재난대응용 특수목적기계의 양팔 작업기 형상 설계
Design of Dual Arm Manipulator for a Disaster-Responding Special Purpose Machinery
조정산
1․박상신
1․김진탁
1․박병윤
1․배지훈
1․이동혁
1․이규영
2․진영훈
2․박상덕
1* Jung-San Cho, Sang-Sin Park, Jin-Tak Kim, Byung-Yoon Park, Ji-Hun Bae,
Dong-Hyuk Lee, Gyu-young Lee, Young-Hoon Jin, Sang-Duck Park
Table 1 Rescue machineries
Hitachi ASTACO TMSUK T-52 Sarcos Bigarm
사진
조종 방식
특징
-기존 굴착기 조이스틱 방식 -암 6자유도, 어태치먼트:1자유도 -최대 작업 범위 6.5m
-전체 중량 : 14톤 -도쿄소방서 배치
-웨어러블 조종방법
-암:6자유도, 어태치먼트:1자유도 -최대 작업 범위: 7.23m
-전체 무게 2.5톤
-페이로드: 한 팔당 100kg
-웨어러블 조종방법
-암:7자유도, 어태치먼트:1자유도 -최대 작업 범위: 2.1m
-페이로드: 한 팔당 90kg 1. 서 론
지진이나 수해 등의 자연 재해와 부실공사 등으로 인한 건물 붕괴 사고의 발생 건수가 증가함에 따라 이를 대응할 수 있는 구조용 장비에 대한 필요성이 대두되고 있다. 현재는 붕괴 사고 시 소방관이 직접 진입하여 수작업으로 대응 작업을 펼치고 있으나 이 는 안전을 보장하기 어려우며, 특히 대형 잔해물을 해체하거나 옮기는데 많은 시간을 소비하게 되며, 대 형 사고에서의 초동대응에 한계가 있다. 현재는 주로 굴착기를 이용하여 구조작업이 이루어지는데, 땅을 파는 것에 최적화된 굴착기는 재난 환경과 같은 비 정형 환경에서 다양한 작업을 수행하기가 어렵다. 또
한 운전자의 숙련도에 따라 작업성의 차이가 크며, 이동 능력의 제한으로 프론트와 스윙을 이용하여 복 잡한 지형을 이동하다보니 진입 시간이 오래 걸리고, 운전자의 안전성을 보장하기 어려운 상황에서 실패 에 대한 불안감으로 신속한 대응에 한계가 있다. 이 러한 문제를 해결하기 위해서 세계적으로도 다양한 장비들이 개발되고 있다.
Table 1에서는 대표적인 재난 대응 장비에 대한 것 으로 먼저, HITACHI사의 ASTACO[1,2]는 기존의 굴 착기의 몸체에 두 개의 작업기를 대칭으로 구현한 것으로 ‘두 개의 프론트를 가지는 굴착기’라고 부른 다. 대형 모델(NEO)은 건물해체에 주로 활용되며, 재 난 대응을 위해 도쿄소방서에 배치된 장비는 7톤으
로 대칭구조의 프론트를 가지며, 각각의 프론트는 6 개의 관절로 구성되어 있다. 오른쪽 프론트로는 절단 과 부수기 등이 가능하고 왼쪽에는 그랩이 장착되어 있다. 조작 방법은 기존 굴착기의 조이스틱 방식으로 각 관절을 조작하는데, 운전자의 한팔로 6개의 실린 더를 제어하는 방식으로 복잡한 조이스틱 구조를 가 진다.
Fig. 1 Special Function Machinery(SFM) for a disaster-responding
Tmsuk사의 T-52은 각각 6자유도로 구성된 양팔 과 기능이 다른 1자유도의 어태치먼트로 구성되어 있으 며, 작업자가 직접 탑승하여 조종할 수 있지만, 구조 대원이 들어갈 수 없는 곳에 들어가 구조작업을 수 행하기 위해 원격 제어도 가능하도록 개발 되었다 [3,4].
