽게 하였다. 이때의 시상수 과 는 대 상 시스템의 시상수의 의해서 결정되고, 는 동역학 모델의 부정확성에 의해 결정된다.
2.8 시뮬레이션 결과
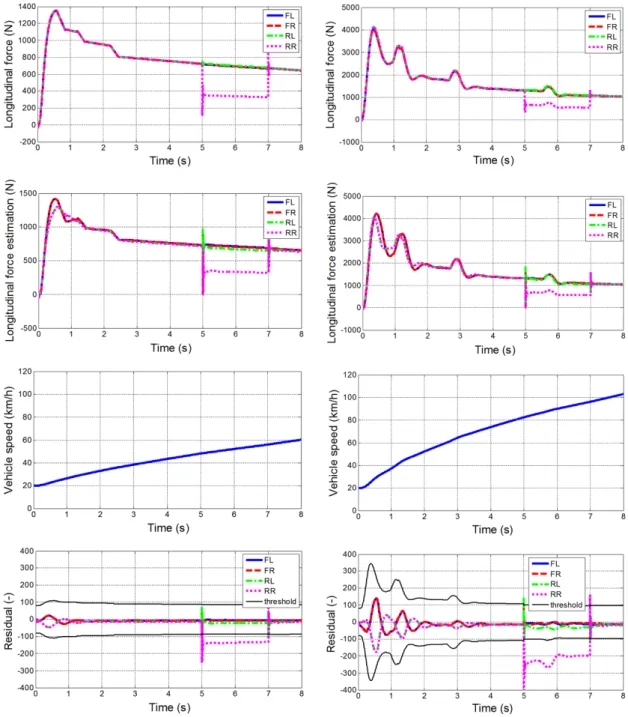
제안된 고장 진단 알고리즘을 검증하기 위해 Carsim Ⓡ 과 Matlab/Simulink Ⓡ 를 사용하였다. 차량의 모델은 Carsim Ⓡ 제공 차량 모델 중 ‘E-Class sedan’을 대상으로 하였다. 시뮬레이션 조건은 차속 20 km/h 에서 throttle을 일정한 값 (0.2, 0.5)으로 직진 주행으 로 설정하였다.
이 때 고장 신호는 5초에서 7초까지 인가하였으 며, 고장 신호는 오른쪽 뒷바퀴 (RR) 휠구동 모터 토 크의 성능저하 30 % 감소가 되도록 구현하였다.
Fig. 4와 Fig. 5의 시뮬레이션 결과를 통해 단순 타 이어 모델과 종방향 힘 방정식을 이용한 각 휠의 종 방향 힘 추정값이 실제 Carsim Ⓡ 값과 거의 차이가 없음을 확인하였으며, 종방향 휠 슬립이 커짐에 따 라 레지듀얼의 크기도 커지고 그에 따라 임계값의 크기도 크게 설정하여 강인성이 있음을 확인하였 다. 5초에서 7초까지의 고장 인가에 따른 고장 진단 결과도 고장 분리함을 볼 수 있다.
3. 하위레벨 고장 진단
전기자동차 구동용 모터는 운전 특성을 고려하여
구조적 강건성, 높은 출력 및 토크 밀도, 넓은 운전
속도영역, 우수한 내환경성(내진, 내열, 내부식), 고
효율 운전 제어성 등의 다양한 성능사양을 만족해
야 한다. 이와 같은 특징에 부합하는 모터로는
IPMSM (Interior Permanent Magnet Synchronous
Motor)이 있다. 이 IPMSM은 영구자석이 회전자 내
부에 매입된 구조로 외어 있어 구조적으로 안정성
이 크며, 자기적 돌극성이 좋아 넓은 속도 영역 운전
을 위한 약계자 제어성을 갖추고 있으며, 출력, 토크
전남주․이형철
Fig. 4 Simulation result (Initial speed 20 km/h, throttle=0.2 acceleration)
Fig. 5 Simulation result (Initial speed 20 km/h, throttle=0.5 acceleration)
밀도가 우수하여 고효율 운전이 가능하다. 20,21) 이에 본 연구에서 IPMSM을 인휠 독립 구동 방식 전기자 동차의 구동 모터로 선정하고 이를 고장 진단하고 자 한다.
