논문 2014-52-2-10
2㎜×2㎜ 압저항형 가속도센서 설계 및 제작
( Design and Fabrication of 2㎜×2㎜ sized Piezoresistive Accelerometers )
전 연 화*, 김 현 철***
( Yeon-Hwa Jeon and Hyeon-Cheol Kim
ⓒ)
요 약
본 논문에서는 2㎜×2㎜ 크기를 가지며 빔의 위치가 다른 2가지 종류의 압저항형 가속도 센서를 설계하고 제작하여 감도 특 성과 온도에 따른 옵셋 특성을 측정하고 비교하였다. 4빔 스프링 구조와 8빔 스프링 구조를 가지는 압저항형 가속도센서를 제 작 하였으며, ANSYS 프로그램을 이용하여 공진주파수 특성과 스트레스 분포도를 분석하고 제작하였다. 제작된 가속도센서의 감도와 온도에 따른 옵셋 특성을 측정하고 서로 비교하였다. 감도는 4빔 스프링 구조가 21.38㎶/V/g으로 더 우수한 특성을 보 였으며 온도에 따른 옵셋 출력 전압은 4빔 스프링 구조가 154.45ppm/°C으로 더 작게 변화하였다.
Abstract
In this paper, 2㎜×2㎜ sized piezoresistive accelerometers were designed and fabricated. Two kinds of accelerometers with different spring structure are designed. One is an accelerometer with 4 beam spring located in the center of the mass, the other is an accelerometer with 8 beam spring located in the vertices of the mass. The modal analysis of the accelerometers and the structural analysis were performed using ANSYS program. The former has the superior sensitivity characteristics of 21.38㎶
/V/g and the lower offset drift of 154.45ppm/°C than the latter.
Keywords: accelerometer, piezoresistive, sensor, sensitivity, offset
Ⅰ. 서 론
가속도 센서는 일반적으로 자동차, 가정용 전자제품, 로봇, 미사일, 네비게이션 시스템 등에서 사용되고 있으 며 스마트폰을 포함한 모바일 전자기기에 핵심적으로 사용되고 있다.
일반적인 MEMS 가속도 센서는 압저항, 용량성 및 압전 효과를 기반으로 개발되고 있다[1]. 그 중에서도 압
* 학생회원, **평생회원, 울산대학교 전기공학부 (School of electrical engineering University of Ulsan)
ⓒ Corresponding Author(E-mail: [email protected])
※이 논문은 지이센싱코리아(주)의 연구비 지원 (과제 번호 2011-0696) 에 의하여 연구되었습니다.
접수일자: 2014년09월16일, 수정일자: 2015년01월05일 게재확정: 2015년01월26일
저항 효과는 여러 종류의 센서에서 널리 쓰이는 변환 효과로서, 실리콘의 우수한 기계적 성질과 함께 이용되 며 압저항형 가속도 센서는 반도체 집적회로 공정으로 제작이 가능하다. 선형성과 주파수 특성이 좋고, dc가속 도의 측정이 가능한 장점이 있어서 MEMS 기술로 압 저항형 가속도 센서 개발이 활발하게 이루어지고 있다
[2~4].
가속도 센서는 크기가 작아질수록 생산성이 높게 되 고, 시스템에 적용되는 용인성이 커지게 된다. 그러나 크기가 작아지면 관서질량 형성이 어렵게 되고 감도가 나빠지며, 타축 감도가 좋지않게 된다. 그러므로 작은 센서의 경우에는 표면 마이크로머시닝을 이용하여 정전 용량형 가속도 센서로 제작하게 된다. 정전용량형 가속 도 센서는 작은 크기의 센서 신호를 처리하기 위해 신
호처리 회로가 내장되어야 하고, 충격에 의한 stiction 문제가 있어서 진동 및 EMI 문제가 있는 열약한 환경 에서는 적용이 어렵다.
압저항형 가속도 센서는 외부 인가 가속도에 비례하 여 스프링 변형이 발생하고 그 변형에 의한 스트레스로 인한 압저항 물질의 mobility 차이를 이용하여 저항 변 화를 검출하고 가속도를 측정하는 방식이다. 고정된 관 성 질량의 크기와 스프링 구조의 설계에 따라 감도 및 옵셋 특성 등 센서 특성이 달라진다.