Sarcos의 Big Arm은 Ditch Witch 시스템을 수정하 고 Big Arm을 장착하여 산업 현장의 구조화되지 않 은 환경에서 중량물을 효율적으로 운반 작업 할 수 있도록 양 팔형 로봇을 개발하였다[5]. Big Arm은 인 간과 비슷한 구조로 구성되어 있어서 인간의 움직임 에 따라 동작하도록 개발되었다.
이외에도 양팔형 굴착기 형태를 가지는 HITACHI 사의 ASTACO-SoRa, Brokk 40 모바일 플랫폼에 두 개의 Hydro-Lek 매니퓰레이터를 장착한 구조의 장비 와 4족 보행과 트랙을 이용한 이동이 가능한 몸체와 두 팔을 장착하여 작동하는 장비인 Tadano사의 ROBOTOPS가 있다[6-8].
이처럼 세계적으로 다양한 재난 대응 장비들이 개 발되고 있는데, 기존 굴착기의 한계를 보완한 양팔 형태의 작업기(프론트)로 구성되며, 운전자가 조종하 는 형태를 가진다. 이러한 장비들이 재난 상황과 같 은 비정형 환경에서 복잡한 작업수행을 위해서는 재 난 대응 시나리오와 사람의 움직임을 고려한 양팔 작업기 설계가 필요하다.
본 논문에서는 재난 대응용 장비를 위한 특수목적 기계의 양팔 작업기 설계에 관한 것으로, 2장에서는 붕괴 지역 재난 환경을 바탕으로 개발된 대응 시나 리오와 기존 특수목적기계 분석을 통해 작업 타스크 를 정의하여 설계 파라메터를 도출하고, 3장에서는 설계 파라메터에 따른 작업 영역 및 조작성능을 시 뮬레이션으로 분석하였고, 레이아웃을 설계를 통한 각 관절의 설계 이슈에 대해서 설명하고자 한다.
2. 설계 파라메터 도출
재난 대응용 특수목적 기계를 설계하기 위하여 우 선 어떤 작업을 수행할 지에 대한 정의를 통하여 각 기능별 목표 항목을 도출하였으며, 운전자의 움직임 과 로봇 제어 기술을 접목하기 위한 제어성을 고려 하여 작업기 형상을 설계하였다.
2.1 재난 대응 작업 시나리오
우선 수행해야 하는 작업에 대한 시나리오 작성을 위하여 붕괴지역 및 재난 환경 분석과 더불어 전문 가의 자문을 통하여 요구되는 작업과 이에 따른 동 작을 Table 2와 같이 분류하였으며, 대표적인 작업은 Fig. 2에 나타내었다. 작업은 크게 절단, 인양, 벌리 기, 이동, 때리기로 나뉘며, 각 작업은 한팔로 가능한 작업과 양팔을 사용해야 하는 작업으로 각각 나눌 수 있다.
Fig. 2 The tasks of disaster-responding
Table 2 The scenario of disaster-responding 작업 주요 동작
절단
[한팔]절단기- (파이프, 철근,H빔) [한팔]컷팅(회전톱)- 샌드위치 패널 [양팔]한팔 잡고, 다른 팔 절단기
인양
[한팔]팔 뻗어서 200kg 들어올리기 [한팔]그리퍼로 200kg
[한팔]1ton 인양
[양팔]팔 뻗어서 350kg 인양 [양팔]250kg 드럼통 들기 [양팔]2ton 인양
벌리기 [한팔]어태치먼트 이용 벌리기 [양팔]양팔 이용하여 벌리기
이동 (옮기기)
[한팔]콘크리트 잔해 1ton 전방향 밀기 [양팔]승용차(1.5ton)를 밀어서 치우기 [양팔]드럼통 집어서 쌓기
[양팔]긴 파이프 옮기기 [양팔]자동차 들어서 치우기
때리기 [한팔]팔을 휘둘러서 벽 등을 때리기
먼저 안전하게 사람을 구조하기 위해 진입로를 확 보하고 사람들의 탈출로를 확보하기 위해 절단 작 업은 진입로를 막고 있는 건물 잔해물 중 H빔, 파이 프, 철근 등을 절단기(쉐어)로 잘라 내거나, 진입로 확보 또는 사람의 탈출로 확보를 위하여 가건물 등 의 샌드위치 패널을 자르기 위해 컷팅툴로 잘라내야 하는데, 이러한 작업 중 대상물이 고정되지 않을 경 우 다른 한 팔로 대상을 잡고 절단하는 양팔을 활용 한 자르기 작업도 필요하다.