3.1 IPMSM 모델
Fig. 6은 IPMSM의 d-q축 등가회로를 나타내며,
식 (20)은 IPMSM의 d-q축 회전 좌표계의 전압방정
식을 나타낸다.
인휠 독립 구동 전기 자동차의 구동 모터 통합 고장 진단 알고리즘
Fig. 6 D-q equivalent circuit for IPMSM
(20)
여기서 는 d-q축 입력전압이고, 는 d-q축 전류, 는 로터 속도, 은 전기자 권선 저항, 는 d-q축 인덕턴스, 그리고 은 자속 밀도이다.
식 (21)은 3상 고정 좌표계를 2상 회전 좌표계로 바꾸는 변환식이다.
sin cos cos sin
(21)
3상 모터 시스템에서는 많은 경우 비용 문제로 3 상 전류 센서가 아니라 2상 전류 센서를 사용한다.
모터 전류 평형식 을 이용하여 식 (21) 에서 항을 지우면 다음과 같다.
sin cos cos sin
(22)
3.2 전류 및 위치 센서 고장 진단
IPMSM의 전류 및 위치 센서 고장은 parity equation 22) 을 이용하여 고장 진단할 수 있다. 패리티 방정식을 구성하기 위한 상태 공간 방정식은 식 (23)과 같다.
(23)
where ∈ : the state vector, ∈ : the vector of measured input signals, ∈ : the vector of measured plant output signals, ∈
∈
: the vectors of unknown input signals, : the faults one wishes th detect, : unknown disturbances
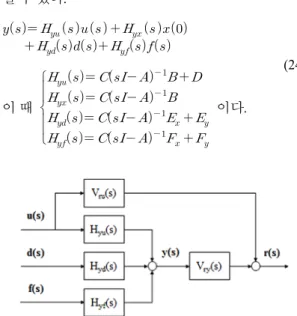
식 (23)을 전달함수로 나타내면 다음과 같이 표현
할 수 있다.
이 때
이다.
Fig. 7 Structure of residual generator using parity equation
위의 Fig. 7의 레지듀얼을 식 (24)를 이용하여 수 식으로 표현하면 식 (25)와 같다.
고장신호에만 영향을 받으며 레지듀얼을 만들기 위해서는 와 의 계수들을 0으로 만들어야 한다. 이를 위하여 다음과 같은 식 (26)을 만족시키 는 와 를 구해야 한다.
(26)
이제 위의 방법론을 IPMSM에 적용하면, 식 (23) 의 상태 공간 방정식은 다음과 같이 표현 할 수 있다.
(25) (24)
(27)
(28)
Namju Jeon․Hyeongcheol Lee
sin cos
cos sin
sin cos
cos sin
여기서는 센서의 고장만 고려하고( ), 외란 이 작다고 가정하였다 ( ).
를 슈도 상수(pseudo constant)로 간주하고 23) , 식 (26)의 와 을 구하기 위해 와
를 구하면 다음과 같다.
sin cos
cos sin
이때 이다.
이제 식 (28)의 와 를 이용하여 식 (26)의 와 을 구하면 다음과 같다.
(29)
이제 식 (29)를 이용하여 식 (25)의 레지듀얼을 도 출하면 다음과 같다.
(30)
이때
sin cos
cos sin
이다.
이제 레지듀얼이 a,b상의 전류센서 고장에 대해 독립적으로 분리할 수 있도록 좌표 변환을 하면 다 음과 같다.
′
(31)
식 (31)을 통해, 레지듀얼 와 는 전류센서 고 장
와
에 독립적으로 영향을 받음을 확인할 수 있다.
위의 고장 진단 알고리즘은 전류센서의 고장만을 고려한 것이기 때문에, 식 (31)의 레지듀얼의 위치 센서에 대한 고장 분리 가능성을 확인을 위해 각 센 서와 레지듀얼 상관관계를 분석하고자 한다.