현재 보고된 압저항형 센서는 4빔 구조 연구가 주를
이루며[5~7] 감도특성이 좋다는 장점이 있다. 하지만 타
축 감도가 좋지 못하여 정확도(accuracy)가 좋지 못하 다. 따라서 빔의 개수를 증가 시켜 타축감도 특성을 개 선하여 정확도 특성을 좋게 하려는 연구도 진행되고 있
다[8~9]. 현재 보고된 [5~9]의 문헌을 비교하여 그 특징
을 표 1로 나타내었다.
타축감도 개선을 위해 [8~9]의 문헌에서 빔의 개수 를 증가시킨 연구가 진행되었으며 proof mass를 조절 하여 최대 감도를 가지게 하였다.
따라서 본 논문에서는 센서의 소형화 추세에 따라 2
㎜×2㎜의 크기의 압저항형 가속도 센서를 제안하고, 스 프링의 위치를 달리하여 4빔, 8빔 스프링 구조를 갖는 가속도를 설계하고 제작하였다. 제작된 가속도 센서의 온도 특성 및 감도를 측정하고 비교 분석하였다.
Refer ence 빔의
개수 크기 감도 타축 감도
[5] 4 4.4×4.8㎟ 20㎶/V/g - [6] 4 3.7×3.7㎟ 743㎶/g 5.6%
[7] 4 3×3㎟ 42.5㎶/V/g -
[8] 6 3.7×3.7㎟ 0.68㎷/g 1.0%
[9] 8 4.4×4.8㎟ 123㎶/V/g -
표 1. 압저항형 가속도 센서 비교
Table 1. Comparative of piezoresistive accelerometers.
Ⅱ. 본 론
1. 가속도 센서의 설계 및 시뮬레이션
가. 가속도 센서의 설계
그림 1은 4빔, 8빔 스프링 구조의 가속도 센서 기본 설계도를 보인다. 4빔 스프링은 일반적인 스프링 구조
(a) 4빔 스프링 구조 (b) 8빔 스프링 구조 그림 1. 가속도센서 설계도- 2가지 스프링 구조 Fig. 1. Designed accelerometer - two types of spring
structure (a) 4 beam (b) 8 beam.
로서 관성질량 중앙에 스프링을 연결하여 관성질량의 움직임이 스프링에 직접적인 영향을 미치도록 한 구조 를 가진다. 8빔 스프링은 관성질량의 각 모서리에 연결 하여 관성질량의 x축과 y축 비틀림에 대하여 강성을 갖도록 설계하였다. 8빔 스프링 폭은 4빔 스프링 폭의 1/2로 설계하여 z축에 대한 스프링 상수는 같게 설계하 였다. 각각 0.96㎜×0.96㎜의 크기의 관성질량을 중앙에 배치하였다. 각각의 빔은 100㎛ 길이의 스프링을 가지 며 수직(z축) 방향의 감도가 최대화 될 수 있도록 압저 항 센서를 설계하고 제작하여 그 성능을 비교 분석 하 였다.
가속도 센서의 크기는 2㎜×2㎜×0.4㎜의 크기로 제작 되었다. 표 2에서는 설계된 가속도 센서의 사양을 정리 하였다.
4빔 스프링 8빔 스프링
관성질량(mg) 0.86 0.86
스프링 크기(㎛3) 30×100×5.6 15×100×5.6 공진주파수
(kHz)
1st mode 40.76 41.61 2nd mode 53.02 240.28
스프링상수(N/m) 5.10 5.04
표 2. 4빔, 8빔 스프링 가속도 센서 특성 Table 2. Characteristics of accelerometer–4 beam,
8beam.
나. ANSYS SIMULATION
압저항 가속도 센서의 ANSYS 모델은 그림 2에 보 이고 있다. 시뮬레이션 모드 해석 결과로 각각의 센서 는 40.76㎑, 41.61㎑의 첫 번째 z축 방향의 공진 모드를 보여주었다. 타축감도를 보여주는 모드 결과로는 4빔 스프링인 경우 53.02㎑, 8빔 스프링인 경우 240.28㎑의 결과를 보여 8빔의 타축 특성이 더 우수할 것이라고 예 측할 수 있다.
(a) 4빔 스프링 구조
(b) 8빔 스프링 구조 그림 2. 가속도 센서의 공진모드
Fig. 2. Modal analysis of accelerometers.