다음으로 물건을 들어 올리는 인양작업은 팔을 뻗 어서 한 팔로 200kg을 들어 올리고 가장 큰 힘을 낼 수 있는 자세에서 한 팔로는 1톤을, 양팔로는 2톤의 물체를 들어 올릴 수 있어야 하며, 250kg의 드럼통을 사람과 같이 양팔을 이용하여 끌어안아 들고 옮길 수 있고, 고리를 이용하여 중량물을 인양할 수 있다.
또한 벌리기는 어태치먼트를 이용하여 벌리거나, 양 팔을 이용하여 벌리는 것이 가능해야 한다.
한팔로 1ton의 콘크리트 잔해를 치우거나, 양팔로 1.5ton 승용차를 밀어서 치우는 작업, 양팔을 이용하 여 긴 파이프나 승용차 등을 양팔을 이용하여 들어 올릴 수 있어야 한다. 때리기는 블록으로 쌓여진 벽 을 팔로 쳐서 무너뜨리는 것을 말한다.
2.2 조종방법을 고려한 형상 설계
비정형 환경에서 복잡하고 다양한 작업을 인공지 능을 활용하여 완전 자율로 수행하는 것은 현재의 기술로는 불가능하다. 결국 운전자가 필요하며, 이를 위해서는 운전자의 판단과 의도대로 잘 움직여 줄 수 있도록 작업기를 설계하는 것이 중요하다. 기존 굴착기가 사람의 두 팔을 이용하여 4자유도인 하나 의 작업기(프론트)를 조종하는 것과 달리 양팔 작업 기의 경우, 이와 다른 조종 방식과 제어 방식이 요구 된다. 기존 굴착기는 손으로 조이스틱을 조작하여 각 실린더에 유입되는 유량을 각각 조절하는 방식으로
‘속도형 관절 직접 교시’ 라고 할 수 있으며, 이는 사 람의 움직임과 작업기의 움직임이 직관적으로 매칭 되지 않기 때문에 훈련을 통한 숙달이 필요하므로 장비의 작업 성능은 운전자의 조작 능력에 의존적일 수밖에 없다.
SARCOS社나 TMSUK社에서는 웨어러블형태의 조 종기를 활용하지만, HITACHI의 ASTACO는 기존 굴 착기의 조이스틱을 좀더 복잡하게 구성하여 개조한 방법을 사용하는데, 동영상을 통하여 비교 분석이 가 능하다. 이러한 조종기나 조이스틱에 대한 부분과 제 어 알고리즘에 대한 내용은 다음 논문에서 다루기로 하고, 본 논문에서는 설계적인 측면에서만 다루고자 한다.
양팔형 작업기의 형상은 사람의 의도대로 정확히 움직이기 위해서 사람 팔의 형상과 유사한 것이 유 리하다. 산업용 로봇 분야에서 전통적인 6자유도의 로봇 팔을 컨베이어 생산체제에서 하나의 타스크에 최적화하여 단순한 작업을 반복하는 것이었으나, 근 래에 들어 로봇 팔이 다양한 작업을 수행하며, 인간 의 작업을 대신할 수 있도록 7자유도 이상의 팔을 두 개 가진 양팔형 로봇으로 개발되고 있는 것을 볼 수 있다. 양팔형 로봇 또는 장비를 살펴보면, 어깨 3 자유도(R-P-Y or P-R-Y), 팔꿈치 1자유도, 손목 3자유 도(R-P-Y or Y-P-R)로 구성되며, 양팔 협조 작업을 위해서 어깨 관절의 Yaw 관절이 필수적고, 복잡한 작업과 양팔 작업을 위해서는 3자유도 이상의 손목 관절이 필요하다. 이는 2자유도로 구성한 HITACHI 社의 ASTACO와 3자유도로 구성된 SARCOS社의 BigArm의 작업 영상에서 그 차이를 확인할 수 있다.
