1. 서 론
국제해사기구(IMO)에서는 에너지효율지수(EEDI), 에너지효율 지표(EEOI), 에너지효율관리계획(SEEMP)의 적용에 대한 논의를 주관 하고 있으며, 국제표준화기구(ISO)에서는 바람, 파도, 조류, 수심 등의 환경 조건을 고려하여 선박의 실제 운항 성능을 추정하는 절차 및 규정
을 갱신하고 있다 (Jung, 2011; Ball, et al., 2015; ISO, 2015).
에너지 효율성 측면에서 경제적인 선박의 설계를 요구하는 최근 의 흐름에 따라, 선박 저항성능 측면에서 최적화된 선형을 찾거나 운용 조건을 탐색하는 연구가 다양하게 이루어지고 있다. 대표적으 로 운항 자세의 변화에 따른 선박의 저항 변화를 비교하는 연구가 수행되었고 (Park, et al., 2013; Seo, et al., 2015), 운항 최적화 측면에서 모형시험 및 수치계산을 통해서 최적의 트림 조건을 찾는
실선계측 데이터 대체를 위한 AIS 및 ECMWF
데이터베이스 조합을 이용한 LNGC의 분당 회전수 및 동력 추정에 관한 타당성 연구
유영준1,†・김재한2・서민국3 대우조선해양(주)1
삼성디스플레이2
선박해양플랜트연구소3
A Feasibility Study on the RPM and Engine Power Estimation Based on the Combination of AIS and ECMWF Database to Replace the Full-scale Measurement
Youngjun You1,†・Jaehan Kim2・Min-Guk Seo3
Daewoo Shipbuilding and Marine Engineering Co., LTD. (DSME)1 Samsung display2
Korea Research Institute of Ships and Ocean Engineering (KRISO)3
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
In the previous research, a study was carried out to estimate the actual performance such as the propeller Revolution Per Minute (RPM) and engine power of a Liquefied Natural Gas Carrier (LNGC) using the full-scale measurement data. After the predicted RPM and engine power were verified by comparing those with the measured values, the suggested method was regarded to be acceptable.
However, there was a limitation to apply the method on the prediction of the RPM and engine power of a ship. Since the information of route, speed, and environmental conditions required for estimating the RPM and engine power is generally regarded as the intellectual property of a shipping company, it is difficult to secure the information on a shipyard. In this paper, the RPM and engine power of the 151K LNGC was estimated using the combination of Automatic Identification System (AIS) and European Centre for Medium-Range Weather Forecasts (ECMWF) database in order to replace the full-scale measurement. The simulation approach, which was suggested in the previous research, was identically applied to the prediction of RPM and engine power. After the results based on the AIS and ECMWF database were compared with those obtained from the full-scale measurement data, the feasibility was briefly reviewed.
Keywords : Full-scale measurement(실선계측), AIS(선박 자동식별장치), ECMWF database(유럽 중기예보센터 데이터베이스), RPM (분당 회전수), Power(동력)
연구가 수행되었다 (Park & Kim, 2014; Sherbaz & Duan, 2014).
환경 정보를 고려한 실제 운항 성능 평가에 관한 절차 및 규정의 갱신에 대응하기 위하여, 바람, 조류, 파도 등의 환경 하중이 선박의 조종 운동에 미치는 영향을 고려하는 연구가 수행되기도 하였다 (Yoon & Rhee, 2001; Seo, et al., 2011; You, et al., 2017a).
또한, 실선 운항 시 추진기 성능의 변화를 계측하고, 분석하는 연구 가 수행되기도 하였다 (Song, et al., 2005; Choi, et al., 2011).
더 정확한 실제 운항 성능의 추정을 위해서는 선박의 설계자 료, 저항, 추진, 내항, 조종성능뿐만 아니라 실제 운항 경로, 운 항 해역의 바람, 파도, 조류 등의 환경 정보에 대한 계측 정보 등 다양한 정보가 종합적으로 고려되어야 한다. 하지만, 실제 운항 과 관련된 기록은 해운선사에서 지적 재산으로 엄격하게 보호하 고 있기 때문에, 조선소에서 관련 정보를 확보하여 초기 설계단 계부터 실선 성능 평가에 활용하기 어려운 실정이다.
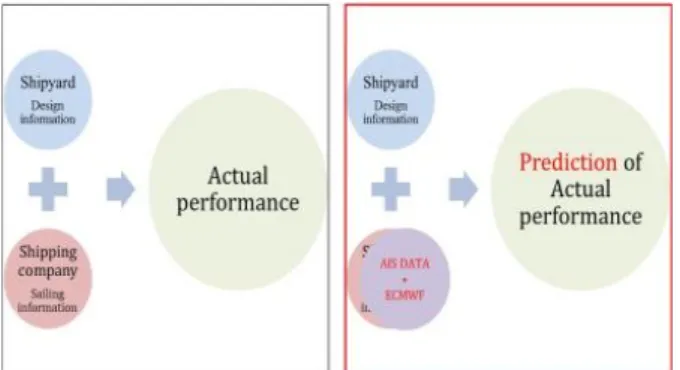
실선 계측 데이터를 기반으로 바람, 파도 등의 환경 하중을 고려 하여 계측된 기간에 운항하는 선박의 분당 회전수(RPM) 및 엔진 동력(power)을 추정하고, 검증하는 연구가 수행되기도 하였다 (You, et al., 2018). 이 연구는 Fig.1의 왼쪽에서 보는 것처럼, 조선 소에서 확보 가능한 설계자료 및 저항, 추진, 내항, 조종 등의 성능 정보에 해운선사에서 제공한 실선 계측 데이터를 결합하여 실선 운 항 성능을 추정하고, 실선 계측 정보와 비교 검증을 한 것이다. 이보 다 먼저, 실선 계측 데이터를 선박 자동식별장치(AIS) 데이터로 대 체하여, 선박의 운항 성능을 추정하는 연구가 수행되기도 하였다 (You, et al., 2017b; You, et al., 2017c). 이 연구는 Fig. 1의 오른쪽에서 보는 것처럼, 조선소에서 확보하기 어려운 실선 계측 데이터를 선박 자동식별장치 데이터로 대체하려는 시도였다. 하지 만 선박 자동식별장치를 통해서는 바람 및 파도와 같은 환경 정보 를 얻을 수 없기 때문에, 추정된 동력에 정량적인 차이가 뚜렷하게 나타나는 한계가 있었다. 조선소가 보유한 설계자료, 모형시험, 계산 결과 등을 확보하지 못하는 학교, 연구소 등의 기관에서는 실선 계측 데이터만을 통계적으로 분석하는 연구를 수행하기도 하였다 (Yoo, et al., 2016a; Yoo, et al., 2016b).