(a) 4 beam (b) 8 beam
(a) 4빔 스프링 구조
(b) 8빔 스프링 구조
그림 3. 1g 인가 시 빔에서의 스트레스분포 ANSYS 결과 Fig. 3. Longitudinal stresses on surface of beam due
to the 1 g acceleration-(a) 4 beam (b) 8 beam.
그림 3은 가속도 1g를 z축 방향으로 인가했을 때 각 각 스프링에서의 종방향 응력(longitudinal stress)의 분 포를 보여준다. 이 분포에 따라 최대 응력(maximum stress)은 4빔 일 때에는 스프링의 가장자리로부터 5㎛, 95㎛ 떨어진 지점, 그리고 8빔일 때는 9㎛, 91㎛ 만큼 떨어진 곳에서 각각 발생하였으며 그때의 값은 각각 50708.78Pa, 50378.95Pa로 관성질량의 중앙에 빔이 위치 하는 것이 maximum stress가 약간 더 크게 발생하여 4 빔 스프링 구조의 감도가 더 우수하다는 결과를 알 수 있다.
2. 가속도 센서의 제작
벌크 마이크로머시닝을 이용하여 압저항형 가속도 센서를 제작하였다. 대략적인 제작공정은 그림 4와 같 다. P형 실리콘 반도체의 압저항 효과를 이용한 가속도 센서는 0.01~0.1 (Ω·m)비저항을 갖는 N형 (100) 실리콘 반도체 웨이퍼 기판위에 제작되었다. 500㎚ 두께의 열 산화막을 증착시키고 압저항 패턴을 형성한 후 400㎚
의 깊이로 열산화막을 식각하고 PR 을 제거 하였다. 이 후 압저항 형성을 위해 3×1014(atoms/㎠)의 붕소를 이 온 주입기를 이용하여 이온 주입하고 1000℃의 전기로 에서 1시간 동안 확산하였다. 가속도 센서의 관성 질량 체 형성을 위하여 코너 보상 패턴이 있는 식각
(a) 압저항 형성
(b) 실리콘 다이아프램 형성
(c) 유리 스탑퍼 형성
(d) 유리 양극 접합 그림 4. 압저항형 가속도 센서 제작 공정
Fig. 4. Cross-sectional view of the Accelerometer microfabrication process flow (a) forming piezoresistive (b) backside etch (c)forming glass-based stopper (d) wafer is bonded a glass.
마스크를 이용하여 실리콘 뒷면에 KOH 식각 패턴을 형성하였다. 그리고 압저항과 전기적 연결을 위하여 연 결 부위를 패터닝하고 식각하였으며 오믹 저항을 위하 여 5×1015 (atoms/㎠)의 붕소 이온 주입을 하였다. 1㎛
두께의 Al 금속 전극을 증착시키고 패터닝을 하였다.
이 후 PECVD 를 이용하여 SiN 보호막을 증착하고 전 극 패들 부분을 패터닝하였다. 실리콘 습식 식각용 상 용 지그를 이용하여 앞면을 보호하고 85℃ 의 TMAH 수용액에 넣어서 실리콘 뒷면을 식각하였다. 전기화학 적 식각 정지 방법을 사용하여 실리콘 다이아프램의 두 께가 5.6㎛가 되도록 식각하였다. 이 후 실리콘 앞면에 스프링 패턴을 형성하고 식각하였으며 Boro33 유리 기
(a) 4빔 구조 가속도 센서 (b) 8빔 구조 가속도 센서 그림 5. 제작된 가속도 센서의 사진
Fig. 5. Photographs of fabricated Accelerometer.
(a) 4 beam (b) 8 beam
(a) 4빔 스프링 (b) 8빔 스프링
그림 6. 가속도 센서 스프링 구조
Fig. 6. Spring structure - (a) 4 beam (b) 8 beam.
그림 7 가속도 센서 후면
Fig 7. The rear of fabricated accelerometer.
판에 2㎛의 스탑퍼를 형성한 후 실리콘 기판과 양극 접 합 하였다[10~11].
그림 5는 제작된 가속도 센서 사진을 보이고 있 으며 그림 6은 제작된 가속도 센서에서 스프링 부 분에 대한 확대 사진을 보인다.
그림 7은 제작된 가속도 센서의 후면 사진이다.
관성질량 형성 시 코너 보상 패턴이 완벽하지 못하 여 모서리 부분이 식각 되고 관성 질량이 예상과 달리 제작되었음을 알 수 있다.