굴착기에서도 근래에 들어 Rototilt社의 RTxx[9]와 같 은 제품을 버켓에 장착하여 끝 부분을 3자유도를 구 현하여 다양한 작업에 활용하고 있다.
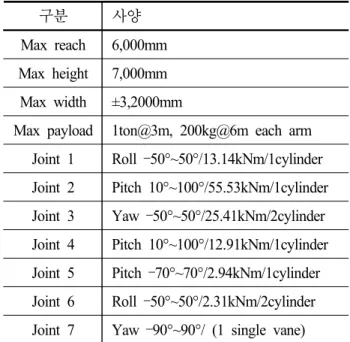
Table 3 Specification of SFM
구분 사양
Max reach 6,000mm Max height 7,000mm
Max width ±3,2000mm
Max payload 1ton@3m, 200kg@6m each arm Joint 1 Roll –50°~50°/13.14kNm/1cylinder Joint 2 Pitch 10°~100°/55.53kNm/1cylinder Joint 3 Yaw –50°~50°/25.41kNm/2cylinder Joint 4 Pitch 10°~100°/12.91kNm/1cylinder Joint 5 Pitch –70°~70°/2.94kNm/1cylinder Joint 6 Roll –50°~50°/2.31kNm/2cylinder Joint 7 Yaw –90°~90°/ (1 single vane)
양팔을 이용하여 작업할 경우 손목의 관절 작동 범위도 매우 중요하다. 사람의 경우 성인 남자의 평 균은 Roll –90~99도이고, Pitch는 –90~99도이며, Yaw 는 –27~47도[10]이다. 관절 배치에 있어 단순히 거리 에 대한 작업 영역을 넓히는 것이 아니라 양팔이 마 주잡고 작업하거나 비정형 환경에서 복잡한 작업을 수행하기 위해서는 손목 관절 구성을 통한 방향성에 대한 작업 영역을 확보하는 것도 매우 중요하다. 이 러한 사람의 손목 관절 의 동작 범위를 고려하여 마 지막 3관절의 작동 각을 설정하였으며, 각 관절의 회 전 중심 축의 거리를 최소화하며, 유압 액추에이터의 기구적 특성을 고려하여 설계하였다.
본 논문에서는 어깨 관절부터 Yaw-Pitch-Roll- Pitch-Pitch-Yaw-Roll로 2개의 작업기를 대칭구조를 채 택하였으며, 작업영역과 각 관절의 특성은 Table 3에 나타내었다.
3. 양팔 작업기 설계
3.1 작업영역 분석에 기반한 양팔 작업기 배치 특수목적기계는 비정형 환경에서 복잡한 작업을 수행하기 위하여 두 팔이 협력하며 작업할 수 있는 작업공간을 최대로 확보하는 측면에서 로봇 팔의 기 구적 배치를 고려할 필요가 있다. 특히 유압 액추에 이터를 사용해 로봇 팔을 구성 할 경우 관절의 가동 범위가 상대적으로 제한되므로 (일반적으로 90°~110° 내외) 양 팔의 관절 배치에 관한 설계 변수 선정과 구조는 양팔 작업기의 작업 성능에 큰 영향
을 미친다.
특수목적기계의 기본 구조를 결정하기 위하여 Fig.
3에 제시된 바와 같이 양 팔의 첫 번째 관절 사이의 거리 d와 첫 번째 관절의 초기 각도 (관절 가동 범위 의 중심에 위치한 각도) θ, 두 가지의 설계 변수를 선정하여 최적화하였다.