본 연구는 실선 계측 데이터를 기반으로 선박의 분당 회전수 및 동력을 추정하고 검증했던 이전 연구의 후속 연구로서 (You, et al., 2018), 조선소에서 확보하기 어려운 실선 계측 데이터를 선박 자동식별장치에서 획득한 데이터와 유럽 중기예보센터
Fig. 1 Different approaches to predict actual performance of a ship
(ECMWF) 데이터베이스의 조합으로 대체함으로써, 신뢰할 수 있 는 수준의 실선 운항 성능 추정이 가능한지 검증하는 것을 목표 로 하였다. 이것은 Fig. 1의 오른쪽 그림에서 제안된 개념을 구 현하고, 검증하고자 하는 시도였다.
먼저, 이전 연구들과 같이 대우조선해양에서 건조한 단축 추 진 151K LNGC를 대상으로 연구를 수행하였다 (You, et al., 2017b; You, et al., 2017c; You, et al., 2018). 대우조선해양에 서 보유하고 있는 설계자료, 모형시험결과, 계산 결과를 이용하 여 대상 선박의 저항, 추진, 내항, 조종성능을 모두 고려할 수 있 었다. 이전 연구에서 활용되었던 동일한 시뮬레이션 방법과 성능 정보를 동일하게 이용하되, 실선 계측 데이터를 선박 자동식별장 치에서 획득한 데이터 및 유럽 중기예보센터 데이터베이스에서 획득한 환경 정보의 조합으로 대체한 것이다.
운항 시뮬레이션에 필요한 정보는 선박의 경위도 좌표, 대지 속도, 선박의 흘수, 바람의 속도, 바람의 방향, 유의 파고, 평균 파도 주기, 파도의 방향이다. 선박의 경위도 좌표, 대지속도, 선 박의 흘수 정보는 선박 자동식별장치를 통해 획득할 수 있고, 바 람의 속도, 바람의 방향, 유의 파고, 평균 파도 주기, 파도의 방 향은 유럽 중기예보센터 데이터베이스를 통해 획득할 수 있다.
언급된 정보를 이용하여 운항 시뮬레이션을 수행한 후, 실선 계 측된 경위도 좌표, 대지속도를 계산을 통해 추정한 경위도 좌표, 대지속도와 비교하였다. 또한, 14일 동안의 운항 과정에서 선체, 타, 바람, 파랑 하중의 크기를 상대적으로 비교함으로써, 각 요소가 운항 성능에 미치는 영향을 비교하였다. 또한, 유럽 중기예보센터 를 통해 획득한 환경 정보의 경우 지구 고정좌표계를 기준으로 표시 되는 것인데, 선박의 속도 및 선수각 등을 고려하여 선체 고정좌표 계를 기준으로 하는 상대 속도 및 상대 입사각으로 변환하였다. 변 환된 바람의 상대 속도, 바람의 상대 입사각을 실선 계측된 바람의 상대 속도, 바람의 상대 입사각과 비교함으로써 사용 가능성 및 차 이의 정도를 살펴보았다. 유의 파고, 변환된 파도의 상대 입사각 또한 실선 계측된 값들과 비교 검토하였다.
마지막으로 조합된 데이터를 이용하여 14일 동안 대상 선박이 운항하는 시뮬레이션을 통해 분당 회전수 및 동력을 추정하였는데, 그 결과를 이전 연구의 결과와 비교하였다. 환경 정보의 차이로 인 해 선박 자동식별장치 및 유럽 중기예보센터 데이터베이스를 이용 하여 계산된 값과 실선 계측 데이터를 기반으로 계산된 값에 정량적 인 차이가 발생함을 확인하였다. 이용하는 데이터에 따라 발생 가능 한 오차의 범위를 감안할 수 있다면 실선 계측 데이터를 대체하여 실선 운항 성능 추정에 이용할 수 있을 것으로 기대된다.
2. 대상 선박 및 조종 운동 방정식
2.1 대상 선박
본 연구에서는 단축 추진기를 갖는 151K LNGC를 대상으로 연구를 수행하였다 (You, et al., 2017b; You, et al., 2017c; You, et al., 2018). 수선 간 길이는 277.2 m, 폭은 43.4 m, 밸러스트
Fig. 2 The 151K LNGC (LNG IMO)
조건에서 흘수는 9.4 m이다. 대상 선박의 상세한 주요 제원은 이 전 연구에서 명시하였으며, 같은 선체, 추진기, 타에 대해서 연구 를 수행하였다. 대상 선박의 실제 운항 중 사진을 Fig. 2에서 보 여주고 있다.
2.2 좌표계
Fig. 3에서는 지구 고정좌표계 및 선체 고정좌표계를 보여주 고 있다. 저항, 추진, 내항, 조종, 환경 정보 등이 각각 다른 좌표 계를 기준으로 계산되기 때문에, 운항 시뮬레이션을 수행하기 위 하여 사용되는 기준 좌표계로 Fig. 3의 좌표계가 이용되었다. 유 럽 중기예보센터 데이터베이스에서는 바람, 파도 등의 정보가 지 구 고정좌표계를 기준으로 정의되는데, 조종운동방정식의 외력으 로 고려하기 위하여 선체 고정좌표계로 변환하였다.
Fig. 3 The coordinate system considering wind and waves (You, et al., 2018)
, , 는 지구 고정좌표계의 원점, 종 방방, 횡 방향 축계 를 의미한다. 는 위도, 는 경도를 가리킨다. 는 설치된 타의 타각을 의미한다. 는 선박의 속도를 의미한다. 는 선박의 지 구 고정좌표계에서의 선수각을 의미하며, 는 편류각을 의미한다.
는 바람의 속도, 는 바람의 방향, 는 파도의 방향을 각각 가리킨다. 는 선체에 입사되는 바람의 상대 속도,
는 바람의 상대 입사각, 는 파도의 상대 입사각을 가 리킨다.
지구를 구로 가정한 상태에서, 두 점 사이의 거리, 방위각, 한 점에서 임의의 방향과 거리를 이동했을 때 도착점의 좌표를 계산 할 필요가 있다 (Richardus & Adler, 1972). 식 (1), (2), (3)을 앞에서 언급한 각각의 목적에 맞게 이용하였다.
식 (1)에서 표기된 은 두 점 사이의 거리를 계산하는 데 있어서 시작점의 좌표를 가리키며, 는 도착점의 경위 도 좌표를 의미한다. ∆는 두 좌표 사이의 위도 차이를 가리키 며, ∆는 두 좌표 사이의 경도 차이를 가리킨다. 은 지구의 반지름인 6,371 를 가리킨다. 는 경위도로 표기된 두 점 사 이의 거리를 가리킨다. 는 방위각을 의미한다 (Richardus &
Adler, 1972).
sin∆ cos∙ cos∙ sin∆
∙ atana a
∙
(1)
atansin∆ ∙ cos
cos∙ sin sin∙ cos∙ cos∆
(2)
asin sin∙ cos cos
∙ sin ∙ cos
atansin ∙ sin ∙ cos cos sin∙ sin
(3)
2.3 조종 운동 방정식
2.3.1 선체, 추진기, 타
대상 선박의 조종 운동은 식 (4)를 이용하여 계산된다. 여기서
은 대상 선박의 질량, 는 대상 선박의 질량 관성모멘트를 의미한다. 는 대상 선박의 종 방향 속도와 횡 방향 속도를 각 각 가리키며, , 은 대상 선박의 속도 시간 변화율을 가리킨다.