식 (30)과 식 (31)을 통해 와 에 영향을 주는 센 서 정보를 다음과 같이 표현할 수 있다.
(32)
(33) 위의 레지듀얼을 고장표로 표현하면 다음과 같다.
Table 2 Fault table of low-level fault diagnosis residual
X X X X
X X X XTable 2의 ‘X’는 레지듀얼 와 각 센서 고 장과의 연관성을 의미한다. 즉 고장이 한곳에서만 발생한다고 가정하면, 와 를 통해 전류센서 , 와 위치 센서 의 고장을 분리 가능함을 보여주고 있다.
3.3 시뮬레이션 결과
제안된 알고리즘은 Matlab/Simulink Ⓡ 을 이용하여 구현하였다. IPMSM 제어시스템 모델은 Matlab/
Simulink Ⓡ 예제 중 AC6 - 100 kW Interior Permanent Magnet Synchronous Motor Drive 선정하였다. 이 예 제의 모터 모델 파라미터는 Table 3과 같다.
Fig. 8은 각 센서에 대한 고장 지령을 의미 한다.
고장 신호는 0.5초부터 0.7초까지 a상 전류 센서에
100A offset 고장이 인가하였으며, 1초부터 1.2초까
Integrated Fault Diagnosis Algorithm for Driving Motor of In-wheel Independent Drive Electric Vehicle
Table 3 IPMSM model parameter
Parameter Name Value (Unit)
Stator resistance ( ) 8.296 (
Ω
) d-axis stator inductance () 0.174 (
) q-axis stator inductance () 0.293 (Ω
) Magnet flux linkage (
) 71.115 (
⋅
)Inertia ( ) 0.089 (
⋅
) Viscous damping ( ) 0.005 (⋅
)Pole pairs (
) 4Fig. 8 Structure of residual generator using parity equation
지 b상 전류 센서의 gain값이 두배가 되도록 설정하 였으며, 1.5초부터 1.7초까지 위치센서에 0.1 rad offset 고장을 인가하였다.
Fig. 9는 Reference Torque에 따른 IPMSM 제어 시 스템의 Electromagnetic Torque를 나타낸 것이다.
Fig. 10은 IPMSM 제어 시스템의 d-q축 입력 전압 들을 나타낸 것이다.
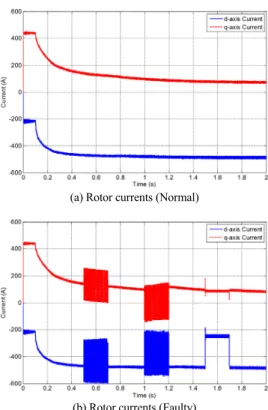
Fig. 11은 IPMSM 제어 시스템의 d-q축 전류들을 나타낸다.
위의 시뮬레이션 결과를 보면 전류 센서 및 위치 센서에 고장이 발생한 경우 Electromagnetic Torque 및 입력전압, 전류에 영향을 받는 것을 볼 수 있다.
이처럼 제어 시스템의 경우 한 부분의 고장이 다른 부분에 영향을 미치는 것을 확인할 수 있다.
Fig. 12는 고장 상황에서 제안 알고리즘의 , 를 나타낸다.
Fig. 12를 보면 Table 2의 고장표처럼 a상 전류센 서 고장일 때는 이 0에서 크게 벗어나고, b상 전류 센서 고장일 때는 가 0에서 크게 벗어나는 것을 확
(a) Output torque (Normal)
(b) Output torque (Faulty)
Fig. 9 Torque control simulation results (Output torque)
(a) Rotor voltages (Normal)
(b) Rotor voltages (faulty)
Fig. 10 Torque control simulation results (Input voltage)
전남주․이형철
(a) Rotor currents (Normal)
(b) Rotor currents (Faulty)
Fig. 11 Torque control simulation results (Rotor currents)
(a) Residual ( )
(b) Residual ( )
Fig. 12 Torque control simulation results (Residual)
인할 수 있으며, 위치센서 고장일 때는 , 둘 다 0 에서 크게 벗어나는 것을 확인할 수 있다. 만약 single fault만 발생한다고 가정하면, , 레지듀얼 을 통해 a상, b상 전류센서와 위치센서의 고장을 검 출 및 분리 할 수 있다.