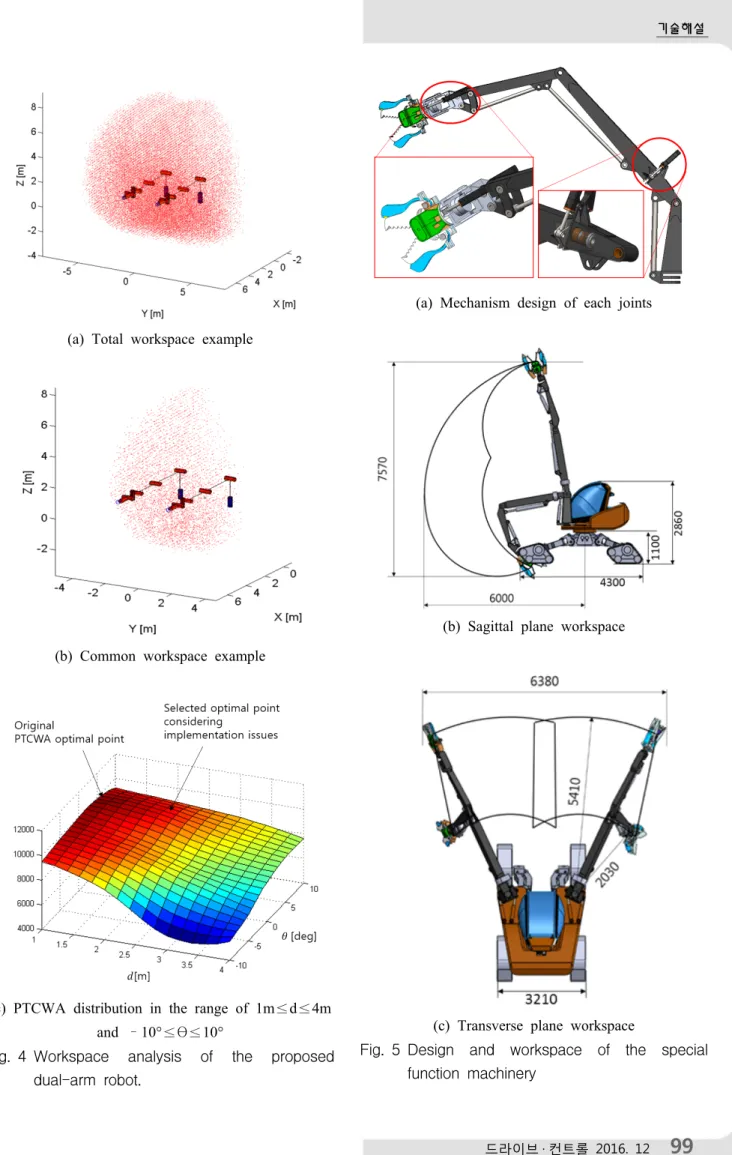
기존의 인간형 로봇에서 양 팔의 최적 배치를 위 한 평가 함수로써 Begheri는 PTCWA (Product of Total and Common Workspace Area)를 제안하였다 [11]. PTCWA는 두 팔의 총 작업영역의 부피와 공통 작업영역 (각 팔의 작업영역이 겹치는 공간) 의 부피 의 곱으로 표현되는 지수로써 양팔로봇에서 한팔 작 업 및 양팔 작업의 성능을 동시에 만족시키기 위해 고안되었다. Fig. 4의 (a)와 (b)는 양팔로봇의 총 작업 영역 및 공통 작업영역의 예시를 보여주고 있다. 본 연구에서는 d와 θ 두 가지 설계 변수에 대하여 PTCWA를 최대화하는 값을 찾고 이를 설계에 반영 하도록 하였다. Fig. 4의 (c)는 1m≤d≤4m 및 –10°≤
θ≤10° 구간에서 PTCWA의 분포를 보여준다.
본 논문에서는 Monte-Carlo 방법에 기반한 작업 영 역 분석 기법을 이용하여 총 작업영역 및 공통 작업 영역의 부피를 얻었다[12].
Fig. 4 (c)의 결과에 의하면, PTCWA는 d=1m, θ=7°
에서 10006으로 최대값을 나타냈다. 하지만 이 경우 d가 전체 팔 길이에 비해 과다하게 짧으므로 양 팔 사이의 기구적 간섭 및 무게중심의 안정성 문제가 발생할 수 있으므로, 이를 고려하여, d=2.4m, θ=5°
로 설계 값을 결정하였다. 이 경우 PTCWA는 9071로 써 최적 값에 비해 90.7%로, 전체적인 작업 성능을 유지하면서 기구적 간섭 및 안정성 문제를 피해갈 수 있을 것으로 판단된다.