은 대상 선박의 위치의 선체 중앙부를 중심으로 회전하 는 각속도를, 은 각속도의 시간 변화율을 가리킨다. , , 은 각각 선체에 작용하는 종 방향, 횡 방향 힘과 선수동요 모멘 트를 의미한다.
(4)
선체에 작용하는 힘과 모멘트는 식 (5)와 같이 각각의 성분으
로 나누어 정리할 수 있다. 하 첨자 H는 선체를 의미하며, P는 추진기, R은 타, WI는 바람, WA는 파도를 가리킨다.
(5)
선체, 타, 추진기에 작용하는 동유체력 수학모형은 이전 연구 에서 사용했던 것과 같은 수학모형을 이용했으며, 동일한 경험식 혹은 모형시험결과로부터 계수를 추정하였다. 따라서 자세한 설 명 및 검증과정은 생략하였다 (Kijima, et al., 1990; Fujii &
Tsuda, 1961; Fujii & Tsuda, 1962).
2.3.2 바람 하중
대상 선박에서는 탑재된 바람 센서를 이용하여 바람의 속도, 바람의 방향 등의 정보가 계측된다. 따라서 계측된 값은 선박의 속도, 선수각이 고려된 상대적인 값이다. 반면, 유럽 중기예보 센터 데이터베이스에서는 지구 고정좌표계를 기준으로 바람의 속도, 바람의 방향 등의 정보가 추정된다.
선박의 조종운동방정식에서 바람 하중을 구하기 위해서는 상 대 속도와 상대 입사각으로 정리되어야 하며, 식 (6)을 이용하 여 계산될 수 있다. 는 바람의 종 방향 상대 속도이고,
는 바람의 횡 방향 상대 속도를 가리킨다. 는 종 방향 상대 속도의 제곱과 횡 방향 상대 속도의 제곱을 더한 값을 제 곱근으로 계산한 값이며, 는 선체에 입사되는 상대 입사각 을 가리킨다.
cos
sin
tan
(6)
선체에 작용하는 바람 하중은 식 (7)을 이용하여 계산된다.
여기서, 은 무차원화 된 풍하중 계수를 가리킨다.
이전 연구에서 풍동시험결과와 흘수에 따른 풍압 면적을 정리 한 바 있다 (You, et al., 2018). 는 선박의 수선면 위쪽의 종 방향 투영면적을 가리키며, 은 횡 방향 투영면적을 가리 킨다. 는 공기의 밀도를 가리키며, 는 선박의 전체 길이 를 가리킨다.
′ ∙
∙ ∙∙
′ ∙
∙ ∙∙
′ ∙
∙ ∙∙∙
(7)
2.3.3 파랑 하중
파랑 하중은 식 (8)을 이용하여 계산되는데, 파랑 평균 표류력
만을 조종운동방정식에 파랑 하중으로 고려하였다. 여기서,
는 파랑 평균 표류력을 가리키며, 는 파도의 주파수, 는 파도의 입사각도, 는 파의 진폭을 가리킨다. 는 ITTC (International Towing Tank Committee) 파 스펙트럼을 의미한 다. 선박의 이동속도, 평균 파도 주기, 파도의 방향에 따라 선형 보간을 한 뒤 파랑 하중을 조종운동방정식에 외력으로 고려하였 다. 파랑 하중을 구하기 위한 상세한 절차와 가정은 이전 연구에 정리되어 있다 (You, et al., 2018).
∞
(8)
파랑 평균 표류력을 계산하기 위하여, BV 선급에서 제공하는 HYDROSTAR를 이용하였다. 0 부터 19 까지 모두 5 개의 속도를 밸러스트 조건에 대해서 계산하였으며, 0.2721
부터 1.0539 까지 29개의 파주파수에 맞추어 계산 하였다 (You, et al., 2018). 계산은 0 deg부터 180 deg까지 수 행하였으며, 180 deg부터 360 deg까지의 값은 대칭성을 고려 하여 추정하였다.
3. 시뮬레이션 방법 및 타당성 검토
3.1 시뮬레이션 절차
이전 연구에서 실선 계측 데이터를 기반으로 시뮬레이션을 수 행하는 과정을 순서도로 정리한 바 있다 (You, et al., 2018). 같 은 시뮬레이션 절차를 따르되, 각각의 계산이 실선 계측 데이터 로부터 수행되는지 선박 자동식별장치와 유럽 중기예보센터 데 이터베이스를 조합한 정보를 이용하는지만 다르기 때문에 별도 의 설명을 생략하였다.
3.2 AIS 및 ECMWF 데이터베이스 조합을 이용한 실선 계측 데이터의 대체
Table 1에서는 실선 계측 데이터 중에서 운항 시뮬레이션에 이용된 정보만을 선택적으로 정리한 것이다. 또한, 선박 자동식 별장치와 유럽 중기예보센터 데이터베이스를 통해 대체 가능한 지를 각각 정리하였다. 운항 시점의 시각, 선박의 경위도 좌표, 대지속도, 흘수 정보는 선박 자동식별장치 데이터를 통해 획득할 수 있다. 또한, 운항 시점과 경위도 좌표를 기준으로 바람의 속 도, 바람의 방향, 유의 파고, 평균 파도 주기, 파도의 방향은 유 럽 중기예보센터 데이터베이스를 통해 추정하는 것이 가능하다.
결과적으로 실선 계측 데이터를 통해서 획득했던 정보들을 선박 자동식별장치와 유럽 중기예보센터 데이터베이스를 통해 모두 대체 가능함을 알 수 있다.
Table 1 Type of Information acquired from full-scale measurement, AIS, and ECMWF database
Full-scale measurement
data
AIS ECMWF
database
Kinematic data
Time in UTC (universal time
coordinated) Ship's position (latitude, longitude) SOG(speed over ground)
Draft aft Draft fwd
Time in UTC Ship's position with
accuracy indication and
integrity SOG Ship's draft
-
Environme ntal data
Wind speed Wind direction
Hs(significant wave height) Tp(wave mean
period) Wave direction
-
Wind speed Wind direction
Hs Tp Wave direction
Table 2 Acquired data of the ship for Initial location and final location from AIS and ECMWF Device Data Initial data Final data
AIS
Time in UTC 2010.11.22 09:00
2010.12.06 09:00
Latitude 20.73 -24.89
Longitude 121.19 48.67
COG(course over
ground) 226.53 235.49
SOG 16.50 17.34
Draft Aft 9.77 9.80
Draft Fwd 8.34 8.02
ECMWF
Wind speed 13.60 9.14
Wind direction 38.40 358.30
Hs 1.50 1.61
Tm 7.10 7.80
Wave direction 35.90 91.60
대상 선박이 국제해사기구에서 부여받은 고유번호를 이용하 여, 선박 자동식별장치에서 대상 선박의 정보를 선택적으로 취득 할 수 있다. 선박 자동식별장치 정보는 2010년 11월 22일 9시부 터 2010년 12월 6일 09시 사이에 총 14일 동안의 값을 선택하 였다. 다만, 전체 운항 기간과 비교하면 매우 짧은 주기로 업데 이트되는 선박 자동식별장치 정보를 10분 간격으로 출력하여, 시 뮬레이션 및 결과 검증에 사용하였다. 선박 자동식별장치 및 유 럽 중기예보센터의 데이터 또한 10분 간격으로 출력하였다. 실선
계측 데이터를 기반으로 시뮬레이션을 수행했을 때 선박의 경위 도 좌표와 선속 정보는, 본 연구에서 이용된 선박 자동식별장치 정보와 같다. 이것은 선체 내부에서 위성항법 시스템(GPS) 장치 를 통해 계측한 경위도 좌표와 속도 정보를 선박자동식별 장치로 보냈기 때문이다. 따라서 본 연구에서 사용된 두 정보는 같다.