4. 통합 고장 진단 알고리즘 전략 최종적인 통합 고장진단의 목적은 상위레벨 고장 진단과 하위레벨 고장진단의 이중 감시를 통하여 고장요소를 세부적으로 분류하고, 시스템 성능 분 석을 통하여 고장을 강인하게 구별하는데 있다. 하 위레벨 고장 진단은 개별 시스템의 고장 대상을 직 접 정의하고 독립적으로 레지듀얼을 발생시켜 감시 함에 따라 고장 발생을 즉각적이고 세부적으로 인 지할 수 있지만, 외부 잡음 및 시스템의 불확실성에 의해 오감지(false alram)를 발생시킬 수 있다. 이러 한 오감지를 방지하기 위해서 상위레벨 고장진단을 통하여 시스템 제어 성능을 분석하고, 하위레벨 고 장진단을 통하여 고장 요소를 세부적으로 분류하고 자 한다.
상위 레벨 고장 진단에서의 레지듀얼 식 (19)와 하위 레벨 고장 진단에서의 레지듀얼 식 (32)와 식 (33)을 이용하여 고장감지 플래그를 다음과 같이 정 의할 수 있다.
i f
i f
i f
i f
(34)
i f
i f
i f
i f
(35)
인휠 독립 구동 전기 자동차의 구동 모터 통합 고장 진단 알고리즘
i f
i f
i f
i f
(36)
여기서 는 고장 감지를 위한 임계값을 의미하며 센서나 엑츄에이터에 따라 그 값이 달라진다. ,
( )는 각 바퀴 구동 모터의 전류센서, 위치센서 검출을 위한 레지듀얼 이다. 는 상위 레벨 고장 진단의 고장감지 플 래그를 나타내며, , 는 하위 레벨 고장 진단의 고장감지 플래그를 나타낸다. 고장감지 플 래그들은 식 (34) ~ (36)에서 각각의 레지듀얼들이 임계값을 넘으면 1이 되고 그렇지 않으면 0으로 표 현된다.
최종적으로 In-wheel Independent Drive Electric Vehicle 구동 모터의 상위 레벨 고장 진단과 하위 레 벨 고장 진단을 통합한 통합 고장 진단(integrated fault diagnosis) 표를 작성하면 다음과 같다.
Table 4는 통합 고장 진단이 상위 레벨 고장 진단 의 고장 플래그와 하위 레벨 고장진단 플래그를 동 시에 관측하여 최종적으로 고장을 진단함을 나타낸 다. 상위 레벨 고장 진단 고장 감지 플래그 가 1 일 때는 최종적으로 고장이 진단된 상태이며, 이에 해당하는 하위레벨 고장 진단 고장 감지 플래그
와 를 통해 세부적인 고장을 알 수 있 다. 가 0이고 또는 이 1일 때는, 전체적인 시스템이 성능 저하가 없기 때문에 fault tolerable 하다고 판단한다. 즉, 시스템 shut down 또 는 system reconfiguration을 할 필요가 없다. 이는 예 상치 못한 센서 잡음이나 외란이 하위 레벨 고장 진 단에 false alarm을 일으킬 수 있기 때문이다. 반대로
이 1이고 그리고 이 0일 때는, 하 위 레벨 고장 진단에서 정의되지 않은 대상에 이상 이 발생하였음을 나타내며, 이러한 경우에도 상위 레벨 고장진단에 의하여 위험요소를 인지할 수 있 음을 알 수 있다. 이와 같은 통합 고장 진단 방법은
Table 4 Fault table of integrated fault diagnosis residual Low-level
fault diagnosis
High-level
fault diagnosis fault isolation
and
FL Motor
Current sensor
and
Current sensor
and
Position sensor
and
FR Motor
Current sensor
and
Current sensor
and
Position sensor
and
RL Motor
Current sensor
and
Current sensor
and
Position sensor
and
RR Motor
Current sensor
and
Current sensor
and
Position sensor
and
Intolerable and not isolatable
or
Tolerable and isolatable상위 레벨 고장 진단과 하위 레벨 고장 진단의 이중 적 고장 감시 구조를 마련함으로써 고장 진단의 강 인성과 안정성을 높일 수 있으며 발생되는 고장에 대한 더욱 세부적인 분류를 가능하게 한다.