Fig. 3 Design parameters of dual-arm alignment (Topview)
(a) Total workspace example
(b) Common workspace example
(c) PTCWA distribution in the range of 1m≤d≤4m and –10°≤θ≤10°
Fig. 4 Workspace analysis of the proposed dual-arm robot.
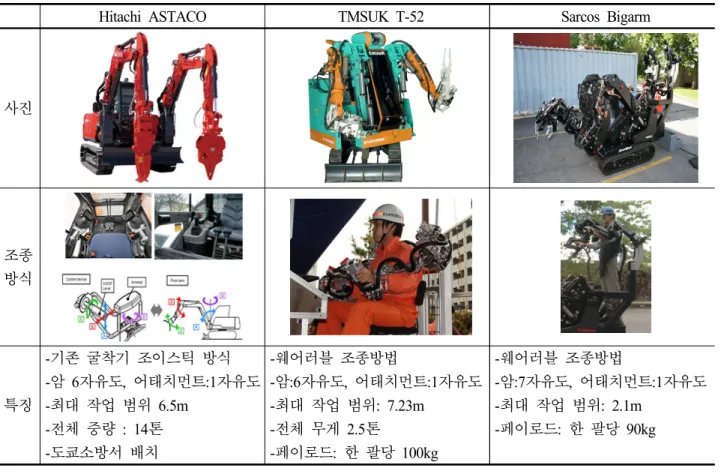
(a) Mechanism design of each joints
(b) Sagittal plane workspace
(c) Transverse plane workspace
Fig. 5 Design and workspace of the special function machinery
3.2 양팔작업기 형상 설계
특수목적기계의 양팔 작업기의 관절에는 굴착기에 사용되는 유압 실린더인 복동 피스톤형을 주로 사용 하는데, 관절의 작동 각도에 따른 관절 메커니즘 설 계가 필요하며, 인장력과 압축력의 차이로 인한 중력 방향을 고려하여 액추에이터를 배치해야 한다. 우선 1번, 3번과 6번 관절은 Roll방향 회전으로 좌우 토크 를 동일하게 가져가기 위하여 두 개의 실린더 액추 에이터로 구동하도록 하였으며, 회전 축에 편심방향 힘에 대한 강성 설계가 필수적이다. 2번, 4번, 5번은 중력방향에 해당되는 Pitch회전을 담당하는 관절로 액추에이터 배치도 이에 맞게 이루어졌으며, 특히 5 번 관절은 들어올리는(lift) 작업을 위한 구조로 액추 에이터를 배치하고, 넓은 작업 범위를 가지도록 6-bar 구조의 관절 메커니즘을 적용하여 ±70°를 가지도록 설계하였다. 이는 굴삭기와 대칭되는 구조이다.
7번 조인트는 작업범위를 넓히기 위하여 일반적으 로 굴착기의 어태치먼트에 부착하는 유압모터를 사 용하지 않고, 270도의 작동 각도를 가지는 싱글 베인 타입의 액추에이터를 사용하였다. Fig. 4는 설계된 특 수목적기계의 작업영역을 나타낸다. 땅을 파는 굴삭 기와 달리 위쪽 작업을 고려하여 7.5m의 영역을 가 지며, (c)는 좌우는 스윙을 제외한 영역을 나타내며, 양팔 협조작업을 위해서 두팔이 겹치는 영역도 존재 하도록 설계하였다.
4. 결 론
본 논문은 재난 대응용 특수목적기계의 양팔 작업 기 설계에 관한 것으로 설계 파라메터 도출을 위한 붕괴 지역 및 재난 환경을 바탕으로 개발된 대응 시 나리오와 기존 특수목적기계 분석을 통해 작업 타스 크를 정의하였으며, 조종방식에 따른 생체모방적 형 상을 설계하였다. 양팔 작업기 설계를 위한 작업 영 역 및 작업성에 대해 PCTWA의 최대 값과 무게 안 정성을 고려하여 최적화 설계를 진행하였으며, 이를 통한 형상설계와 유압액추에이터의 사양과 관절 구성 방법을 제시하였다. 향후 이러한 설계 방법을 토대로 특수목적 기계의 양팔 작업기를 개발할 예정이다.