대상 선박은 14일 동안의 운항 기간에 대만 인근 해역에서부 터 말라카 해협을 통해 마다가스카르 인근 해역까지 운항하였다.
가장 큰 변침은 말라카 해협 입구와 출구에서 관찰되었으며, 나 머지 대부분의 경로에서는 직선 경로를 유지하고 있었다. 운항 시뮬레이션에 이용되는 시각, 선박의 경위도 좌표, 실제 침로, 대 지속도, 선박의 흘수 등의 정보와 유럽 중기예보센터 데이터베이 스를 통해 획득한 바람 및 파도와 관련된 정보 중 시작 시점과 종료 시점에 해당하는 정보를 Table 2에 정리하였다.
3.3 ECMWF 기상 데이터의 사용 가능성 검토
실선 계측 데이터 혹은 유럽 중기예보센터 데이터베이스를 통 해 확보한 환경 정보가 어떠한 특징을 갖는지 먼저 비교 검토 하 고자 하였다. 특히, 유럽 중기예보센터 데이터베이스는 6시간 단 위로 0.25˚ X 0.25˚ 크기의 격자에 따라 추정된 환경 정보를 제공 한다. 따라서 임의의 시점에 선박의 경위도 좌표를 기준으로 가 장 가까운 시간에, 가장 가까운 격자점에 해당하는 바람 및 파도 의 정보를 획득하였다. 실선 계측 데이터와 시공간의 차이가 있 을 수밖에 없기 때문에, 추정된 환경 정보가 실선 계측 값과 정 확하게 일치하지 않을 수 있다. 그 차이가 허용 가능한 수준인지 혹은 어느 정도 차이를 보이는지 확인하고자 하였다.
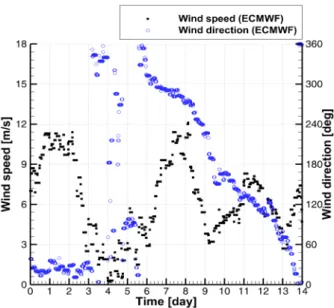
Fig. 4와 5는 유럽 중기예보센터 데이터베이스를 통해 획득한 바람 및 파도의 정보를 보여주고 있다. Fig. 4에서 사각형은 바 람의 속도를, 원은 지구 고정좌표계에서 바람의 방향을 가리킨 다. Fig. 5에서 사각형은 유의 파고를 원은 지구 고정좌표계에서 파도의 방향을 가리킨다.
Fig. 4 Time histories of the wind speed and wind direction obtained from ECMWF
Fig. 5 Time histories of the significant wave height and wave direction obtained from ECMWF
바람의 최고 속도는 약 12 m/s정도이다. 유의 파고는 말라카 해협 부근에서 매우 작은 값을 갖는 것을 제외하고는, 대부분 2.0 m 내외로 추정되었다. 바람 및 파도의 방향은 약 3~5일 차 에 매우 불규칙하게 나타났다.
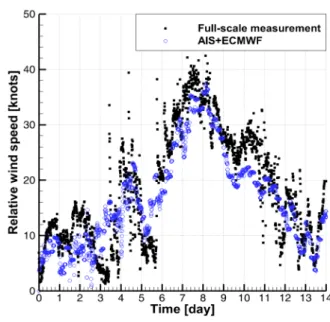
앞에서 설명했던 것처럼, 대상 선박에서 바람은 센서를 통해 선체 고정좌표계 상의 상대적인 값으로 계측되었다. 같은 축계를 기준으로 실선 계측 데이터와 유럽 중기예보센터 데이터베이스 추정된 값을 비교하기 위하여, 식 (6)을 이용하여 축계를 변환하 였고 그 결과는 Fig. 6과 Fig. 7에서 보여주고 있다.
Fig. 6에서 사각형은 실선 계측된 바람의 상대 속도를, 원은 유럽 중기예보센터 데이터베이스로부터 변환된 바람의 상대 속도를 각각 가리킨다. 두 값의 경향성이 대체로 일치하고 있는 것을 알 수 있다.
다만, 유럽 중기예보센터 데이터베이스로부터 변환된 바람의 상대 속도가 3~4일 차를 제외하고는 실선 계측 데이터보다 작게 추정되었 다. 흔들림으로 인해 정확하게 비교할 수는 없지만, 약 5 knots 내외의 차이를 꾸준하게 보인다. 또한, 실선 계측 데이터의 경우에 계측상의 잡신호로 추정되는 불규칙한 정점이 다수 관찰되고 있다.
Fig. 7에서 사각형은 실선 계측된 상대 입사각을, 원은 유럽 중기예 보센터 데이터베이스로부터 변환된 상대 입사각을 각각 가리킨다.
두 값의 경향성이 대체로 일치하고 있는 것을 알 수 있다. 다만, 실선 계측 데이터의 경우 3~6일 차, 8~9일 차, 13~14일 차에 바람의 상대 입사각이 매우 불규칙함을 알 수 있다. 실제 운항 중인 상태에서 여러 상부 구조물의 간섭을 받는 선박 내 계측 센서의 운용 특성상 바람 속도가 크지 않아 일정한 방향성이 유지되지 않은 것으로 생각된다. 대부분 일정한 방향성을 유지하는 구간에서 는 실선 계측 데이터와 변환된 데이터 간에 유사한 상대 입사각을 보여주고 있다.
파도 정보의 경우 실선 계측 데이터 및 유럽 중기예보센터 데 이터베이스 모두 지구 고정좌표계를 기준으로 제공되었기 때문 에, 별도의 변환 과정을 거치지 않고 두 데이터를 Fig. 8과 9에 서 직접 비교하였다.
Fig. 6 Time histories of the wind speed measured from the full-scale measurement and the wind speed converted from ECMWF database
Fig. 7 Time histories of the wind direction measured from the full-scale measurement and the wind direction converted from ECMWF database
Fig. 8에서 사각형은 실선 계측된 유의 파고를, 원은 유럽 중 기예보센터 데이터베이스로부터 추정된 유의 파고를 각각 가리 킨다. 두 값의 증감과 관련된 경향성은 대체로 일치하고 있으 나, 그 크기는 다소 차이가 있었다. 유럽 중기예보센터 데이터 베이스에서 추정된 유의 파고가 1~3일 차, 6~7일 차, 8~14일 차에 약 1m 정도의 더 작게 추정되었음을 알 수 있다.