Ⅲ. 실 험 및 결 과
1. 측정 실험
그림 8은 측정에 사용되는 장비들이다. 온도에 따른 옵셋 전압 특성은 그림 8(a)에 보인 프로브스테이션을 이용하여 25°C부터 5°C씩 증가시켜 85°C까지 나타나는 출력전압을 측정하였다. 가속도센서의 감도 측정을 위 하여 그림 8(b)에 보인 제작된 회전원판을 이용하여 각 도를 조절하여 중력 가속에 의한 센서 출력을 측정하였 다.
z축이 중력과 수직일 때를 기준으로 회전원판의 각도 가 0°이면 0g이고, 90°일 때 1g, –90°일 때 –1g로 두 고 출력 전압을 측정하여 감도를 확인하였다. 360°로 나 타낸 것은 감도를 유지하는지 확인하기 위해서이다.
(a) (b)
그림 8. 실험 측정 장비 (a)프로브 스테이션을 이용한 온도-전압 특성 (b)회전 원판을 이용한 각도-전 압 특성
Fig. 8. Experimental measurement equipment (a) temperature-voltage characteristic using probe station (b) angle-volate characteristic using a rotation disc plate
2. 실험 결과
그림 9는 회전 원판의 위치에 따른 가속도 출력을 수 직 중력 가속도로 환산하여 각각에 해당되는 g 출력의
(a) 4빔 스프링 가속도 센서 특성
(b) 8빔 스프링 가속도 센서 특성
그림 9. 회전원판을 이용하여 측정한 수직 중력가속에 대 한 출력전압 그래프
Fig. 9. Graph of the output voltage and vertical gravitational acceleration-(a) 4 beam (b) 8 beam 값을 구하고 평균하여 표시한 것이다. 수직 중력 가속 도에 대한 감도는 (a) 4빔 스프링 압저항 가속도 센서 가 21.38㎶/V/g, (b) 8빔 스프링 압저항 가속도 센서가 15.67㎶/V/g으로 4빔 스프링 구조가 감도가 우수함을 알 수 있다. 타축 감도는 (a)의 4빔 스프링 구조가 1.08
㎶/V/g 그리고 (b)의 8빔 스프링 구조가 0.94㎶/V/g로 나타나 8빔 스프링 구조가 좀 더 타축 감도가 낮게 나 타났다.
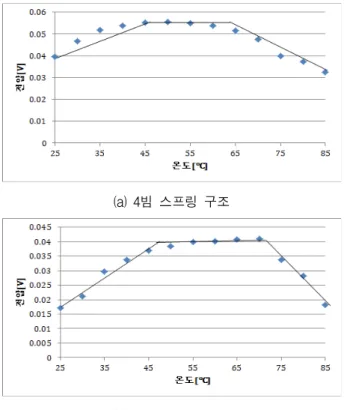
그림 10의 그래프에서는 온도에 따른 가속도 오프셋 출력 전압의 변화를 보이고 있다. 온도에 따른 오프셋 전압은 25°C와 45°C 사이에서는 온도에 따라 증가하였 고, 45°C와 65°C 사이에서는 온도에 무관하게 일정하였 고 65°C와 85°C 사이에서는 온도가 증가할 때 오프셋 전압은 감소하는 경향을 보였다. 온도에 따른 오프셋 출력전압은 25°C~45°C 사이에서 각각 (a) 154.45ppm/°C, (b) 197.72ppm/°C이며, (a)의 4빔 스프링
(a) 4빔 스프링 구조
(b) 8빔 스프링 구조 그림 10. 온도에 따른 출력전압 관계
Fig. 10. Characteristic of Temperature vs Voltage.
(a) 4 beam (b) 8 beam
(a)4빔 스프링 (b) 8빔 스프링
감도(㎶/V/g) 21.38 15.67
타축 감도(㎶/V/g) 1.08 0.94 온도특성(ppm/°C) 154.45 197.72 표 3. 가속도 센서 측정 결과
Table 3. Accelerometer measurement results.
구조가 (b)의 8빔 스프링 구조보다 안정된 옵셋 출력 전압을 보이고 있다.
표 3에서는 제작된 가속도 센서의 측정결과를 정리 하였다.
Ⅳ. 결 론
본 논문에서는 2㎜×2㎜ 크기의 실리콘 압저항형 가 속도 센서를 4빔, 8빔 스프링 구조로 설계하여 제작한 후 출력 특성을 비교하였다.
z축 가속도에 대한 감도 특성은 4빔 스프링 구조의 압저항 가속도 센서가 21.38㎶/V/g의 감도 특성을 나타 내어 8빔 스프링 압저항 가속도센서 보다 우수하였다.