후 기
이 연구는 산업통상자원부 산업핵심기술개발 [No.
10052968, 재난대응 특수목적기계 개발사업]의 지원 으로 수행되었음을 밝힙니다.
References
1) A. Ishii, “Operating System of a Double-Front Work Machine for Simultaneous Operation,” in Proc. Int. Symp. Automation and Robotics in Construction, 539–542, (2006)
2) https://en.wikipedia.org/wiki/Hitachi_Construction _Machinery
3) T-43 Enryu, Internet : http://www.tmsuk.co.jp /english/ robots.htm, (2007)
4) T. Nishida, S. Kurogi, K. Yamanaka, W. Kogushi, and Y. Arimura, “Development of Pilot Assistance System with Stereo Vision for Robot Manipulation,” Intech Open Access Publisher, 287-302, (2007)
5) Raytheon-Sarcos, “Raytheon Sarcos modified Ditch Witch,” https://www.youtube.com/watch?v=H9aeBIU- pvo&list=PLFBA2C80F6C49688D, Accessed 1 Noc (2016)
6) H. Yatsuzuka, “The Human Interface of Dual-Arm Heavy machinery Type Robot “ASTACO-SoRa” for Nuclear Power Plants,” Nippon Robotto Gakkai-Shi, Vol. 33, No. 6, 404-407, (2015)
7) M. J. Bakari, K. M. Zied, and D. W. Seward,
“Development of a Multi-Arm Mobile Robot for Nuclear Decommissioning Tasks,” Int. J. of Advanced Robotic Systems, Vol. 4, No. 4, 387-406, (2007)
8) ROBOTOPS, “Tadano Unveils ROBOTOPS, the Crane of the Future,” Internet :(2009) https://www.tadano.com/news/2009/news0609.html, 9) Rototilt Brochure (http://www.rototilt.com)
10) “Human Factors Design Handbook 2nd ed”, Woodson, Tillman
11) M. Bagheri, A. Ajoudani, J. Lee, D. G. Caldwell, and N. G. Tsagarakis, “Kinematic analysis and design considerations for optimal base frame arrangement of humanoid shoulders,” In Proc. Int.
Conf. Robotics and Automation (ICRA), 2710–
2715, (2015).
12) J. Rastegar and B. Fardanesh, “Manipulation workspace analysis using the Monte Carlo method,”
Mechanism and Machine Theory, vol. 25, no. 2, pp. 233–239, (1990)
[저자 소개]
박상덕
E-mail : [email protected] Tel : 031-8040-6341
1988년 영남대학교 기계설계과 졸업 1990년 포스텍 기계공학과 석사 2000년 포스텍 기계공학과 박사과정 졸 업, 1989년12월~2003년12월 포항산업과 학연구원(RIST) 기전연구팀 책임연구원, 2004년∼현재 한국 생산기술연구원 로봇그룹 수석연구원, 유압구동로봇 설계 및 제어, 원격제어 기반 재난재해 대응용 로봇 시스템 및 컴포 넌트 개발 연구에 종사, KSFC, KSME, ICROS, KROS 등 회원, 공학박사

![Table 2 The scenario of disaster-responding 작업 주요 동작 절단 [한팔]절단기- (파이프, 철근,H빔) [한팔]컷팅(회전톱)- 샌드위치 패널 [양팔]한팔 잡고, 다른 팔 절단기 인양 [한팔]팔 뻗어서 200kg 들어올리기[한팔]그리퍼로 200kg[한팔]1ton 인양 [양팔]팔 뻗어서 350kg 인양 [양팔]250kg 드럼통 들기 [양팔]2ton 인양 벌리기 [한팔]어태치먼트 이용 벌리기 [양팔](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5531673.463282/3.918.97.444.163.602/responding-절단기-파이프-회전톱-샌드위치-들어올리기-그리퍼로-어태치먼트.webp)