Fig. 9에서 사각형은 지구 고정좌표계에서 실선 계측된 파의 방향을, 원은 유럽 중기예보센터 데이터베이스로부터 추정된 파 의 방향을 각각 가리킨다. 두 값의 경향성이 대체로 일치하고 있 는 것을 알 수 있다. 다만, 8~14일 차에 약 30˚ 정도의 차이가 일정하게 나타났음을 알 수 있다.
Fig. 4, 5, 6, 7, 8, 9에서 보는 것처럼, 바람의 속도, 바람의 방향, 유의 파고, 파도의 방향 등을 기준으로 각각의 데이터에서 획득된 환경 정보를 비교하였다. 그 결과 바람의 속도 증감, 바 람의 상대 입사각, 파고의 증감, 파도의 상대 입사각 등의 경향 성이 유사함을 확인하였다. 다만, 유럽 중기예보센터에서 얻어진 파고와 변환된 바람의 상대 속도가 실선 계측된 값보다 정량적으 로 작게 추정되는 것을 알 수 있었다. 따라서 운항 시뮬레이션을 수행함에, 선체에 작용하는 환경 하중의 크기가 상대적으로 작을 것이라고 예상할 수 있다. 감소한 환경 하중은 운항 시뮬레이션 에서 추정되는 분당 회전수 및 동력의 크기에 직접 영향을 주기 때문에, 사용하는 데이터에 따라 발생하는 정량적인 오차에 대해 서 검토할 필요가 있을 것이다.
Fig. 8 Time histories of the significant wave height measured from the full-scale measurement and the significant wave height predicted from ECMWF database
Fig. 9 Time histories of the wave direction measured from the full-scale measurement and the wave direction predicted from ECMWF database
3.4 시뮬레이션 타당성 검토
선박 자동식별장치 및 유럽 중기예보센터 데이터를 이용한 운 항 시뮬레이션의 타당성을 검증하기 위하여 이전 연구에서 수행했 던 두 가지 종류의 타당성 검토를 같게 수행하였다 (You, et al., 2017c; You, et al., 2018). 계측된 운항 궤적 및 운항 속도를 각 데이터를 기반으로 계산한 값들과 비교하였다. 이전 연구와 마찬 가지로 시뮬레이션의 타당성을 보다 정밀하게 검증하기 위하여, 대각도 변침 구간에 대해서도 추가적인 비교를 수행하였다.
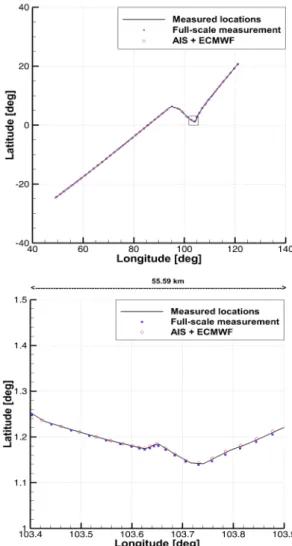
Fig. 10은 시뮬레이션 타당성 검토를 위하여, 계측 혹은 계산 된 선박의 경위도 좌표를 비교한 것이다. 먼저, 위의 그림은 전 체 운항 기간의 경위도 좌표를 도시한 것이다. 아래 그림은 대각 도 변침 구간에서의 시뮬레이션 타당성 검토를 위하여, 말라카 해협의 입구 근처에서 선박의 경위도 좌표를 확대하여 도시하였 다. 실선은 실선 계측 데이터에서 기록된 선박의 경위도 좌표를 가리키며, 사각형은 실선 계측 데이터를 기반으로 계산된 경위도
Fig.10 Comparison among the ship locations acquired from the full-scale measurement, those calculated from the full-scale measurement (You, et al., 2018), and those calculated from the AIS and ECMWF data
좌표를, 원은 선박 자동식별장치 및 유럽 중기예보센터 데이터베 이스를 기반으로 계산된 경위도 좌표를 가리킨다. 두 결과 모두 실제 선박의 경위도 좌표와 잘 일치함을 알 수 있다.
Fig. 11은 계측 혹은 계산된 선박의 운항 속도를 비교한 것이다.
Fig. 10과 마찬가지로, 위의 그림은 전체 운항 기간 선박의 속도 시계 열을 도시한 것이다. 아래 그림은 대상 선박이 말라카 해협 입구 근처 에서 운항했던 3.5~4.2일 차 시계열을 확대하여 도시한 것이다. 실선 은 실선 계측 데이터에서 기록된 실제 선박의 운항 속도를 가리키며, 사각형은 실선 계측 데이터를 기반으로 계산된 운항 속도를, 원은 선박 자동식별장치 및 유럽 중기예보센터 데이터베이스를 기반으로 계산된 운항 속도를 가리킨다. 대체로 실제 운항 속도와 계산된 값이 잘 일치하는 것으로 보이기는 하지만, 실선 계측 데이터를 기반으로 했을 때 약간의 불규칙한 정점이 보인다. 이것은 계측된 환경 정보의 불규칙한 증감과 관련된 것으로 생각된다. 다만, 그 크기가 크지 않고, 전체 운항 구간과 비교하면 관찰되는 구간이 매우 짧기 때문 에 계산된 값에 미치는 영향이 미미할 것으로 판단하였다.
Fig. 11 Comparison among the ship speeds acquired from the full-scale measurement data, those calculated from the full-scale measurement (You, et al., 2018), and those calculated from the AIS and ECMWF data
대상 선박이 운항하는 동안 조류의 속도 및 방향을 측정하지 못했기 때문에, 본 연구에서 수행된 각각의 계산에서 조류로 인 한 영향은 고려되지 않았다.
4. 시뮬레이션 결과
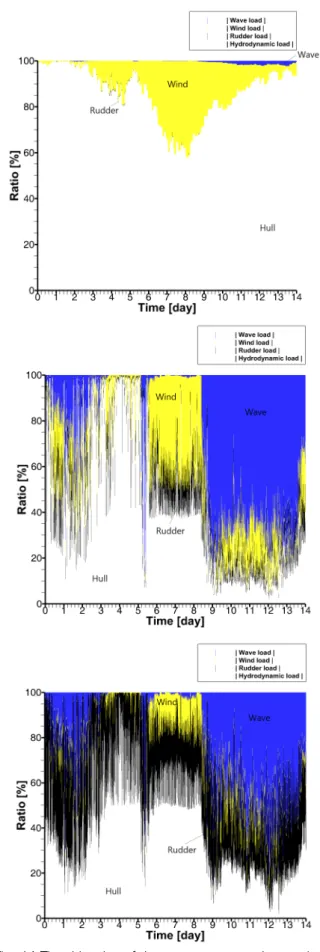
4.1 선체, 타, 바람, 파랑 하중의 상대 크기 비교 (종 방향, 횡 방향, 선수 동요 방향)
실선 계측 데이터 혹은 선박 자동식별장치 및 유럽 중기예보 센터 데이터베이스를 기반으로 추정한 실선 운항 성능의 차이를 좀 더 구체적으로 분석하고자, 14일 동안 계산된 X, Y, N 방향 하중을 각각의 성분별로 살펴보았다. 식 (5)에서와 같이, 선체, 타, 추진기, 바람, 파도 등 모두 다섯 가지 외력이 고려된다. 추 진기의 경우 오직 종 방향에 작용하는 모든 외력을 상쇄하고 일 정 속도로 추진하는 역할이기 때문에, 나머지 네 개 성분만을 비 교하였다.