5. 결 론
본 논문에서는 In-wheel 독립 구동 전기자동차 구
동 모터에 대해 상위레벨의 차량 동역학 관점 고장
진단과 하위레벨의 모터 시스템 관점 고장 진단을
제안하였고, 이를 시뮬레이션을 통하여 알고리즘의
유용성을 확인하였다. 또한 위 두 가지 방법을 통합
Namju Jeon․Hyeongcheol Lee
적으로 수행하는 통합 고장 진단 알고리즘을 제시 하여 오감지(false alram)을 방지할 수 있는 강인성을 확보하고, 발생된 고장에 대하여 더욱 세부적으로 분류할 수 있도록 하였다. 이러한 통합 고장 진단 방 법은 In-wheel 독립 구동 전기자동차의 구동 모터뿐 만 아니라 다른 서브시스템에도 적용 및 확장이 가 능하며, 전기자동차 시스템의 강인성과 안정성을 발전시킬 수 있을 것으로 생각된다.
후 기
본 연구는 지식경제부 산업원천기술개발사업
“주행 안전성 향상을 위한 소형자동차용 지능형 부하 분산 전동통합샤시 시스템 개발(10040220)” 과제와 미래창조과학부 및 정보통신기술진흥센터의 ICT 융합고급인력과정지원사업의 연구결과로 수행되 었음(IITP-2015-H8601-15-1005).
References
1) Y. Hori, Y. Toyoda and Y. Tsuruoka, “Traction Control of Electric Vehicle: Basic Experimen- tal Results Using the Test EV ‘UOT Electric March’,” IEEE Trans. Ind. Appl., Vol.34, Issue 5, pp.1131-1138, 1998.
2) Y. Hori, “Future Vehicle Driven by Electricity and Control-research on Four-wheel-motored,
‘UOT Electric March II’,” IEEE Trans. Ind.
Electron., Vol.51, Issue 5, pp.954-962, 2004.
3) E. Y. Chow and A. S. Willsky, “Analytical Redundancy and the Design of Robust Failure Detection Systems,” Automatic Control, IEEE Transactions on, Vol.29, Issue 7, pp.603-614, 1984.
4) M. E. H. Benbouzid, D. Diallo and M. Zeraoulia,
“Advanced Fault-tolerant Control of Induction- motor Drives for EV/HEV Traction Applications:
From Conventional to Modern and Intelligent Control Techniques,” IEEE Transactions on Ve- hicular Technology, Vol.56, Issue 2, pp.519-528, 2007.
5) B. Akin, S. B. Ozturk, H. Toliyat and M. Rayner,
“DSP-based Sensorless Electric Motor Fault- diagnosis Tools for Electric and Hybrid Electric
Vehicle Powertrain Applications,” IEEE Trans- actions on Vehicular Technology, Vol.58, Issue 5, pp.2150-2159, 2009.
6) B.-H. Lee, N.-J. Jeon and H.-C. Lee, “Current Sensor Fault Detection and Isolation of the Driving Motor for an In-wheel Motor Drive Vehicle International Conference on Control, Automation and Systems (ICCAS 2011),” 2011 11th International Conference (ICCAS), pp.486- 491, 2011.
7) D. Diallo, M. E. H. Benbouzid and A. Makouf,
“A Fault-tolerant Control Architecture for Induc- tion Motor Drives in Automotive Applications,”
IEEE Transactions on Vehicular Technolygy, Vol.53, Issue 6, pp.1847-1855, 2004.
8) C. J. Ifedi, B. C. Mecrow, S. T. Brockway, G.