타축 감도 특성은 8빔 가속도 센서가 좋게 나타났다.
온도에 따른 가속도 센서 오프셋 출력 전압은 25°C에서 85°C의 온도 구간에서 측정하였으며, 각각 (a) 154.45ppm/°C, (b)197.72ppm /°C이며 4빔 스프링 구조 가 좀 더 낮은 옵셋 전압 변화를 나타내었다.
감사의 글
이 논문은 지이센싱코리아(주)의 연구비 지원 (과제 번호 2011-0696) 에 의하여 연구되었습니다. 센서 패키 징을 도와준 정재민 과장님께 감사드립니다.
REFERENCES
[1] S. Kal, S. Das, D. K. Maurya, K. Biswas, A Ravi Sankar, S. K. Lahiri, “CMOS compatible bulk micromachined silicon piezoresistive accelerometer with low off axis sensitivity”, Microelectronics Journal, 37, 200, pp. 22–30.
[2] Petersen, K.E. Silicon Sensor Technologies. In Proceedings of the International Electron Devices Meeting, Washington, DC, USA, 1–4 December 1985; pp. 2-7.
[3] Barlian, A.A.; Park, W.T.; Mallon, J.R.; Rastegar, A.J.; Pruitt, B.L. Review: Semiconductor piezoresistance for microsystems. Proc. IEEE 2009, pp.513-552.
[4] French, P.J. Polysilicon: A versatile material for microsystems. Sens. Actuat. A 2002, pp,3-12.
[5] SangHo Lee, JunHwan Sim, JongHyun Lee,
“Fabrication of 4-Beam Piezoresistive Silicon Acceleration Sensor and Its Bump Bonding Technique”, IEEK Summer Conference Vol. 18 No. 1, 1995. 7, pp.798-801
[6] JunHwan Sim, SangHo Lee, JongHyun Lee, “ Fabrication of Bump Bonded Piezoresistive Silicon Accelerometer ”, Journal of the IEEK-D Vol.34 No.7, 1997.7, 536-542
[7] Ki Woong Park and Hyeon Cheol Kim, “Design and Fabrication of 4-beam Silicon-Micro Piezoresistive Accelerometer for TPMS Application”, Journal of the IEEK-SD Vol.49 No.
2, 2012.2, pp.1-8
[8] JunHwan Sim, DongKwon Kim, JongHyun Lee,
“Fabrication of Six-Beam Accelerometer with Self-Eliminated Off-Axis Sensitivity by Summing Circuit ”, IEEK, 1998, pp. 127-133 [9] JunHwan Sim, WooJeong Kim, InSik Yu,
JungHee Lee, “Fabrication of Piezoresistive Silicon Acceleration Sensor with Eight Beams”, IEEK Summer Conference Vol.18 No.1, 1995.6, pp. 794-797
[10] By A. Alvin Barlian, Woo-Tae Park, Joseph R.Mallon, Jr., Ali J. Rastegar, and Beth L. Pruitt,
“Review: Semiconductor Piezoresistance forMicrosystems,” proceedings of the IEEE., vol.97, 2009, pp. 530-533.
[11] G. Ionascu, Technologies of Microtechnics forMEMS (in Romanian), Ed. Cartea Universitara, Bucharest, 2004, pp. 61-97.
저 자 소 개 전 연 화(학생회원)
2013년 울산대학교 전기공학부 학사 졸업.
2015년 현재 울산대학교 전기공학부 석사 과정.
<주관심분야 : 가속도센서, 각속도센서, 반도체>
김 현 철(평생회원)-교신저자 1990년 서울대학교 전자공학과 학사 졸업.
1992년 서울대학교 전자공학과 석사 졸업.
1998년 서울대학교 전자공학과 박사 졸업.
1998년~2001년 삼성종합기술원 전문연구원 2001년~2003년 Chromux Technologies Inc.
Senior Engineer
2004년~2006년 서울대학교 BK연구교수
2006년~2007년 서울대학교 차세대트랜시버연구 센터 책임연구원
2007년~2008년 한국정보사회진흥원 책임연구원 2008년~현재 울산대학교 전기공학부 부교수
<주관심분야 : MEMS, 센서, 태양전지, 인쇄전자 부품>