Fig. 12는 14일 동안 계산된 선박의 표류각(drift angle)을 표 시한 것이다. 먼저, 위의 그림은 전체 운항 기간의 표류각 시계 열을 도시한 것이다. 아래 그림은 표류각이 |5|도 이내에서 빈 번하게 발생한 1~8일 차 결과를 도시한 것이다. 표류각은 실선 계측 데이터에 포함되지 않았기 때문에, 각각의 데이터를 기반 으로 계산된 값을 비교하였다. 사각형은 실선 계측 데이터를 기 반으로 계산된 표류각을, 원은 선박 자동식별장치 및 유럽 중기 예보센터 데이터베이스를 기반으로 계산된 표류각을 각각 가리 킨다.
대체로 두 계산 결과 모두 표류각이 주로 발생했던 구간이 일 치함을 알 수 있다. 1~3일 차, 4~5일 차, 7~8일 차 부근에서 표류각이 다소 뚜렷하게 나타났고, 나머지 구간에서는 거의 표류 각이 나타나지 않았다. 표류각이 발생한 원인은 각 구간에 따라 다르게 생각된다. 먼저, 1~3일 차의 경우 Fig. 7에서 보는 것처 럼, 바람의 입사각과 관련된다고 생각된다. 즉, 바람이 선수 사파 에서 선미 사파 범위에서 작용하고 있었기 때문에, 횡 방향 혹은 선수 동요 방향 바람 하중이 크게 작용하고 있었다. 반면, 4~5일 차, 7~8일 차는 바람 또는 파도의 방향이 대부분 선수 방향이었 다. 이 구간은 말라카 해협의 입구와 출구 부근에서 운항했던 기 간이며, 대각도 침로 변경에 따라 표류각이 발생한 것으로 생각 된다. 다만, 대부분 구간에서 표류각이 작기 때문에, 표류각으로 인해 발생하는 선체의 횡 방향 힘과 선수 동요 방향 모멘트의 절 댓값이 작을 것임을 예상할 수 있다.
각 하중의 상대 비율을 정의하는 방법은 이전 연구에서 정의 한 방법과 같게 적용하였다 (You, et al., 2018). 식 (9)에서 각 각의 상대 비율을 규정하고 있는데, 각 하중의 절댓값을 모든 하 중의 절댓값의 총합으로 나눈 것이다. 상대 비율을 정의하는 데 있어 절댓값을 이용한 이유는, 각각의 하중이 갖는 방향성에 따 라 상대 비율의 총합이 100%보다 작거나 크게 나타나는 것을 피 하기 위함이었다.
Fig.12 Time histories of calculated drift angles of the ship based on the full-scale measurement and the AIS and ECMWF database for 14 days
(9)
Fig. 13은 실선 계측 데이터를 기반으로 수행한 운항 시뮬레 이션에서 추정된 하중의 상대 비율을 종 방향, 횡 방향, 선수 동 요 방향 순서로 표시한 것이다. Fig. 14는 선박 자동식별장치 및 유럽 중기예보센터 데이터베이스를 기반으로 수행한 운항 시뮬 레이션에서 추정된 하중의 상대 비율을 종 방향, 횡 방향, 선수 동요 방향 순서로 표시한 것이다. 각 그림에서 흰색, 검은색, 노 란색, 파란색 영역은 각각 선체, 타, 바람, 파랑 하중을 가리킨 다. 범례만을 이용하여 각 영역을 명확하게 구별하기 어렵다고 생각하여, 각각의 영역에 하중의 정의를 추가로 표기하였다.
Fig. 13 Time histories of the surge, sway and yaw relative ratio among wave load, wind load, rudder load, and hydrodynamic load due to hull based on the full-scale measurement data (You, et al., 2018)
먼저, 종 방향 하중의 상대 비율부터 살펴보겠다. 각각의 시뮬레이 션에서 각 성분이 차지하는 하중의 상대 비율이 매우 흡사하게 나타났 다. 선체 저항이 종 방향 하중의 대부분을 차지하기는 하지만, 속도 변화 혹은 바람 속도의 증가에 맞추어 비율이 감소하는 경향을 보였 다. 타가 종 방향 하중에 차지하는 비율은 다른 하중에 비해 매우 미미한 2~3% 수준이기는 하기는 하지만, 빈번한 조타 행위가 예상되 는 말라카 해협 인근을 통과했던 구간에서는 짧은 시간 동안 타 하중 성분이 관찰되었다. 바람 하중의 경우 시간에 따라 크게 변하는데, 그 증감의 경향성이 Fig. 6에서 도시된 바람의 상대 속도 변화의 경향성과 매우 유사함을 알 수 있다. 파랑 하중의 경우 8일 차 이전에는 Fig. 13과 14에서 매우 유사한 경향성을 보이나, 8일 차 이후에는 상대 비율 관점에서 다소 큰 차이를 보인다.
대체로 실선 계측 데이터를 기반으로 계산된 바람 하중의 상대 비율이 선박 자동식별장치 및 유럽 중기예보센터 데이터베이스를 기반으로 시뮬레이션 한 바람 하중의 상대 비율보다 크게 나타났다.
앞에서 각각의 데이터로 계산된 바람의 상대 속도 크기를 봤을 때, 실선 계측 데이터가 대체로 크게 계측한 것이 상대 비율의 정량적 차이의 원인일 것으로 생각된다. 다만, 3~4일 차 사이에는 선박 자동식별장치 및 유럽 중기예보센터 데이터베이스를 기반으로 계산 했을 때 바람 하중의 상대 비율이 실선 계측 데이터를 기반으로 시뮬레 이션 했을 때보다 큰 것으로 보인다. 이것 또한 Fig. 6에서 이 기간에 유럽 중기예보센터 데이터베이스를 기반으로 변환된 바람의 상대 속도가 실선 계측된 바람의 상대 속도보다 컸던 것과 관련되어 있다.
즉, 유럽 중기예보센터 데이터베이스를 통해 3~4일 차에 추정된 바람의 상대 속도가 실제 계측된 풍속보다 컸고, 더 큰 바람 하중이 작용했다고 볼 수 있다.