S. Boast, G. J. Atkinson and D. Kostic-Perovic,
“Fault-tolerant In-wheel Motor Topologies for High-performance Electric Vehicles,” IEEE Transactions on Industry Applications, Vol.49, Issue 3, pp.1249-1257, 2013.
9) Y.-S. Jeong, S.-K. Sul, S. E. Schulz and N. R.
Patel, “Fault Detection and Fault-tolerant Con- trol of Interior Permanent-magnet Motor Drive System for Electric Vehicle,” IEEE Transac- tions on Industry Applications, Vol.41, Issue 1, pp.46-51, 2005.
10) B.-G. Park, K.-J. Lee, R.-Y. Kim, T.-S. Kim, J.-S. Ryu and D.-S. Hyun, “Simple Fault Diag- nosis Based on Operating Characteristic of Brush- less Direct-current Motor Drives,” IEEE Trans.
Ind. Electron., Vol.58, Issue 5, pp.1586-1593, 2011.
11) M. Naidu, S. Gopalakrishnan and T. W. Nehl,
“Fault-tolerant Permanent Magnet Motor Drive Topologies for Automotive X-by-wire Systems,”
Industry Applications, IEEE Transactions on, Vol.46, Issue 2, pp.841-848, 2010.
12) L. Parsa and H. A. Toliyat, “Fault-tolerant Inte- rior-permanent-magnet Machines for Hybrid Electric Vehicle Applications,” Vehicular Tech- nology, IEEE Transactions on, Vol.56, Issue 4, pp.1546-1552, 2007.
13) X. Fang, J. Gertler, M. Kunwer, J. Heron and T.
Barkana, “A Double-threshold-testing Robust
Integrated Fault Diagnosis Algorithm for Driving Motor of In-wheel Independent Drive Electric Vehicle
Method for Fault Detection and Isolation in Dynamic Systems,” American Control Confer- ence, Vol.2, pp.1979-1983, 1994.
14) B. Song and J. K. Hedrick, “Fault Tolerant Nonlinear Control with Applications to an Auto- mated Transit Bus,” Vehicle System Dynamics, Vol.43, Issue 5, pp.331-350, 2005.
15) S. Kim, B. Song and H. Song, “Integrated Fault Detection and Diagnosis System for Longi- tudinal Control of an Autonomous All-terrain Vehicle (ATV),” Int. J. Automotive Technology, Vol.10, No.4, pp.505-512, 2009.
16) Q. Zhou, Y. Ai and H. Bao, “A Hybrid Vehicle Model for Advanced Cruise Control,” Procee- dings of the Intelligent Transportation Systems, IEEE, pp.1165-1170. 2003.
17) G. Kaiser, Q. Liu, C. Hoffmann, M. Korte and H. Werner, “Torque Vectoring for an Electric Vehicle Using an LPV Drive Controller and a Torque and Slip Limiter,” IEEE 51st Annual Conference(CDC), pp.5016-5021, 2012.
18) O. Mokhiamar and M. Abe, “How the Four
Wheels Should Share Forces in an Optimum Cooperative Chassis Control,” Control Enginee- ring Practice, Vol.14, No.3, pp.295-304, 2006.
19) R. Isermann, Fault-diagnosis Systems - An Introduction from Fault Detection to Fault Tole- rance, Springer, New York, pp.107-108, 2006.
20) W. L. Soong and N. Ertugrul, “Field-weakening Performance of Interior Permanent-magnet Motors,” Industry Applications, IEEE Trans- actions on, Vol.38, No.5, pp.1251-1258, 2002.
21) N. Bianchi and S. Bolognani, “Interior PM Synchronous Motor for High Performance App- lications,” Proceedings of the Power Conversion Conference, PCC-Osaka, pp.148-153, 2002.
22) M. Blanke and J. Schröder, Diagnosis and Fault-tolerant Control, Vol.2, Springer, Berlin, 2006.
23) A. M. Rahman and P. Zhou, “Analysis of Bru- shless Permanent Magnet Synchronous Motors,”
IEEE Trans. Ind. Electron., Vol.43, Issue 2, pp.
256-267, 1996.