실선 계측 데이터에서는 4일 차와 7일 차에 바람 하중의 상대 비율이 매우 커지는 현상이 있었다. 이 시점에 대상 선박은 말라 카 해협의 입구 혹은 출구를 통과하며, 대각도 변침 및 속도 감 소가 이루어졌던 기간에 해당한다. 선속이 매우 낮아지면서, 상 대적으로 풍하중이 차지하는 상대 비율이 높아진 것으로 생각된 다. 하지만 선박 자동식별장치 및 유럽 중기예보센터 데이터베이 스를 기반으로 계산한 경우 이러한 효과는 뚜렷하게 나타나지 않 았다. 실선 계측 데이터를 기반으로 계산된 경우에는 바람 센서 에서 계측된 상대 풍속의 흔들림 때문에, 불규칙한 정점을 뚜렷 하게 보이는 것으로 생각된다.
14일 동안의 운항 기간에 7~9일 차에는 바람의 속도가 대체로 큰 구간이었다. 때문에 바람 하중이 차지하는 상대 비율이 매우 크게 나타났다. 선속 저하로 인한 선체 저항이 감소했던 4일과 7일을 제외 하더라도, 선체 저항이 전체 종 방향 하중의 약 60%를 차지하고, 바람 저항이 나머지 40%의 대부분을 차지하고 있다.
파랑 하중의 경우 8일 차 이후에 경향성이 차이가 있는 것으로 보이는데, 이 부분은 Fig. 9에서 30˚ 정도의 파도의 방향 차이에 기인한 것으로 보인다. 상대 입사각 관점에서, 실선 계측 데이터는 파도가 주로 선수 사파에서 선미 사파 방향으로 계산되는 데 비해, 유럽 중기예보센터 데이터베이스는 파도가 주로 선수에서 횡파 방향으 로 계산되었다. 따라서, 유럽 중기예보센터 데이터베이스 기반으로 계산되는 경우에 종 방향 힘이 더 크게 계산되었다고 생각된다.
Fig. 14 Time histories of the surge, sway, and yaw relative ratio among wave load, wind load, rudder load, and hydrodynamic load due to hull based on the AIS and ECMWF database
횡 방향 하중의 상대 비율을 살펴보겠다. 일반적으로 추진기, 타를 운용하는 선박에서 방향 안정성을 확보할 수 있지만, 위치 안정성을 확보할 수 없다고 알려져 있다 (Lewis, 1989). 횡 방향 힘은 선박을 경로에서 밀어낸다고 생각하면 될 것이다. 두 결과 에 뚜렷한 차이를 보이는데, 실선 계측 데이터를 기반으로 시뮬레 이션 한 경우 바람 하중의 영향이 거의 없는 것으로 추정되는 반 면, 유럽 중기예보센터 데이터베이스를 기반으로 시뮬레이션 한 경우 상대적으로 바람의 영향이 뚜렷하게 관찰되었다. 다만, 파랑 하중이 횡 방향 하중에 주요한 것은 공통으로 인지할 수 있다.
종 방향 하중보다 횡 방향의 경우 선체가 차지하는 하중의 상 대 비율이 낮은데, 이것은 선박이 운항 중 표류각이 대체로 작은 값을 보였기 때문으로 보인다. 말라카 해협의 입구 부근에 있었 을 것으로 예상하는 3일에서 5일 사이에는 환경 하중이 차지하 는 상대 비율이 매우 낮아졌음을 알 수 있다.
초기 1~4일 구간에서는 대부분의 파도가 선수파로 작용하기 때문 에 두 결과 모두 미미한 정도의 횡 방향 하중을 발생시키고 있다.
하지만, 6~7일 차가 지나면서부터 횡 방향으로 작용하는 파도가 발생함에 따라 뚜렷하게 파랑 하중의 상대 비율이 증가하고 있다.
다만, 바람 하중이 더 크게 관찰되는 것은 Fig. 7에서 상대 입사각이 좀 더 큰 30˚ 내외에서 입사되고 있기 때문으로 생각된다.
마지막으로, 선수동요 방향 하중의 상대 비율을 살펴보겠다.
기본적으로 횡 방향 힘 성분에 모멘트 암(moment arm)을 곱해서 선수동요 모멘트가 구해지는 만큼, 횡 방향 하중의 경향성과 유 사한 경향성을 볼 수 있다.
다만, 선박의 직진 운항을 위하여 타가 꾸준하게 사용되고 있 고, 그 크기가 선수동요 하중의 큰 부분을 차지함을 알 수 있다.
이것은 바람 및 파도에 의한 하중이 선박의 횡 방향, 선수동요 방향의 교란을 일으켰고, 이를 보상하면서 직진 운항을 하기 위 하여 타가 끊임없이 사용되고 있기 때문이다.
Fig. 13과 14를 통해 각각의 성분별로 하중이 차지하는 상대 비율 의 특징을 살펴보았으며, 실선 계측 데이터를 기반으로 수행한 시뮬레 이션과 선박 자동식별장치 및 유럽 중기예보센터 데이터베이스를 이용한 시뮬레이션의 결과를 비교하였다. 종 방향 힘의 경우 대체로 유사한 경향성을 보였으나, 환경 하중의 입사각도에 따른 차이 때문에 파랑 하중의 경우 다소 차이가 있음을 알 수 있었다. 반면, 횡 방향 힘과 선수동요 방향 모멘트의 경우 경향성에 다소 차이가 있음을 알 수 있었다. 전체 운항 기간에 표류각의 크기가 매우 작기 때문에, 환경 정보에서 제공된 입사각의 미미한 차이로도 실제 계산되는 하중 에 큰 차이가 상대 비율의 차이로 나타났다고 생각된다.
14일 동안의 운항 기간 선체 저항 및 바람 하중이 종 방향 운 항 성능에 영향을 주는 가장 주요한 인자였으며, 횡 방향, 선수 동요 방향에 하중 전달로 인한 타 제어에는 파랑 하중이 주요한 인자였다고 추정된다.
4.2 분당 회전수 및 동력 추정
선박 자동식별장치를 통해 획득한 경위도 좌표, 대지속도 등 의 운항 기록만을 이용하여 분당 회전수, 동력을 추정했을 경우
정량적 오차가 뚜렷하게 발생함을 확인한 바 있다. 환경 하중이 반드시 고려되어야 함을 확인한 이후, 실선 계측 데이터를 기반 으로 바람과 파도에 의한 영향을 고려한 후 운항 중인 선박의 분 당 회전수와 동력을 신뢰도 높게 추정하였다.
이전 연구와 마찬가지로 선박 자동식별장치 및 유럽 중기예보 센터 데이터베이스를 이용하여 분당 회전수 및 동력을 추정하였 다. 추정된 결과를 이전 연구에서 실선 계측 데이터 기반으로 시 뮬레이션 한 결과와 비교하였으며, 실선 계측된 값과도 비교하였 다. 계산된 두 결과의 정량적 차이를 확인함으로써, 선박 자동식 별장치 및 유럽 중기예보센터 데이터베이스의 조합으로 실선 계 측 데이터를 대체하는 것이 가능한지 판단하고자 했다.
Fig. 15는 운항 시뮬레이션이 수행되는 동안 계측되거나, 계산된 분당 회전수의 시계열을 보여주고 있다. 실선, 사각형, 원은 각각 실선 계측된 분당 회전수, 실선 계측 데이터를 기반으로 계산된 분 당 회전수, 선박 자동식별장치 및 유럽 중기예보센터 데이터베이스 를 이용하여 계산된 분당 회전수를 각각 보여주고 있다. 실선 계측 된 분당 회전수는 선박이 실제 운항하는 동안 별도의 계측 장치를 통해 계측했던 값을 가리킨다. 계산된 분당 회전수는 Fig. 10에서 볼 수 있는 선박의 위치를 경로점으로, Fig. 11에서 볼 수 있는 선박 의 속도를 명령속도로 가정하여 타각 및 분당 회전수를 조절함으로 써 조종운동방정식을 풀어 추정된 값을 가리킨다.
실선 계측된 위치와 선속을 추종하도록 시뮬레이션을 수행했고, 그 결과 시차 및 경로의 차이가 미미함을 Fig. 10과 11에서도 확인 한 바 있다. 이전 연구에서 분당 회전수와 동력의 경우 유사한 경향 성을 보이기는 하지만, 계측된 값과 계산된 값 사이에 0.1일 정도의 시차가 발생함을 지적한 바 있다. 실제 선박에서는 운항자가 동력을 제어하고 일정 시간이 지난 후 선속의 변화가 나타나는데, 본 시뮬 레이션 기법의 특성상 선속의 변화에 따라 필요한 분당 회전수와 동력을 추정하기 때문으로 밝힌 바 있다.
Fig. 15 Time histories of the measured RPM, the RPM calculated from the full-scale measurement (You, et al., 2018), and RPM calculated from the AIS and ECMWF database
선박 자동식별장치 및 유럽 중기예보센터 데이터베이스를 기 반으로 시뮬레이션을 수행했을 때도 실선 계측 데이터를 기반 으로 시뮬레이션을 수행한 경우와 매우 유사한 경향성을 보이 며, 실선 계측된 분당 회전수를 잘 추종하고 있는 것으로 보인 다. 다만, 선박 자동식별장치 및 유럽 중기예보센터 데이터베 이스를 기반으로 추정된 분당 회전수가 실선 계측 데이터를 기반으로 추정된 분당 회전수보다 미미하게 작음을 확인할 수 있다. 특히 바람의 속도가 큰 것으로 보였던 6일 차 이후에는 추정된 분당 회전수가 작게 추정되었음이 뚜렷하게 인지되었 다. 이것은 Fig. 6과 8에서 본 것처럼, 유럽 중기예보센터 데 이터베이스로부터 추정된 바람의 상대 속도와 유의 파고가 실 선 계측된 바람의 상대 속도와 유의 파고에 비해 작았기 때문 이다. 선체에 작용하는 바람 및 파랑 하중의 크기가 작았기 때 문에, 운항 속도를 유지하기 위하여 더 작은 추력이 필요했을 것으로 생각된다.
Table 3에서는 계측되거나 계산된 분당 회전수를 통계적으로 처리한 값을 보여주고 있다. “Mean RPM”은 14일 동안의 분당 회전수를 평균한 값이고, “Mean of RPM error/Mean RPM"은 계 측된 분당 회전수에서 각각 계산된 분당 회전수의 차이의 평균값 을 앞서 계측된 ”Mean RPM"으로 나누어준 것이다.
이전 연구에서 실선 계측 데이터를 기반으로 계산된 분당 회 전수가 2.88% 과대 추정되었음을 확인한 바 있다. 선박 자동식 별장치 및 유럽 중기예보센터 데이터베이스를 이용하여 계산된 분당 회전수도 0.06% 과대 추정하고 있기는 하지만, 그 차이가 미미한 것으로 보인다.
더 작은 환경 하중이 고려된 선박 자동식별장치 및 유럽 중기 예보센터 데이터베이스를 기반으로 계산된 분당 회전수가 실선 계측 데이터를 기반으로 계산된 분당 회전수보다 실선 계측 값과 더 유사하게 나타났다. 단순히 이 결과만으로 어떤 계산이 더 정 확했다고 판단할 수는 없다고 생각된다. 즉, 계산된 분당 회전수 가 과소 추정되는 구간과 과대 추정되는 구간이 복잡하게 나타남 으로 인해 누적된 시점에 따라 일정 수준의 오차가 발생할 수 밖 에 없다. 두 계산 모두 정량적인 오차를 가질 수 밖에 없음을 인 지하되, 어느 정도 크기의 오차범위 내에서 계산 결과를 신뢰할 수 있는지 판단하는 것이 필요할 것이다.
Table 3 Statistical values acquired from the measured RPM, RPM calculated from the full-scale measurement (You, et al., 2018), and RPM calculated from the AIS and ECMWF data
Mean RPM [-] Mean of RPM error / Mean RPM [%]
Measured
RPM 72.69 -
Full-scale
measurement 74.78 -2.88
AIS +
ECMWF 73.19 -0.06
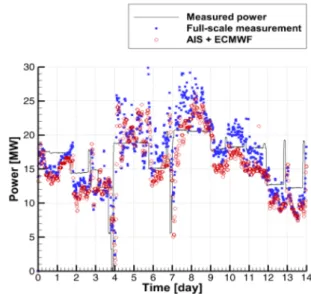
Fig. 16은 운항 시뮬레이션이 수행되는 동안 계측되거나, 계 산된 동력의 시계열을 보여주고 있다. 실선, 사각형, 원은 각각 실선 계측된 동력, 실선 계측 데이터를 기반으로 계산된 동력, 선박 자동식별장치 및 유럽 중기예보센터 데이터베이스를 이용 하여 계산된 동력을 각각 보여주고 있다. 앞에서 분당 회전수 시 계열과 같이 선박 자동식별장치 및 유럽 중기예보센터 데이터베 이스를 기반으로 시뮬레이션 한 결과가 실선 계측 데이터를 기반 으로 시뮬레이션을 수행한 경우와 유사한 경향성을 보임을 확인 하였다. 다만 그 정량적인 차이는 좀 더 뚜렷하게 나타나는데, 이전 연구에서 밝혔던 것처럼 동력이 분당 회전수 세제곱에 비례 하기 때문에 정량적 오차가 더 뚜렷하게 보이는 것이다.
선박 자동식별장치와 유럽 중기예보센터 데이터베이스를 통해 추정된 결과가 실선 계측된 분당 회전수와 더 유사했음에도 불구 하고, 동력에서는 더 큰 오차를 보인다. 그 이유는 본 연구에서 고려되지 않은 척도효과(scale effect), 조류, 상하동요(heave) 등의 요인 때문이라고 생각된다. 즉, 본 연구에서는 이상적인 운용
Fig. 16 Time histories of the measured power, the power calculated from the full-scale measurement (You, et al., 2018), and power calculated from the AIS and ECMWF database
Table 4 Statistical values acquired from the measured power, power calculated from the full-scale measurement (You, et al., 2018), and power calculated from the AIS and ECMWF data
Mean power [MW] Mean of power error / Mean power [%]
Measured
power 16.59 -
Full-scale
measurement 16.79 -1.17
AIS +
ECMWF 15.43 7.01